用相位噪声和谐波分析法测量激光脉冲的时基抖动
- 格式:pdf
- 大小:299.34 KB
- 文档页数:6

时钟抖动的4大根本原因及3种查看途径时钟接口阈值区间附近的抖动会破坏ADC的时序。
例如,抖动会导致ADC在错误的时间采样,造成对模拟输入的误采样,并且降低器件的信噪比(SNR)。
降低抖动有很多不同的方法,但是,在get降低抖动的方法前我们必须找到抖动的根本原因!时钟抖动,why?时钟抖动的根本原因就是时钟和ADC之间的电路噪声。
随机抖动由随机噪声引起,主要随机噪声源包括· 热噪声(约翰逊或奈奎斯特噪声),由载流子的布朗运动引起。
· 散粒噪声,与流经势垒的直流电流有关,该势垒不连续平滑,由载流子的单独流动引起的电流脉冲所造成。
· 闪烁噪声,出现在直流电流流动时。
该噪声由携带载流子的半导体中的陷阱引起,这些载流子在释放前通常会形成持续时间较短的直流电流。
· 爆裂噪声,也称爆米花噪声,由硅表面的污染或晶格错位造成,会随机采集或释放载流子。
查看时钟信号噪声,how?确定性抖动由干扰引起,会通过某些方式使阈值发生偏移,通常受器件本身特性限制。
查看时钟信号噪声通常有三种途径:时域、频域、相位域。
咳咳,敲黑板划重点,以上三种途径的具体方法如下↓↓↓时域图图1. 抖动的时域图时钟抖动是编码时钟的样本(不同周期)间的变化,包括外部和内部抖动。
抖动引起的满量程信噪比由以下公式得出举个栗子,频率为1 Ghz,抖动为100 FS均方根值时,信噪比为64 dB。
在时域中查看时,x轴方向的编码边沿变化会导致y轴误差,幅度取决于边沿的上升时间。
孔径抖动会在ADC输出产生误差,如图2所示。
抖动可能产生于内部的ADC、外部的采样时钟或接口电路。
图2. 孔径抖动和采样时钟抖动的影响图3显示抖动对信噪比的影响。
图中显示了5条线,分别代表不同的抖动值。
x轴是满量程模拟输入频率,y轴是由抖动引起的信噪比,有别于ADC总信噪比。
图3. 时钟抖动随模拟信号增大而提升信噪比由抖动引起的信噪比和有效位数(ENOB)的关系由以下公式定义:SNR = 6.02 N + 1.76 dB其中N =有效位数。

抖动的概念及其测量方法摘要:在数字通信系统,特别是同步系统中,随着系统时钟频率的不断提高,时间抖动成为影响通信质量的关键因素。
本文介绍了时间抖动(jitter)的概念及其分析方法。
关键字:时间抖动、jitter、相位噪声、测量一、引言随着通信系统中的时钟速率迈入GHz级,抖动这个在模拟设计中十分关键的因素,也开始在数字设计领域中日益得到人们的重视。
在高速系统中,时钟或振荡器波形的时序误差会限制一个数字I/O接口的最大速率。
不仅如此,它还会导致通信链路的误码率增大,甚至限制A/D转换器的动态范围。
有资料表明在3GHz 以上的系统中,时间抖动(jitter)会导致码间干扰(ISI),造成传输误码率上升。
在此趋势下,高速数字设备的设计师们也开始更多地关注时序因素。
本文向数字设计师们介绍了抖动的基本概念,分析了它对系统性能的影响,并给出了能够将相位抖动降至最低的常用电路技术。
二、时间抖动的概念在理想情况下,一个频率固定的完美的脉冲信号(以1MHz为例)的持续时间应该恰好是1us,每500ns有一个跳变沿。
但不幸的是,这种信号并不存在。
如图1所示,信号周期的长度总会有一定变化,从而导致下一个沿的到来时间不确定。
这种不确定就是抖动。
抖动是对信号时域变化的测量结果,它从本质上描述了信号周期距离其理想值偏离了多少。
在绝大多数文献和规范中,时间抖动(jitter)被定义为高速串行信号边沿到来时刻与理想时刻的偏差,所不同的是某些规范中将这种偏差中缓慢变化的成分称为时间游走(wander),而将变化较快的成分定义为时间抖(jitter)。
图1 时间抖动示意图1.时间抖动的分类抖动有两种主要类型:确定性抖动和随机性抖动。
确定性抖动是由可识别的干扰信号造成的,这种抖动通常幅度有限,具备特定的(而非随机的)产生原因,而且不能进行统计分析。
随机抖动是指由较难预测的因素导致的时序变化。
例如,能够影响半导体晶体材料迁移率的温度因素,就可能造成载子流的随机变化。

相位噪声与时钟抖动的关系(一)
相位噪声与时钟抖动的关系
1. 相位噪声和时钟抖动的定义
•相位噪声:指随机的相位偏差,即信号在时间上的相对位置的不确定性。
•时钟抖动:指时钟信号的频率变化或周期性的相位变化。
2. 相位噪声和时钟抖动的关系
•相位噪声和时钟抖动是密切相关的概念,在很多场合可以互相转化和描述。
•时钟抖动可以看作是频率的相位噪声,而相位噪声可以看作是频率的时钟抖动。
•当时钟的频率相对稳定时,相位噪声的影响较小,主要表现为时钟抖动;当频率不稳定时,时钟抖动对相位的影响将显现为相位噪声。
3. 时钟抖动产生相位噪声的原因
•时钟抖动的产生原因多种多样,主要包括:
–温度变化引起的晶体振荡器频率漂移;
–电源噪声、电磁干扰导致的振荡器频率变化;
–振荡器本身的非线性特性引起的频率波动等。
•时钟抖动产生的相位噪声是由于时钟信号的频率波动导致信号在时间上的相对位置不断变化,进而产生了相位的不确定性。
4. 相位噪声对系统性能的影响
•相位噪声会影响系统的精度、稳定性和性能。
•在通信、雷达、测量等领域,相位噪声可能导致信号失真、干扰增加、测量误差等问题。
•在精密测量和频率合成等应用中,需要通过降低时钟抖动来减小相位噪声,以提高系统的精度和性能。
5. 总结
•相位噪声和时钟抖动密切相关,可以相互转化和描述。
•时钟抖动产生的相位噪声主要是由于时钟信号的频率波动引起的。
•相位噪声对系统性能的影响很大,需要降低时钟抖动来减小相位噪声。
摘要:这是一篇关于时钟(CLK)信号质量的应用笔记,介绍如何测量抖动和相位噪声,包括周期抖动、逐周期抖动和累加抖动。
本文还描述了周期抖动和相位噪声谱之间的关系,并介绍如何将相位噪声谱转换成周期抖动。
几乎所有集成电路和电气系统都需要时钟(CLK)。
在当今世界中,人们以更快的速度处理和传送数字信息,而模拟信号和数字信号之间的转换速率也越来越快,分辨率越来越高。
这些都要求工程师更多地关注时钟信号的质量。
时钟信号的质量通常用抖动和相位噪声来描述。
抖动包括周期抖动,逐周期抖动和累计抖动,最常用的是周期抖动。
时钟的相位噪声用来说明时钟信号的频谱特性。
本文首先简单介绍用来测量时钟抖动和相位噪声的装置。
然后介绍周期抖动和相位噪声之间的关系,最后介绍将相位噪声谱转换成周期抖动的简单公式。
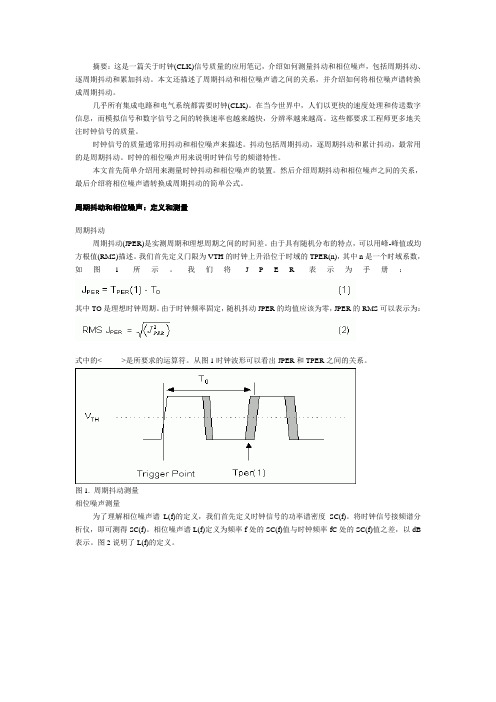
周期抖动和相位噪声:定义和测量周期抖动周期抖动(JPER)是实测周期和理想周期之间的时间差。
由于具有随机分布的特点,可以用峰-峰值或均方根值(RMS)描述。
我们首先定义门限为VTH的时钟上升沿位于时域的TPER(n),其中n是一个时域系数,如图1所示。
我们将J P E R表示为手册:其中TO是理想时钟周期。
由于时钟频率固定,随机抖动JPER的均值应该为零,JPER的RMS可以表示为:式中的<>是所要求的运算符。
从图1时钟波形可以看出JPER和TPER之间的关系。
图1. 周期抖动测量相位噪声测量为了理解相位噪声谱L(f)的定义,我们首先定义时钟信号的功率谱密度SC(f)。
将时钟信号接频谱分析仪,即可测得SC(f)。
相位噪声谱L(f)定义为频率f处的SC(f)值与时钟频率fC处的SC(f)值之差,以dB 表示。
图2说明了L(f)的定义。
图2. 相位噪声谱的定义相位噪声谱L(f)的数学定义为:注意L(f)代表的是fC和f处谱值的比,L(f)将在下文介绍。
周期抖动(JPER)测量有许多设备可以测量周期抖动。
通常人们会用高精度数字示波器测量抖动。
测量时钟频率的相位噪声和相位抖动时出现的问题分析
20log(N)规则
首先,是对20log(N)规则的快速回顾:
如果一个时钟的载波频率下降了N倍,那么我们预计相位噪声会减少20log(N)。
例如,每个除以因子2的除法应该导致相位噪声减少20log(2)或大约6dB。
这里的主要假设是无噪声的传统数字分频器。
为什么是这样?实际数字分频器的输出是上升沿和下降沿,信号处于逻辑高电平或低电平。
抖动仅出现在上升沿和下降沿。
抖动对每个时钟周期的比例降低。
我们的直觉可能表明,如果我们减少抖动边缘的数量,那么我们减少了分频时钟传输的抖动。
事实证明是正确的。
这可以写成:
相位抖动会怎样?
我们整合了SSB相位噪声L(f)[dBc / Hz],以获得以秒为单位的RMS相位抖动,如下所示:从f1到f2的偏移频率以Hz为单位进行积分,其中f0是载波或时钟频率。
在实践中,所涉及的数量足够小,对于良好的时钟来说,对于12kHz到20MHz的抖动带宽,RMS相位抖动大约在10s到100s的飞秒数量级上。
请注意,以秒为单位的RMS相位抖动与f0成反比。
当频率被分频时,相位噪声L(f)下降20log(N)。
然而,由于频率也下降了N,以时间为单位表示的相位抖动是恒定的。
因此,与20log(N)相关的相位噪声曲线在抖动带宽上具有相同的相位噪声形状,预计会在几秒钟内产生相同的相位抖动。
例子
我们来看一个具体的例子。
作为一个实验,我拿了一个Si5345抖动衰减器,输入一个25MHz的时钟,并配置它,使我只改变一个(内部)输出分频因子2,以获得从800MHz。
相位噪声和抖动的概念及其估算方法相位噪声是指信号相位的随机变化,包括相位偏移和频率变化。
它可以由信号在频率上扩展的能量来描述。
相位噪声对于许多系统来说是非常严重的问题,因为它会导致信号失真,限制系统的精度和性能。
相位噪声可以通过将信号与参考信号进行比较来测量,通常使用频谱分析法来估算。
抖动是指信号周期性的时移变化,通常是由于时钟信号的不稳定性引起的。
抖动可以看作是相位噪声的一种特殊形式,但它更关注短期和周期性的时间偏移。
抖动可以通过测量信号上相邻周期的时间差来估算。
1.频谱分析法:这是最常用的相位噪声估算方法。
通过将信号与参考信号进行频谱分析,可以得到相位噪声的频谱密度。
频谱密度描述了信号在不同频率上的相位随机变化程度,从而提供了相位噪声的估计。
2.相位瞬时法:相位瞬时法通过观察信号上相邻采样点之间的相位差异来估算相位噪声。
它可以通过计算信号的瞬时相位和瞬时频率来获得。
3.时隙法:时隙法是一种抖动估算方法,通过测量信号在不同时钟周期上的时间差异来估计抖动。
它可以使用高精度的时钟信号对待测信号进行采样,然后利用时隙间的时间差来计算抖动。
4.皮亚诺法:皮亚诺法是一种抖动估算方法,通过测量信号在一段时间内的累积相位偏移来估计抖动。
它利用计时器和参考时钟来测量信号的周期和时钟周期之间的偏移,从而计算抖动。
以上方法只是相位噪声和抖动的估算方法中的一部分,根据不同的应用和实际需求,还可以使用其他方法来进行估算。
在实际应用中,为了获得准确的估算结果,通常需要考虑到噪声的频率范围、采样率和信号特性等因素,选择合适的估算方法和参数。
相位噪声和抖动的估算是一个相对复杂的问题,在实际应用中需要结合具体情况进行综合考虑和分析。
胡为东系列文章之七相位噪声的时域测量方法美国力科公司胡为东摘要:相位噪声主要是衡量因信号的相位变化而带来的噪声,在频域中表现为噪声的频谱,在时域中又表现为信号边沿位置的抖动,因此在实际应用中,相位噪声和信号的抖动其实本质是相同的。
本文就将对相位噪声以及TIE抖动(Time Interval Error,时间间隔误差,也叫相位抖动)的概念及相互关系做一简要介绍并详细介绍了使用力科示波器如何测量TIE 抖动并将其转换为相位噪声的。
关键词:力科相位噪声TIE 抖动一、相位噪声的基本概念一个时钟信号或者一个时钟信号的一次谐波可以用一个如下的正弦波形来表示:(),其中为时钟频率,为初始相位,如果为常数,那么的傅里叶变换频谱图应该为一条谱线,如图1中的左图所示,但是如果发生变化,则原本规则的周期正弦信号在变化的过程中将会出现拐点,且频谱也将变得不仅仅是一条谱线,而是可能由分布在时钟频率周围的很多条谱线构成的更为复杂的频谱图,如图1中的右图所示,其中频谱波形在fc附近多出的谱线即为相位噪声谱(或者叫做相位抖动谱)。
因为初始相位的变化而引起的噪声称为相位噪声,因此对于一个正弦时钟信号或者时钟信号的一次谐波来说,在理论上应该是为零的,此时上述公式中的则完全为相位噪声成分。
fcAfcA图1 正弦信号的频谱(无相位变化以及有相位变化的可能情形)为了更为精确的描述相位噪声,通常定义其为在某一给定偏移频率处的dBc/Hz值,其中,dBc是以dB为单位的该频率处功率与总功率的比值。
如一个振荡器在某一偏移频率处的相位噪声定义为在该频率处1Hz带宽内的信号功率与信号的总功率比值,即在fm频率处1Hz范围内的面积与整个噪声频下的所有面积之比,如下图2所示。
图2 相位噪声的基本定义二、TIE抖动的基本概念及其与相位噪声的关系TIE(Time Interval Error),时间间隔误差,是指信号的实际边沿与其理想边沿之间的偏差,理想边沿可以为固定频率信号的边沿位置,如100MHZ的信号,那么上升边沿位置就固定在10ns的整数倍位置处;也可以通过CDR(时钟数据恢复)的方法恢复出的时钟作为理想时钟。
如何理解相位噪声与时间抖动的关系?RF测试笔记是业界一线工程师们通过理论和实践相结合的方式介绍射频微波测试技术的专栏,主要涵盖噪声系数、数字调制、矢网、频谱分析、脉冲信号等内容。
如有想看到的内容或技术问题,可以在文尾写下留言。
每当介绍相位噪声测试方案时,都会提到时间抖动,经常提到二者都是表征信号短期频率稳定度的参数,而且是频域和时域相对应的参数。
正如题目所示,相位噪声与时间抖动有着一定的关系,那么相噪是与哪种类型的抖动相对应,彼此之间又有着怎样的数学关系,这些疑问都将在文中找到答案。
1. 相位噪声与时间抖动概述相位噪声通常是针对CW信号而言的,是表征信号频谱纯度的非常重要的参数,衡量了信号频率的短期稳定度。
相位噪声是频域的参数,在时域还有一个与之对应的参数——随机抖动,二者之间存在一定的数学关系,可以相互转换。
在前面关于相位噪声测试的文章中,给出了IEEE早期关于相噪的定义,同样的,关于时间抖动,SONET规范也给出了相应的定义:“Jitter is defined as the short-term variations of a digital signal’s significant instants from their ideal positions in time”.抖动定义中给出了三个要素:(1) significant instants,通常是指信号的上升沿或者下降沿;(2) ideal positions in time,这是指信号上升沿或下降沿在时间维度上的理想位置;(3) short-term variations,信号实际上升沿或下降沿相对于理想位置时间偏移的短期波动。
虽然定义中只提到了数字信号,但实际上具有普遍适用性,当然对于CW信号也是适用的。
上述定义所给出的是一种综合性抖动,按照不同的原因机制,又可以分解为多种不同的抖动分量,包括:随机抖动,周期性抖动,数据相关抖动,占空比失真等。
相位噪声和抖动是对同一种现象的两种不同的定量方式。
在理想情况下,一个频率固定的完美的脉冲信号(以1 MHz为例)的持续时间应该恰好是1微秒,每500ns有一个跳变沿。
但不幸的是,这种信号并不存在。
如图1所示,信号周期的长度总会有一定变化,从而导致下一个沿的到来时间不确定。
这种不确定就是相位噪声,或者说抖动。
相位噪声是频率域的概念。
相位噪声是对信号时序变化的另一种测量方式,其结果在频率域内显示。
用一个振荡器信号来解释相位噪声。
如果没有相位噪声,那么振荡器的整个功率都应集中在频率f=fo处。
但相位噪声的出现将振荡器的一部分功率扩展到相邻的频率中去,产生了边带(sideband)。
从图2中可以看出,在离中心频率一定合理距离的偏移频率处,边带功率滚降到1/fm,fm是该频率偏离中心频率的差值。
相位噪声通常定义为在某一给定偏移频率处的dBc/Hz值,其中,dBc是以dB为单位的该频率处功率与总功率的比值。
一个振荡器在某一偏移频率处的相位噪声定义为在该频率处1Hz带宽内的信号功率与信号的总功率比值。
相位噪声产生的原因信号源热噪声,内部损耗电阻热噪声,混频器件电流散弹噪声及本振相位噪声,具体是温度过热关系。
相位噪声的定义定义1:相位噪声是指单位Hz的噪声密度与信号总功率之比,表现为载波相位的随机漂移,是评价频率源(振荡器)频谱纯度的重要指标源自: 有线数字电视传输特性与故障解析《中国有线电视》2005年赵雨境,王恒江定义2:相位噪声是指光的正弦振荡不稳定,时而出现某处相位的随机跳变.相位噪声导致光源线宽变宽.光强度噪声是指因自发辐射光强的随机变化和外界温度的变化,导致发射光强的起伏源自: Fabry-Perot干涉式光纤温度传... 《传感器技术》2001年曹满婷来源文章摘要:分析了温度对相位的调制作用以及Fabry -Perot干涉结构检测相位变化的原理,提出了一种具有高灵敏度和高分辨率的相位调制型全光纤结构,并进行了系统的噪声分析。