ADAMS_Car与MATLAB的液压主动悬架平顺性仿真研究
- 格式:pdf
- 大小:499.26 KB
- 文档页数:4

基于ADAMS和MATLAB的汽车主动悬架联合仿真研究基于ADAMS和MATLAB的汽车主动悬架联合仿真研究1. 引言在现代汽车工业中,悬挂系统是保证车辆行驶平稳性和乘坐舒适性的重要组成部分。
传统的汽车悬挂系统是被动的,通过弹簧和减振器来吸收路面不平造成的冲击力,但对于不同路面条件和行驶动态的应对能力有一定的局限性。
随着科技的进步和人们对驾驶体验的要求提高,汽车的主动悬挂系统逐渐得到了广泛关注。
主动悬挂系统能够通过感知路面信息和车辆状态来实时调整悬挂参数,从而提高车辆的行驶稳定性和乘坐舒适性。
2. 主动悬挂系统的工作原理主动悬挂系统由悬挂执行机构、传感器和控制算法等组成。
传感器用于感知路面信息和车辆状态,悬挂执行机构负责实时调整悬挂参数。
控制算法根据传感器获取的信息来生成相应的控制策略,控制悬挂执行机构的工作。
3. ADAMS仿真模型建立ADAMS是一款用于多体动力学仿真的软件,可以模拟机械系统的动力学行为。
在本研究中,我们使用ADAMS软件建立了主动悬挂系统的仿真模型,包括车身、车轮、悬挂执行机构等。
通过在ADAMS中定义悬挂系统的各个参数和控制策略,我们可以模拟不同工况下悬挂系统的工作状态。
4. MATLAB控制算法设计MATLAB是一款强大的数学计算和仿真软件,我们使用MATLAB来设计主动悬挂系统的控制算法。
在控制算法设计中,我们需要考虑路面信息的感知、悬挂参数的调节等因素。
通过MATLAB的编程和仿真工具,我们可以方便地设计和验证不同控制策略的性能。
5. 联合仿真与分析在ADAMS和MATLAB的联合仿真中,我们将MATLAB中设计的控制算法与ADAMS中的悬挂系统模型相结合,进行系统级的仿真和分析。
通过联合仿真,我们可以模拟车辆在不同路面条件下主动悬挂系统的工作情况,评估系统的控制性能和对车辆行驶动态的影响。
6. 结果与讨论通过联合仿真和分析,我们可以得到主动悬挂系统在不同路面条件下的反馈响应结果。

基于ADAMS的越野车整车平顺性仿真研究及悬架的参数优化的开题报告一、研究背景越野车是指能够适应未经铺装的路面行驶的车辆,因其具有强大的通过性和横向稳定性,在野外探险、越野竞赛、军事任务等场合有广泛的应用。
在越野车的设计中,整车平顺性是一个非常重要的指标,它直接影响到车辆性能和乘坐的舒适度。
通过采用虚拟仿真技术,可以快速地对整车平顺性进行评估,并且可以快速优化车辆参数,减少测试样车的数量和试验的时间。
二、研究目的本课题旨在使用ADAMS软件对越野车整车平顺性进行仿真研究,并通过对悬架系统的参数优化,提高车辆的平顺性能。
三、研究内容1、越野车整车平顺性标准根据不同的道路条件和车速,制定不同的整车平顺性标准。
2、越野车模型建立及验证使用CATIA软件建立越野车三维模型,导入ADAMS仿真软件进行运动学及动力学仿真,并验证模型合理性。
3、越野车整车平顺性仿真分析根据整车平顺性标准,对越野车进行整车平顺性仿真分析,并对仿真结果进行分析和解读。
4、悬架参数优化根据整车平顺性仿真结果,通过对悬架系统的参数进行优化设计,提高车辆的平顺性能。
5、仿真结果分析与验证通过仿真结果的对比分析和试验验证,验证优化结果的正确性和可靠性。
四、研究意义本次研究可以提高越野车的整车平顺性能,增强车辆的可靠性和安全性,为越野车的设计和生产提供参考,也为后续的仿真研究提供了实际案例。
同时,本次研究也为虚拟仿真技术在汽车设计中的应用提供了一个典型案例。
五、研究方法本研究采用虚拟仿真技术,使用ADAMS软件对越野车整车平顺性进行仿真研究,包括建立模型、运动学及动力学仿真、仿真分析等步骤。
同时,结合试验验证,对仿真结果进行分析和评估,得出优化结论。
六、预期结果1、基于ADAMS软件的越野车整车平顺性仿真分析。
2、越野车悬架系统参数的优化设计。
3、仿真结果的分析与验证,为越野车设计和生产提供参考。
七、研究方案1、文献调研:对越野车整车平顺性、虚拟仿真技术等方面的文献进行调研,并进行梳理。
第19卷第10期系统仿真学报©V ol. 19 No. 10 2007年5月Journal of System Simulation May, 2007基于ADAMS-MATLAB联合仿真的汽车悬架半主动控制李韶华1,2,杨绍普2,李皓玉1,2(1.北京交通大学机械与电子控制工程学院, 100044 北京; 2.石家庄铁道学院 050043, 河北石家庄)摘要:利用ADAMS建立了随机激励四分之一汽车悬架模型,利用MATLAB设计了一种基于改进Bingham模型的汽车半主动控制策略,然后进行ADAMS-MATLAB联合仿真,深入研究了被动控制、半主动开关控制及基于改进Bingham模型的半主动控制的效果。
研究发现,采用所提出的基于改进Bingham模型的半主动控制策略后,汽车悬架系统的车身加速度、悬架变形、车轮动载、车轮侧滑移分别比被动控制下降27%、17.6%,、9.7%、18.6%,而半主动开关控制只比被动控制下降19.6%、9.2%、7.4%、9.3%。
这说明所提出的基于改进Bingham模型的半主动控制策略大大优于其他两种控制策略。
关键词:汽车悬架;半主动控制;改进Bingham模型;ADAMS;MATLAB中图分类号:TP391.9; U463.33 文献标识码:A 文章编号:1004-731X (2007) 10-2304-04 Investigation on Semi-active Controlled Vehicle SuspensionBased on Adams-Matlab Co-simulationLI Shao-hua1,2, YANG Shao-pu2, LI Hao-yu 1,2(1.School of Mechanical and Electronic Engineering, Beijing Jiaotong University, Beijing 100044, China;2. Shijiazhuang Railway Institute, Shijiazhuang 050043, China)Abstract: A 1/4 vehicle suspension model with stochastic road excitation was built by ADAMS. A semi-active vehicle control strategy on revised Bingham model was designed by MA TLAB. Then effects of passive control, semi-active on-off control and semi-active control on revised Bingham model were investigated based on ADAMS-MATLAB co-simulation. It is found that compared to passive suspension, the proposed semi-active control on revised Bingham model can reduce the vehicle suspension system’s body acceleration, suspension deformation, wheel force, and wheel by 27%,17.6%,9.7%,18.6%, but the semi-active on-off control can only reduce these parameters by 19.6%,9.2%,7.4%,9.3%. This shows that the proposed semi-active control on revised Bingham model is much better than the other two control strategies.Key words: vehicle suspension; semi-active control; the revised Bingham model; ADAMS; MATLAB引言汽车悬架是一个复杂的非线性系统,对于汽车悬架半主动控制的研究起步较早,成果非常丰富[1-3]。


基于ADAMS和MATLAB的汽车主动悬架联合仿真
汪立明;谢伟东
【期刊名称】《机械设计与制造》
【年(卷),期】2007(000)007
【摘要】汽车悬架的动力学性能直接影响到汽车的安全性和操纵稳定性,利用ADAMS软件建立了四分之一汽车主动悬架的机械模型,并和MATLAB进行了联合仿真.结果表明基于模糊控制的汽车主动悬架减小了车辆振动,提高了车辆的平顺性和安全性.为汽车悬架减振性能的开发设计提供了一种有效的方法.
【总页数】2页(P96-97)
【作者】汪立明;谢伟东
【作者单位】浙江工业大学,机械制造及自动化教育部重点实验室,杭州,310032;浙江工业大学,机械制造及自动化教育部重点实验室,杭州,310032
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.基于ADAMS和MATLAB的主动悬架控制联合仿真研究 [J], 薛盛兴;张立军;张庆文
2.基于ADAMS和MATLAB的汽车半主动悬架的仿真研究 [J], 吕魁超;赵玉河;郭建亭
3.基于ADAMS与Matlab的半主动悬架联合仿真研究 [J], 朱华
4.汽车半主动悬架的ADAMS和MATLAB联合仿真 [J], 支龙;昌放辉;陈立平;张云
清
5.基于ADAMS和MATLAB的整车半主动悬架联合仿真 [J], 董院政;刘清平因版权原因,仅展示原文概要,查看原文内容请购买。
基于ADAMS和MATLAB的空气悬架系统仿真与试验研究空气悬架系统是一种采用空气弹簧作为弹性元件、电磁阀作为控制元件的先进悬架系统,其具有优良的适应性和可调性。
本文以ADAMS和MATLAB为工具,通过仿真和试验研究空气悬架系统的动态性能和控制策略。
首先,利用ADAMS建立了空气悬架系统的三维模型,包括汽车车身、四个轮子、空气弹簧和电磁阀等组成部分。
然后,运用ADAMS中的控制分析功能,分别设计了PID控制、模糊控制和神经网络控制三种控制策略,并通过仿真分析了它们的动态性能。
结果表明,三种控制策略在提高空气悬架系统的稳定性和舒适性方面均起到了显著的作用,其中神经网络控制效果最为优秀。
为了验证仿真分析的结果,本文对空气悬架系统进行了实际试验研究。
试验采用了与仿真模型一致的系统组成和控制策略,通过对空气悬架系统在不同路况下的动态响应进行测量和分析,得到了与仿真结果基本一致的结论。
试验结果表明,空气悬架系统在不同路况下均具有较好的适应性和可调性,且控制策略能够显著提高其稳定性和舒适性。
综合而言,本文采用ADAMS和MATLAB工具,从仿真模型到实际试验,对空气悬架系统进行了深入研究,通过分析不同控制策略的动态性能,为实际应用提供了科学依据和参考。
这一研究不仅可为汽车工业的发展提供技术支持,也有望在其他工业领域得到应用。
除了上述提到的控制策略,实际应用中,还可以采用基于模型预测控制、基于状态反馈控制等策略,进一步优化空气悬架系统的控制效果。
比如,基于模型预测控制可以通过建立系统动态模型,预测未来的系统状态并进行优化控制,以实现更精确的控制效果。
而基于状态反馈控制可以实现对系统状态的实时监测和响应,以使控制策略更加灵活和精准。
此外,应用新型传感器和智能算法等技术,还可以进一步提高空气悬架系统的控制能力和稳定性。
例如,在传感器方面,采用更高精度和更全面的参数监测,可以实现对系统压力、位移、速度等关键参数的实时监测和反馈。
2007年2月第21卷第1期装甲兵工程学院学报Journal of Academy of A r mored Force Engineering Feb .2007Vol .21No .1 文章编号:167221497(2007)0120045203基于ADA M S /Car 与M AT LAB 的液压主动悬架平顺性仿真研究张晓芬1 丛 华2 晁志强1 刘相波1(11装甲兵工程学院机械工程系,北京100072;21装甲兵工程学院科研部,北京100072)摘 要:利用ADAM S/Car 建立了传统被动弹簧与液压缸串联的主动悬架模型,与其它子系统装配组成整车仿真模型,并在MAT LAB /SI M UL I N K 的环境下建立主动悬架的P I D 控制系统,实现了与整车机械模型的联合仿真。
仿真结果表明,采用液压主动悬架系统后,车辆在通过路面凸起处时车体质心垂向加速度得到了有效抑制,从而提高了车辆的行驶平顺性和乘坐舒适性。
关键词:ADAM S/CAR;主动悬架;联合仿真;车辆平顺性中图分类号:T J81+01332 文献标志码:AResearch on the Hydrauli c 2acti ve Suspen si on R i de Sm oothness S i m ul a ti on Ba sed on ADA M S /Car and M ATLABZ HANG Xiao 2fen 1 CONG Hua 2 CHAO Zhi 2qiang 1 L I U Xiang 2bo1(11Depart m ent of Mechanical Engineering,Acade my of A r mored Force Engineering,Beijing 100072,China;21Depart m ent of Science Research,Academy of A r mored Force Engineering,Beijing 100072,China )Abstract:Hydraulic 2active sus pensi on model is been built with ADAMS/CAR s oft w are,which is com 2posed of the traditi onal passive s p ring and hydraulic cylinder .Then the full vehicle si m ulati on model is as 2se mbled with active sus pensi on and other subsyste m s .I n order t o accomp lish co 2si m ulati on,a P I D contr ol 2ler is designed basing on MAT LAB /Si m ulink .The co 2si m ulati on results indicates that after the hydraulic active sus pensi on is adop ted and when the vehicle passes thr ough the heave r oad,the vertical accelerati on of the vehicle is effectively decreased thus i m p r oving the s moothness of the passing vehicle and the riding comf ort .Key words:ADAMS/CAR;active sus pensi on;co 2si m ulati on;vehicle s moothness收稿日期:2006201210基金项目:军队科研计划项目作者简介:张晓芬(19822),女,山西临猗人,硕士研究生. 随着计算机技术与汽车开发技术的不断融合,虚拟仿真技术在汽车设计中得到了广泛的应用[122]。
ADAMS 软件就是一种较成熟的汽车虚拟仿真技术,它采用多刚体系统动力学理论中的拉格朗日方程方法建立系统动力学方程,可以对虚拟机械系统进行静力学、运动学和动力学分析。
MAT LAB /SI M U 2L I N K 模块化图形动态系统仿真工具是实现控制系统设计的优秀软件。
利用ADAMS/CAR 和MAT 2LAB /SI M UL I N K 的联合仿真技术,可以使机械系统设计和控制系统设计共享一个虚拟模型,同时进行验证和试验。
汽车减振主要依赖于悬架系统,它由弹性元件和阻尼元件组成,传统被动悬架的阻尼和刚度参数一般按经验设计或优化设计方法选择,一经选定,在车辆行驶过程中就无法进行调节。
设计装甲兵工程学院学报第21卷 中若要提高乘坐舒适性,往往以牺牲行驶安全性为代价。
主动悬架可实现根据不同路况和车辆运行状态主动调节悬架系统的刚度、减振器阻尼系数,以达到在不降低安全性能的前提下提高舒适性,因此受到国内外汽车行业的广泛重视[324]。
笔者利用多体动力学分析软件对某轿车的动力学特性进行仿真。
首先建立了主动悬架系统并利用ADAMS/Car中的模板装配成整车模型,重点研究了液压主动悬架技术对汽车平顺性的影响,得出其对整车平顺性的影响规律。
1 利用ADAM S/Car建立仿真模型1.1 ADA M S/Car二次开发模块简介ADAMS/Car多体系统动力学分析软件具有丰富的建模功能和强大的运动学与动力学解算能力,利用它可建立规模庞大、机构复杂、系统级的仿真模型。
按照建模-调整参数-仿真计算-数据后处理的思路,ADAMS/CAR软件开发模块具有更强的专业性。
利用该软件进行悬架性能参数对车辆平顺性影响的研究,可使建模和仿真既简单又精确。
1.2 建立主动悬架模型ADAMS/Car解算程序模块提供了一个直接面向用户的基本操作对话环境和虚拟样机分析的前处理功能。
在汽车悬架系统设计中,利用ADAMS/Car 专家模板建立主动悬架动力学机械模型时需做如下假设:1)所有零部件都认为是刚体,各运动副均为刚性连接,各运动副内摩擦力、内部间隙忽略不计;2)弹簧的剩余压缩量需满足S Re≥50mm;3)活塞与缸筒通过移动副相连,只做上下垂直运动。
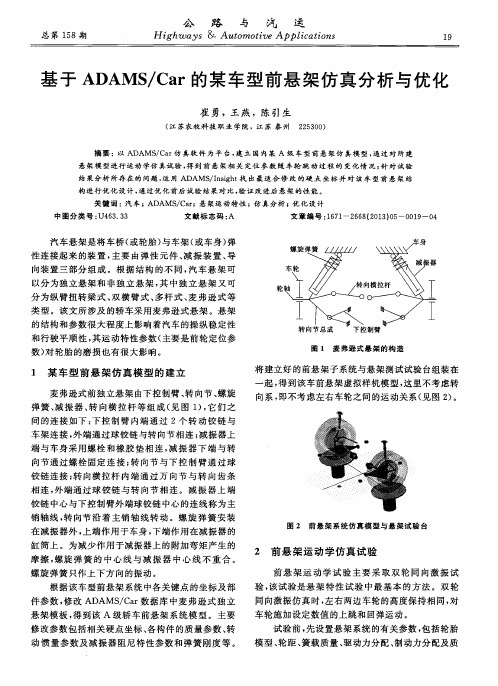
图1为利用ADAMS/Car建立的主动前悬架仿真模型,此悬架系统采用的是传统弹簧与液压缸串联,然后再与阻尼器并联的结构。
其中,液压缸内径为50mm,全行程为125mm,传统弹簧的刚度为119×105N/m,悬架阻尼为1286N・s・m-1。
另外,模型还加装了横向稳定杆来提高车辆操纵的稳定性。
这种悬架结构在实际应用中的优点是仅需执行机构具有有限的频率响应特性,其不足之处是悬架所需空间较大。
车辆后悬架与前悬架的结构基本相同。
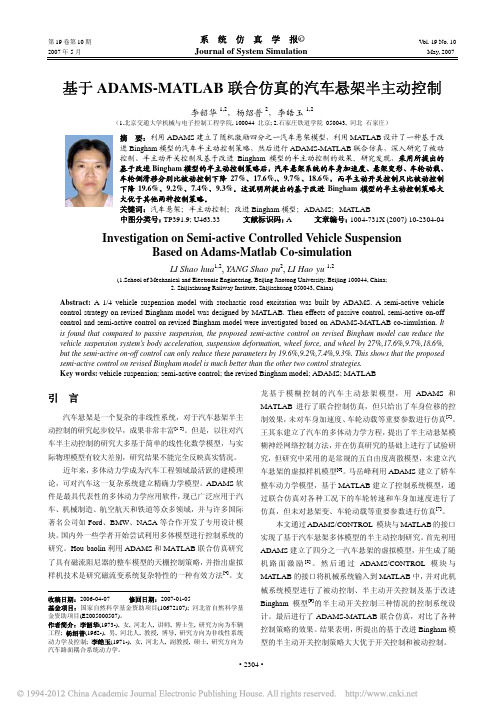
1.3 建立整车模型采用自下而上的建模方式建立了整车动力学仿真模型,该模型包括前后悬架、转向系统、车身系统图1 主动悬架仿真模型和前后稳定杆系统、轮胎。
图2所示为装配后的整车虚拟样机仿真模型。
为了清晰地表达各个子系统的相互连接关系,将车身总成简化为车体质心处的集中质量和绕质心3根轴的转动惯量,具有6个自由度,此方法并不影响仿真分析的结果。
图2中,整车的整备质量为1175kg,转向操纵子系统采用齿轮齿条式,前轮轮距为1385mm,后轮轮距为1365mm,轴距为2340mm,轮胎型号采用165/70R。
图2 整车虚拟样机仿真模型2 联合仿真模型根据选取的控制变量设计P I D控制器的算法,利用ADAMS/Car的Contr ol Plant模块输出悬架与车体连接处的垂向加速度(包括左前、右前、左后和右后),与设定的加速度信号a(设为0)进行比较,得到垂向加速度的误差信号,通过P I D控制器进行调解,得到的值作为控制器的输出变量。
控制算法为u(k)=k p・error(k)+k d・error1(k)-error1(k-1)T s+k i・∑ki=1erro r(i)・T s,error(k)=r(k)-y(k).式中 Ts为采样时间;u为控制器输出;r为加速度设定目标值;y为对应ADAMS/Car整车模型输出的垂直振动加速度;k为采样序号,k=1,2,…,err or(k64 第1期张晓芬等:基于ADAM S/Car 与MAT LAB 的液压主动悬架平顺性仿真研究-1)和err or (k )分别为第k -1和第k 时刻所得的偏差信号。
根据经验公式采用凑试法选择不同的P I D 参数进行仿真,这种方法既直观方便又便于调整与改进。
凑试时,根据经验公式和主动悬架系统的特性对参数进行先比例,后积分,再微分的整定步骤,最终得出的P I D 初始整定系数为:k p =01015,k i =210,k d =0105。
利用SI M UL I N K 建立的联合仿真模型如图3所示。
其中的液压子系统(以Hydraulic_Subsyste m 中的左前悬架液压系统为例)如图4所示。
图3 联合仿真模型图4 左前悬架液压系统3 仿真结果及结论车辆在公路上行驶时,有时会遇到很凸出的障碍物,这里对车辆脉冲输入行驶试验进行仿真,仿真工况的定义参照G B5902286[5],采用长坡形的单凸块作为脉冲输入,路面激励的峰值为100mm ,障碍物的宽度B 可以按需要而定,但必须大于轮距,参考文中车辆模型的轮距仿真时B 取3m 。
仿真时,保证车辆的初始速度均为30km /h,联合仿真时间设为5s,采用等步长求解法,得到仿真结果别如图5-7所示。
图5-7的仿真结果表明,与被动悬架相比较,采用P I D 控制的主动悬架可以大幅度提高车辆的乘坐舒适性,车辆的垂直加速度有明显下降。
该主动悬架系统可以很好地降低车身加速度幅值,达到抑制、衰减车身振动,改善车辆行驶平顺性的目的。
图5 左前、右前悬架垂直加速度(下转第61页)74 第1期冯 亮等:坦克炮控系统的反演滑模鲁棒摩擦补偿控制图4 系统位置跟踪曲线4 结束语针对炮控系统低速摩擦存在不确定、非线性环节,笔者提出反演滑模鲁棒控制方法。
采用该方法无需知道系统精确的数学模型,而且能克服参数不确定性和补偿非线性摩擦力矩。
参考文献:[1] 臧克茂,马晓军.装甲车辆电力传动系统及其设计[M ].北京:国防工业出版社,2004.[2] 刘强,尔联洁,刘金琨.摩擦非线性环节的特性、建模与控制补偿综述[J ].系统工程与电子技术,2002,24(11):45252.[3] 刘强,尔联洁,刘金琨.参数不确定机械伺服系统的鲁棒非线性摩擦补偿控制[J ].自动化学报,2003,29(4):6282632.[4] 胡跃明.变结构控制理论与应用[M ].北京:科学出版社,2003.[5] 孙常胜,田杰,陈杰,等.战车稳定器最优滑动模态变结构控制仿真研究[J ].计算机仿真,2001,18(1):79283.[6] 沈艳霞,吴定会,李三东,等.永磁同步电机位置跟踪控制器及Backstepp ing 方法建模[J ].系统仿真学报,2005,17(6):131821321.[7] 武玉强,李洪亮,孙海龙,等.基于Backstepp ing 方法的多变量系统自适应控制[J ].控制与决策,2001,16(1):90296.[8] 周启煌,常天庆,邱晓波.战车火控系统与指挥系统[M ].北京:国防工业出版社,2003.[9] 孙常胜,陈杰,窦丽华.基于最优化的坦克稳定器滑动模态变结构控制[J ].兵工学报,2001,22(1):15218.(责任编辑:牛燕平)(上接第47页)图6 左后、右后悬架垂直加速度图7 车辆质心处垂直加速度参考文献:[1] 宗振奇.虚拟技术在汽车工业中的应用[J ].沈阳大学学报,2005,17(6):49252.[2] 陈潇凯,林逸,施国标,等.多体系统动力学软件在汽车工程中应用的新进展[J ].计算机仿真,2005,22(6):2012204.[3] 李军,孟红,张洪康,等.汽车悬架参数对操纵稳定性影响的仿真分析研究[J ].车辆与动力技术,2001,1(4):24227.[4] 陈跃勇,丛华.主动悬架系统中作动器模型的建立及性能分析[J ].装甲兵工程学院学报,2004,18(4):32234.[5] G B 5902286车辆平顺性脉冲输入行驶试验方法.(责任编辑:张瑞清)16。