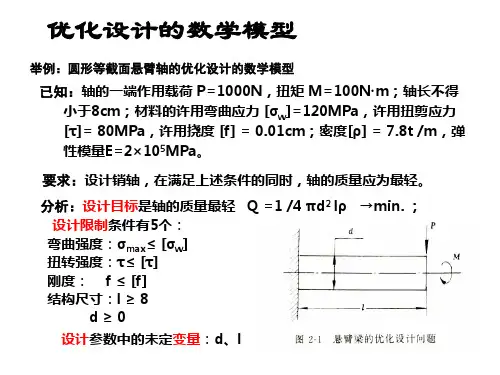
优化设计的数学模型及基本要素
- 格式:doc
- 大小:361.50 KB
- 文档页数:8
作业1. 阐述优化设计数学模型的三要素。
写出一般形式的数学模型。
答:建立最优化问题数学模型的三要素:(1)决策变量和参数。
决策变量是由数学模型的解确定的未知数。
参数表示系统的控制变量,有确定性的也有随机性的。
(2)约束或限制条件。
由于现实系统的客观物质条件限制,模型必须包括把决策变量限制在它们可行值之内的约束条件,而这通常是用约束的数学函数形式来表示的。
(3)目标函数。
这是作为系统决策变量的一个数学函数来衡量系统的效率,即系统追求的目标。
2. 阐述设计可行域和不可行域的基本概念答:约束对设计点在设计空间的活动范围有所限制。
凡满足所有约束条件的设计点,它在设计空间中的可能活动范围,称可行设计区域(可行域)。
不能满足所有约束条件的设计空间便是不可行设计区域(不可行域)。
3、无约束局部最优解的必要条件?答: (1)一元函数(即单变量函数) 极值点存在的必要条件如果函数f (x )的一阶导数f’(x )存在的话,则欲使x *为极值点的必要条件为: f’(x *)=0但使f’(x *)=0的点并不一定部是极值点;使函数f (x )的一阶导数f’(x )=0的点称为函数f (x )的驻点;极值点(对存在导数的函数)必为驻点,但驻点不一定是极值点。
至于驻点是否为极值点可以通过二阶导数f’’(x )=0来判断。
(2)n 元函数在定义域内极值点X *存在的必要条件为即对每一个变量的一阶偏导数值必须为零,或者说梯度为零(n 维零向量)。
▽f (X*)=0是多元函数极值点存在的必要条件,而并非充分条件;满足▽f (X*)=0的点X *称为驻点,至于驻点是否为极值点,尚须通过二阶偏导数矩阵来判断。
3. 阐述约束优化问题最优解的K-T 条件。
答:K-T 条件可阐述为:如果X (k)是一个局部极小点,则该点的目标函数梯度▽f (X (k))可表示成该点诸约束面梯度为▽g u (X (k))、▽h v (X (k))的如下线性组合:()()()()0****21=⎥⎦⎤⎢⎣⎡∂∂∂∂∂∂=∇T n x X f x X f x X f X f式中:q —在X (k)点的不等式约束面数;j —在X (k)点的等式约束面数;λu (u =1,2,…q )、μv (v =1,2,…j )——非负值的乘子,亦称拉格朗日乘子。
1.优化设计问题的求解方法:解析解法和数值近似解法。
解析解法是指优化对象用数学方程(数学模型)描述,用数学解析方法的求解方法.解析法的局限性:数学描述复杂,不便于或不可能用解析方法求解。
数值解法:优化对象无法用数学方程描述,只能通过大量的试验数据或拟合方法构造近似函数式,求其优化解;以数学原理为指导,通过试验逐步改进得到优化解。
数值解法可用于复杂函数的优化解,也可用于没有数学解析表达式的优化问题.但不能把所有设计参数都完全考虑并表达,只是一个近似的数学描述。
数值解法的基本思路:先确定极小点所在的搜索区间,然后根据区间消去原理不断缩小此区间,从而获得极小点的数值近似解。
2.优化的数学模型包含的三个基本要素:设计变量、约束条件(等式约束和不等式约束)、目标函数(一般使得目标函数达到极小值)。
3.机械优化设计中,两类设计方法:优化准则法和数学规划法。
优化准则法:(为一对角矩阵)数学规划法:(分别为适当步长\某一搜索方向——数学规划法的核心)4.机械优化设计问题一般是非线性规划问题,实质上是多元非线性函数的极小化问题。
重点知识点:等式约束优化问题的极值问题和不等式约束优化问题的极值条件.5.对于二元以上的函数,方向导数为某一方向的偏导数。
函数沿某一方向的方向导数等于函数在该点处的梯度与这一方向单位向量的内积。
梯度方向是函数值变化最快的方向(最速上升方向),建议用单位向量表示,而梯度的模是函数变化率的最大值。
6.多元函数的泰勒展开。
海赛矩阵:=(对称方阵)7.极值条件是指目标函数取得极小值时极值点应满足的条件.某点取得极值,在此点函数的一阶导数为零,极值点的必要条件:极值点必在驻点处取得.用函数的二阶倒数来检验驻点是否为极值点。
二阶倒数大于零,取得极小值。
二阶导数等于零时,判断开始不为零的导数阶数如果是偶次,则为极值点,奇次则为拐点。
二元函数在某点取得极值的充分条件是在该点出的海赛矩阵正定。
极值点反映函数在某点附近的局部性质。

1.优化设计数学模型的三要素是什么?试写出其数学表达式。
2.常用的迭代终止准则有哪些?(1)点距准则 ||Xk+1-Xk||≤ε(2)值差准则 |f(Xk+1)-f(Xk)|≤ε(3)梯度准则 ||▽ f(Xk+1) ||≤ε3.设计的变量和设计空间的关系是什么?由n个设计变量x1,x2,…xn为坐标所组成的实空间称作设计空间。
4.梯度和方向导数的关系是什么?梯度▽ F(X) 是一个向量,梯度方向是函数具有最大变化率的方向(方向导数最大的方向)。
5.如何判断矩阵的正定性?若有HTHX>0,则称矩阵H是正定矩阵;矩阵A正定的条件是A的各阶主子式大于零。
6.为什么说正定二次函数在最优化理论中具有特殊意义?因为许多最优化理论和最优化方法都是根据正定二次函数提出并加以证明的,而且所有对正定二次函数适用并有效的最优化算法,经证明,对一般非线性函数也是适用和有效的。
7.什么是库恩-塔克条件?其几何意义又是什么?等式约束:不等式约束:8.为什么二次插值法的收敛速度要比黄金分割法快?而在相同τ下的实际精度没有黄金分割法高?9.试写出梯度法(最速下降法)的迭代算法公式,并简要叙述该算法的特点。
公式:方法特点:1)初始点可任选,每次迭代计算量小,存储量少,程序简短。
即使从一个不好的初始点出发,开始的几步迭代,目标函数值下降很快,然后慢慢逼近局部极小点;2)任意相邻两点的搜索方向是正交的,它的迭代路径为绕道逼近极小点。
当迭代点接近极小点时,步长变得很小,越走越慢。
梯度法只具有线性收敛速度。
10.梯度法计算速度慢的原因是什么?为什么一些好的算法第一步迭代都以负梯度作为搜索方向?在迭代点向函数极小点靠近的过程,走的是曲折的路线,形成“之”字形的锯齿现象,而且越接近极小点锯齿越细。
11.牛顿方向如何得到?有何优点?12.共轭方向如何产生?有何优点?13.线性规划的基本解、基本可行解和最优解之间有什么关系?14.在解的转换中,如何保证目标函数值不仅下降,而且下降的最多?15.非线性约束最优化问题的求解方法有哪两类?各有什么特点?16.约束优化方法中的可行方向法产生可行方向应满足什么条件?试用文字描述并用公式表达。

优化设计数学模型的建立是一个复杂的过程,需要综合考虑问题的各个要素,将实际的问题抽象化,并转化为数学语言。
以下是一个基本的步骤和要点:
1. 明确问题:首先,需要明确优化设计的目标。
这可能涉及到最小化成本、最大化效益、优化性能等。
同时,也要明确约束条件,例如资源限制、时间限制、技术限制等。
2. 建立数学模型:将问题抽象化,用数学符号和公式来表示问题。
这通常涉及到变量(决策变量)、函数(目标函数)和约束条件。
例如,在最小化成本的问题中,可以将成本作为目标函数,各种影响成本的因素作为决策变量,而技术、资源等限制作为约束条件。
3. 选择合适的数学工具:根据问题的性质,选择合适的数学方法和算法。
例如,线性规划、非线性规划、整数规划、动态规划等。
这些方法和算法可以帮助解决各种复杂的优化问题。
4. 参数化和数据收集:根据建立的模型,需要收集相关的数据和参数。
这些数据和参数应该能够支持模型的建立和验证。
5. 模型验证:在模型建立后,需要进行验证以确保其准确性和有效性。
这可以通过对比历史数据、进行模拟实验或与其他模型进行比较来完成。
6. 模型实施与优化:一旦模型通过验证,就可以开始实施优化方案。
在实施过程中,可能需要对模型进行持续的优化和调整,以适应不断变化的情况和新的数据。
通过以上步骤,可以建立一个有效的优化设计数学模型,为决策提供科学依据,提高设计的效率和效果。
《优化设计》知识要点1) 机械优化设计的一般步骤。
2) 优化设计问题的数学模型的三要素。
数学模型的一般形式。
会对简单的优化设计问题建立数学模型,注意标准格式及完整约束。
3) 优化算法三要素、求解优化问题的基本迭代格式及每一迭代步的核心问题、算法终止三个判断准则。
4) 多元函数的梯度求法及其几何意义。
5) 会判断函数的凸性。
(海色矩阵半正定)6) 无约束优化问题的极值条件( 充分条件和必要条件),特别是海色矩阵计算及正定性判别。
7) 何为库恩一塔克(K-T)条件?其几何意义是什么?会用库恩一塔克条件判定某点是否为约束极值点。
8) 何为一维搜索?简述一维搜索的一般过程及基本方法。
熟练掌握进退算法,要求能手算,注意步长加速与端点置换。
9) 熟练掌握黄金分割法的迭代公式及计算过程,要求能手算。
10)无约束优化迭代算法分成哪两类?各是什么含义?每类有那些学过的算法?11)坐标轮换法、鲍威尔法属于什么类别无约束优化算法?搜索过程怎样?能手工计算实现前1、2步的迭代过程。
12)梯度法、牛顿法属于什么类别无约束优化算法?各自的搜索方向如何计算?能手工计算实现前几步的迭代过程。
注意海色矩阵逆矩阵的手工计算方法。
算法的二次收敛性是什么含义?学过的无约束优化算法中,哪两个具有二次收敛性?变尺度法主要解决什么问题?13)要能从搜索路径上辨别出以上所述算法,能从通用、效率、简便三个方面比较以上算法。
14)何为两个矢量共轭、正交,如何判断?15)约束优化迭代算法分成哪两类?各是什么含义?每类有那些学过的算法?16)坐标轮换法在约束优化问题与无约束优化问题的区别?步长求法、收敛准则各是什么?17)复合形法实现过程。
要能从图形上判别出复合形法的移动过程。
18)内点法和外点法是如何构造其惩罚函数的?各自的应用范围、对初始点的要求以及惩罚因子的取值要求。
机械优化设计期末复习题及答案一、填空题1.组成优化设计数学模型的三要素是 设计变量 、 目标函数 、 约束条件 。
2.函数()22121212,45f x x x x x x =+-+在024X ⎡⎤=⎢⎥⎣⎦点处的梯度为120-⎡⎤⎢⎥⎣⎦,海赛矩阵为2442-⎡⎤⎢⎥-⎣⎦3.目标函数是一项设计所追求的指标的数学反映,因此对它最基本的要求是能用来评价设计的优劣,,同时必须是设计变量的可计算函数 。
4.建立优化设计数学模型的基本原则是确切反映 工程实际问题,的基础上力求简洁 。
5.约束条件的尺度变换常称 规格化,这是为改善数学模型性态常用的一种方法。
6.随机方向法所用的步长一般按 加速步长 法来确定,此法是指依次迭代的步长按一定的比例 递增的方法。
7.最速下降法以 负梯度 方向作为搜索方向,因此最速下降法又称为 梯度法,其收敛速度较 慢 。
8.二元函数在某点处取得极值的必要条件是()00f X ∇= , 充分条件是该点处的海赛矩阵正定9.拉格朗日乘子法的基本思想是通过增加变量将等式约束 优化问题变成 无约束优化问题,这种方法又被称为 升维 法。
10改变复合形形状的搜索方法主要有反射,扩张,收缩,压缩11坐标轮换法的基本思想是把多变量 的优化问题转化为 单变量 的优化问题12.在选择约束条件时应特别注意避免出现 相互矛盾的约束, ,另外应当尽量减少不必要的约束 。
13.目标函数是n 维变量的函数,它的函数图像只能在n+1, 空间中描述出来,为了在n 维空间中反映目标函数的变化情况,常采用 目标函数等值面 的方法。
14.数学规划法的迭代公式是 1k k k k X X d α+=+ ,其核心是 建立搜索方向, 和 计算最佳步长 。
15协调曲线法是用来解决 设计目标互相矛盾 的多目标优化设计问题的。
16.机械优化设计的一般过程中, 建立优化设计数学模型 是首要和关键的一步,它是取得正确结果的前提。
第2章 优化设计的数学模型及基本要素Chapter 2 Mathematical Modeling for Optimization2-1 数学模型的建立 (mathematical modeling)建立数学模型,就是把实际问题按照一定的格式转换成数学表达式的过程。
数学模型建立的合适、正确与否,直接影响到优化设计的最终结果。
建立数学模型,通常是根据设计要求,应用相关基础和专业知识,建立若干个相应的数学表达式。
如机械结构的优化设计,主要是根据力学、机械设计基础等专业基础知识及机械设备等专业知识来建立数学模型的。
当然,要建立能够反映客观实际的、比较准确的数学模型并非容易之事。
数学模型建的过于复杂,涉及的因素太多,数学求解时可能会遇到困难;而建的太简单,又不接近实际情况,解出来也无多大意义。
因此,建立数学模型的原则:抓主要矛盾,尽量使问题合理简化。
Principle :The problem is simplified as much as possible.由于设计对象千变万化,即使对同一个问题,由于看问题的角度不同,数学模型建的可能也不一样。
建立数学模型不可能遵循一个不变的规则,本课也不准备把大量的时间花在数学模型的建立上。
仅想以几个例子来演示一下数学模型的建立过程,使学生从中得到一些启发。
Exp. 2-1例2-1 用宽度为cm 24,长度cm 100的薄铁皮做成cm 100长的梯形槽,确定折边的尺寸x 和折角θ(如图 2-1所示),使槽的容积最大。
解: 由于槽的长度就是板的长度,槽的梯形截面积最大就意味着其容积最大。
因此,该问题就由,求体积最大变成求截面积最大。
槽的梯形截面积为: 图 2-1⨯=21S 高 ⨯(上底边+下底边) 其中,上底边=x 224-;下底边=θcos 2224x x +-;高=θsin x 定义:该优化设计问题的目标函数是槽的梯形截面积S ,设计变量为θ,x 。
问题可以简单地归结为:选择适当的设计变量θ,x ,在一定的限制条件下,使目标函数S 达到最大,限制条件为: 120,20<<<<x πθExp. 2-2例2-2 如图 2-2所示是一根简化了的机床主轴。
在设计这根轴时,有二个重要因素需要考虑,主轴的重量和外伸端的扰度。
对于加工精度要求不高的普通机车而言,以选取主轴重量最轻为优化设计的目标,外伸端的扰度可以作为限制条件来考虑。
图 2-2解: 当主轴的材料选定后,其重量仅与四个量有关。
轴的内经d ,外经D ,支撑间的跨距l 及外伸端a 。
由于机床主轴的内孔是用来通过待加工的棒料,其大小由机床型号决定,不能选作设计变量。
因此,该问题的设计变量取 a D l ,,;目标函数,即主轴的重量为))((4122d D a l f -+=πρ ;主轴的限制条件,取它的刚度条件,即外伸端的扰度小于某一规定值 }[y y c ≤及尺寸。
在外力F 作用下,外伸端的扰度为EJa l Fa y c 3}(2+= 其中,)(6444d D J -=π。
因此,主轴的刚度约束为][3}(2y EJ a l Fa ≤+。
它的尺寸约束为101010,,a a a D D D l l l ≤≤≤≤≤≤。
Exp. 2-3 (p8)例2-3 如图 2-3所示,钢梁C 的一端与刚性支撑B 焊接在一起,另一端承受作用力6000N 。
最优的设计钢梁尺寸,使梁的重量最轻。
图 2-3解: 钢梁包括梁本身及焊缝,选择独立的设计变量为尺寸,,h l t 和b ,并给定长度 1.4L m =。
用{}{}1234T TX x x x x h l t b ==表示设计变量。
钢梁的总重量,即目标函数为 c w V V V =+其中,C V -- 梁C 的体积,立方英寸;W V -- 焊缝的体积,立方英寸。
从图上看,它们的体积分别是()C V tb L l =+2212()2W V h l h l ==所以,总重量为 2()V tb L l h l =++ → 234212()()f X x x L x x x =++对于焊接钢梁的限制条件有(1)焊接应力 ()X τ焊接应力由二部分组成,()'''X τττ=+,其中,'''MR J ττ= M --F 产生的扭矩,2[(/2)]M F L x =+;J -- 极惯性矩,222311220.707[()122x x x J x x ⎧⎫+=+⎨⎬⎩⎭; 1222231[]42x x x R ⎧⎫+=+⎨⎬⎩⎭(2)弯曲应力()X σ最大的弯曲应力为 2436()FL X x x σ= (3)失稳临界载荷 ()C P X当 34/t b x x = 值变大,即梁变薄时,会出现失稳的趋势。
对于矩形梁,失稳临界载荷近似地表示成()C P X 其中,E -- 杨氏模量;334112I x x =;33413Gx x α=,G -- 剪切模量 (4)梁的变形()X δ假定钢梁是长L 的简支梁,其变形是 33344()FL X Ex x δ=上面四种约束,加上尺寸约束表示如下 1234142536718()()0()()0()0()0()0()()0()0.1250()0.25()0d d c g X X g X X g X x x g X x g X x g X P X F g X x g X X ττσσδ=-≥=-≥=-≥=≥=≥=-≥=-≥=-≥Exp. 2-4例2-4 某工厂生产B A ,二种产品。
产品A 每件需用材料kg 9,3个工时和h kw .4电,产值为60元;产品B 每件需用材料kg 4,10个工时和h kw .5电,产值为120元;若每天可提供材料kg 300,300个工时和h kw .200电,问每天生产B A ,产品各多少件,获得的总产值才能最大?解: 这是一个生产计划的优化问题。
假设每天生产A 产品1x 件,B 产品2x 件,在材料、工时和电力供应量的限制下,求21,x x 的值,使总产值最大。
该优化问题的设计变量为 1x 和2x ;目标函数为 m ax 1206021→+=x x f满足限制条件 材料 3604921≤+x x工时 30010321≤+x x电力 2005421≤+x x2-2 数学模型的三要素及一般形式无论什么样的优化设计问题,尽管其物理概念不同,但数学模型一般均由设计变量、目标函数和约束条件组成,称其为三要素。
2-2-1 设计变量 (Design Variable )1) 设计变量在机械设计中,一个零件、部件或是一台设备的设计方案,通常是由一组基本参数来 确定和表示的。
在设计中,选择哪些参数表示一个设计方案,需要根据各种设计问题的性质来定。
有的可以用几何参数,如零件的外形尺寸、截面尺寸、机构的运动学尺寸等;有的可用某些物理量,如构件的重量、惯性距、频率、力和力矩等;还有的可用一些代表工作性能的导出量,如应力、扰度、冲击系数等。
总之,这些基本参数是对设计指标性能好坏有直接影响的量。
在设计中,有些基本参数可以根据设计要求事先给定,称为设计常数,如弹模、许用应力等材料特性等。
而有些则需要通过在设计过程中进行调整、优选来定,如尺寸等。
对于需要优选的参数,在设计过程中均把它们看作是变化的量,称为设计变量。
应注意,设计变量一定是独立参数(Variables must be independent ),任何导出量不能作为设计变量(如式21z z i =中只能取三个量中的二个作为设计变量)。
设计变量有连续变量和离散变量二种形式(Continuous & Dispersive Variable )。
大多数机械优化设计中的设计变量都是连续变量,可以用常规的优化算法来求解。
而对于像齿轮的齿数、模数、钢板的厚度等只能在一定的数集里取值的离散变量的优化设计问题,则需用特殊的优化算法。
2) 设计变量的表示对于一个优化问题,设计变量的个数则称为该问题的维数(Dimension ),用一数组X 或向量表示:(n-dimensional vectors ){}T n n x x x x x x X 2121=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=以n 个设计变量为坐标轴张成的实空间称为设计空间 (Design Space ),用nR 表示。
设计空间中的每一个点都对应着一个设计方案。
二个设计变量(2=n )对应的设计空间是一个平面(plan ),三个设计变量(3=n )对应的设计空间是一个三维立体空间(space )(如图 2-4所示),图 2-4当维数大于三时(3>n ),设计空间就无法用图来表示,称为超越空间(transcend space )。
3) 设计变量的选取设计空间的维数表示设计的自由度数。
设计变量越多,设计自由度就越大,可供选择 的方案就越多,容易得到比较理性的结果。
但随着设计变量数目的增多,必然会使问题复杂化,给寻优带来更大的困难。
因此,在满足基本设计要求的前提下,应尽量减少设计变量的个数,把对目标函数影响较大的那些参数选作设计变量。
但也应注意实用性,如为了选择一种最合适的材料,将材料的某些性能取为设计变量,但这样求得的最优值,从材料供应方面往往难以实现(The variables are chosen as a few as possible )。
2-2-2 目标函数 (Objective Function )1)目标函数的表示在优化设计中用于评价设计方案好坏的衡量标准(Criterion ),称为目标函数或评价函数。
它是设计变量的函数,记作 )()(21n x x x f X f =。
在工程实际中,优化设计问题的目标函数有二种形式,目标函数的极小化或极大化,即 (Maximization & Minimization )min )(→X f 或 max )(→X f其实,目标函数)(X f 的极大化就等价于)(X f -的极小化,为了统一优化算法和程序,以后最优化均指目标函数的极小化。
建立目标函数是整个优化设计中的重要环节。
在机械设计中,目标函数主要根据设计准则来建立的。
对于机构的优化设计,这个准则可以是运动学或动力学的特性,如运动误差、振动特性等;对于另部件的设计,这个准则可以是重量、体积、效率等;对于产品设计,也可以将成本、价格、寿命等作为设计追求的目标。
2)单目标和多目标优化问题 (Single- or Multi- Objective Function )在优化设计中,数学模型中仅包含一项设计准则,即目标函数的称为单目标优化问题。
同时包含若干个设计准则的就是多目标优化问题。
一般来说,目标函数越多,对设计的评价就越周全,设计的综合效果就应该越好,但对问题的求解就会越复杂。