ADAMS脉冲平顺性仿真问题总结
- 格式:doc
- 大小:862.50 KB
- 文档页数:5
基于ADAMS的汽车平顺性仿真分析贺翠华,王树凤(山东理工大学交通与车辆工程学院,山东淄博255049)摘要:本文利用动力学仿真软件ADAMS对汽车的平顺性进行了分析。
首先在view中建立了车身与车轮双质量二自由度振动模型,然后用vibration模块对其进行了振动仿真分析。
分别研究了悬架刚度、悬架阻尼系数、非悬挂质量和轮胎刚度对平顺性的影响。
结果表明,在相同的路面输入下,通过合理选择悬架和轮胎参数可以明显改善汽车平顺性。
关键词:平顺性;仿真;性能评价;虚拟样机技术The Research of Vehicle Riding Comfort Based onADAMSHE Cui-hua;WANG Shu-feng(School of Transportation and Vehicle Engineering,Shandong University of Technology,Zibo China255049)Abstract:The riding comfort is one of the most important performances of vehicle.This paper analyses the vehicle riding comfort performance using ADAMS/view.According to the vehicle vibration theory,the vehicle is simplified to a dual mass model with two freedoms.The simulation of the model is carried out using ADAMS/Vibration.The influence of suspension stiffness,damping,body mass and tire stiffness on the comfort has been investigated.The result shows that choosing the appropriate parameters of suspension and tire can improve the vehicle riding comfort performance. Key words:riding comfort performance;simulation;performance assessment1引言随着汽车车速的提高,汽车的乘坐舒适性越来越受到人们的重视,而汽车的乘坐舒适性与汽车的平顺性息息相关。
基于ADAMS矿用车辆平顺性影响因素分析高德峰;马志国【摘要】车辆平顺性是车辆在行驶过程中对振动的适应度的性能,对其的影响因素较多.应用三维建模软件Soldworks和机械系统动力学仿真分析软件ADAMS,建立矿用汽车在随机路面和波形路面输入条件下的平顺性仿真模型,并进行各种工况的仿真.分别改变车速、悬架刚度、簧载质量、簧载质量质心位置、路面不平度等影响整车平顺性的因素,分析这些因素对平顺性的影响程度.仿真结果表明,矿用汽车满载比空载工况行驶平顺性更好;满载时,将油气悬架的刚度等效为线性刚度来分析汽车的振动情况,误差较小;分析结果为进一步设计分析提供参考.%Vehicle ride comfort is the performance of the vehicle's adaptability to the vibration in the process of driving,and the influence factors are more.The dynamic simulation model of the ride comfort of the mining dump truck in the random road and the waveform of the input condition has been established with software ADAMS and Soldworks.The model is simulated,while the factors affecting riding quality such as velocity,stiffness of suspensions,location of the mass center of the truck body upon the suspensions and road surface roughness has been changed individually.The simulation results have shown that the body vibration is more intense while no load than full load.The error is smaller when suspension equivalent stiffness as linearity to analyze truck vibration under full load conditions.The analysis results provide references for the further design and analysis.【期刊名称】《机械设计与制造》【年(卷),期】2018(000)003【总页数】4页(P198-200,204)【关键词】矿用汽车;平顺性;随机路面;模型;试验;影响因素【作者】高德峰;马志国【作者单位】黄河科技学院机械工程学院,河南郑州450063;黄河科技学院机械工程学院,河南郑州450063【正文语种】中文【中图分类】TH16;TP391.9;U461.41 引言平顺性是车辆的重要性能之一,对其的影响因素较多,既有发动机、路面、传动系统等的振动影响,也有车辆悬架系统的影响,而后者是对其起决定性作用的因素。
基于ADAMS对商用车推力杆布置及整车平顺性的仿真分析和探讨摘要:本文基于ADAMS仿真软件对商用车推力杆布置及整车平顺性进行了分析和探讨。
首先,对推力杆的结构进行建模和参数设置,然后利用ADAMS软件对不同布置方式的推力杆进行仿真,分析了推力杆对整车平顺性的影响。
通过对仿真结果的分析和比较,得出了较优的推力杆布置方案,提供了对商用车设计的参考依据。
关键词:ADAMS;商用车;推力杆;布置方案;平顺性分析正文:商用车的整车平顺性对乘客的舒适度和车辆的安全性具有重要影响。
推力杆作为商用车的关键部件之一,其布置方式直接影响到整车的平顺性。
因此,对商用车推力杆布置及整车平顺性进行仿真分析和探讨,对于优化商用车设计具有重要意义。
1、推力杆的结构建模和参数设置推力杆主要由杆体、连接杆和球头组成。
杆体为直杆,一端连接发动机,另一端连接传动系统。
连接杆连接杆体和球头。
球头连接车架,在转向时起到缓冲作用。
为了进行仿真分析,需要对推力杆的结构进行建模,并设置参数。
具体参数如下:杆体总长:1500mm;连接杆长度:200mm;球头长度:80mm;球头半径:50mm;连接杆弯曲角度:45°;弯曲半径:100mm。
2、不同布置方式的推力杆仿真分析为了分析不同布置方式的推力杆对整车平顺性的影响,本文分别对前置推力杆、后置推力杆和无推力杆三种布置方式进行了仿真分析。
仿真过程中,将商用车的结构参数和运动参数输入ADAMS软件中,对推力杆的位移、速度和加速度进行监测。
3、仿真结果分析通过对仿真结果的分析和比较,得出了以下结论:(1)前置推力杆的布置方式会使整车具有较好的稳定性和平顺性。
但是,受到推力杆造成的支点约束,使整车的灵活性受到了一定的影响。
(2)后置推力杆的布置方式使整车具有较好的灵活性和转向性能。
但是,在高速行驶和弯道行驶时,整车的稳定性和平顺性会受到一定的影响。
(3)无推力杆的布置方式会让整车的平顺性和操控性都受到一定程度的影响。
ADAMS脉冲平顺性仿真问题小结一、问题的提出现由于需要根据平顺性能来匹配减震器,而不是简单的评价整车平顺性的好坏,所以对平顺性仿真提出了比以往更高的要求:不仅最大加速度要与实验数据相符,而且仿真的振动波形也应正确一一其振动加速度的时间历程,都可以在物理上得以解释,不一定与实验中的波形相符的很好,但其误差可以得以较为准确的判断。
这样好为后续的评价和优化工作做准备。
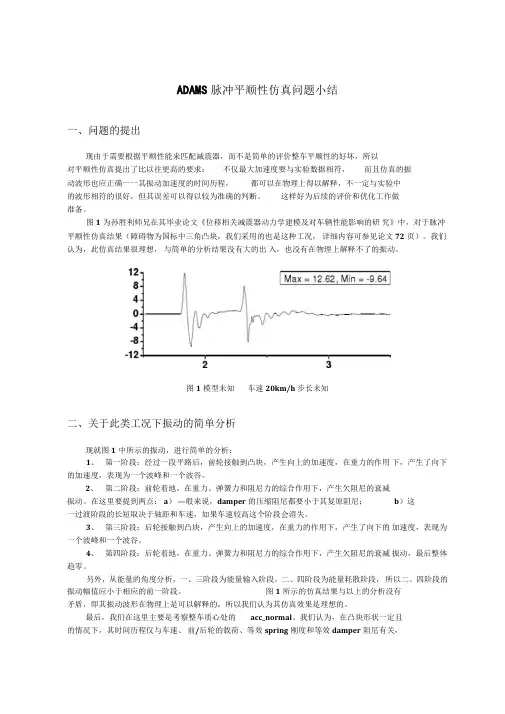
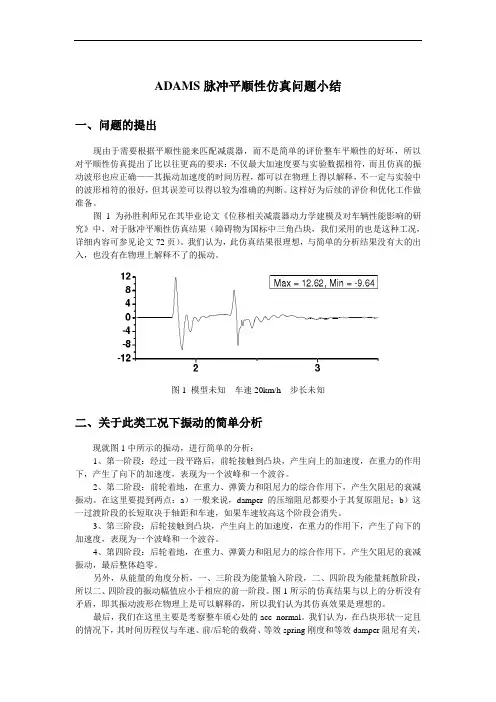
图1为孙胜利师兄在其毕业论文《位移相关减震器动力学建模及对车辆性能影响的研究》中,对于脉冲平顺性仿真结果(障碍物为国标中三角凸块,我们采用的也是这种工况,详细内容可参见论文72页)。
我们认为,此仿真结果很理想,与简单的分析结果没有大的出入,也没有在物理上解释不了的振动。
图1模型未知车速20km/h 步长未知二、关于此类工况下振动的简单分析现就图1中所示的振动,进行简单的分析:1、第一阶段:经过一段平路后,前轮接触到凸块,产生向上的加速度,在重力的作用下,产生了向下的加速度,表现为一个波峰和一个波谷。
2、第二阶段:前轮着地,在重力、弹簧力和阻尼力的综合作用下,产生欠阻尼的衰减振动。
在这里要提到两点:a)—般来说,damper的压缩阻尼都要小于其复原阻尼;b)这一过渡阶段的长短取决于轴距和车速,如果车速较高这个阶段会消失。
3、第三阶段:后轮接触到凸块,产生向上的加速度,在重力的作用下,产生了向下的加速度,表现为一个波峰和一个波谷。
4、第四阶段:后轮着地,在重力、弹簧力和阻尼力的综合作用下,产生欠阻尼的衰减振动,最后整体趋零。
另外,从能量的角度分析,一、三阶段为能量输入阶段,二、四阶段为能量耗散阶段,所以二、四阶段的振动幅值应小于相应的前一阶段。
图1所示的仿真结果与以上的分析没有矛盾,即其振动波形在物理上是可以解释的,所以我们认为其仿真效果是理想的。
最后,我们在这里主要是考察整车质心处的acc_normal。
我们认为,在凸块形状一定且的情况下,其时间历程仅与车速、前/后轮的载荷、等效spring刚度和等效damper阻尼有关,而与悬架类型无关。
基于ADAMS的汽车脉冲路面仿真宋年秀; 刘亚光; 张丽霞【期刊名称】《《汽车零部件》》【年(卷),期】2019(000)009【总页数】4页(P1-4)【关键词】脉冲路面; 脉冲输入; 平顺性【作者】宋年秀; 刘亚光; 张丽霞【作者单位】青岛理工大学机械与汽车工程学院山东青岛266033【正文语种】中文【中图分类】U270.20 引言汽车在道路上行驶时难免会遇到诸如减速带、凹坑、凸块等各种不平工况,当汽车通过这些障碍时,轮胎传至驾驶员座椅处的振动加速度会发生较大的波动。
为了将这种行驶工况考虑在内,通常情况下采用长为400 mm的三角形单凸块[1]。
根据试验条件不同,脉冲输入可用相应高度的凸块或减速带,而并未对为何使用三角形凸块或是减速带进行阐述。
针对国家标准GB/T 4970-2009[2]所提出的对路面脉冲激励的评价方法进行仿真分析。
首先基于ADAMS/Car,利用某普及型轿车的相关参数,建立包括悬架、车身、轮胎、转向系统在内的整车系统,对各车速下的包括:矩形凸块、斜角凸块、凹坑、减速带在内的6种脉冲输入进行平顺性仿真,并对仿真结果进行分析比较,得到更适宜作为脉冲输入的脉冲轮廓类型。
最后,在脉冲路面的仿真过程中,将随机路面考虑在内,使平顺性仿真更加符合实际工况。
1 整车模型的建立通过对该轿车的测量以及对其相关参数进行查询,得到了整车的主要参数,如表1所示。
在ADAMS/Car中,根据得到的相关参数建立各个子系统的模型,最后将其组装成整车模型并进行平顺性分析。
本文作者选用轿车的前后悬架分别为双横臂独立悬架以及多连杆悬架,对其进行建模得到如图1和图2所示的悬架模型,最终对各子系统进行装配得到如图3所示的轿车整车模型。
表1 整车主要参数参数数值整车整备质量/kg1 360底盘质心高度/mm560质心距前轴距/mm1 125质心距后轴距/mm1 450车身绕横轴转动惯量/(kg·mm2)6.2×108车身绕纵轴转动惯量/(kg·mm2)2.0×108前悬架垂直刚度/(N·mm-1)31前悬架阻尼系数/(N·s·mm-1)2.8后悬架垂直刚度/(N·mm-1)26后悬架阻尼系数/(N·s·mm-1)2.5前轮距/mm1 432后轮距/mm1 220前后轴距/mm2 631轮胎规格225/55R17图1 双横臂独立悬架图2 多连杆悬架图3 整车模型2 脉冲输入仿真2.1 脉冲输入的建立利用ADAMS/Car对汽车通过脉冲路面的振动进行分析时,可以使用插件Road Builder对脉冲路面进行3D建模,也可以使用后缀名为.rdf的TeimOrbit格式路面文件进行2D或3D路面的创建。

ADAMS脉冲平顺性仿真问题小结一、问题的提出现由于需要根据平顺性能来匹配减震器,而不是简单的评价整车平顺性的好坏,所以对平顺性仿真提出了比以往更高的要求:不仅最大加速度要与实验数据相符,而且仿真的振动波形也应正确——其振动加速度的时间历程,都可以在物理上得以解释,不一定与实验中的波形相符的很好,但其误差可以得以较为准确的判断。
这样好为后续的评价和优化工作做准备。
图1为孙胜利师兄在其毕业论文《位移相关减震器动力学建模及对车辆性能影响的研究》中,对于脉冲平顺性仿真结果(障碍物为国标中三角凸块,我们采用的也是这种工况,详细内容可参见论文72页)。
我们认为,此仿真结果很理想,与简单的分析结果没有大的出入,也没有在物理上解释不了的振动。
图1 模型未知车速20km/h 步长未知二、关于此类工况下振动的简单分析现就图1中所示的振动,进行简单的分析:1、第一阶段:经过一段平路后,前轮接触到凸块,产生向上的加速度,在重力的作用下,产生了向下的加速度,表现为一个波峰和一个波谷。
2、第二阶段:前轮着地,在重力、弹簧力和阻尼力的综合作用下,产生欠阻尼的衰减振动。
在这里要提到两点:a)一般来说,damper的压缩阻尼都要小于其复原阻尼;b)这一过渡阶段的长短取决于轴距和车速,如果车速较高这个阶段会消失。
3、第三阶段:后轮接触到凸块,产生向上的加速度,在重力的作用下,产生了向下的加速度,表现为一个波峰和一个波谷。
4、第四阶段:后轮着地,在重力、弹簧力和阻尼力的综合作用下,产生欠阻尼的衰减振动,最后整体趋零。
另外,从能量的角度分析,一、三阶段为能量输入阶段,二、四阶段为能量耗散阶段,所以二、四阶段的振动幅值应小于相应的前一阶段。
图1所示的仿真结果与以上的分析没有矛盾,即其振动波形在物理上是可以解释的,所以我们认为其仿真效果是理想的。
最后,我们在这里主要是考察整车质心处的acc_normal。
我们认为,在凸块形状一定且的情况下,其时间历程仅与车速、前/后轮的载荷、等效spring刚度和等效damper阻尼有关,而与悬架类型无关。
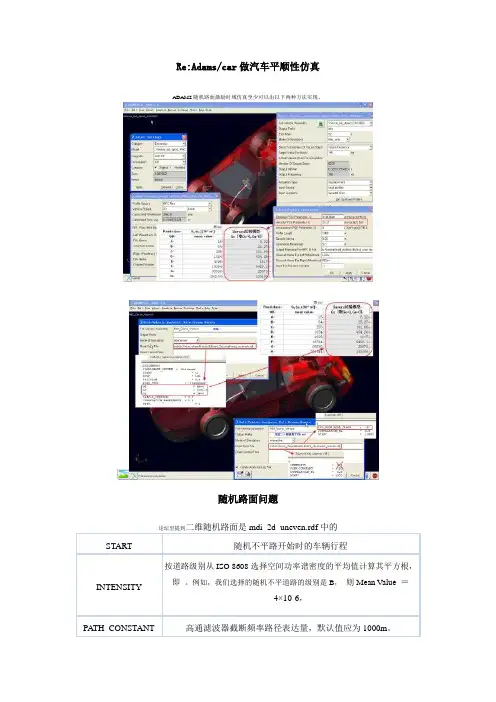
Re:Adams/car做汽车平顺性仿真ADAMS随机路面激励时域仿真至少可以由以下两种方法实现。
随机路面问题并且表 ISO 8608道路分级标准但是国标GB7031-86中请问,这两个有什么区别,到底用哪个?其二,功率谱密度的单位是m^3,而mdi_2d_uneven.rdf中的单位是mm,那么计算出来的结果应该是什么单位呢?还是某某g?做平顺性加速仿真的问题如题,做匀速仿真,将路面文件mdi_2d_uneven.rdf的INTENSITY 修改= 0.002,其他没有改动,然后按下图输入参数,最后得到的质心垂直加速度确很奇怪,入图,我用的是自带模版,将轮胎换成了fiala01,请教这是哪里问题,谢谢$---------------------------------------------------------------------MDI_HEADER[MDI_HEADER]FILE_TYPE = 'rdf'FILE_VERSION = 5.00FILE_FORMA T = 'ASCII'(COMMENTS){comment_string}'stochastic style road description'$--------------------------------------------------------------------------UNITS[UNITS]MASS = 'kg'LENGTH = 'mm'TIME = 'sec'ANGLE = 'degree'FORCE = 'newton'$--------------------------------------------------------------------------MODEL[MODEL]METHOD = '2D'FUNCTION_NAME = 'ARC901'ROAD_TYPE = 'stochastic_uneven'$---------------------------------------------------------------------PARAMETERS[PARAMETERS]OFFSET = 0ROTA TION_ANGLE_XY_PLANE = 180MU = 1.0$INTENSITY = 0.002PA TH_CONSTANT = 20CORRELA TION_RL = 0.8START = 1000附件bb.jpg (51.44 KB)2008-4-14 13:06aa.jpg (52.88 KB)可能是一点小扰动吧,因为INTENSITY = 0.002的路面太平坦了,所以加速度很小0.002是B级路面,关键是怎么会突然出现峰值呢,我做的是随机输入啊今天将final throttle和Duration step的值改成50 50就好了,但不知道这个节气门参数是怎么影响结果的,请指教intesnsity: 随机输入白噪声的功率throttle:个人理解我节气门,或者是与节气门开度有关GB_B_Class随机路面激励rdf文件定义[stochastic_uneven]方法一:$INTENSITY = 0.002PA TH_CONSTANT = 1000000CORRELA TION_RL = 0.8START = 10000方法二:$ISO_8608_ROAD_CLASS = 'B'CORRELA TION_RL = 0.8START = 10000八级路面(ABCDEFGH)定义见附件[attach]158815[/attach]。
基于ADAMS的提升桥式重型汽车平顺性仿真分析随着自动化技术和物流业的发展,重型汽车在物流领域有着越来越重要的地位,但是重型汽车在行驶过程中会产生较大的震动和噪音,这会影响驾驶员的安全感和舒适感,同时还会损害货物的质量和运输器具的寿命。
因此,提高重型汽车的平顺性具有重要的意义。
本文主要基于ADAMS对重型汽车的平顺性进行仿真分析,以探索提高重型汽车平顺性的方式和方法。
1. 建立ADAMS模型首先,根据重型汽车的实际尺寸和结构,建立ADAMS模型,包括汽车底盘、悬挂系统、车架和车轮等部件。
考虑到重型汽车在行驶过程中会受到不同的路段和路面条件的影响,因此,需要将不同的路面类型和坡度等因素纳入模型中,以更加真实地反映重型汽车的运行情况。
2. 分析重型汽车的震动特性使用ADAMS提供的分析工具,对建立的模型进行分析,得到重型汽车在不同路面条件下的振动特性,包括各部件的加速度、速度和位移等。
分析结果显示,在不同类型的路面上,重型汽车的振动情况存在较大的差异,而且重型汽车的车轮和车架是主要振动源。
3. 优化悬挂系统参数为了降低车轮和车架的振动,可以通过优化悬挂系统的参数来改善重型汽车的平顺性。
通过对悬挂系统的弹簧和减震器等参数进行调整,可以使汽车在行驶过程中对路面的反应更加柔软和精准,从而降低车身的震动。
仿真结果表明,在优化后的悬挂系统下,重型汽车的平顺性得到了明显的提升,车身的振动幅度和频率均有所减少。
4. 分析优化效果通过对比不同参数组合下的仿真结果,可以量化优化效果,并确定最优方案。
仿真结果表明,在优化后的悬挂系统下,重型汽车的平顺性得到了显著的提升,车身振动的幅度和频率均较之前大幅降低,同时车辆在不同类型的路面上都具有更好的稳定性和灵敏度。
综上,本文利用ADAMS软件对重型汽车平顺性进行了仿真分析,并通过优化悬挂系统参数的方法,实现了重型汽车平顺性的提升。
这对于优化物流行业的运输方式,提高重型汽车的安全性和运输效率,促进经济的可持续发展具有积极的意义。
**********************************************************************************************************************************************************++++基于ADAMS 软件的汽车平顺性仿真分析隗寒冰邓楚南何文波(武汉理工大学汽车学院,武汉430070)SimuIation of the vehicIe ride comfort based on the ADAMSKUI Han -bing,DENG Chu -nan,HE Wen -bo (Wuhan Unirersity of Technology,Wuhan 430070,China )1利用ADAMS 建立整车模型整车参数如表1所示,定位参数在三坐标仪上获得;车身由一般样条曲面简化表示,只需输入该车型迎风面积,系统即可自动计算空气阻力。
表1整车参数1.1建立前悬架模型[1]该车型前悬架采用麦弗逊悬架结构,由下摆臂、转向节总成(包括减振器下体、轮毂轴、制动底板等)、转向横拉杆、减振器上体、转向器齿条、车轮总成、车身共7个刚体组成。
减振器上体用万向节铰与车身相连,转向节总成与减振器上体用圆柱铰约束,相对减振器上半部分可以进行轴向移动和转动;下摆臂一端通过转动铰与车身相连(其中一个为虚约束),可相对车身上下摆动,另一端通过球铰与转向节总成相接;转向横拉杆一端通过球铰与转向节总成相连,另一端通过万向节铰与转向齿条相连;转向齿条通过移动铰与车身相连,可相对车身左右移动;车轮总成和转向节总成通过转动铰链相连。
图1所示为在ADAMS /Car 中建立的1/2麦弗逊前悬架模型。
1.2建立轮胎模型[3]ADAMS /Car 提供了四种用于动力学仿真计算的轮胎模型。
即默认的Fiala 模型,UA 模型、Smithers 模型、DELFT 模型,此外还可由用户自定义模型。
ADAMS脉冲平顺性仿真问题小结
一、问题的提出
现由于需要根据平顺性能来匹配减震器,而不是简单的评价整车平顺性的好坏,所以对平顺性仿真提出了比以往更高的要求:不仅最大加速度要与实验数据相符,而且仿真的振动波形也应正确——其振动加速度的时间历程,都可以在物理上得以解释,不一定与实验中的波形相符的很好,但其误差可以得以较为准确的判断。
这样好为后续的评价和优化工作做准备。
图1为孙胜利师兄在其毕业论文《位移相关减震器动力学建模及对车辆性能影响的研究》中,对于脉冲平顺性仿真结果(障碍物为国标中三角凸块,我们采用的也是这种工况,详细内容可参见论文72页)。
我们认为,此仿真结果很理想,与简单的分析结果没有大的出入,也没有在物理上解释不了的振动。
图1 模型未知车速20km/h 步长未知
二、关于此类工况下振动的简单分析
现就图1中所示的振动,进行简单的分析:
1、第一阶段:经过一段平路后,前轮接触到凸块,产生向上的加速度,在重力的作用下,产生了向下的加速度,表现为一个波峰和一个波谷。
2、第二阶段:前轮着地,在重力、弹簧力和阻尼力的综合作用下,产生欠阻尼的衰减振动。
在这里要提到两点:a)一般来说,damper的压缩阻尼都要小于其复原阻尼;b)这一过渡阶段的长短取决于轴距和车速,如果车速较高这个阶段会消失。
3、第三阶段:后轮接触到凸块,产生向上的加速度,在重力的作用下,产生了向下的加速度,表现为一个波峰和一个波谷。
4、第四阶段:后轮着地,在重力、弹簧力和阻尼力的综合作用下,产生欠阻尼的衰减振动,最后整体趋零。
另外,从能量的角度分析,一、三阶段为能量输入阶段,二、四阶段为能量耗散阶段,所以二、四阶段的振动幅值应小于相应的前一阶段。
图1所示的仿真结果与以上的分析没有矛盾,即其振动波形在物理上是可以解释的,所以我们认为其仿真效果是理想的。
最后,我们在这里主要是考察整车质心处的acc_normal。
我们认为,在凸块形状一定且的情况下,其时间历程仅与车速、前/后轮的载荷、等效spring刚度和等效damper阻尼有关,
而与悬架类型无关。
三、仿真中出现的问题
在实际仿真中,我们发现仿真结果与上面所分析的内容有矛盾,主要有三种问题。
问题1,如图2所示,蓝圈A所标出的部分:在非平衡位置(这里是向下加速度到达峰值处)出现了振动,在物理上我们无法解释。
图2 吉利远景车车速80km/h 1000步/秒
问题2,如图2所示,蓝圈B所标出的部分:在后轮接触凸块后到达第三阶段,而后进入第四阶段。
但是我们注意到,第四阶段开始时的波峰很小,但是波谷较大,甚至比第三阶段的波谷都大。
从能量的观点看,这是无法解释的。
问题3,如图3所示,蓝框A所标出的部分:在第四阶段,振动没有较为快速的收敛,而是出现了比较奇异的振动形态。
图3吉利远景车车速50km/h 500步/秒
前面所提到仿真模型是公司数据库中提供的吉利远景车的模型,车辆的各项参数包括轴距、轮距、K&C特性、减震器特性、弹簧特性等,都是由厂家提供的,并使用了ADAMS 自带的Ftire轮胎模型。
我们又对另一整车模型zqing和ADAMS中Demo车模型进行了类似的仿真实验,也发现了类似的问题,如图4、5所示。
图4 中气车模型车速60km/h 1000步/秒
图5 Demo车模型车速20km/h 1000步/秒、2000步/秒
四、有关问题的分析
对于前面所提到的问题,我们进行了一些分析和相关实验。
这里需要说明的是,我们没有找到较为详细深入介绍平顺性仿真的文献,来解决所发现的问题。
我们分析的主要依据是ADAMS.Help和《MSC.ADAMS技术与工程分析实例》所提供的一些信息。
对于问题3,我们可以较为容易的判断,其异常振动是由数值计算产生的。
我们首先想到是,此问题可能与积分器和仿真步长有关。
根据《MSC.ADAMS技术与工程分析实例》所提供的内容,我们没有发现比默认积分器更好的设置方案,所以,我们力图调整仿真步长来改善仿真结果。
Excel文档《整车脉冲平顺性仿真分析》中,详细的介绍了这一过程。
我们发现,仿真结果确实与步长有关:
1)会有一些较为合适的步长与不同的车辆行驶速度相对应,即合理的仿真步长与车辆
的行驶速度有关;
2)根据《MSC.ADAMS技术与工程分析实例》中对于Ftire轮胎模型的阐述,我们尽
量把步长取小(即把步数取多),但如果把步长取得过小,会出现异常的高频振动;
3)调整步长,并没有解决前面提到的三个问题,随着车速的增加而变得严重,这也从
侧面证实了ADAMS整车模型在高频激励下的仿真确实存在问题。
ADAMS.Help中提到ADAMS在多柔体仿真时存在问题,所以我们又猜测问题的产生可能与模型中的柔体有关。
在吉利远景模型中,我们调整了前后稳定杆和扭转梁的模态,发现仿真结果变化很小;在中气车模型中,我们调整了纵臂的模态,发现对于振动的波峰波谷有较大的影响,如图6所示当将其置为刚体时幅值相差了20%,但基本波形变化不大——
两个结果的不同,主要与悬架形式有关,在本文的最后,附有两种车型的悬架形式。
图6 中气车模型车速40km/h 1000步/秒mm40中将纵臂置为刚体
至此,以我们现阶段的能力没有能够解决所遇到的问题,并有一些猜想和疑问:
1)前面所提到的三种问题,猜想是由于数值计算产生的,而与整车模型模型关系不大:模型参数(包括柔性体的模态)应该只是影响振动的幅值、相位和振动衰减速度,而不会产生无法在物理上解释的“异常”振动;
2)如果是由于数值计算产生的,那么应该怎样调整仿真参数使得仿真结果得以改善呢?对于仿真步长的影响,我们做了较为详细的讨论,没有得到满意的结论;至于其他的仿真参数,我们没有找到合理的调整方案,主要也是因为对于ADAMS的内部算法知之甚少;
3)脉冲平顺性实验,对于多体系统仿真来说,应该是非常恶劣的工况,是否ADAMS 本身并没有很好的解决这个问题,换言之现阶段关注acc_normal的时间历程是没有意义的?在大多数文献中,只是把最大加速度的绝对值与实验值进行对比;但是在孙胜利的《位移相关减震器动力学建模及对车辆性能影响的研究》论文中的仿真波形是很理想的。
对于仿真的误差,是否能有办法给予估计和修正?
附件
图7 吉利远景前、后悬架结构图
图8 中气车前、后悬架结构图。