STM32 Uart串口中断响应、发送接收详细程序
- 格式:doc
- 大小:24.00 KB
- 文档页数:4
stm32串⼝通信死在接收中断中的解决⽅法现象: 使⽤stm32f0xx系列的芯⽚,串⼝1使⽤接收中断时,当接收到⼀个数据时死在串⼝中断中,发⽣了串⼝中断溢出。
原因解释:在使⽤⼀个串⼝发数据的传感器过程中,发现程序第⼀次进⼊串⼝中断之后不再执⾏主函数的内容,中断中的内容也不执⾏。
查询⼤量资料后发现:串⼝在接收数据过多时,会出现串⼝溢出错误,并进⼊溢出中断(ORE中断)。
接下来是错误产⽣原因以及解决⽅法。
(1)什么是ORE中断?为什么会产⽣?产⽣原因如上所述。
ORE标志位在USART_SR寄存器,但值得注意的是,当我们打开串⼝接收中断时,同时也就打开了ORE中断。
(2)如何解决?看了上⾯的资料之后,我知道程序是死在了串⼝溢出中断。
处理中断时,我⾸先想到的是清除这个中断标志位,但是遇到了很多⿇烦。
解决⽅法: void USART1_IRQHandler(void){ /* 加⼊清除标志位,否则会卡死在串⼝中断服务函数中 */ uint8_t ucTemp; if(USART_GetITStatus(DEBUG_USARTx,USART_IT_RXNE)!=RESET) //检查 USART 是否发⽣中断 { USART_ClearITPendingBit(DEBUG_USARTx,USART_IT_RXNE); // 清中断标志 ucTemp=USART_ReceiveData(DEBUG_USARTx); } if(USART_GetFlagStatus(DEBUG_USARTx,USART_FLAG_ORE) == SET) // 检查 ORE 标志 { USART_ClearFlag(DEBUG_USARTx,USART_FLAG_ORE); USART_ReceiveData(DEBUG_USARTx); }}。
STM32UART详细使用说明整理1.引脚和时钟配置:首先,需要配置UART的引脚和时钟。
在STM32的引脚复用配置中选择UART功能,并配置GPIO的工作模式和引脚配置,使其与UART通信引脚相对应。
然后,配置UART的时钟源和时钟分频系数。
时钟源可以选择为系统时钟或外部时钟源。
2.初始化和配置:使用STM32提供的库函数,初始化UART控制寄存器。
配置波特率、数据位数、停止位数、奇偶校验位以及流控制等参数。
可以使用HAL库函数来完成配置,例如:```c/*初始化UART控制寄存器*/UART_HandleTypeDef huart;huart.Instance = USARTx;huart.Init.WordLength = UART_WORDLENGTH_8B;huart.Init.StopBits = UART_STOPBITS_1;huart.Init.Parity = UART_PARITY_NONE;huart.Init.Mode = UART_MODE_TX_RX;huart.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart.Init.OverSampling = UART_OVERSAMPLING_16;HAL_UART_Init(&huart);```3.数据发送:使用HAL库函数发送数据。
可以选择使用轮询方式还是中断方式发送数据。
轮询方式:```cuint8_t data[] = "Hello, World!";HAL_UART_Transmit(&huart, data, sizeof(data), HAL_MAX_DELAY);```中断方式:```cuint8_t data[] = "Hello, World!";HAL_UART_Transmit_IT(&huart, data, sizeof(data));```需要在发送数据之前开启UART的发送中断,并处理发送完成中断回调函数。
stm32HAL库串⼝⽆法接收数据的问题最近在测试串⼝收发的时候,发现串⼝会出现⽆法接收数据的情况,后来在⽹上查找资料,发现是库的问题发送⽤的HAL_UART_Transmit,接收数据使⽤的是中断⽅式 HAL_UART_Receive_ITHAL_UART_Transmit在发送的过程中,如果这时候来了接收中断,就有可能会出现挂掉的情况了,为什么呢?来看⼀下 HAL_UART_Transmit函数内部实现HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout){uint8_t *pdata8bits;uint16_t *pdata16bits;uint32_t tickstart = 0U;/* Check that a Tx process is not already ongoing */if (huart->gState == HAL_UART_STATE_READY){if ((pData == NULL) || (Size == 0U)){return HAL_ERROR;}/* Process Locked */__HAL_LOCK(huart);huart->ErrorCode = HAL_UART_ERROR_NONE;huart->gState = HAL_UART_STATE_BUSY_TX;/* Init tickstart for timeout management */tickstart = HAL_GetTick();huart->TxXferSize = Size;huart->TxXferCount = Size;/* In case of 9bits/No Parity transfer, pData needs to be handled as a uint16_t pointer */if ((huart->Init.WordLength == UART_WORDLENGTH_9B) && (huart->Init.Parity == UART_PARITY_NONE)){pdata8bits = NULL;pdata16bits = (uint16_t *) pData;}else{pdata8bits = pData;pdata16bits = NULL;}/* Process Unlocked */__HAL_UNLOCK(huart);while (huart->TxXferCount > 0U){if (UART_WaitOnFlagUntilTimeout(huart, UART_FLAG_TXE, RESET, tickstart, Timeout) != HAL_OK){return HAL_TIMEOUT;}if (pdata8bits == NULL){huart->Instance->DR = (uint16_t)(*pdata16bits & 0x01FFU);pdata16bits++;}else{huart->Instance->DR = (uint8_t)(*pdata8bits & 0xFFU);pdata8bits++;}huart->TxXferCount--;}if (UART_WaitOnFlagUntilTimeout(huart, UART_FLAG_TC, RESET, tickstart, Timeout) != HAL_OK){return HAL_TIMEOUT;}/* At end of Tx process, restore huart->gState to Ready */huart->gState = HAL_UART_STATE_READY;return HAL_OK;}else{return HAL_BUSY;}}我们注意到 __HAL_LOCK(huart); 函数,这是对串⼝资源的上锁,然后调⽤__HAL_UNLOCK(huart);进⾏解锁再跟踪⼀下 __HAL_LOCK函数,这是⼀个宏定义#if (USE_RTOS == 1U)/* Reserved for future use */#error "USE_RTOS should be 0 in the current HAL release"#else#define __HAL_LOCK(__HANDLE__) \do{ \if((__HANDLE__)->Lock == HAL_LOCKED) \{ \return HAL_BUSY; \} \else \{ \(__HANDLE__)->Lock = HAL_LOCKED; \} \}while (0U)#define __HAL_UNLOCK(__HANDLE__) \do{ \(__HANDLE__)->Lock = HAL_UNLOCKED; \}while (0U)#endif /* USE_RTOS */这⾥,如果资源已上锁,调⽤ __HAL_LOCK 会直接返回 HAL_BUSY,这很关键。
stm32多任务多数据串口接收及处理方法STM32多任务多数据串口接收及处理方法通常涉及到使用中断服务程序(ISR)或轮询方法来接收串口数据,并在多个任务之间分配和同步处理这些数据。
以下是一个基本的步骤和策略,用于实现这一功能:1. 初始化串口:首先,你需要初始化串口以进行通信。
这包括设置波特率、数据位、停止位、奇偶校验等。
2. 配置中断:STM32的串口通常具有一个接收中断。
你可以配置这个中断,以便每当一个新的字节被接收时,它就会触发一个中断。
3. 中断服务程序(ISR):在中断服务程序中,你可以读取接收缓冲区中的数据,并将其放入一个全局变量或数据结构中,以便其他任务或函数可以访问它。
4. 多任务处理:你可以使用一个任务或一组任务来处理这些串口数据。
这可能涉及到解析数据、执行某些操作或将数据发送到其他设备。
5. 数据同步:在多任务环境中,你需要确保数据的同步。
这意味着,当一个任务正在处理数据时,其他任务不能同时访问或修改这些数据。
这通常通过使用互斥锁、条件变量或其他同步机制来实现。
6. 轮询:除了使用中断,你还可以使用轮询方法来检查串口是否有数据可供读取。
这种方法可能在某些应用中更简单,但可能不如中断方法效率高。
7. 错误处理:不要忘记在代码中包含错误处理逻辑。
这可能包括检查读取的数据是否完整、是否有任何传输错误等。
8. 优化:对于高性能应用,你可能还需要考虑其他优化策略,如非阻塞读取、缓冲区管理、流量控制等。
以上只是一个基本的框架,具体的实现细节将取决于你的具体需求和STM32的具体型号。
建议查阅STM32的参考手册和相关文档以获取更详细的信息和示例代码。
串口中断接收数据流程串口(UART)中断接收数据是一个异步的过程,涉及一系列离散事件。
它允许微控制器在不连续地轮询串口状态的情况下接收串行数据。
1. 数据帧接收传输器将数据帧以串行比特流的形式发送到接收器。
数据帧由一个起始位、一个或多个数据位、一个奇偶校验位和一个停止位组成。
2. 起始位检测微控制器检测到串口线上电平从高转低,这表示起始位的开始。
3. 数据位接收微控制器在每个时钟周期采样串口线并读取数据位。
数据位数取决于串口配置,通常为 5、6、7 或 8 位。
4. 奇偶校验(可选)如果启用奇偶校验,微控制器会检查接收到的数据位的奇偶性和期望的奇偶性是否匹配。
5. 停止位检测接收器检测到串口线上电平从低转高,这表示停止位的开始。
6. 中断触发当接收到一个完整的帧时,微控制器会触发一个中断。
7. 中断服务程序(ISR)ISR负责读取接收到的数据帧并将其存储在缓冲区中。
ISR还可能会重置一些标志位,如数据溢出标志位,以确保正确接收后续数据帧。
影响因素串口中断接收数据流程的效率和可靠性受以下因素影响:波特率:波特率越低,接收数据所需的时间就越长。
数据位数:数据位数越多,每个帧的传输时间就越长。
奇偶校验:奇偶校验增加了额外的开销,但可以提高数据的可靠性。
中断响应时间:中断响应时间应足够快,以免丢失数据。
优化策略为了优化串口中断接收数据流程,可以采用以下策略:使用合适的波特率和数据位数:选择最能满足特定应用需求的波特率和数据位数。
仅在需要时启用奇偶校验:奇偶校验提供了可靠性,但增加了开销。
优化ISR:确保ISR高效且快速,以避免丢失数据。
使用正确的中断优先级:赋予串口接收中断一个适当的优先级,以确保它在需要时得到正确处理。
stm32 hal库串口中断接收函数在STM32开发中,使用串口通信是很常见的一种方式。
而在使用STM32 HAL库进行开发时,我们可以方便地使用HAL库提供的接口来进行串口通信。
其中,使用串口中断接收数据可以提高数据的实时性和稳定性,因此本文将介绍STM32 HAL库中串口中断接收函数的使用方法。
1. 串口中断接收函数的定义首先,我们需要了解一下STM32 HAL库中串口中断接收函数的定义。
在HAL库中,串口中断接收函数的定义如下:void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) 该函数是由HAL库提供的一个回调函数,即当串口接收到数据后,会自动调用该函数。
其中,参数huart是串口句柄,用于标识当前是哪个串口接收到了数据。
2. 串口中断接收函数的使用方法在使用串口中断接收函数时,我们需要按照以下步骤进行操作:(1)使能串口中断在使用串口中断接收函数之前,我们需要先使能串口中断。
具体地,可以使用HAL库提供的函数HAL_UART_Receive_IT()来使能串口中断,代码如下:HAL_UART_Receive_IT(&huart1, uart1_rx_data, 1);其中,第一个参数是串口句柄,第二个参数是接收缓存区,第三个参数是接收数据的长度。
(2)编写串口中断接收函数接下来,我们需要编写串口中断接收函数。
在该函数中,我们可以对接收到的数据进行处理。
例如,将接收到的数据存储到一个全局变量中,代码如下:void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) {if(huart == &huart1){uart1_rx_buf[uart1_rx_len++] = uart1_rx_data[0];}}在该函数中,我们首先通过判断huart参数来确定是哪个串口接收到了数据,然后将接收到的数据存储到全局变量uart1_rx_buf中,并将接收数据的长度uart1_rx_len自增1。
STM32 HAL库USART中断接收不定长数据——空闲中断法STM32cubeMX软件配置好串口中断,导出工程并打开,定义串口接收缓冲区和接收长度的全局变量:uint8_t RX_data[1000];uint16_t RX_len;在main函数的初始化中开启IDLE中断并首次打开中断接收函数://开启IDLE中断__HAL_UART_ENABLE_IT(&huart1, UART_IT_IDLE);//中断接收函数,这里设置最大接收长度为1000HAL_UART_Receive_IT(&huart1, (uint8_t*)RX_data, 1000);添加IDLE中断处理函数:void UsartReceive_IDLE(UART_HandleTypeDef *huart){__HAL_UART_CLEAR_IT(&huart1,UART_CLEAR_IDLEF); //清除中断RX_len = 1000 - huart1.RxXferCount; //计算接收数据长度HAL_UART_AbortReceive_IT(huart); //终止接收// 用户数据处理,如将接收到的内容重新发送// HAL_UART_Transmit_IT(&huart1, (uint8_t*)RX_data, RX_len);HAL_UART_Receive_IT(&huart1, (uint8_t*)RX_data, 1000); //接收完数据后再次打开中断接收函数}打开stm32fXxx_it.c文件(X视具体芯片系列),在USART1_IRQHandler()函数中添加IDLE中断服务:if(__HAL_UART_GET_IT(&huart1,UART_IT_IDLE) != RESET) //判断是否为IDLE中断{UsartReceive_IDLE(&huart1); //调用IDLE中断处理函数}。
stm32hal库串口中断接收函数STM32 HAL库提供了一种简单可靠的方式实现串口通信,其中使用中断接收函数自动接收字节流数据。
串口接收中断函数需要在初始化时开启,同时设置串口中断接收缓冲区大小,并在主程序中调用相关的中断处理函数。
中断接收函数的基本原理是:每当收到一个字节时,串口硬件会触发一个中断,并将接收到的字节存入中断接收缓冲区。
当有数据到达时,中断接收处理器会检测是否有可用的数据,并将数据读取到应用程序中。
以下是STM32 HAL库串口中断接收函数的代码示例:```c/* 串口中断接收处理函数 */void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) {/* 判断是否发生串口中断 */if (huart->Instance == USARTx) {/* 读取缓冲区中的字节 */rx_buffer[rx_index] = (uint8_t)(huart->Instance->RDR &0xFF);/* 增加接收缓存区的索引 */rx_index++;/* 如果接收数据超过了缓存区大小,则清除缓存区 */if (rx_index == BUFFER_SIZE) {rx_index = 0;}/* 开始下一次中断接收 */HAL_UART_Receive_IT(huart, &rx_buffer[rx_index], 1);}}```在主程序中,我们需要开启串口中断接收并设置接收缓冲区大小:```c/* 开启串口中断接收 */HAL_UART_Receive_IT(&huart1, &rx_buffer[rx_index], 1);/* 设置接收缓冲区大小 */#define BUFFER_SIZE 1024uint8_t rx_buffer[BUFFER_SIZE];uint16_t rx_index = 0;```这样,在主程序中循环读取缓冲区的数据即可。
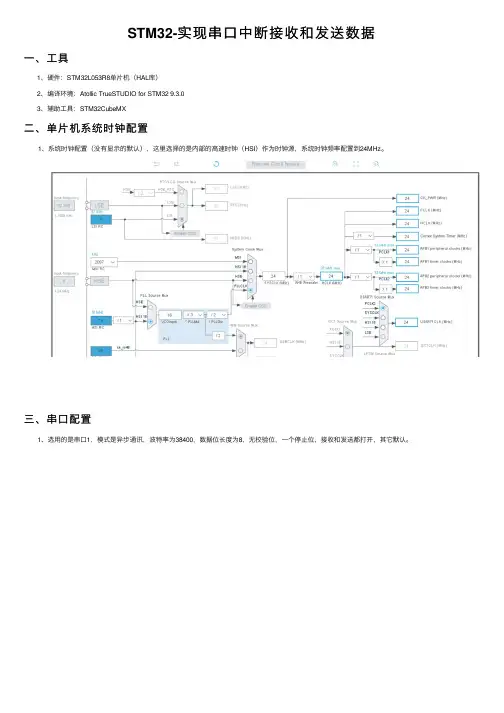
STM32-实现串⼝中断接收和发送数据⼀、⼯具 1、硬件:STM32L053R8单⽚机(HAL库) 2、编译环境:Atollic TrueSTUDIO for STM32 9.3.0 3、辅助⼯具:STM32CubeMX⼆、单⽚机系统时钟配置 1、系统时钟配置(没有显⽰的默认),这⾥选择的是内部的⾼速时钟(HSI)作为时钟源,系统时钟频率配置到24MHz。
三、串⼝配置 1、选⽤的是串⼝1,模式是异步通讯,波特率为38400,数据位长度为8,⽆校验位,⼀个停⽌位,接收和发送都打开,其它默认。
2、使能串⼝中断四、⽣成⼯程并进⾏完善 1、⼯程⽣成设置 2、完善代码 在配置完串⼝后,要以中断的⽅式接收数据,后⾯新增的接收⼀个字节数据函数主要是为了打开串⼝中断并等待有数据发来,剩下的字节由中断的回调函数控制接收。
/*** @brief USART1 Initialization Function* @param None* @retval None*/static void MX_USART1_UART_Init(void){/* USER CODE BEGIN USART1_Init 0 *//* USER CODE END USART1_Init 0 *//* USER CODE BEGIN USART1_Init 1 *//* USER CODE END USART1_Init 1 */huart1.Instance = USART1;huart1.Init.BaudRate = 38400 ;huart1.Init.WordLength = UART_WORDLENGTH_8B;huart1.Init.StopBits = UART_STOPBITS_1;huart1.Init.Parity = UART_PARITY_NONE;huart1.Init.Mode = UART_MODE_TX_RX;huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart1.Init.OverSampling = UART_OVERSAMPLING_16;huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;if (HAL_UART_Init(&huart1) != HAL_OK){Error_Handler();}/* USER CODE BEGIN USART1_Init 2 */HAL_UART_Receive_IT(&huart1, &r_data, 1);/* USER CODE END USART1_Init 2 */} 当有数据发来,会响应中断接收数据,接收完后会关闭中断然后调⽤⼀个回调函数,如果想接收多个数据,就需要在回调函数中重新开启接收中断,回调函数的内容可以由⽤户⾃⼰添加(该函数名为固定写法不能随意更改)。
stm32串口中断原理
STM32串口中断是指在串口收发数据时,通过中断方式进行
数据的处理和传输。
在STM32单片机中,串口通信是通过UART或USART模块实现的。
UART(Universal Asynchronous Receiver/Transmitter)是一种
通用异步收发器,主要用于串行通信。
USART(Universal Synchronous/Asynchronous Receiver/Transmitter)是一个更加
通用且功能更强大的串行通信接口,可同时支持异步和同步通信。
在STM32中,串口通信一般使用USART模块。
通过配置USART的寄存器,设置波特率、数据位、停止位、校验位等
参数。
然后,通过使能USART接收中断和发送中断,可以实
现接收和发送数据时的中断处理。
当有新的数据要发送时,CPU会将数据写入USART的发送缓冲区,并启动发送操作。
当发送操作完成后,USART会触发
发送完成中断,通知CPU可以继续发送下一个数据。
当收到新的数据时,USART会将数据存入接收缓冲区,并触
发接收完成中断,通知CPU可以读取接收到的数据。
在中断服务函数中,我们可以根据需要处理发送和接收的数据。
比如,可以通过发送中断函数来发送下一个数据,或者在接收中断函数中进行数据的处理和分析。
总的来说,STM32串口中断通过配置USART的相关寄存器和使能中断,实现了在数据收发过程中的中断处理。
这种方式可以提高效率和可靠性,使程序可以及时响应串口数据的变化。
STM32单片机UART发送配置的步骤及方法STM32单片机UART发送配置的步骤及方法字符发送的过程描述:在UART的发送过程中先将数据输入到发送数据寄存器中(TDR)此时(TXE)被硬件置1,之后TDR寄存器将数据串行移入到发送移位寄存器中,将数据在TX端口发送,此时(TC)被硬件置1。
发送与接收是逆过程。
UART发送配置步骤:1.通过USART_CR1寄存器上置位UE来激活USART。
2.编程USART_CR1的M位来定义字长。
3.在USART_CR2中编程停止位的位数。
4.如果采用多缓冲器通信,配置USART_CR3中的DMA使能位(DMAT)。
按多缓冲器通信中的描述配置DMA寄存器。
5.利用USART_BRR寄存器选择要求的波特率。
6. 设置USART_CR1中的TE位,发送一个空闲帧作为第一次数据发送。
7. 把要发送的数据写进USART_DR寄存器(此动作清除TXE位)。
在只有一个缓冲器的情况下,对每个待发送的数据重复步骤7。
8. 在USART_DR寄存器中写入最后一个数据字后,要等待TC=1,它表示最后一个数据帧的传输结束。
当需要关闭USART或需要进入停机模式之前,需要确认传输结束,避免破坏最后一次传输。
在配置USART的接收时,除上面的步骤外,还要使能接收中断并且配置中断向量控制器NVIC。
波特率的计算方法:USART的编程:1.定义USART_InitTypeDef类型的结构体UART_init2.使能GPIO的时钟和USART的时钟。
(UART1 PA9为TX,PA9为RX)3.配置UART_init结构体的各参数。
配置波特率、数据位、停止位、奇偶效验位、硬件流、。
stm32f4串口中断写法今天咱们来聊一聊stm32f4的串口中断写法呀。
想象一下,stm32f4就像是一个超级智能的小机器人,它可以做很多很多有趣的事情呢。
串口就像是这个小机器人的嘴巴和耳朵,它可以通过这个“嘴巴和耳朵”和其他的设备聊天哦。
而中断呢,就像是这个小机器人突然听到了很重要的事情,然后马上放下手里正在做的其他小事情,先去处理这个重要的事情。
那怎么让这个小机器人学会在串口有事情发生的时候马上做出反应呢?这就需要我们来写一写串口中断的程序啦。
比如说,我们可以把这个过程想象成在学校里。
你正在教室里安安静静地做数学作业呢,这就好比stm32f4在做其他的正常任务。
突然,老师叫你的名字,这就像是串口有了新的消息,也就是发生了中断。
你就得停下手里的数学作业,先去听老师说话,这就是中断处理。
我们先得让这个小机器人知道串口在哪里呀。
就像你在学校里要先知道老师的办公室在哪里一样。
我们要在程序里告诉stm32f4哪个是串口,就像告诉它这是和外面交流的通道。
然后呢,我们要设置这个串口的一些基本的东西。
比如说,就像你要和朋友写信,你得先确定用什么信纸,字写多大。
对于串口来说,我们要确定它的波特率,这就像是写信的时候字的大小和疏密程度呢。
如果波特率设置错了,就好像你朋友看你的信的时候,字要么太大太稀疏,要么太小太密集,根本看不清楚你写的啥。
接着,我们要让这个小机器人知道怎么去处理串口的中断。
这就好比你要告诉自己,当老师在课堂上叫你的名字的时候,你要站起来,有礼貌地听老师讲话。
在程序里,我们要写好当串口有新消息来了,这个小机器人要做什么。
比如说,它可能是把收到的消息显示在一个小屏幕上,就像你把老师说的重要事情记在小本子上一样。
我给你们举个具体的小例子吧。
假如我们要让stm32f4接收从电脑发过来的数字,然后把这个数字加1再发回电脑。
我们先设置好串口,让它能正常接收和发送消息。
当电脑发过来一个数字,比如说3,这时候串口就像一个小邮递员一样把这个消息送到了stm32f4这个小机器人那里。
STM32使用DMA加串口空闲中断接收数据在STM32中使用DMA和串口空闲中断接收数据可以实现高效的数据接收。
下面是一个示例代码,可以在1200字以上使用DMA和空闲中断接收数据。
首先,需要启用STM32的串口空闲中断和DMA功能。
在CubeMX中配置相关的引脚和串口设置,并使能空闲中断和DMA接收。
接下来是代码实现:```c#include "stm32f4xx_hal.h"#define UART_RX_BUFFER_SIZE 2048 // 接收缓冲区大小UART_HandleTypeDef huart2;DMA_HandleTypeDef hdma_usart2_rx;uint8_t uart_rx_buffer[UART_RX_BUFFER_SIZE];uint16_t uart_rx_index = 0;```上面的代码定义了串口接收的缓冲区和相关的变量。
```cvoid HAL_UART_IdleCallback(UART_HandleTypeDef *huart)if (huart->Instance == USART2)//空闲中断发生HAL_UART_DMAStop(&huart2);}```这是串口空闲中断回调函数,当串口空闲中断发生时,将设置一个标志表示接收完成,并停止DMA接收。
```cvoid HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)if (huart->Instance == USART2)//DMA接收完成uart_rx_index += UART_RX_BUFFER_SIZE -hdma_usart2_rx.Instance->CNDTR;if (uart_rx_index >= UART_RX_BUFFER_SIZE)//接收缓冲区满了,重置索引uart_rx_index = 0;}HAL_UART_Receive_DMA(&huart2, uart_rx_buffer,UART_RX_BUFFER_SIZE);}```这是DMA接收完成回调函数,当DMA接收完成时,更新接收缓冲区索引,并重新启动DMA接收。
STM32串⼝接收流程-串⼝接收中断串⼝接收串⼝接收流程1. 编程USARTx_CR1的M位来定义字长。
2. 编程USARTx_CR2的STOP位来定义停⽌位位数。
3. 编程USARTx_BRR寄存器确定波特率。
4. 使能USARTx_CR1的UE位使能USARTx。
5. 如果进⾏多缓冲通信,配置USARTx_CR3的DMA使能(DMAT)。
6. 使能USARTx_CR1的RE位为1使能接收器。
7. 如果要使能接收中断(接收到数据后产⽣中断),使能USARTx_CR1的RXNEIE位为1。
当串⼝接收到数据时1. USARTx_SR(ISR)的RXNE位置1。
表明移位寄存器内容已经传输到RDR(DR)寄存器。
已经接收到数据并且等待读取。
2. 如果开启了接收数据中断(USARTx_CR1寄存器的RXNEIE位为1),则会产⽣中断。
(程序上会执⾏中断服务函数)3. 如果开启了其他中断(帧错误等),相应标志位会置1。
4. 读取USARTx_RDR(DR)寄存器的值,该操作会⾃动将RXNE位清零,等待下次接收后置位。
串⼝接收流程(HAL库)配置过程:接收配置步骤①~⑥和发送流程⼀样,调⽤HAL_UART_Init函数HAL_StatusTypeDef HAL_UART_Init(UART_HandleTypeDef *huart);步骤⑦开启接收中断:HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef*huart, uint8_t *pData, uint16_t Size);接收数据过程:步骤①获取状态标志位通过标识符实现:__HAL_UART_GET_FLAG //判断状态标志位__HAL_UART_GET_IT_SOURCE //判断中断标志位步骤②~③中断服务函数:void USARTx_IRQHandler(void) ;//(x=1~3,6)void UARTx_IRQHandler(void) ;//(x=4,5,7,8)在启动⽂件startup_stm32fxxx.s中查找。
程序实现功能:可以直接接收USART1的数据,并通过串口调试输出显示#include"stm32f10x_lib.h"void NVIC_Configuration(void);void RCC_Configuration(void);void GPIO_Configuration(void);ErrorStatus HSEStartUpStatus;USART_InitTypeDef USART_InitStructure;USART_ClockInitTypeDef USART_ClockInitStructure;int main(){#ifdef DEBUGdebug#endifRCC_Configuration();NVIC_Configuration();GPIO_Configuration();/*串口传输速率的大小必须与RCC所设定的时钟相对应起来*/USART_ART_BaudRate = 9600; //设置USART的传输速率/*设定数据的接收发送模式*/USART_ART_WordLength = USART_WordLength_8b;//在一帧中传输或接受8位数据位USART_ART_StopBits = USART_StopBits_1; //定义在帧的结尾传输一个停止位USART_ART_Parity = USART_Parity_No; //奇偶失能USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None; //指定硬件流控制模式RTS和CTS使能USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx; //指定使能或失能发送和接受模式Tx发送使能和Rx接收使能USART_Clock ART_Clock = USART_Clock_Disable; //提升USART时钟时使能还是失能,钟低电平活动USART_ART_CPOL = USART_CPOL_Low; //指定SLCK引脚上时钟的极性USART_ART_CPHA = USART_CPHA_2Edge; //时钟第二个边缘进行数据捕获USART_ART_LastBit = USART_LastBit_Disable; //在SCLK引脚上输出最后发送的那个数据字的脉冲不从SCLK输出USART_ClockInit(USART1, &USART_ClockInitStructure);USART_Init(USART1, &USART_InitStructure);/*输入输出的中断使能*/// USART_ITConfig(USART1, USART_IT_TXE, ENABLE);USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);USART_Cmd(USART1, ENABLE); //启动串口使能USART1外设while(1){}/*USART_SendData(USART1, 0X26); //发送数据while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET){}//等待发送结束*/}void NVIC_Configuration(void){NVIC_InitTypeDef NVIC_InitStructure;#ifdef VETB_TAB_RAMNVYC_SetVectorTable(NVIC_VectTab_RAM,0x0);#elseNVIC_SetVectorTable(NVIC_VectTab_FLASH, 0x0);#endif/* Enable the USART1 Interrupt */NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQChannel; //通道设置为串口1中断(故后面应选择在“void USART1_IRQHandler(void)”开中断)NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //中断占先等级0NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //中断响应优先级0 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //打开中断NVIC_Init(&NVIC_InitStructure);}void RCC_Configuration(void){RCC_DeInit();RCC_HSEConfig(RCC_HSE_ON);HSEStartUpStatus=RCC_WaitForHSEStartUp();if(HSEStartUpStatus==SUCCESS){FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);FLASH_SetLatency(FLASH_Latency_2);RCC_HCLKConfig(RCC_SYSCLK_Div1);RCC_PCLK2Config(RCC_HCLK_Div1); //串口波特率的确定RCC_PCLK1Config(RCC_HCLK_Div2);RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);RCC_PLLCmd(ENABLE);while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY==RESET)) {}RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);while(RCC_GetSYSCLKSource()!=0x08){}}RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOE|RCC_APB 2Periph_USART1, ENABLE); //RCC中打开相应的串口}void GPIO_Configuration(void){GPIO_InitTypeDef GPIO_InitStructure;// GPIO_PinRemapConfig(GPIO_Remap_USART1, ENABLE); //改变指定管脚脚的映射Changes the mapping of the specified pin/* Configure USART1 RTS (PA12) and USART1 Tx (PA9) as alternate function push-pull 根据资料可查得各管脚对应*/GPIO_InitStructure.GPIO_Pin =GPIO_Pin_9;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //推挽输出GPIO_Init(GPIOA, &GPIO_InitStructure);/* Configure USART2 CTS (PA11) and USART1 Rx (PA10) as input floating */GPIO_InitStructure.GPIO_Pin =GPIO_Pin_10;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin=GPIO_Pin_1|GPIO_Pin_0|GPIO_Pin_2|GPIO_Pin_3;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;GPIO_Init(GPIOE,&GPIO_InitStructure);}中断函数:(可在stm32f10x_.it.c中调用)void USART1_IRQHandler(void){u8 RX_dat; //定义字符变量if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //判断发生接收中断{GPIO_WriteBit(GPIOE, GPIO_Pin_1, (BitAction)0x01); //LED MRX_dat=(USART_ReceiveData(USART1) & 0x7F); //接收数据,整理除去前两位USART_ClearITPendingBit(USART1, USART_IT_RXNE); //清除中断标志while(USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == RESET){}//等待接收结束// USART_ITConfig(USART1, USART_IT_RXNE, DISABLE); //关中断USART_SendData(USART1,RX_dat); //发送数据GPIO_WriteBit(GPIOE, GPIO_Pin_2, (BitAction)0x01); //LED M }}。
程序实现功能:可以直接接收USART1的数据,并通过串口调试输出显示
#include"stm32f10x_lib.h"
void NVIC_Configuration(void);
void RCC_Configuration(void);
void GPIO_Configuration(void);
ErrorStatus HSEStartUpStatus;
USART_InitTypeDef USART_InitStructure;
USART_ClockInitTypeDef USART_ClockInitStructure;
int main()
{
#ifdef DEBUG
debug
#endif
RCC_Configuration();
NVIC_Configuration();
GPIO_Configuration();
/*串口传输速率的大小必须与RCC所设定的时钟相对应起来*/
USART_ART_BaudRate = 9600; //设置USART的传输速率/*设定数据的接收发送模式*/
USART_ART_WordLength = USART_WordLength_8b;//在一帧中传输或接受8位数据位
USART_ART_StopBits = USART_StopBits_1; //定义在帧的结尾传输一个停止位
USART_ART_Parity = USART_Parity_No; //奇偶失能
USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None; //指定硬件流控制模式RTS和CTS使能
USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx; //指定使能或失能发送和接受模式Tx发送使能和Rx接收使能
USART_Clock ART_Clock = USART_Clock_Disable; //提升USART时钟时使能还是失能,钟低电平活动
USART_ART_CPOL = USART_CPOL_Low; //指定SLCK引脚上时钟的极性
USART_ART_CPHA = USART_CPHA_2Edge; //时钟第二个边缘进行数据捕获
USART_ART_LastBit = USART_LastBit_Disable; //在SCLK引脚上输出最后发送的那个数据字的脉冲不从SCLK输出
USART_ClockInit(USART1, &USART_ClockInitStructure);
USART_Init(USART1, &USART_InitStructure);
/*输入输出的中断使能*/
// USART_ITConfig(USART1, USART_IT_TXE, ENABLE);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
USART_Cmd(USART1, ENABLE); //启动串口使能USART1外设
while(1)
{
}
/*
USART_SendData(USART1, 0X26); //发送数据
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET){}//等待发送结束*/
}
void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
#ifdef VETB_TAB_RAM
NVYC_SetVectorTable(NVIC_VectTab_RAM,0x0);
#else
NVIC_SetVectorTable(NVIC_VectTab_FLASH, 0x0);
#endif
/* Enable the USART1 Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQChannel; //通道设置为串口1中断(故后面应选择在“void USART1_IRQHandler(void)”开中断)
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //中断占先等级0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //中断响应优先级0 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //打开中断
NVIC_Init(&NVIC_InitStructure);
}
void RCC_Configuration(void)
{
RCC_DeInit();
RCC_HSEConfig(RCC_HSE_ON);
HSEStartUpStatus=RCC_WaitForHSEStartUp();
if(HSEStartUpStatus==SUCCESS)
{
FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);
FLASH_SetLatency(FLASH_Latency_2);
RCC_HCLKConfig(RCC_SYSCLK_Div1);
RCC_PCLK2Config(RCC_HCLK_Div1); //串口波特率的确定
RCC_PCLK1Config(RCC_HCLK_Div2);
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);
RCC_PLLCmd(ENABLE);
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY==RESET)) {}
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);
while(RCC_GetSYSCLKSource()!=0x08){}
}
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOE|RCC_APB 2Periph_USART1, ENABLE); //RCC中打开相应的串口
}
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// GPIO_PinRemapConfig(GPIO_Remap_USART1, ENABLE); //改变指定管脚脚的映射Changes the mapping of the specified pin
/* Configure USART1 RTS (PA12) and USART1 Tx (PA9) as alternate function push-pull 根据资料可查得各管脚对应*/
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure USART2 CTS (PA11) and USART1 Rx (PA10) as input floating */
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_1|GPIO_Pin_0|GPIO_Pin_2|GPIO_Pin_3;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_Init(GPIOE,&GPIO_InitStructure);
}
中断函数:(可在stm32f10x_.it.c中调用)
void USART1_IRQHandler(void)
{
u8 RX_dat; //定义字符变量
if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //判断发生接收中断{
GPIO_WriteBit(GPIOE, GPIO_Pin_1, (BitAction)0x01); //LED M
RX_dat=(USART_ReceiveData(USART1) & 0x7F); //接收数据,整理除去前两位USART_ClearITPendingBit(USART1, USART_IT_RXNE); //清除中断标志while(USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == RESET){}//等待接收结束
// USART_ITConfig(USART1, USART_IT_RXNE, DISABLE); //关中断USART_SendData(USART1,RX_dat); //发送数据
GPIO_WriteBit(GPIOE, GPIO_Pin_2, (BitAction)0x01); //LED M }
}。