直流无刷电动机及其调速控制
- 格式:doc
- 大小:297.00 KB
- 文档页数:8


无刷直流电机调速系统的控制原理下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
此文下载后可定制随意修改,请根据实际需要进行相应的调整和使用。
并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Downloaded tips: This document is carefully compiled by the editor. I hope that after you download them, they can help you solve practical problems. The documents can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!In addition, our shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!无刷直流电机调速系统是一种能够实现精准控制电机转速的技术,它在工业生产和生活中有着广泛的应用。

无刷直流电机(BLDC)双闭环调速系统在无刷直流电机双闭环调速系统中,双闭环分别是指速度闭环和电流闭环。
对于PWM 的无刷直流电机控制来说,无论是转速的变化还是由于负载的弯化引起的电枢电流的变化,可控量输出最终只有一个,那就是都必须通过改变PWM的占空比才能实现,因此其速度环和电流环必然为一个串级的系统,其中将速度环做为外环,电流环做为内环。
调节过程如下所述:由给定速度减去反馈速度得到一个转速误差,此转速误差经过PID调节器,输出一个值给电流环做给定电流,再由给定电流减去反馈电流得到一个电流误差,此电流误差经过PID 调节器,输出一个值就是占空比。
在速度环和电流环的调节过程中,PID的输出是可以作为任意量纲(即无量纲,用标幺值来表示;标幺值:英文为per unit,简写为pu,是各物理量及参数的相对单位值,是不带量纲的数值)来输入给下一环节或者执行器的,因此无需去管PID输出的量纲,只要是这个输出值反映了给定值和反馈值的差值变化,能够使这个差值无限趋近于零即可,相当于将输出值模糊化,不用去搞的太清楚,如果你要是一直在这里纠结输出值具体是个什么东西时,那么你就会瞎在这里出不来了。
假如你要控制一个参数,并且这个参数的大小和你给定量和反馈量有着直接的关系(线性关系或者一阶导数关系或者惯性关系等),那么就可以不做量纲变换。
比如速度环的PID之后的输出就可以直接定义为转矩,因为速度过慢就要提高转矩,速度过快就要减小转矩,PID输出量的意义是调整了这个输出量,就可以直接改变你要最终控制的参数,并且这个输出量你是可以直接来控制的,这种情况下PID输出的含义是你可以自己定的,比如直流电机,速度环输出你可以直接定义为转矩,也可以定义为电流,然后适当的调节PID的各个参数,最终可以落到一个你能直接控制的量上,在这里最终的控制量就是占空比的值,当占空比从0%—100%时对应要写入到寄存器里面的值为0—3750时,那么0—3750就是最终的控制量的范围。

无刷直流电机的调速与控制技术随着科技的发展,电动机在各个领域的应用越来越广泛。
而无刷直流电机作为一种高效、可靠的电机,在许多领域得到了广泛的应用。
无刷直流电机的调速与控制技术是保证电机运行稳定性和提高其性能的重要一环。
一、无刷直流电机的工作原理无刷直流电机是一种基于电磁感应原理工作的电动机。
其核心部件是电机转子上的永磁体,通过感应电流产生的磁场与定子线圈产生的磁场相互作用,从而实现电机的运转。
相比于传统的有刷直流电机,无刷直流电机省去了电刷与换向器件,因此具有更高的效率和更长的寿命。
二、无刷直流电机的调速方法无刷直流电机的调速方法主要包括电压控制调速和电流控制调速两种。
1. 电压控制调速电压控制调速是通过改变电压的大小来控制电机的转速。
在实际应用中,最常见的方式是采用PWM (Pulse Width Modulation) 调制技术。
PWM技术通过调整电压的占空比,使得电机在一个固定的周期内以不同的占空比工作,从而实现不同的转速。
这种方法简单易行,但是对于大功率的无刷直流电机,其调速范围较窄。
2. 电流控制调速电流控制调速是通过改变电机定子线圈的电流来控制电机的转速。
常见的控制方法有开环控制和闭环控制。
开环电流控制是在电机定子线圈中加回馈电阻,通过改变反馈电阻的大小来调整电流。
这种方法结构简单,控制参数易调,但是系统稳定性较差,无法适应负载的变化。
闭环电流控制是在开环控制的基础上加入反馈环节,通过传感器测量电机的电流,并与设定的电流进行比较,通过PID控制算法来调整控制器输出的电压,从而控制电机的转速。
这种方法可以提高系统的稳定性和动态响应性能,适用于对转速精度和系统稳定性要求较高的应用。
三、无刷直流电机的控制技术无刷直流电机的控制技术是实现电机调速的重要手段之一。
根据不同的应用场景和需求,可以选择不同的控制方法。
1. 速度控制速度控制是无刷直流电机最基本的控制方式。
通过改变电机的输入提速,可以控制电机的转速。

BLDC无刷直流电机控制算法
BLDC (Brushless DC) 无刷直流电机是一种在很多应用领域中广泛使
用的电机类型,它具有高效率、高可靠性和较长寿命的特点。
为了有效控
制BLDC电机,需要采用适当的控制算法来实现其速度、位置或扭矩控制。
本文将介绍几种常见的BLDC电机控制算法,包括电速算法、电流环控制
算法和磁场导向控制算法。
1. 电速算法:电速算法是最简单和常见的BLDC电机控制方法之一、
它基于测量或估算电机转子速度,并将速度信号与期望速度进行比较,然
后根据比较结果调整电机的相序。
通过适当的相序调整,可以实现对电机
速度的控制。
在电速算法中,通常使用霍尔传感器或反电动势(back EMF)方法来测量电机转子的实时速度。
2. 电流环控制算法:电流环控制算法是一种高级的BLDC电机控制方法,通过控制电流来实现对电机扭矩和速度的控制。
它基于电机的电流反
馈和期望电流之间的差异,通过调整电压来控制电机的转矩输出。
电流环
控制算法通常使用PID(Proportional-Integral-Derivative)控制器来
实现高精度的电流调节。
3.磁场导向控制磁场导向控制算法是一种高级的BLDC电机控制算法,通过测量或估算电机转子位置和速度,实现对电机的精确位置控制。
磁场
导向控制算法基于电机转子位置和速度信息,将电机的磁场定向到期望位置,并通过适当的电流控制来实现转子位置的精确控制。
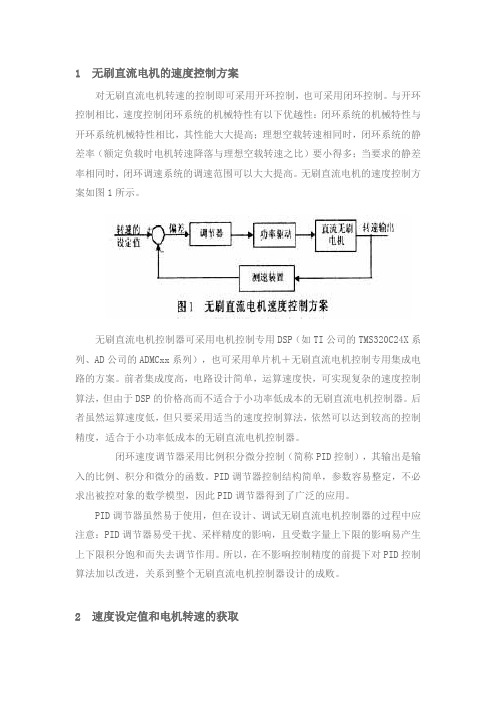
1 无刷直流电机的速度控制方案对无刷直流电机转速的控制即可采用开环控制,也可采用闭环控制。
与开环控制相比,速度控制闭环系统的机械特性有以下优越性:闭环系统的机械特性与开环系统机械特性相比,其性能大大提高;理想空载转速相同时,闭环系统的静差率(额定负载时电机转速降落与理想空载转速之比)要小得多;当要求的静差率相同时,闭环调速系统的调速范围可以大大提高。
无刷直流电机的速度控制方案如图1所示。
无刷直流电机控制器可采用电机控制专用DSP(如TI公司的TMS320C24X系列、AD公司的ADMCxx系列),也可采用单片机+无刷直流电机控制专用集成电路的方案。
前者集成度高,电路设计简单,运算速度快,可实现复杂的速度控制算法,但由于DSP的价格高而不适合于小功率低成本的无刷直流电机控制器。
后者虽然运算速度低,但只要采用适当的速度控制算法,依然可以达到较高的控制精度,适合于小功率低成本的无刷直流电机控制器。
闭环速度调节器采用比例积分微分控制(简称PID控制),其输出是输入的比例、积分和微分的函数。
PID调节器控制结构简单,参数容易整定,不必求出被控对象的数学模型,因此PID调节器得到了广泛的应用。
PID调节器虽然易于使用,但在设计、调试无刷直流电机控制器的过程中应注意:PID调节器易受干扰、采样精度的影响,且受数字量上下限的影响易产生上下限积分饱和而失去调节作用。
所以,在不影响控制精度的前提下对PID控制算法加以改进,关系到整个无刷直流电机控制器设计的成败。
2 速度设定值和电机转速的获取为在单片机中实现PID调节,需要得到电机速度设定值(通过A/D变换器)和电机的实际转速,这需要通过精心的设计才能完成。
无刷直流电机的实际转速可通过测量转子位置传感器(通常是霍尔传感器)信号得到,在电机转动过程中,通过霍尔传感器可以得到如图2所示的周期信号。
由图2可知,电机每转一圈,每一相霍尔传感器产生2个周期的方波,且其周期与电机转速成反比,因此可以利用霍尔传感器信号得到电机的实际转速。
无刷直流电机pwm调速原理
无刷直流电机(BLDC)是一种电动机,其转子上没有传统的电刷。
相比传统的有刷直流电机,BLDC电机拥有更高的效率和可靠性。
为了实现BLDC电机的调速,通常使用PWM(脉宽调制)技术。
PWM调速原理如下:在电机电源上加上一个有特定占空比的方波信号,即PWM信号。
PWM信号的占空比决定了电机的平均电压,从而决定了电机的转速。
当PWM信号的占空比增加时,电机的平均电压也会增加,电机的转速也会随之增加。
反之,当PWM信号的占空比减小时,电机的平均电压也会减小,电机的转速也会减小。
BLDC电机的控制主要包括两个方面:判断当前转子位置和根据位置控制电机。
判断转子位置通常采用霍尔传感器或反电动势感应法。
在控制电机时,可以采用开环控制或闭环控制。
开环控制指直接根据PWM信号控制电机转速;闭环控制则需要通过传感器反馈来调整PWM信号的占空比,使电机达到预期转速。
PWM调速技术不仅可以用于BLDC电机,也可以用于其他类型的电机调速。
通过合理的PWM信号设置,可以实现电机的精确调速和控制。
- 1 -。
摘要无刷直流电机是以电子换相来代替机械换相的直流电机,它保持了直流电机的优良特性,具有较好的启动和调速性能,而且它无需机械换向器,结构简单,可以从根本上克服有刷直流电机易于产生火花的弊病,因此在航天、机器人、数控机床、以及医疗器械、仪器仪表、家用电器等方面得到广泛应用。
但是,无刷直流电机运行中存在的转矩脉动问题对实现精确的位置控制和高性能的速度控制存在较大影响。
本文重点研究电机转矩调速技术及其MATLAB 仿真。
文章首先介绍了无刷直流电机的工作原理、导通方式,并通过对数学模型的分析建立了无刷直流电机的MATLAB的PID调速系统模型并调用S-函数进行了仿真,验证了模型的可行性。
关键词:无刷直流电机;转矩调速;MATLAB;PID;S-函数ABSTRACTBrushless DC motor based on electronic commutation instead of mechanical commutation of DC motor, it maintained the excellent characteristics of DC motor, and has a good performance of starting and rotate-speed adjustment, and it need not mechanical commutation, the structure is simple, can fundamentally overcome a brushed DC motor prone to spark the evils, so in space, the robot, NC machine tools, and medical equipment, instruments and meters, household appliances, etc widely used.But, brushless DC motor problems in the operation of the torque ripple of to achieve precise position control and high-performance speed control exist great influence. This paper mainly studies the brushless DC motor(BLDCM) torque speed controlling technology and its MATLAB simulation.This article first of brushless DC motor working principle, conduction mode of mathematical model, and then through the analysis of brushless DC motor established the MATLAB PID speed regulation system model and simulation, which validated the feasibility of the model.Keywords brushless DC motor(BLDCM);rotate-speed; torque speed-controlling; MATLAB; PID;S-function目录1 绪论 (1)1.1 无刷直流电机技术的发展及现状 (1)1.2 无刷直流电机的技术问题及其解决技术 (3)1.3 论文研究的主要问题 (5)2 无刷直流电机的构成及基本工作原理 (6)2.1 无刷直流电机电路的基本组成环节 (6)2.2 无刷直流电机的导通方式及基本工作原理 (7)2.3 本章小结 (10)3 无刷直流电机的数学模型 (11)3.1 无刷直流电机的数学模型及其基本关系式 (11)3.2 本章小结 (14)4 无刷直流电机的仿真模型及其验证 (15)4.1 仿真软件介绍 (15)4.2 S-函数简介及使用 (16)4.3 仿真建模及实现 (19)4.4 仿真验证及结果记录 (27)4.5 仿真结果分析 (27)4.6 本章小结 (28)结束语 (29)致谢 (30)参考文献 (31)附录 (32)1绪论1.1 无刷直流电机技术的发展及现状1.1.1无刷直流电机的发展及分类无刷直流电机已有四十余年的发展历史,最初是相对于具有机械电刷的传统的直流电机而言的。
1无刷直流电机控制器使用说明书
该控制器适用于直流12V/24V、功率200W 以下、转速30000转以内、电气相位为60°/120°的直流无刷电动机。
主要特点:
霍尔传感器解码、电子换相、适用于电气相位为60°/120°的无刷直流电机。
PWM 无级调速,调速范围为额定转速的10%-100%。
提供了开环和闭环两种速度检测方式。
控制方式:启动/停止、制动/运转、正转/反转。
保护功能:过流保护、欠压保护、短路保护、过热保护、电机堵转保护、传感器错相保护。
使用注意事项:
1、电源一定不能接反,否则会损坏电机控制器。
2、电机的各相及检测线必须和控制器正确连接,否则电机无法正常运转。
3、PR1为力度调节电位器,顺时针调节为力度增加,逆时针调节为力度减小;
PR2为速度调节电位器,顺时针调节为速度减小,逆时针调节为速度增加。
4、调节力度、速度电位器时,请用小一字螺丝刀微调多圈。
- 接直流电源正极 - 接直流电源
地 - 接电机绕组A (粗
白线)- 接电机绕组B (粗蓝线)- 接电机绕组C (
粗绿线)- 接红色线(细线) - 接黑色线(细线) - 接电机相位检测器A
(细白线) - 接电机相位检测器B (细蓝线) - 接电机相位检测器C
(细绿线
)
- 接地线(停止)、悬空(运- 未定义 - +15V 电源
- 接地线(正转
)
、
悬
空
(
反- 故障
输出-
地线
电源
指示灯 故障指示灯 - 地线- 接地线(运转)、悬空(制。
直流无刷电动机及其调速控制
1.直流无刷电动机的发展概况与应用
有刷直流电动机从19世纪40年代出现以来,以其优良的转矩控制特性,在相当长的一段时间内一直在运动控制领域占据主导地位。
但是,有机械接触电刷-换向器一直是电流电机的一个致命弱点,它降低了系统的可靠性,限制了其在很多场合中的使用。
为了取代有刷直流电动机的机械换向装置,人们进行了长期的探索。
早在1917年,Bolgior就提出了用整流管代替有刷直流电动机的机械电刷,从而诞生了无刷直流电机的基本思想。
1955年美国的等首次申请了用晶体管换相线路代替有刷直流电动机的机械电刷的专利,标志着现代无刷直流电动机的诞生。
无刷直流电动机的发展在很大程度上取决于电力电子技术的进步,在无刷直流电动机发展的早期,由于当时大功率开关器件仅处于初级发展阶段,可靠性差,价格昂贵,加上永磁材料和驱动控制技术水平的制约,使得无刷直流电动机自发明以后的一个相当长的时间内,性能都不理想,只能停留在实验室阶段,无法推广使用。
1970年以后,随着电力半导体工业的飞速发展,许多新型的全控型半导体功率器件(如GTR、MOSFET、IGBT等)相继问世,加之高磁能积永磁材料(如SmCo、NsFeB)陆续出现,这些均为无刷直流电动机广泛应用奠定了坚实的基础。
在1978年汉诺威贸易博览会上,前联邦德国的MANNESMANN公司正式推出了 MAC无刷直流电动机及其驱动器,引起了世界各国的关注,随即在国际上掀起了研制和生产无刷直流系统的热潮,这业标志着无刷直流电动机走向实用阶段。
随着现代永磁材料和相关电子元器件的性能不断提高,价格不断下降,无刷电动机的到了快速发展,并被广泛应用于各个领域,例如,在数控机床、工业机器人以及医疗器械、仪器仪表、化工、轻纺机械和家用电器等小功率场合,计算机的硬盘驱动和软盘驱动器器中的主轴电动机、录像机中的伺服电动机等。
2.直流无刷电动机的基本结构和工作原理
直流无刷电动机的结构
直流无刷电动机的结构
示意图如图2-1所示。
无刷直流电动机由它是
由电动机本体、位置检测器、
逆变器和控制器组成。
无刷
直流电动机最初的设计思想
来自普通的有刷直流电动
机,不同的是将直流电动机
图2-1 无刷直流电机机构示意图
的定子、转子位置进行了互
换,其转子为永磁结构,产生气隙磁通;定子为电枢,有多相对称绕组。
原直流电
动机的电刷和机械换向器被逆变器和转子位置检测器所代替。
所以无刷直流电动机的电机本体实际上是一种永磁同步电机。
由于无刷直流电动机的电机本体为永磁电机,所以无刷直流电动机也称为永磁无刷直流电动机。
目前,无刷直流电动机的逆变器主开关一般采用IGBT或功率MOSFET等全控型器件,有些主电路已有集成的功率模块(PIC)和智能功率模块(IPM),选用这些模块可以提高系统的可靠性。
位置检测器的作用是检测转子磁极相对与定子绕组的位置信号,为逆变器提供正确的换相信息。
位置检测包括有位置传感器和无位置传感器检测两种方式。
控制器是无刷直流电动机正常运行并实现各种调速伺服功能的指挥中心,主要用于实现电机的正反转及停车控制、电机开环调速以及实现短路、过流、过电压和欠电压等故障保护电路。
直流无刷电动机的工作原理
普通直流电动机的电枢在转子上,而定子产生固定不动的磁场。
为了使直流电动机旋转,需要通过换向器和电刷不断的改变电枢绕组中电流的方向,使两个
磁场的方向始终保持相互垂直,从而产生恒定的转矩驱动电动机不断旋转。
无刷直流机为了去掉电刷,将电枢放到定子上去,而转子做成永磁体,这样的结构正好与普通电动机相反。
然而即使这样改变还不够,因为定子上的电枢通入直流电以后,只能产生不变的磁场电动机依然转不起来。
为了使电动机的转子转起来,必须使定子电枢各相绕组不断地换相通电,这样才能使定子磁场随着转子的位置不断地变化,使定子磁场与转子永磁磁场始终保持90o左右的空间角,产生转矩推动转子旋转。
在换相的过程中,定子各项绕组在工作气隙中所形成的旋转磁场是跳跃式运动。
这种旋转磁场在一周有三种状态,每种状态持续120o。
它们跟踪转子,并与转子的磁场相互作用,能够产生推动转子继续转动的转矩。
下面以三相定子绕组接成星形为例说明其驱动原理。
图2-2为无刷直流电动机
图2-2 无刷直流电动机组成原理图
组成原理图。
驱动电路开关管的控制原理可用图2-3加以说明。
(图中假设转子只有一对磁极,定子绕组A、B、C三相对称,按每极每相60o相带分布)。
(a)A相正向通电,B相反向通电(b)转过60o
(c)继续旋转(d)A相正向通电,C相反向通电转过60o
(e)B相正向通电,C相反向通电(f)转过60o
(g )B 相正向通电,A 相反向通电 (h )转过60o
图2-3 无刷直流机转子位置与换相的关系
假设当转子处于图2-3(a )位置时为0o ,相带A ′、B 、C ′在N 级下,相带A 、B'、C 在S 级下,这时A 相正向通电,B 相反向通电,C 相不通电,各相通电波形见图1-3,产生的定子磁场与转子磁场相互作用,使转子逆时针恒速转动。
当转过60o 角后,转子位置如图(b )所示。
这时如果转子继续转下去就进入图(c )所示的位置,这样就会使同一磁极下的电枢绕组中有部分导体的电流方向不一致,它们互相抵消,削弱磁场,使电磁转矩减小。
因此,为了避免出现这样的结果,当转子转到图(b )的位置时,就必须换相,使B 相断电,C 相反相通电。
转子继续旋转,转过60o 角后到图(d )所示位置。
根据上面讲的道理必须要进行换相,即A 相断电,B 相正相通电,(e )所示。
转子再转过60o 角,如图(f )所示位置,再进行换相,使C 相断电,A 相反向通电,如图(g )所示。
这样如此下去,转子每转过60o
角就换相一次,相电流按图所示的顺序进行断电和通电,电动机就会平稳地旋转下去。
3.直流无刷电动机的的运行特性和及基于DSP 控制器调速原理
设转子永久磁铁所产生的磁场在电动机气隙中是按正弦分布,转子转角为θ时,θsin m B B =。
当定子绕组某相通过直流电流时,电动机产生的转矩为:
θsin rI LB Z T m D a = (1)
式中,D Z 为相导体数;
L 为导体的有效长度; m B 为气隙磁通最大值; r 为气隙半径; I 为定子绕组相电流。
无刷直流机的电压平衡方程式为:
IR E U U a +=∆- ................................................(2) n K E e a = .....................................................................(3) I K T T a = (4)
则可写出机械特性方程式为:
n n T K K R
K U U n a T
e e ∆-=-∆-=
0)(……………………………(5) 式中,n 为电动机转速,min /r ; U 为直流电源电压,V ; U ∆为功率晶体管压降,V ; a T 为电动机转矩平均值,M N •; R 为电动机内阻,Ω;
e K 、T K 分别为电势系数、转矩系数。
和直流电动机一样,当U 变化时即改变0n ,电动机可以进行无级调速。
但实际的无刷直流机调速系统是由电子换向线路和转子位置检测器代替传统直流电动机的机械换向装置而组成的,把检测到的端电压信号送到DSP ,计算出电动机的转速,再与给定的转速比较,输出PWM 信号,控制开关管的通断,从而控制电动机电流(电压)大小,是电动机的转速变化。
其调速原理是通过电子开关把交变的方波电流送入定子绕组,由开关频率的变化引起电动机转速的变化。
其控制系
统原理框图如图3-1。
图 3-1 系统控制框图
4.直流无刷电动机及其调速系统的特点
(1)稀土永磁方波同步电动机通入逆变器供给的、与电动势同相的120°方波电流,就组成了无刷直流电动机。
它比正弦波电动机出力大,且理论上无电磁转矩脉动现象。
(2)无刷直流电动机调速原理和一般直流电动机相同,组成的调速系统类似,并且可以借鉴传统伺服系统的设计经验,因此,容易被人们接受和普及,更适合我国的国情。
(3)无刷直流电动机比正弦波永磁电动机控制简单,逆变器产生方波比正弦波容易,转子只需要带A、B、C三个敏感元件的磁极位置检测器即可,因此大大降低了其控制系统的成本。
(4)实验证明,由无刷直流电动机组成的伺服系统,具有转矩平滑、响应快、控制精度高的特点,故适用于数控机床及机器人等伺服驱动,以及对动、静态性能要求较高的电力拖动领域。