Pushover分析方法一般过程
- 格式:docx
- 大小:294.00 KB
- 文档页数:19

M i das进行P ushover分析的总结 1.1版-----完全是个人体会,有所错误在所难免一.不得不说的基本概念1.P ushover是什么和前提条件P ushover也叫推倒分析,是一种静力弹塑性分析方法,或者叫非线性静力分析方法,在特定前提下,可以近似分析结构在地震作用下的性能变化情况。
给桥梁用某种方式,比如墩顶集中力方式,施加单调增加的荷载,相应的荷载位移关系就会呈现明显的非线性特征。
这里可以认为IO是处在正常使用状态,LS为承载能力极限状态,CP是完全倒塌破坏。
从IO开始结构开始进入弹塑性状态,在LS前结构的损伤尚可修复,且结构整体是安全的,而越过LS 损伤就难以修复了,但是CP前还不至于倒塌。
设计中对于不同构件或部位,在特定地震作用下,其性能要求是不一样的。
而特定的前提很明确,就是在整个地震反应时程中,结构反应由单一振型控制,在《公路桥梁抗震细则》(以下简称《细则》)中,认为常规桥梁中的规则桥梁都满足这一条件(条文说明 6.3.4),因此E1地震可以采用简化反应谱方法,也可用一般的多振型反应谱方法,E2则用Pus hover。
2.P ushover的分析目的在E2地震作用下,《细则》要求:可见,对于规则桥梁,只需要检算墩顶位移就可以了。
对于单柱墩,容许位移可按7.4.7条推荐的公式进行计算,而双柱墩按7.4.8条要求进行Pus hover分析根据塑性铰的最大容许转角(7.4.3)得到。
而无论是7.4.3还是7.4.7都要用到Φy和Φu,对于圆形或者矩形截面可按附录B计算,而特殊的截面,可按7.4.4和7.4.5的要求计算。
计算方法可以自己编程实现,也可用现成的软件如R es ponse2000等来作为工具。
而对于在特定的E2地震作用下,墩顶的位移,都需要用P ushover的能力谱法得到。
所以Pus hover的目的一个是画出荷载位移曲线后,找到塑性铰达到最大容许转角时的曲线点,计算出墩顶容许位移,第2个目的是应用能力谱法,找到性能点,得到E2地震作用下,墩顶的位移。

Pushover分析是基于性能设计的有力工具。
基于性能的设计可以使工程师更深入的理解和控制不同荷载水平下的结构行为。
SAP2000的非线性版本提供了Pushover分析功能。
进行Pushover分析的一般过程如下。
下面列出了Pushover分析的一般步骤,注意,其中某些步骤是由SAP2000自动完成的。
1)建立结构和构件的计算模型。
2)定义框架铰属性并指定其给框架/索单元。
3)定义钢或混凝土设计可能需要的任意荷载工况和静力与动力分析工况,特别是使用默认铰时。
4)运行设计需要的分析。
5)若任何混凝土铰属性是基于程序计算的默认值时,必须进行混凝土设计,这样确定配筋。
6)若任何钢铰基于程序对于自动选择框架界面计算的默认值,必须进行钢设计且接受程序选择的截面。
7)定义Pushover分析所需的荷载工况,包括:ν重力荷载和其他可能在施加横向地震荷载前作用在结构的荷载。
可能在前面对于设计已经定义了这些荷载工况。
ν用来推结构的横向荷载。
若准备使用加速度荷载或模态荷载,不需要任何新的荷载工况,虽然模态荷载需要定义一个模态分析工况。
8)定义Pushover分析使用的非线性静力分析工况,包括:ν一系列的一个或多个使用荷载控制的从零开始施加重力和其他固定荷载的工况。
这些工况包括阶段施工和几何非线性。
ν从此系列开始并施加横向Pushover荷载的一个或多个Pushover工况。
这些荷载应使用位移控制。
被监测的位移通常位于结构的顶部,将用来绘制Pushover曲线。
9)运行Pushover分析工况。
10)审阅Pushover结果:绘制Pushover曲线、显示铰状态的变形形状、力和弯矩图形,且打印或显示需要的结果。
11)按需要修改模型并重复。
应考虑几种不同的横向Pushover工况来代表可能在动力加载时发生的不同顺序的响应,这是很重要的。
特别地,应在X和Y两个方向推结构,且可能在两者间有角度。
对于非对称结构,在正和负方向推结构可能产生不同的结果。
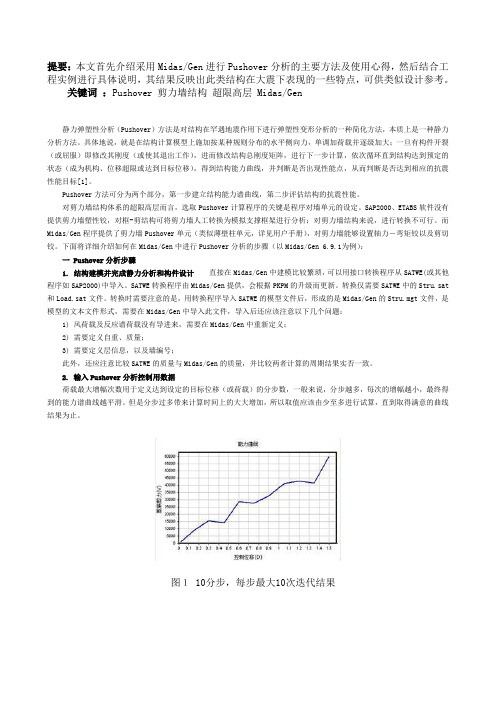
提要:本文首先介绍采用Midas/Gen进行Pushover分析的主要方法及使用心得,然后结合工程实例进行具体说明,其结果反映出此类结构在大震下表现的一些特点,可供类似设计参考。
关键词:Pushover 剪力墙结构超限高层 Midas/Gen静力弹塑性分析(Pushover)方法是对结构在罕遇地震作用下进行弹塑性变形分析的一种简化方法,本质上是一种静力分析方法。
具体地说,就是在结构计算模型上施加按某种规则分布的水平侧向力,单调加荷载并逐级加大;一旦有构件开裂(或屈服)即修改其刚度(或使其退出工作),进而修改结构总刚度矩阵,进行下一步计算,依次循环直到结构达到预定的状态(成为机构、位移超限或达到目标位移),得到结构能力曲线,并判断是否出现性能点,从而判断是否达到相应的抗震性能目标[1]。
Pushover方法可分为两个部分,第一步建立结构能力谱曲线,第二步评估结构的抗震性能。
对剪力墙结构体系的超限高层而言,选取Pushover计算程序的关键是程序对墙单元的设定。
SAP2000、ETABS软件没有提供剪力墙塑性铰,对框-剪结构可将剪力墙人工转换为模拟支撑框架进行分析;对剪力墙结构来说,进行转换不可行。
而Midas/Gen程序提供了剪力墙Pushover单元(类似薄壁柱单元,详见用户手册),对剪力墙能够设置轴力-弯矩铰以及剪切铰。
下面将详细介绍如何在Midas/Gen中进行Pushover分析的步骤(以Midas/Gen 6.9.1为例):一 Pushover分析步骤1. 结构建模并完成静力分析和构件设计直接在Midas/Gen中建模比较繁琐,可以用接口转换程序从SATWE(或其他程序如SAP2000)中导入。
SATWE转换程序由Midas/Gen提供,会根据PKPM的升级而更新。
转换仅需要SATWE中的Stru.sat 和Load.sat文件。
转换时需要注意的是,用转换程序导入SATWE的模型文件后,形成的是Midas/Gen的Stru.mgt文件,是模型的文本文件形式,需要在Midas/Gen中导入此文件,导入后还应该注意以下几个问题:1) 风荷载及反应谱荷载没有导进来,需要在Midas/Gen中重新定义;2) 需要定义自重、质量;3) 需要定义层信息,以及墙编号;此外,还应注意比较SATWE的质量与Midas/Gen的质量,并比较两者计算的周期结果实否一致。

静力弹塑性分析(Pushover分析)■简介Pushover分析是考虑构件的材料非线性特点,分析构件进入弹塑性状态直至到达极限状态时结构响应的方法。
Pushover分析是最近在地震研究及耐震设计中经常采用的基于性能的耐震设计(Performance-BasedSeismicDesign,PBSD)方法中最具代表性的分析方法。
所谓基于性能的耐震设计就是由用户及设计人员设定结构的目标性能(targetperformance),并使结构设计能满足该目标性能的方法。
Pushover分析前要经过一般设计方法先进行耐震设计使结构满足小震不坏、中震可修的规范要求,然后再通过pushover分析评价结构在大震作用下是否能满足预先设定的目标性能。
计算等效地震静力荷载一般采用如图2.24所示的方法。
该方法是通过反应修正系数(R)将设计荷载降低并使结构能承受该荷载的方法。
在这里使用反应修正系数的原因是为了考虑结构进入弹塑性阶段时吸收地震能量的能力,即考虑结构具有的延性使结构超过弹性极限后还可以承受较大的塑性变形,所以设计时的地震作用就可以比对应的弹性结构折减很多,设计将会更经济。
目前我国的抗震规范中的反应谱分析方法中的小震影响系数曲线就是反应了这种设计思想。
这样的设计方法可以说是基于荷载的设计(force-baseddesign)方法。
一般来说结构刚度越大采用的修正系数R越大,一般在1~10之间。
但是这种基于荷载与抗力的比较进行的设计无法预测结构实际的地震响应,也无法从各构件的抗力推测出整体结构的耐震能力,设计人员在设计完成后对结构的耐震性能的把握也是模糊的。
基于性能的耐震设计中可由开发商或设计人员预先设定目标性能,即在预想的地震作用下事先设定结构的破坏程度或者耗能能力,并使结构设计满足该性能目标。
结构的耗能能力与结构的变形能力相关,所以要预测到结构的变形发展情况。
所以基于性能的耐震设计经常通过评价结构的变形来实现,所以也可称为基于位移的设计(displacement-baseddesign)。

问: 在MIDAS/Gen中做Pushover分析的步骤?
答: Pushover Analysis 中文又称为静力弹塑性分析或推倒分析。
在MIDAS/Gen中混凝土结构和钢结构的静力弹塑性分析的步骤不尽相同。
混凝土结构的静力弹塑性分析步骤为分析->设计->静力弹塑性分析。
钢结构的静力弹塑性分析步骤为分析分析->静力弹塑性分析。
即混凝土结构必须经过配筋设计之后才能够做静力弹塑性分析,因为塑性铰的特性与配筋有关。
设计结束后,静力弹塑性分析的步骤如下:
1. 在静力弹塑性分析控制对话框中输入迭代计算的控制数据。
2. 定义静力弹塑性分析的荷载工况。
在此对话框中可选择初始荷载、位移控制量、是否考虑重力二阶效应和大位移、荷载的分布形式(推荐使用模态形式)。
3.定义铰类型(提供标准类型,用户也可以自定义)
4.分配塑性铰。
用户可以全选以后,按"适用"键。
5. 运行静力弹塑性分析。
6. 查看分析曲线。

PUSHOVER分析方法全攻略作为一种常用的风险评估方法,PUSHOVER分析(Pushover Analysis)是一种基于位移的结构性能评估方法,可用于评估结构在地震等外部力作用下的破坏性能。
PUSHOVER分析的基本原理是通过对结构进行逐步加载,计算结构的位移响应,并在每个加载级别上评估结构的非弹性变形。
其中,位移响应与荷载之间的关系被表示为荷载位移曲线(Load-displacement Curve),曲线上的各点对应于结构在不同荷载水平上的位移响应。
为了进行PUSHOVER分析,以下是一些主要步骤和技术,供参考:1.结构模型准备首先,需要准备一个精确的结构模型,包括准确的几何形状、结构材料性质以及荷载。
模型可以通过各种建模软件进行创建,如ETABS、SAP2000等。
2.定义截面性能曲线对于每个结构构件,需要定义其截面的性能曲线。
这些曲线一般采用双切模型(Bi-linear Model)或多切模型(Multi-linear Model)来表示构件的力-位移响应。
3.建立非线性弹簧模型根据结构的截面性能曲线,需要建立每个构件的非线性弹簧模型。
这些弹簧模型可以通过弹簧刚度系数和屈服强度等参数来表示。
4.定义加载方式定义结构的加载方式,包括单项或多项加载。
在推进分析中,通常采用单项加载,即逐步增加水平荷载。
5.设定分析参数根据需要,设定分析的参数,包括推进步长、最大推进步数以及各构件的水平刚度。
6.进行PUSHOVER分析根据设定的加载方式和分析参数,进行PUSHOVER分析。
在每个加载步骤中,计算结构的位移响应,并绘制荷载位移曲线。
7.评估结构性能根据荷载位移曲线,评估结构的性能,包括塑性铰的形成、破坏模式以及结构的侧向刚度退化等。
8.修正分析结果在分析过程中,根据实际情况对模型进行修正。
例如,在形成塑性铰后,可以调整结构的刚度或强度参数。
9.分析结果报告最后,将分析结果整理成报告,包括结构的性能评估、塑性铰的位置和破坏模式等信息。
Pushover分析:基本概念静力非线性分析方法(Nonlinear Static Procedure),也称Pushover 分析法,是基于性能评估现有结构和设计新结构的一种方法。
静力非线性分析是结构分析模型在一个沿结构高度为某种规定分布形式且逐渐增加的侧向力或侧向位移作用下,直至结构模型控制点达到目标位移或结构倾覆为止。
控制点一般指建筑物顶层的形心位置;目标位移为建筑物在设计地震力作用下的最大变形。
Pushover方法的早期形式是“能力谱方法”(Capacity Spectrum Method CSM),基于能量原理的一些研究成果,试图将实际结构的多自由度体系的弹塑性反应用单自由度体系的反应来表达,初衷是建立一种大震下结构抗震性能的快速评估方法。
从形式上看,这是一种将静力弹塑性分析与反应谱相结合、进行图解的快捷计算方法,它的结果具有直观、信息丰富的特点。
正因为如此,随着90年代以后基于位移的抗震设计(Diaplacement-Based Seismic Design,DBSD)和基于性能(功能)的抗震设计(Performance-Based Seismic Design. PBSD)等概念的提出和广为接受,使这种方法作为实现DBSD和PBSD的重要工具,得到了重视和发展。
这种方法本身主要包含两方面的内容:计算结构的能力曲线(静力弹塑性分析)、计算结构的目标位移及结果的评价。
第一方面内容的中心问题是静力弹塑性分析中采用的结构模型和加载方式;第二方面内容的中心问题则是如何确定结构在预定地震水平下的反应,目前可分为以ATC-40为代表的CSM和以FEMA356为代表的NSP (Nonlinear Static Procedure,非线性静力方法),CSM的表现形式是对弹性反应谱进行修正,而NSP则直接利用各种系数对弹性反应谱的计算位移值进行调整。
两者在理论上是一致的。
在一些文献中将第一方面的内容称为Pushover,不包括计算目标位移和结果评价的内容。
Pushover分析是基于性能设计的有力工具。
基于性能的设计可以使工程师更深入的理解和控制不同荷载水平下的结构行为。
SAP2000的非线性版本提供了Pushover分析功能。
进行Pushover分析的一般过程如下。
下面列出了Pushover分析的一般步骤,注意,其中某些步骤是由SAP2000自动完成的。
1)建立结构和构件的计算模型。
2)定义框架铰属性并指定其给框架/索单元。
3)定义钢或混凝土设计可能需要的任意荷载工况和静力与动力分析工况,特别是使用默认铰时。
4)运行设计需要的分析。
5)若任何混凝土铰属性是基于程序计算的默认值时,必须进行混凝土设计,这样确定配筋。
6)若任何钢铰基于程序对于自动选择框架界面计算的默认值,必须进行钢设计且接受程序选择的截面。
7)定义Pushover分析所需的荷载工况,包括:ν重力荷载和其他可能在施加横向地震荷载前作用在结构的荷载。
可能在前面对于设计已经定义了这些荷载工况。
ν用来推结构的横向荷载。
若准备使用加速度荷载或模态荷载,不需要任何新的荷载工况,虽然模态荷载需要定义一个模态分析工况。
8)定义Pushover分析使用的非线性静力分析工况,包括:ν一系列的一个或多个使用荷载控制的从零开始施加重力和其他固定荷载的工况。
这些工况包括阶段施工和几何非线性。
ν从此系列开始并施加横向Pushover荷载的一个或多个Pushover工况。
这些荷载应使用位移控制。
被监测的位移通常位于结构的顶部,将用来绘制Pushover曲线。
9)运行Pushover分析工况。
10)审阅Pushover结果:绘制Pushover曲线、显示铰状态的变形形状、力和弯矩图形,且打印或显示需要的结果。
11)按需要修改模型并重复。
应考虑几种不同的横向Pushover工况来代表可能在动力加载时发生的不同顺序的响应,这是很重要的。
特别地,应在X和Y两个方向推结构,且可能在两者间有角度。
对于非对称结构,在正和负方向推结构可能产生不同的结果。
当在一给定的方向推结构时,可考虑水平荷载在竖向的不同分布,如在此方向的第一和第二模态。
点击定义>分析工况命令,选择分析工况类型为Static、分析类型为非线性。
如下图所示。
1.荷载施加控制Pushover 分析一般需要多个分析工况。
一个典型的Pushover 分析可能由3个工况构成:第一个将施加重力荷载给结构,第二个和第三个可施加不同的横向荷载。
Pushover 工况可以从零初始条件开始,或从前一个Pushover工况结束处的结果开始。
例如,重力工况从零初始条件开始,而两个横向工况的每一个从重力工况的结束处开始。
因为Pushover 分析是非线性的,所以将其分析结果和其它线性或非线性分析叠加是不合理的。
当按规范要求比较Pushover的结果时,需要在Pushover工况内施加所有适当的设计荷载组合。
这可能需要多种不同的Pushover工况来考虑所有规范规定的设计规范荷载组合。
当进行Pushover 分析时,必须在结构上施加代表惯性力的分布静荷载。
一般地,将荷载定义为下面一个或多个的比例组合:1)自定义的静荷载工况或组合。
2)作用于任意的整体X、Y、Z方向的均匀加速度。
在每一节点的力和分配给节点的质量成比例,且作用在指定的方向。
3)从指定特征类型或RITZ类型振型的振型荷载。
在每一节点的力和振型位移,振型角频率平方,及分配给节点的质量成比例。
力作用于振型位移方向。
对其他类型的分布形式,可以定义OTHER类型的静力荷载工况,分布为侧向分布的均匀或倒三角形分布,然后使用此静力荷载工况作为侧向荷载的分布。
比例系数在位移控制情况下只表示相对比例,不代表荷载的绝对数值。
2.分析控制参数点击对应施加荷载、结果保存、非线性参数对应的修改/显示按钮可以对Pushover 分析的其他控制参数进行设置。
在Pushover分析中,荷载与指定的荷载样式成比例的施加给结构。
指定荷载样式的初始乘数为零。
随着Pushover 分析的进行,此乘数逐步增加,直至到达指定的Pushover 结尾,或在某些情况直至结构不能承受附加的荷载。
可使用两种不同的方法来控制Pushover分析中施加在结构上的荷载:荷载控制和位移控制。
每一个Pushover工况可使用力控制或位移控制。
选择一般依赖于荷载的物理性质和期望的结构行为。
在力控制时,需施加一定的荷载样式。
使用此种荷载控制方法可以简单地将当前力的增量施加给结构。
例如,假定当前施加给结构的力为150kN。
在力控制时,SAP2000可简单的施加此荷载的50kN的增量于结构。
在已知期望的荷载水平(如重力荷载),且结构可以承受此荷载时,应该使用力控制。
若结构因材料屈服或失效,或几何不稳定而不能承受指定荷载,Pushover分析将停止。
当位移控制时,将施加荷载直至在监控点的位移等于预先指定的位移。
使用此种控制方法时,SAP2000先计算需要产生此位移增量的力增量,并施加此力增量至结构。
例如,假定结构监控点的当前位移为3cm。
进行位移控制时,SAP2000可简单地添加1cm的增量至此位移,来得到4cm的总位移。
然后SAP2000估计得到此位移所需的力,并施加此力于结构。
因为在此荷载增加过程中可能发生结构的屈服或失效,SAP2000可进行试算和迭代来找到产生期望位移增量的荷载。
若结构不稳定,则荷载增量可能为负。
当寻求指定的位移(如在地震荷载中),所施加的荷载预先未知,或当结构期望失去强度或失稳时,应使用位移控制。
虽然随着结构承载力的变化,所施加荷载可以增加或减少,预先存在的荷载(如重力)不会改变。
若结构失去重力承载力,Pushover分析在到达目标位移前将停止。
耦合位移通常是在一个给定的指定荷载下,对结构中最敏感位移的测量。
它是结构中所有位移自由度的一个加权总和:每个位移分量乘以在那个自由度上施加的荷载,并对结果求和(所施加荷载作的功)。
若选择使用共轭位移来进行荷载控制,其将被使用来决定是否荷载应被增加或减少。
所指定的监控位移将用来设置位移目标,即结构应移动多远。
推荐使用耦合位移,即勾选使用耦合位移选项,对分析的收敛有帮助。
在监测位移区域中的监测一行上,定义要监测的点及其自由度位移分量。
应选择一个对荷载(即荷载样式中定义的荷载)敏感的监测位移。
例如,当荷载作用在方向UY上的时候,通常不应该监测自由度UX。
同样不应监测靠近约束的节点。
如果可能,监测位移在分析过程中最好是单调增加的。
保存分析结果时,仅保存正位移增量表示SAP2000将不保存位移增量为负时的分析结果。
材料非线性参数区域显示材料非线性属性,主要用于非线性时程及收缩徐变。
将在后面章节介绍。
几何非线性参数。
选中无选项时,不考虑结构的几何非线性效应。
选择P-△选项时,将运行P-△迭代,可部分考虑结构的几何非线性效应,计算耗时比第一项多。
当结构不是很柔时,建议使用该选项。
大位移选项用于出现明显变形的较柔的结构(如索结构),以及屈曲分析。
对于一般的结构,建议使用P-△选项。
建议首先运行分析而不以P-△进行(选择无选项),随后增加几何非线性效应。
当选择P-△和大变形选项时,按照变形后的几何形状建立平衡方程,最为精确,计算耗时很多。
所有平衡方程基于变形后的结构,这可能需要大量的反复迭代。
当结构很柔时,建议使用该选项。
3.求解控制在每个时间步求解非线性方程。
这可能需要重新形成和重新求解刚度矩阵,进行迭代直至解收敛。
若不能实现收敛,则程序将步分割为更小的步再次运行。
每阶段最大总步数是分析中允许的最多步数,可以包含保存的步和结果未被保存的中间子步。
此值对分析时间进行控制。
以一个较小值开始,得到分析所用时间的认识。
如果分析在最大总步数里没有达到它的目标荷载或位移,可以用比较大数目的步数再一次运行分析,运行一次非线性静力分析的时间大致和总步数成正比。
每阶段最大空步数表示在非性求解过程中,每步允许的空步数。
空步发生于:1)一个框架铰试图卸载2)一个事件(屈服、卸载等)引发另一事件3)迭代不收敛和尝试了一较小的步。
过多的空步数可能表示,由于灾难性的失效或数值敏感而导致求解停止。
可设置一定的空步数,这样若收敛困难,求解将结束。
如果不想分析由于空步数到达而结束,则设置此值等于最大总步数。
每步最大迭代数用来确保在分析的每一步达到平衡。
在程序试图使用一个较小的子步前,用户可控制在每步允许的迭代数目。
在多数情况默认值是适用的。
迭代收敛容差(相对)用来确保在分析的每一步建立平衡。
可设置相对收敛容差来比较作用在结构上的力值和它的误差。
对于大变形问题,需要使用比其他非线性类型小得多的收敛容差值,以得到好的结果。
尝试减小此值直至得到一致的结果。
事件凝聚容差(相对)是非线性解算法对于框架铰使用“事件到事件”的策略。
若模型中有大量的铰,则会产生大量的求解步。
事件凝聚容差用来将事件聚合在一起,从而减少求解时间。
当一个铰屈服或移至力—位移(弯矩—转动)曲线的另一段时,触发一个事件。
若其他的铰接近经历自己的事件时,在事件容差内,它们将被视为好象它们到达了事件。
这会引起在力(弯矩)水平的小量误差,在这些水平发生屈服或节段的改变。
指定一个较小的事件容差将增加分析的准确性,代价是需要更多的计算时间。
4.内力重分配当卸载一个铰的时候,程序必须设法移除铰所承受的荷载并且可能要再分配它到剩余的结构上。
当应力应变(力-变形或弯矩-转角)曲线显示出承载力下降时,铰卸载发生。
在动力分析中提供稳定性和一个唯一的解。
在Pushover分析中,解决这个不稳定问题需要特殊的方法。
有多种方法来处理此类行为,这些方法必须能将以前由铰承担的荷载重新分配至其余的结构,并计算结构的新的承载力。
一个铰的失效可引发其它铰快速的连续失效,从而导致结构的整体坍塌。
SAP2000 使用三种方法:卸载整个结构、施加局部重分配、使用割线刚度重新开始。
卸载整个结构。
使用卸载整个结构的力重分配方法暂时减少施加于结构的荷载,直至所考虑的铰内荷载达到可接受的水平。
当其卸载时,铰的刚度被取作其初始刚度;即假定为刚性的。
在铰内的力被减少至期望的水平后,所施加的荷载再次增加。
此方法是三个方法中计算效率最高的,建议首先使用这一方法。
如果铰卸载时结构中的荷载没有很明显的减少,该方法会工作得很好。
如果在同一个单元中两个铰竞相卸载,该方法将失效(即,一个铰需要应用的荷载增加时而另一个要求荷载减少),分析将会停止并显示信息“找不到一个解”,这时应该试一试另外两个方法之一。
应用局部重分配。
使用施加局部重分配方法施加在所考虑的铰处施加相等且反向的修正力,并然后重新在结构内分配这些力。
此过程是一个反复迭代的过程,直至在所考虑铰的力减少至期望的水平。
例如,若一个柱轴向铰受压,且在力-变形曲线上到达点C,施加局部重分配的方法将在包含该铰的框架单元之外施加等值且反向的修正力。