机电控制工程基础:第四章 根轨迹法2
- 格式:ppt
- 大小:1.60 MB
- 文档页数:50
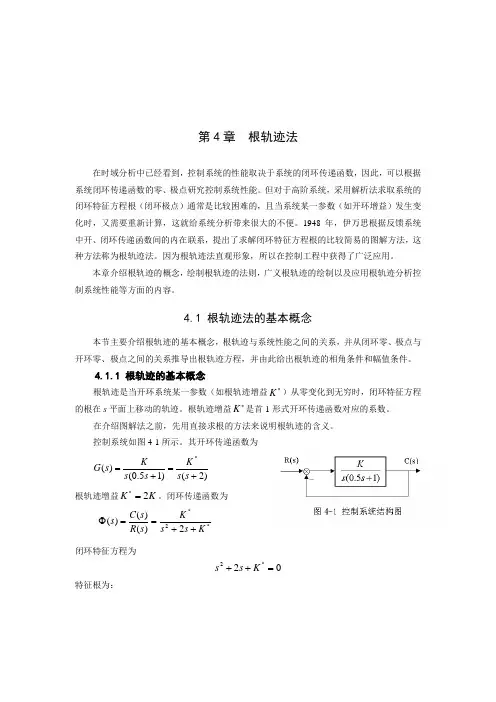
第4章 根轨迹法在时域分析中已经看到,控制系统的性能取决于系统的闭环传递函数,因此,可以根据系统闭环传递函数的零、极点研究控制系统性能。
但对于高阶系统,采用解析法求取系统的闭环特征方程根(闭环极点)通常是比较困难的,且当系统某一参数(如开环增益)发生变化时,又需要重新计算,这就给系统分析带来很大的不便。
1948年,伊万思根据反馈系统中开、闭环传递函数间的内在联系,提出了求解闭环特征方程根的比较简易的图解方法,这种方法称为根轨迹法。
因为根轨迹法直观形象,所以在控制工程中获得了广泛应用。
本章介绍根轨迹的概念,绘制根轨迹的法则,广义根轨迹的绘制以及应用根轨迹分析控制系统性能等方面的内容。
4.1 根轨迹法的基本概念本节主要介绍根轨迹的基本概念,根轨迹与系统性能之间的关系,并从闭环零、极点与开环零、极点之间的关系推导出根轨迹方程,并由此给出根轨迹的相角条件和幅值条件。
4.1.1 根轨迹的基本概念根轨迹是当开环系统某一参数(如根轨迹增益*K )从零变化到无穷时,闭环特征方程的根在s 平面上移动的轨迹。
根轨迹增益*K 是首1形式开环传递函数对应的系数。
在介绍图解法之前,先用直接求根的方法来说明根轨迹的含义。
控制系统如图4-1所示。
其开环传递函数为)2()15.0()(*+=+=s s K s s K s G根轨迹增益K K 2*=。
闭环传递函数为*2*2)()()(K s s K s R s C s ++==Φ 闭环特征方程为02*2=++K s s特征根为:*111K -+-=λ, *211K ---=λ当系统参数*K (或K )从零变化到无穷大时,闭环极点的变化情况见表4-1。
表4-1 **KK1λ2λ0 0 0 -2 0.5 0.25 -0.3 -1.7 1 0.5 -1 -1 2 1 -1+j -1-j 5 2.5 -1+j2 -1-j2 M M M M ∞∞-1+j ∞-1-j ∞利用计算结果在s 平面上描点并用平滑曲线将其连接,便得到K (或*K )从零变化到无穷大时闭环极点在s 平面上移动的轨迹,即根轨迹,如图4-2所示。
国家开放大学《机电控制工程基础》章节自测参考答案第1章控制系统的基本概念一、单项选择题(共20道题,每题3分,共60分)1.产生与被控制量有一定函数关系的反馈信号的是()a.反馈元件b.校正元件c.控制元件d.比较元件2.产生控制信号的是()a.校正元件b.比较元件c.反馈元件d.控制元件3.以下()是随动系统的特点。
a.输出量不能够迅速的复现给定量的变化b.给定量的变化规律是事先确定的c.输出量不能够准确复现给定量的变化d.输出量能够迅速的复现给定量的变化4.以下()的给定量是一个恒值。
a.有静差系统b.恒值控制系统c.无静差系统d.脉冲控制系统5.反馈控制系统通常是指()a.混合反馈b.干扰反馈c.正反馈d.负反馈6.如果系统的输出端和输入端之间不存在反馈回路,这样的系统一定是()a.闭环控制系统b.正反馈环控制系统c.开环控制系统d.复合反馈系统7.开环控制系统的精度主要取决于()a.系统的校准精度b.放大元件c.校正元件d.反馈元件8.数控机床系统是由程序输入设备、运算控制器和执行机构等组成,它属于以下()a.程序控制系统b.恒值控制系统c.开环系统d.随动控制系统9.根据控制信号的运动规律直接对控制对象进行操作的元件是()a.校正元件b.执行元件c.反馈元件d.比较元件10.没有偏差便没有调节过程,通常在自动控制系统中,偏差是通过()建立起来的。
a.放大元件b.校正元件c.反馈d.控制器11.用来比较控制信号和反馈信号并产生反映两者差值的偏差信号的元件是()a.反馈元件b.校正元件c.控制元件d.比较元件12.输入量为已知给定值的时间函数的控制系统被称为()a.程序控制系统b.有静差系统c.脉冲控制系统d.恒值控制系统13.输入量为已知给定值的时间函数的控制系统被称为()a.程序控制系统b.随动系统c.有静差系统d.恒值控制系统14.输出端与输入端间存在反馈回路的系统一定是()a.开环控制系统b.正反馈环控制系统c.闭环控制系统d.有差控制系统15.()是指系统输出量的实际值与希望值之差。
信息文本一、单项选择题(共10道题,每题4,共40分)题目1标记题目题干根轨迹出现分离点或会合点,表明()。
选择一项:A. 动态品质下降B. 系统稳定C. 系统不稳定D. 特征方程出现重根反馈对了:恭喜您,答对了。
正确答案是:特征方程出现重根题目2标记题目题干n阶系统有m个开环有限零点,则有()条根轨迹终止于S平面的无穷远处.选择一项:A. n–mB. nC. m–nD. m反馈对了:恭喜您,答对了。
正确答案是:n–m题目3标记题目题干使根轨迹向S平面()弯曲或移动的校正,可以改善系统的动态性能。
选择一项:A. 右方B. 上方C. 左方D. 下方反馈对了:恭喜您,答对了。
正确答案是:左方题目4标记题目题干增加一个开环零点,不会改变根轨迹的()。
选择一项:A. 形状和走向B. 在实轴上的分布C. 分支数D. 渐近线反馈对了:恭喜您,答对了。
正确答案是:分支数题目5获得4.00分中的4.00分标记题目题干系统的开环传递函数为,则实轴上的根轨迹为()。
选择一项:A. (-3,-2)和(0,∞)B. (-∞,-3)和(-2,0)C. (-∞,0)和(2,3)D. (0,2)和(2,∞)反馈对了:恭喜您,答对了。
正确答案是:(-∞,-3)和(-2,0)题目6正确获得4.00分中的4.00分标记题目题干开环传递函数为,则实轴上的根轨迹为()。
选择一项:A. (-∞,-5)B. (2,∞)C. (-2,∞)D. (-5,-2)反馈对了:恭喜您,答对了。
正确答案是:(-5,-2)题目7正确获得4.00分中的4.00分标记题目题干系统的开环传递函数为,则实轴上的根轨迹为()。
选择一项:A. (0,1)和(2,∞)B. (-2,-1)和(0,∞)C. (-∞,0)和(1,2)D. (-∞,-2)和(-1,0)反馈对了:恭喜您,答对了。
正确答案是:(-∞,-2)和(-1,0)题目8标记题目题干根据()条件是否满足来判断S平面上的某个点是否为根轨迹上的点。