结构动力学(6)-第五章 模态综合法(20080617)
- 格式:ppt
- 大小:402.50 KB
- 文档页数:20
6.4 子结构模态综合法简介在结构静力分析中,对于大型复杂结构问题往往采用子结构技术,即将结构划分为若干个子结构,先进行局部分析,然后综合组集,再作整体分析。
这种先局部后整体的分析方法是科学研究的普遍方法。
实际上有限元法本身也就是这种分析方法的具体应用。
人们为了克服大型结构动力分析的困难,从60年代以来,不断提出了各种动态子结构的方法。
通过多年的实践证明,动态子结构方法已成为解决复杂结构动力分析的有效方法。
它不仅能够大幅度降低动力方程的阶数,而且能够保证结构分析的精度。
从解决问题所采用的方式来看,一般可把动态子结构方法分为模态综合法、界面位移综合法、迁移子结构法和超单元法。
在这四类方法中,模态综合法目前使用得最为普遍。
子结构模态综合法又可称为分支结构模态综合法,它的基本思想是把一复杂结构,按其结构的特点分成若干个子结构,然后用离散化方法对子结构做各种力学分析(有时也可用实验模态分析的方法)得到各子结构的分支模态,再对各子结构的物理坐标——结点位移坐标进行模态坐标变换,并在此基础上对子结构进行组集——把所有子结构的模态坐标简单组集成整个结构的模态坐标,再通过各子结构的界面连接条件,作第二次坐标变换,消去不独立的模态坐标,即对整个结构的模态坐标进行独立坐标变换,得到一组用独立的各子结构模态坐标组成的描述整个系统运动的独立广义坐标。
由于在进行结构的模态坐标变换时,一般只选用各子结构的少数低阶分支模态,因此,组集后的整个结构的独立广义坐标数目就远小于结构离散化以后的有限元模型的整体自由度数。
由此可导出整个系统的以独立的模态坐标表示的动力方程。
这样,求解此低阶的系统动力学方程就简单多了。
以上的分析过程可以归纳为两个基本步骤:1.对子结构的分支模态坐标变换;2.利用各子结构的界面连接条件,进行第二次坐标变换,消去不独立的模态坐标。
最后得到一组独立的广义坐标。
因为模态综合方法实际上是采用子结构技术来获得一组复杂结构的品质优良的“假设模态”,此假设模态作为Ritz基所张成的模态空间可以很好的覆盖住系统的真实的低阶模态空间,所以,用模态综合法不但可以简化复杂结构的动态特性计算,而且也可以简化其响应计算。


机械振动系统,师汉民,华中科技大学出版社cos sin i t e t i t ωωω=+Ch1 单自由度线性系统自由振动1.3 无阻尼自由振动()()0mxt kx t += 解()()22002()cos sin cos cos n n n n nnv v x t x t t x t A t ωωωϕωϕωω=+=++=-振幅和相位由初始条件确定。
确定自然频率的方法: 1、 静变形法:kx mg =,n g xω=2、 能量法:无阻尼弹性振动能量守恒,因此取动能Tmax=势能Vmax 。
1.4 有阻尼自由振动22()()()020n n mx t cx t kx t s s ξωω++=⇒++= ,通解wt Ae通常自然频率可以很容易的通过实验测定,但阻尼比ξ的计算或辨识则比较困难,需要利用自由振动衰减曲线计算。
在间隔1个振动周期T 的自由振动减幅振动曲线上,取两个峰值A1和A2,A1/A2=EXP(ξωn T)Ch2 单自由度线性系统的受迫振动 2.1 谐波激励()()()cos cos mxt cx t kx t F t kA t ωω++= →22()2()()cos n n n x t x t x t A t ξωωωω++= ,设通解cos()X t ωϕ-,ϕ表响应对激励的滞后通解X1为:()20020002cos n t n n d dd v x v x xe t ξωξωξωωωω-+⎛⎫++- ⎪⎝⎭,瞬态响应,逐步衰减。
特解X2为:()()i t H Ae ωϕω-,稳态响应,实际上的激励和响应仅取实部,响应的频率是激励的频率!222222222222cos arctan cos arctan 112112n n n n n n n n AA t t i ωωξξωωωωωωωωωωξξωωωωωω⎛⎫⎛⎫⎪⎪ ⎪ ⎪-=- ⎪⎪⎛⎫⎛⎫--+- ⎪ ⎪-+ ⎪ ⎪⎝⎭⎝⎭⎝⎭⎝⎭幅频特性221()12n n X H Ai ωωωξωω==-+,相频特性222()arctan1n nωξωϕωωω=-若激励表示为i t Ae ω,响应表示为i t Xe ω,可表述()()()x t H f t ω=,则()()()i t x t H Ae ωϕω-=共振频率212r n ωωξ=-,有阻尼自然频率21d n ωωξ=-,因此,对共振的研究应考虑阻尼比ξ=0.707的特殊点。
第十章模态综合方法§10.1 模态综合法的基本原理【为什么要使用模态综合法】复杂结构自由度多,方程阶数高,计算成本大。
对整个结构用假设模态法分析难以实现。
大型复杂结构其主要部件可能在不同地区生产,由于条件限制,只能进行部件模态试验,无法进行整体结构的模态试验。
结构的响应只由低阶模态控制,不必为少数低阶模态去求解整个结构的高阶动力学方程。
【解决途径】仿照有限元方法,先对各个局部子结构进行分析,然后再通过某种方法进行整体分析,具体讲就是对各子结构进行模态分析,按某种原则得到能恰当描述整个结构振动的“假设模态” ,再按假设模态分析方法来求解整个结构的振动。
【模态综合法的基本思想】按复杂结构的特点将其划分为若干子结构对各子结构进行离散化,通过动力学分析或试验,得到子结构的分支模态。
对各子结构的物理坐标——结点位移坐标进行模态坐标变换对子结构进行“组集” ,获得整个结构的模态坐标通过子结构的界面连接条件,作第二次坐标变换—独立坐标变换,消去不独立的模态坐标,得到一组用独立的各子结构模态坐标组成的描述整个结构运动的 独立广义坐标,从而导出整个系统以独立模态坐标表示的动力学方程。
【模态综合法的实质】采用子结构技术,来获得一组复杂结构的品质优良的“假设模态”,以此假设模态作为李兹基底所张成的模态空间,可以很好地覆盖住系统真实的低阶模态 空间。
模态综合方法是子结构方法中最成熟、应用最普遍的方法。
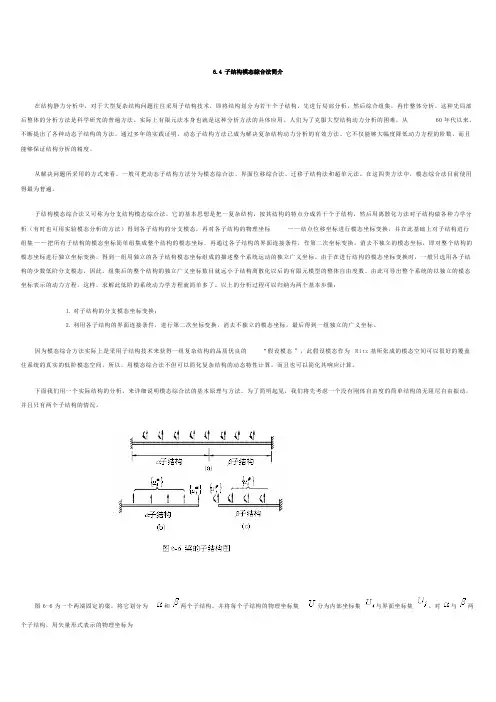
【例】以两端固支梁分成两个子结构为例,来简要说明模态综合法的基本原理 将图示的梁结构分成两个子结构界面坐标集{U j },即U iU i{U }{U }U jU j界面位移连续条件:{U j } {U j }( 10 -2)结构动能T T T -{U }T [m ]{U } -{U }T[m ]{ U }(10 — 3)2 2结构势能11V V V -{U }T [k ]{U } -{U }T[k ]{U }(10 — 4)22论[][]的求法),则有,其物理坐标集{U }分成内部坐标集{ U i }和勺 f t f t f t 门 i i t T t i "假定已经选出了各子结构合适的模态矩阵[][](下面各节中就专门讨{u } [ ]{ p } {u } [ ]{ p } (10 - 5) 通常,[],[]的个数远少于对应子结构的自由度数。
一、 结构动力学是研究什么的?包含什么内容?结构离散化有什么方法、特点?结构动力学:是研究结构体系的动力特性及其在动力荷载作用下的动力反应分析原理和方法的一门理论和技术学科。
目的:在于为改善工程结构体系在动力环境中的安全性和可靠性提供坚实的理论基础。
结构动力分析的目的:确定动力荷载作用下结构的内力和变形;通过动力分析确定结构的动力特性。
离散化方法:把无限自由度问题转化为有限自由度的过程。
1、 集中质量法:是结构动力分析最常见的处理方法,它把连续分布的质量集中为几个质量,这样就把一个原为无限(动力)自由度的问题转化为有限自由度。
特点:采用了真实的物理量,具有直接、直观的优点。
2、 广义坐标法:能决定体系几何位置的彼此独立的量。
特点:采用形函数的概念,在全部体系上插值。
虽然广义坐标表示了形函数的大小,如果形函数是位移量,则广义坐标具有位移的量纲,但只有n 项叠加后才是真实的位移物理量。
因而广义坐标实际上并不是真实的物理量。
3、 有限元法:将整个结构离散化为有限个单元,它们在有限个节点上连接,通过选用适当的形函数,对各个单元进行近似的力学分析处理,建立起单元的节点位移和相应节点之间的关系,然后按照在连接点上的力平衡条件与变形连续条件,把单元拼接成原结构。
特点:综合了集中质量法和广义坐标法的特点:1与广义坐标法相似,采用了形函数的概念,但为分片的插值,形函数的表达式相对简单;2与集中质量法相同,也采用了真实的物理量,具有直观、直接的优点。
3.每一分段所选择的位移函数可以是相同的,故计算得以简化。
4、每个节点位移仅影响其邻近的单元,所以这个方法所导得的方程大部分是非藕合的,因此解方程式的过程大大地简化。
(不作要求,仅供参考)动力荷载的类型:简谐荷载、非荷载周期荷载、冲击荷载、一般任意荷载。
(不作要求,仅供参考)结构动力计算的特点:1动力反应要计算全部时间点上的一系列的解,比静力问题复杂要消耗更多的计算时间。