基于内模控制策略的自整定PID控制器_何承波[1]
- 格式:pdf
- 大小:117.23 KB
- 文档页数:5
基于内模法的PID控制器自整定算法作者:夏浩李柳柳来源:《计算机应用》2015年第09期摘要:为解决传统工业控制中比例积分微分(PID)控制器参数整定的问题,提出了一种基于内模法(IMC)以及系统辨识的控制器参数确定算法。
该方法首先利用被控过程在开环阶跃信号激励下,输入与暂态输出的对应关系,将被控对象辨识为一阶加滞后(FOPDT)或二阶加时滞(SOPDT)的模型;再利用IMC算法确定控制器的参数。
对于在内模法中引入的滤波器参数λ的确定问题,提出通过引入γ和σ两个参数,并与输出误差的平方建立关系来确定λ 的方法。
仿真显示,对于输出误差绝对值之和(IAE)这个指标,该种算法与传统基于IMC的PID 控制算法相比,在无输入扰动时可提高20%左右,在有输入扰动时可提高10%左右。
仿真结果表明:在用单位阶跃信号激励系统时,提出的整定方法在保证了系统鲁棒性的前提下,提高了系统的瞬态响应速度,并有效抑制了系统输出的超调。
关键词:内模控制;系统辨识;比例积分微分控制;自整定0 引言控制器在工业生产过程中发挥了重要作用,传统的比例积分微分(ProportionalIntegralDerivative, PID)控制器由于其自身易设计、易调节、易应用的特点,受到了广泛的应用。
然而,随着工业过程的日渐现代化,传统PID控制器与智能控制的结合受到了广大研究人员的青睐,智能PID控制包括模糊PID控制器、神经网络PID控制器、遗传算法PID控制器[1]及基于内模法(Internal Model Control, IMC)的IMCPID控制器[2]等。
IMCPID控制器针对大纯滞后系统具有良好的鲁棒性和随动跟踪控制性能,且只需要调节该控制器的一个参数就可以达到期望的闭环响应。
针对基于IMC的PID控制器设计,许多文献针对特定的问题都提出了一些新的控制方法或调谐策略。
例如,当被控对象模型中存在纯积分环节时,文献[3]提出基于频率响应匹配的PID控制器参数设计方法,文献[4]提出了通过将纯积分环节近似为具有大时间常数的一阶滞后环节。
论文基于内模控制的PID在过程控制中的应用研究毕业设计报告(论文)基于内模控制的PID在过程控制中的应用研究所属系化工与制药工程系专业化学工程与工艺学号06110341姓名王大林指导教师陈夕松起讫日期2014.1---2014.5设计地点东南大学四牌楼校区动力楼119东南大学成贤学院毕业设计报告(论文)诚信承诺本人承诺所呈交的毕业设计报告(论文)及取得的成果是在导师指导下完成,引用他人成果的部分均已列出参考文献。
如论文涉及任何知识产权纠纷,本人将承担一切责任。
学生签名:日期:基于内模控制的PID在过程控制中的应用研究摘要内模控制是基于过程数学模型而进行控制器设计的一种新型控制策略。
内模控制具有很多优点,如设计简单,控制性能好,性能分析优越等。
随着工业过程自动化的普及,过程控制越来越受到控制界的广泛关注。
内模控制就是其中之一,它是以控制内部数学模型为基础,通过控制内部模型来达到控制整个系统稳定,进而达到工业过程生产指标的要求。
所以内模控制不仅是一种先进的控制算法,而且是研究预测控制模型的控制策略的重要理论基础!本论文基于东南大学过程控制实验室HGK-1型过程控制实验平台,以该平台中的液位过程为研究对象,设计基于可编程序控制器(PLC)的过程控制系统,采用内模控制(IMC)算法,仿真并实验研究IMC在该过程中的应用效果。
通过本次学习掌握IMC原理及算法,为以后在工作中的工程实际应用打下良好的铺垫!论文在介绍了HGK-1型过程控制实验平台后,阐述了液位过程建模的方法和特点。
在机理建模,试验建模和混合建模中选用试验建模方法建立了被控过程的数学模型。
设计液位过程PLC控制系统,包括液位计、流量计、调节阀、PLC输入/输出模块的接线,以及与PC机间的通讯连接。
仿真比较了IMC-PID控制及IMC的动态与静态性能。
为进一步提高控制系统的动静态性能,设计采用串级IMC控制方案,既提高了系统的动态特性,又保证了系统的稳态精度。
一种自校正PID控制器的建模与仿真李荃;吴翔;夏洪【摘要】把自校正控制原理与传统PID控制算法相结合,以传统PID控制器为基础,推导出了一种用递推最小二乘法的算式对PID参数进行整定的方法。
仿真结果表明,该方法法能较好地对PID控制系统进行参数估计,克服了传统算法需处理较大数据量,不利于参数实时在线估计等问题,增强了控制系统对被控对象的自适应能力。
该算法兼有传统PID控制和自校正控制的优点,是一种原理简明,收敛较快的控制器。
【期刊名称】《电子制作》【年(卷),期】2015(000)004【总页数】2页(P46-47)【关键词】自校正控制;PID控制;最小二乘法【作者】李荃;吴翔;夏洪【作者单位】东华理工大学江西省新能源工艺及装备工程技术研究中心江西南昌330013;东华理工大学江西省新能源工艺及装备工程技术研究中心江西南昌330013;东华理工大学江西省新能源工艺及装备工程技术研究中心江西南昌330013【正文语种】中文【中图分类】TP273传统控制方法较为适于线性定常系统。
实际工程应用中,很多被控对象或过程是时变系统。
在工况和条件改变后,系统的的结构参数会产生变化。
传统的控制算法对时变系统往往达不到很好的控制效果。
为此需要能够自动补偿模型在参数、输入信号方面的难于预知的变化。
这就是自适应控制的任务。
而自校正控制是其中重要的一种。
自校正控制在1958年由R.Kalman提出,但由于当时的计算机技术条件,没有付诸实现。
1973年K.J.Astrom和B.Wittenmark提出了一种自校正控制器实现方案,较好地解决了对非线性,变工况被控对象的控制,因而得到广泛的应用。
近年来自校正控制的研究与应用得到较快发展,出现了多种控制算法和辨识算法。
如文献[2]采用了自校正模糊控制策略解决多变量非线性控制问题;文献[3]提出了基于遗传算法(GA)的自校正PID用于化工过程温度控制;文献[4]提出了一种改进的基于最小方差的自校正控制算法,其对于最小相位系统和非最小相位系统都具有良好的适用性。
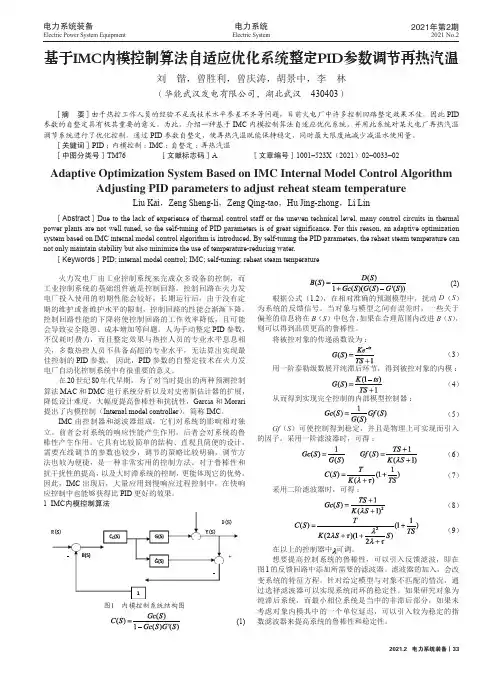
图3 优化后PID曲线
将基于IMC内模控制算法自适应优化系统用于火电厂再
热汽温调节系统的PID参数优化,使得系统具有优良的调节
使再热汽温控制的两种方式(燃烧器摆角和减温水控制)
之间达到平衡,使再热汽温既能保持稳定同时最大限度的减
少减温水使用量,既节省了人工整定PID参数的大量精力,
消除了因整定效果不佳而造成的系统振荡等危险因素。
目前
通过运用该系统已使再热汽温稳定运行在±3℃以内,同时通
过限制燃烧器摆角的动作速率和动作幅度,在尽可能少的影
响炉膛燃烧的情况下,减少了相同工况下,再热汽温达到稳
定所需部分减温水量,可在此基础上继续提高这种交叉控制
方式的稳定性和经济性。
参考文献
锦廉. 基于改进量子粒子群算法的火电厂再热汽温调节系统
参数自整定[J]. 机电信息,2020(8):5-6.
南,张玉艳,迟新利.基于变参数PID的火电厂过热汽温控制
沈阳工程学院学报(自然科学版),2008(2):150-152.
图2 优化前PID曲线。
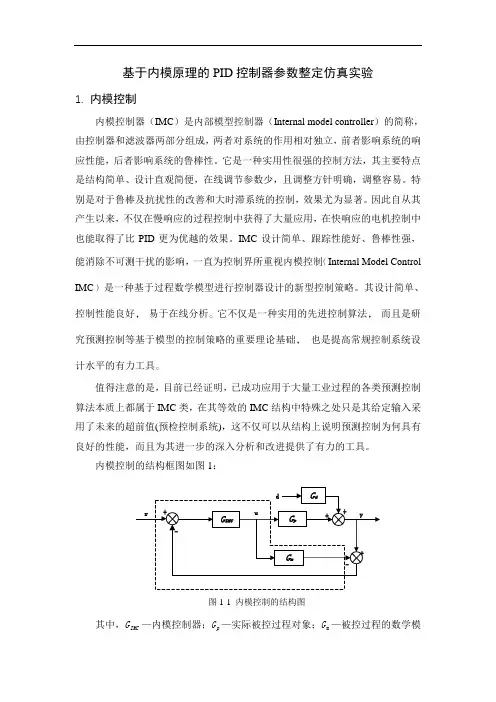
基于内模原理的PID 控制器参数整定仿真实验1. 内模控制内模控制器(IMC )是内部模型控制器(Internal model controller )的简称,由控制器和滤波器两部分组成,两者对系统的作用相对独立,前者影响系统的响应性能,后者影响系统的鲁棒性。
它是一种实用性很强的控制方法,其主要特点是结构简单、设计直观简便,在线调节参数少,且调整方针明确,调整容易。
特别是对于鲁棒及抗扰性的改善和大时滞系统的控制,效果尤为显著。
因此自从其产生以来,不仅在慢响应的过程控制中获得了大量应用,在快响应的电机控制中也能取得了比PID 更为优越的效果。
IMC 设计简单、跟踪性能好、鲁棒性强,能消除不可测干扰的影响,一直为控制界所重视内模控制( Internal Model Control IMC ) 是一种基于过程数学模型进行控制器设计的新型控制策略。
其设计简单、控制性能良好, 易于在线分析。
它不仅是一种实用的先进控制算法, 而且是研究预测控制等基于模型的控制策略的重要理论基础, 也是提高常规控制系统设计水平的有力工具。
值得注意的是,目前已经证明,已成功应用于大量工业过程的各类预测控制算法本质上都属于IMC 类,在其等效的IMC 结构中特殊之处只是其给定输入采用了未来的超前值(预检控制系统),这不仅可以从结构上说明预测控制为何具有良好的性能,而且为其进一步的深入分析和改进提供了有力的工具。
内模控制的结构框图如图1:图1-1 内模控制的结构图其中,IMC G —内模控制器;p G —实际被控过程对象;m G —被控过程的数学模型; d G —扰动通道传递函数。
(1)当0)(,0)(≠=s G s R d 时,假若模型准确,即)()(s G s G m p =,由图可知,)]()(1)[()]()(1)[()(IMC IMC s G s G s G s G s G s G s Y m d d -=-=p ,假若“模型可倒”,即)(1s G m 可以实现,则可令)(1)(IMC s G s G m =,可得0)(=s Y ,不管)(s G d 如何变化,对)(s Y 的影响为零。
第25卷第1期2008年3月 广东工业大学学报Journa l of Guangdong Un i versity of Technology Vol.25No .1 M arch 2008收稿日期:2007205229作者简介:刘 洋(19802),男,硕士研究生,主要研究方向为控制理论与控制工程.基于内模控制的P I D 参数整定及仿真刘 洋,王钦若(广东工业大学自动化学院,广东广州510006)摘要:介绍了内模控制的发展历史及基本原理,分析了其控制器的设计方法,提出了一种利用Tayl or 级数展开的基于内模控制(I nternalModel contr ol,I M C )的P I D 控制器参数整定的方法.通过对热交换器P I D 温度调节闭环控制系统的MAT LAB 实例仿真,将I M C 2P I D 整定的效果与传统P I D 进行对比,论证其控制效果明显优于其它经典P I D 整定,显示了其实际工程应用价值.关键词:非线性大时滞大惯性;内模控制;I M C 2P I D 控制;仿真中图分类号:TP273 文献标识码:A 文章编号:100727162(2008)0120066203 在工业生产过程当中,常常需要用闭环控制方式来控制温度、压力、流量、液位和速度等连续变化的模拟量.P I D 调节是经典控制理论中最典型的用于闭环控制系统的调节方法.尽管生产实际中约90%的控制问题都可用简单的P I D 控制器来解决,但对于非线性大时滞大惯性多变量耦合的系统,传统的P I D 方法很难达到良好效果.因此,对于非线性大时滞大惯性系统的控制方法的研究很有必要.内模控制(I nternal Model Contr ol,I M C )是一种基于过程数学模型进行控制器设计的新型控制策略[1].其设计简单、控制性能良好,易于在线分析.它不仅是一种实用的先进控制算法,而且是研究预测控制等基于模型的控制策略的重要理论基础,也是提高常规控制系统设计水平的有力工具.自20世纪50年代后期起,许多研究者已经开始采用类似内模控制的概念来设计最优控制器,如S m ith 的时滞预估补偿控制器,Francis 、W ha m 等人的基于内部模型的调节器设计方法.基于对过程动态模型求逆来设计控制器的方法一般不易实现,使得内模原理难以成为一种工程设计方法.1974年,德国学者Frank 首先提出了图1所示的内模控制结构.1979年,B r o 2sil ow 在其推断控制的基础上,进一步论证了图1的内模结构是推断控制和S m ith 预估控制器的核心,并给出了内模控制器的设计方法.1982年,Gracia 和Morari 完整地提出并发展了图1的控制结构,并将其定名为内模控制.之后,Morari 等人深入地研究了内模控制的性质、设计方法,将I M C 推广到多输入多输出和非线性系统,使得基于过程动态模型求逆来设计控制器的思想得到工程化.本文拟利用Tayl or 级数展开,对被控对象的大时滞环节进行近似处理,再结合已知的被控对象模型参数来求解P I D 控制器的增益、积分时间和微分时间等参数.并通过对热交换器P I D 温度调节闭环控制系统的MAT LAB 仿真,将I M C 2P I D 整定效果与传统P I D 进行对比,以论证其特性和实际工程应用价值.1 内模控制原理内模控制的结构框图如图1[2],G I M C (s )—内模控制器,G P (s )—过程,G ′P (s )—过程模型,G d (s )—扰动通道传递函数.将图1等价变换为如图2所示的简单反馈控制系统,图2进一步可以用图3来表示.图1 内模控制的结构框图图2 I M C 的等价结构框图图3 I M C 与反馈结构的关系框图 对于图2的内环反馈控制器有G C (s )=G I M C (s )1-G I M C (s )G ′P (s );(1)系统输入输出关系可以表达为y (s )r (s )=G C (s )G P (s )1+G C (s )G P (s );(2)系统扰动的输入输出关系可以表达为y (s )d (s )=G d (s )1+G C (s )G P (s ).(3)将式(1)代入式(2)、(3)中,得到系统的闭环响应为y (s )=G I M C (s )G P (s )r (s )1+G I M C (s )[G P (s )-G ′P (s )]+[1-G I M C (s )G ′P (s )]G d (s )1+G I M C (s )[G P (s )-G ′P (s )],系统的反馈信号为d ′(s )=[G P (s )-G ′P (s )]u (s )+G d (s )d (s ). 如果模型准确,即G ′P (s )=G P (s ),无外部扰动,即d (s )=0,则模型的输入y ′与过程的输出y 相等,此时反馈信号为零.这样,在模型不确定和无未知输入的条件下,内模控制系统具有开环结构.这就清楚地表明,对开环稳定的过程而言,反馈的目的是克服过程的不确定性.在工业实际过程控制时,克服扰动是控制系统的主要任务,而模型的不确定性是难免的.此时,在图1所示的I M C 结构中,反馈信号d ′(s )就反映了过程模型的不确定性和扰动的影响,从而构成了闭环控制结构.2 I M C 2P I D 控制器参数整定及仿真2.1 I M C 2P I D 控制器设计由图3可知,G I M C (s )=G C (s )1+G C (s )G ′P (s ),设一阶带纯滞后系统的模型为G ′P (s )=K P T P s +1e-p s.内模控制器设计分为两步进行[3].首先设计一个稳定的理想控制器,而不考虑系统的鲁棒性和约束;其次引入滤波器,通过调整滤波器的结构和参数来获得期望的动态品质和鲁棒性.1)对G ′P (s )进行分解:G ′P (s )=G ′P +(s )・G ′P -(s ),此处,G ′P +(s )是一个全通滤波器传递函数,对于所有频率w,满足G ′P +(jw )=0.事实上,G ′P +(s )包含了所有时滞和右半平面零点.G ′P -(s )是具有最小项位特征的传递函数,即G ′P -(s )稳定且不包含预测项.取G ′P +(s )=e-p s,G ′P -(s )=K PT P s +1.2)引入低通滤波器:f (s )=1(1+αs )n ,选择f (s )的目的是使得G I M C (s )变为有理,α为滤波器仅有的设计参数,它决定闭环系统的响应速度.根据内模控制器表达式G I M C (s )=G ′-1P -(s )(1+αs )n ,(4)其中G ′-1P -(s )是过程模型的可逆部分,用作内模控制器,1(1+αs )n 为低通滤波器.将式(4)代入式(1)得,G C (s )=G ′-1P -(s )/(1+αs )n 1-G ′P +(s )(1+αs )n=1S f (s ),f (s )=G ′-1P -(S )[(1+αs )n-G ′P +(s )]/s.令D (s )=[(1+αs )n-G ′P +(s )]/s.(5)将(5)式用Tayl or 级数在s =0处进行展开得D (0)=αn -((G ′P +(0))′,D ′(0)=[n (n -1)α2-((G ′P+(0))″]/2,D ″(0)=[n (n -1)(n -2)α2-((G ′P +(0)) ]/3.(6)由于函数f (s )及一阶、二阶导数在s =0处的值f (0)=1K P D (0),f ′(0)=-[(G ′P -(0))′D (0)+K P D ′(0)](K P D (0))2,f ″(0)=f ′(0)[(G ′P -(0))″D (0)+2(G ′P -(0))′D ′(0)+K P D ″(0)(G ′P -(0))′D (0)+K P D ′(0)+2f ′(0)/f (0)],(7)其中K P =G ′P -(0).将f (s )展开成s 的Tayl or 级数有:G C (s )=1sf (0)+f ′(0)s +f ″(0)2s 2+…,理想的P I D 具有如下算式:G C (s )=K C (1+1T I s+T D s ),比较以上两个等式,并且结合(6)、(7)两式可以计算得到P I D 控制器的参数为[4]:K C =f ′(0)=T IK P (α+P),T I =f ′(0)f (0)=T P +76 第1期 刘 洋,等:基于内模控制的P I D 参数整定及仿真 2P2(α+P ),T D =f ″(0)2f ′(0)=2P 2(α+P)1-P3T I.2.2 MAT LAB 实例仿真若被控对象为一阶带纯滞后系统的模型G ′P (s )=K P T P s +1e-P s,表1给出了几种不同方法的P I D 控制器参数.热交换器出口温度与蒸汽流量的关系,即被控对象为G ′P (s )=1s +1e -s,即K P =1,=1,T =1,α=0.1. 根据表1[1],计算得到的P I D 控制器参数如表2.利用MAT LAB 中的Si m ulink 功能来模拟P I D 控制,其仿真原理框图如图4[526],4种方法得到的单位阶跃响应如图5.表1 几种不同方法的P I D 控制器参数方法K CT IT PZiegler 2N ichols 112K P T2T 015T Cohen 2Coon K P T (43+T 4)T (32+6T /)(13+8T /)4T (11+2T /)Eivera I M C(2+T )2(α+T )+T2T2+T 本文I M C 2P I DT I K P (α+P )+T22(α+T )T22(α+T )(1-T3T P)表2 热交换器P I D 控制器参数方法K CT IT PZiegler 2N ichols 1.220.5Cohen 2Coon 1.51.80.3Eivera I M C1.41.50.3本文I M C 2P I D0.91.450.3图4 仿真原理框图图5 4种整定方法的单位阶跃响应曲线3 结束语对一阶带纯滞后非线性大时滞大惯性的被控对象,将I M C 结构与P I D 控制器参数整定的方法相结合,很好地解决了传统P I D 整定方法的不足之处.由图5可以看出,I C 2P I D 参数整定的单位阶跃响应速度快、无振荡、超调量小,其控制效果明显优于其它经典P I D 整定方法.复杂工业被控对象可以通过曲线拟合和传递函数降阶等方法近似地转化为一阶带纯滞后非线性系统.因此,如何应用特定的控制设备(如P LC 、工控机、单片机等)实现I M C 2P I D 的最优算法,具有重要的理论和工程实践意义,将有待于进一步的研究.参考文献:[1]王树青.先进控制技术及应用[M ].北京:化学工业出版社,2001.[2]高东杰,谭杰,林红权.应用先进控制技术[M ].北京:国防工业出版社,2003.[3]谭功全,陈永会.内模控制器的一种简单设计[J ].自动化与仪器仪表,2002,1(1):11215.[4]王鸿,高学军,刘乐星.智能内模控制器的研究[J ].广东工业大学学报,1999,16(1):24227.[5]钟祎勍,李克鹏.基于MAT LAB 的内模控制器的简单设计实现[J ].P LC &F A,2004,15(8):1092112.[6]刘金琨.先进P I D 控制MAT LAB 仿真[M ].北京:电子工业出版社,2004.(下转第85页)86 广 东 工 业 大 学 学 报 第25卷 [5]吴桂金.基于ANSYS 的AC /CRC 层间剪应力分析[J ].公路与汽运,2005,109(4):69271.[6]陶向华,黄晓明,刘荫成.车辆荷载作用下路桥段结构的动态响应分析[J ].公路交通科技,2005,9(22):7211.[7]胡少伟.结构振动理论及其应用[M ].北京:中国建筑工业出版社,2005.The Nu m er i ca l Ana lysis of Com posite Pavem en t under M ov i n g L oadHu Jun 2feng 1,Zhang Rong 2hui 1,Luo Shao 2m ing2(1.Faculty of Constructi on;2.Faculty of Electr omechanical Engineering,Guangdong University of Technol ogy,Guangzhou 510006,China )Abstract:The dyna m ic res ponse questi on of composite pave ment under moving l oad is analyzed by using the finite 2ele ment nu merical calculati on method .The finite 2ele ment entity model is built in this paper and the dyna m ic re 2s ponse analysis f or sandwich structure is comp leted .The change of the stress and dis p lace ment of composite pave 2ment under different vehicle s peed is discussed res pectively .The computed result shows that vehicle s peed makes an i m portant effect on structure dyna m ic res ponse and the influence of vibrati on and i m pulsive l oad must be consid 2ered in the pave ment design and the fatigue life design .Key words:composite pave ment;moving l oad;dyna m ic analysis(上接第68页)P I D Param eters Tun i n g and S im ul a ti on Ba sed on I n terna l M odel Con trolL iu Yang,W ang Q in 2ruo(Faculty of Aut omati on,Guangdong University of Technol ogy,Guangzhou 510006,China )Abstract:This thesis intr oduces the devel opment hist ory and basic p rinci p le of internal model contr ol,elaborates the design of I M C contr oller and p r oposes the way of Tayl or p r ogressi on P I D para meter tuning based on internal model contr ol .ByMAT LAB si m ulati on f or the heater te mperature cl osed 2l oop contr ol syste m based on I M C 2P I D ,the effect of I M C 2P I D para meters tuning is compared with that of traditi onal P I D para meters tuning,its better character 2istics are de monstrated and the p ractical app licati on value is better than other ways .Key words:nonlinear and l ong 2ti m e delay inertial syste m;internal model contr ol (I M C );I M C 2P I D contr ol;si m u 2lati on58 第1期 胡俊锋,等:移动荷载下复合路面的数值分析 。

基于内模控制的PID控制器参数整定1绪论1.1设计目的在工业过程中,简单的PID控制可以解决约90%的控制问题,然而对于强耦合多变量过程、强非线性过程和大时滞过程,常规PID控制难以得到满意的控制效果。
PID控制器的各种优化设计方法和参数整定方法已成为解决上述过程控制问题的一种途径。
采用内模控制原理可以提高PID控制器的设计水平。
与经典PID控制相比,内模控制仅有一个整定参数,参数整定与系统动态品质和鲁棒性的关系比较明确。
1.2内模控制的简介1.2.1内模控制的主要特点内模控制的特点是被控对象与具有逆模型特性的控制器相串联,并与内模相并联。
在模型匹配时,实现系统动态特性的开环控制;当模型失配或有干扰存在时,采用在反馈通道中插入反馈滤波器的方法,通过适当地选取滤波器的结构和参数,可以有效地抑制输出振荡,并可获得所期望的动态特性和鲁棒性;而输入滤波器用于柔化控制动作,对设定值起平滑和柔化作用,以减小突加干扰对系统带来的冲击。
内模控制与传统反馈控制相比,其主要优点有:内模控制方案设计简单,比较容易获得良好的动态响应,同时能兼顾稳定性和鲁棒性,并能消除不可测干扰对系统的影响。
内模控制结构最大的优点是把伺服问题与鲁棒性及其抗干扰性问题分开处理,进而使分析、设计和调整都大为简化,同时又能像Smith 预估器那样适用于大时滞系统。
内模控制结构的关键是建立对象的正模型、逆模型,以及如何设计反馈滤波器来提高系统的稳定鲁棒性。
1.2.2内模控制的研究进展内模控制自八十年代产生以来,已有20多年的历史,在这段时间里,经过众多控制工作者的努力,内模控制不论在控制器本身的设计上,还是在与其它控制方法的结合上,或者是在向非线性、多变量系统的扩展上,都取得了长足的进步,为其广泛应用打下了坚实的基础。
尽管生产实际中约有90%的控制问题都可用简单的PID控制器来解决,但对于有较大纯滞后、明显非线性、多变量耦合的系统,采用内模控制是非常适合的。
基于继电器反馈的自整定PID调节器设计白迎斌【摘要】PID控制是目前过程工业应用最普遍的控制方法之一.但是简单PID控制不能很好地适应对象系统特性变化时的最佳控制要求,而人工调整参数在控制精度和调整频度上均不可能满足时时变化的对象系统的控制要求.目前己有的多种具有PID参数自整定功能的智能调节器大多整定复杂并对实际控制过程有影响.鉴于PID控制方法目前仍有广泛应用,PID参数自整定调节器的设计将具有很好的应用价值和市场空间.针对应用现状,提出并实现了一种基于继电器反馈,具有自整定功能的PID调节器的设计.【期刊名称】《甘肃科技》【年(卷),期】2016(032)007【总页数】3页(P10-12)【关键词】PID控制;继电器反馈;自整定;调节器【作者】白迎斌【作者单位】兰州交通大学机电工程学院,甘肃兰州730070【正文语种】中文【中图分类】TP23PID控制是目前过程工业应用最普遍的控制方法之一。
但是简单PID控制不能很好地适应对象系统特性变化时的最佳控制要求,而人工调整参数在控制精度和调整频度上均不可能满足时时变化的对象或系统的控制要求。
目前己有的多种具有PID参数自整定功能的智能调节器大多整定复杂并对实际控制过程有影响。
鉴于PID控制方法目前仍有广泛应用,PID参数自整定设计将具有很好的应用价值。
同时,工业装置在运行过程中,过程对象的动态特性会发生或大或小的变化,实现PID参数的自整定,可以在过程特性发生变化以后使控制器参数随之作相应的变化,即可使PID控制器具有一定的自适应控制能力。
继电器反馈自整定PID调节器可以应用在简单过程控制系统、复杂过程控制系统,能完成自动整定PID初始参数、自动在线优化PID参数,保证系统在优化的情况下工作。
调节器具有节省人工、优化运行、配置简单等特点,使控制系统的投运、调试、运行简便、高效。
继电自整定PID参数的基本思路是在控制系统中设置两种模式:自整定模式和调节模式。
专利名称:一种基于传统PID控制器附加二次比例系数的自适应参数整定方法
专利类型:发明专利
发明人:崔冠冠,戴敬超,龙小军,黄科科,周正,欧璐
申请号:CN201811367629.4
申请日:20181116
公开号:CN109298631A
公开日:
20190201
专利内容由知识产权出版社提供
摘要:本发明涉及一种基于传统PID控制器附加二次比例系数的自适应参数整定方法,其在PID控制器中加入了关于系统偏差的二次项,这样使得比例系数随着系统偏差在不断地改变,增加了灵活性,本发明针对此类PID控制器进行了整定方法的研究,通过选择加入二次比例参数的时机来完整该控制器的参数整定,优化后的方法的稳定性更强,抗干扰能力强,且适用性广。
申请人:楚天智能机器人(长沙)有限公司
地址:410600 湖南省长沙市宁乡经济技术开发区金洲大道四段197号
国籍:CN
代理机构:北京旭路知识产权代理有限公司
代理人:王莹
更多信息请下载全文后查看。
基于内模控制器的PID参数整定丁攀;干树川【期刊名称】《软件》【年(卷),期】2014(000)005【摘要】参考单输入单输出(SISO)系统内模控制器的设计方法,设计针对一阶时滞和二阶时滞过程的内部控制器。
时滞部分采用一阶Pade近似方法,按麦克劳林展开和同次项系数相等的方法分别整定PID控制器的参数。
选取模型进行仿真,结果证明:两种方法都能取得良好控制效果,但是同次项系数相等的方法稍微优于麦克劳林展开法。
%Reference to the method of designing internal mode controller in the single-input-single-output (SISO) system,a internal controller was designed for ifrst-order and second-order Delay Process. The ifrst order Pade approximation replaces the delay part,taking vantageof the method of expansion by McLaughlin and same coefifcient equalingto determine the parameters of PID controller respectively. Select the model to simulate and it turns out that both methods achieve good control effect,but McLaughlin expansion method is slightly better than the same coefifcient method.【总页数】3页(P54-56)【作者】丁攀;干树川【作者单位】四川理工学院,四川自贡 643000;四川理工学院,四川自贡 643000【正文语种】中文【中图分类】TP301【相关文献】1.基于内模控制的PID参数整定及仿真 [J], 刘洋;王钦若2.基于内模控制的PID参数整定在车牌半成品生产线反光膜张力控制中的应用 [J], 王玲;黄凤华3.基于二自由度内模控制的PID参数整定方法研究 [J], 高峰4.基于内模的过热汽温串级控制系统PID参数整定 [J], 胡文斌;韩璞;刘淼5.基于Clipper控制器数控伺服系统的PID参数整定 [J], 杨峰;董颖怀;薛威;李振亮;朱江因版权原因,仅展示原文概要,查看原文内容请购买。
一种基于内模PID控制的主动队列管理算法
罗鸣;牛玉刚
【期刊名称】《计算机工程与应用》
【年(卷),期】2007(043)031
【摘要】针对传统主动队列管理中PID控制存在的参数不易整定等缺点,通过引入内模控制思想,提出了一种基于内模控制的PID控制器(IMC-PID),其突出特点是控制器仅有一个参数需要整定.将IMC-PID应用于网络拥塞控制中,得到了一种新的主动队列管理(AQM)算法--IMC-PID算法.仿真实验表明,IMC-PID算法有较强的鲁棒适应性及较快的队长调节速率.
【总页数】4页(P111-114)
【作者】罗鸣;牛玉刚
【作者单位】华东理工大学,信息科学与工程学院,上海,200237;华东理工大学,信息科学与工程学院,上海,200237
【正文语种】中文
【中图分类】TP393
【相关文献】
1.基于模糊PID控制的主动队列管理算法研究 [J], 虞洋;陆锦军
2.基于自适应模糊神经网络PID控制器的主动队列管理算法 [J], 宋炯;杨维和;张嘉智;闫忠孝
3.基于内模控制的自适应主动队列管理算法 [J], 林开司;林开武;张露
4.一种基于积分分离的内模PID主动队列管理算法 [J], 罗鸣;牛玉刚
5.基于遗传算法的模糊内模PID控制器优化 [J], 余哲;王志国;刘飞
因版权原因,仅展示原文概要,查看原文内容请购买。
基于继电反馈的PID参数自整定
侯洪;韩震宇
【期刊名称】《机电工程技术》
【年(卷),期】2014(000)007
【摘要】针对PID参数难以整定的不足,提出一种基于继电反馈的PID自整定方法。
该方法利用继电反馈原理对PID参数进行自整定,从而提高了参数整定的灵
活性。
给出了基于任意相位裕度的PID参数自整定公式,并进行了仿真实验验证。
【总页数】4页(P63-65,187)
【作者】侯洪;韩震宇
【作者单位】四川大学,四川成都 610065;四川大学,四川成都 610065
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于继电反馈的PID自整定方法在Buck-Boost电路中的应用 [J], 刘羽西;孙培德;
2.基于继电反馈的PID自整定方法在Buck-Boost电路中的应用 [J], 刘羽西;孙培德
3.基于继电反馈PID参数整定的床温控制系统 [J], 刘威
4.基于继电器反馈的自整定PID调节器设计 [J], 白迎斌
5.基于继电反馈PID自整定控制算法的环境温控系统实现 [J], 高继昆
因版权原因,仅展示原文概要,查看原文内容请购买。