双转子永磁同步电机的磁路建模与磁场
- 格式:pdf
- 大小:2.99 MB
- 文档页数:2

永磁同步电机转子磁障原理
永磁同步电机转子磁障原理如下:
永磁同步电机(PMSM)的转子磁障原理主要涉及永磁体在转子铁芯中的位置和极靴保护。
根据永磁体在转子铁芯中的位置,可以分为表面式和内置式PMSM。
表面式PMSM的永磁体直接暴露在气隙磁场中,容易退磁,弱磁
能力受到限制。
而内置式PMSM的永磁体埋于转子铁芯内部,表面与气隙
之间有铁磁物质的极靴保护,这使得永磁体受到极靴的保护。
在内置式PMSM中,转子磁路结构包括径向式、切向式和混合式。
径向式
转子磁路适用于高速运行场合,有效气隙较小,d轴和q轴的电枢反应电抗较大,从而存在较大的弱磁升速空间。
切向式的IPM的转子磁路结构中,
相邻两个磁极并联提供一个极距下的磁通。
此外,按照永磁体安装形式分类,可分为凸极式(SPM)和嵌入式(IPM)。
凸极式转子是将永磁体安装在转子轴的表面,产生的气隙磁密接近于正弦波,所以电机有良好的动态性能。
嵌入式转子则是将永磁铁嵌入到转子轴的内部,能够产生磁阻转矩,在控制中,可以灵活的利用磁阻转矩提高电机的动态性能。
总之,永磁同步电机转子磁障原理主要涉及永磁体的位置、极靴保护以及凸极式和嵌入式安装形式等方面。
这些因素共同作用,使得电机具有良好的动态性能和效率。
如需了解更多信息,建议咨询专业技术人员或查阅相关技术手册。


新型永磁电机转子磁路结构设计与分析方案计算中采用了二维平面电磁场时步有限元结合场路耦合的方法,采用该计算方法的优点是能够考虑机械运动、导体区域感应涡流产生的集肤效应以及绕组邻近效应的影响,通过合理的简化模型,可以获得较高的计算精度和合理的计算时间[7]。
永磁同步电机电磁场时变问题中的Maxwell方程组表达式为:(2)当考虑到电机铁芯的饱和因素,则非线性时变运动电磁场问题的偏微分方程表达式[8]为:(3)式中:A—矢量磁位;Js—外部强加的源电流密度;v—媒质的磁阻率;V—媒质相对坐标系的运动速度;—媒质的电导率。
3 电磁场仿真计算与分析根据上述分析,针对以上转子磁路结构类型,本文建立了3种磁路结构的模型,分别是表贴式、内置式和本文提出的新磁路结构。
该永磁同步电动机的定子槽数(36槽)及结构尺寸相同。
转子采用不同的磁路结构,即表贴式转子磁路结构、内置式转子磁路结构和本文提出的新型磁路结构。
转子极数为8极。
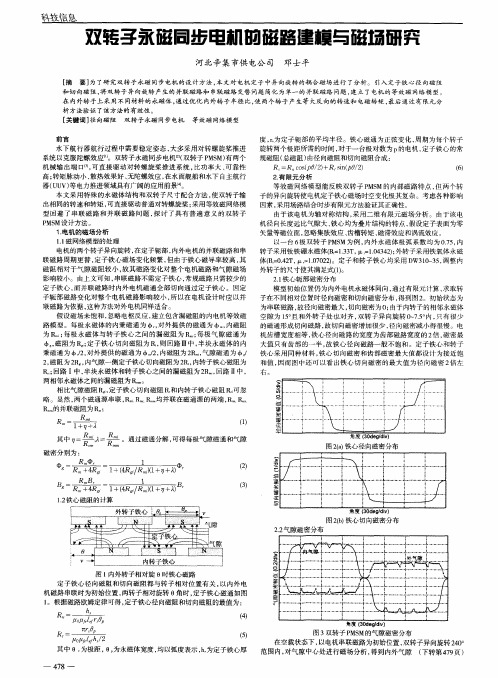
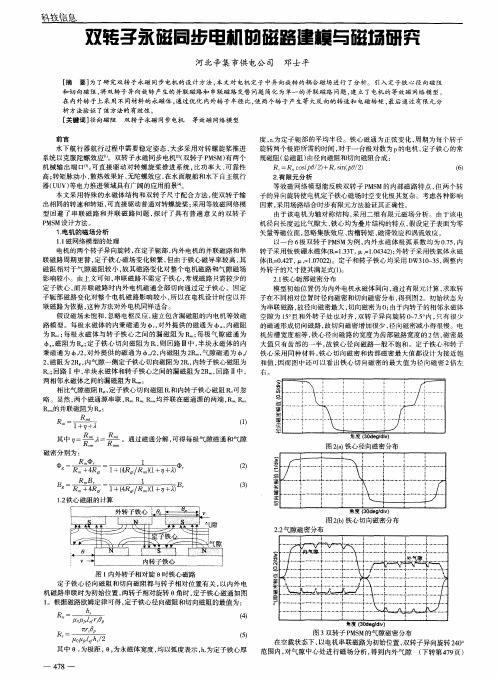
图3、图4和图5分别为表贴式转子磁路结构、内置式转子磁路结构(转子磁路為一字型结构)、以及本文提出的新型转子磁路结构。
建立有限元仿真模型后,将分别计算3种磁路结构的空载反电动势波形,电机运行转速为1 000rpm,磁钢温度20℃。
图6、图7和图8分别是表贴式转子磁路结构的空载反电动势波形、内置式转子磁路结构的空载反电动势波形和本文提出的新型转子结构的空载反电动势波形。
通过对比图6、图7和图8的有限元仿真计算结果可知,当采用本文提出的新型转子磁路结构时,电机空载反电动势波形具有更高的正弦度,谐波含量最低,其谐波畸变率约为0.3%,远小于表贴式结构的2.6%和内置式转子结构的1.1%。
在空载工况下,对3种磁路结构电机的交直轴电感进行有限元仿真分析,得到电机交、直軸电感随时间的变化波形。
计算结果如图9、图10、图11所示。
图9为表贴式转子结构的交直轴电感仿真结果。
由于表贴式电机的交直轴磁导近似相等,因此仿真曲线中交直轴电感相近,即电机的凸极率近似为1。

新型永磁电机转子磁路结构设计与分析作者:徐锋来源:《科学家》2017年第16期摘要本文提出的新型永磁同步电机转子磁路结构,能够使永磁同步电机同时具有内置式转子磁路结构和表贴式转子磁路结构的各自优点。
同时采用该磁路结构后,能够使平行充磁的转子磁钢具有等效的径向充磁效果。
并且能够增加转子的机械强度,提高电机的运行转速。
避免转子在高速运行或冲击振动过程中对磁钢的损坏。
通过对磁路结构的特殊设计,使电机的转子磁路特性接近于一般的表贴式磁钢结构,因此对电机的控制更加简单可靠;并且由于转子每极采用两片磁钢,使平行充磁的磁钢达到了径向充磁的目的,从而改善了电机反电势波形、降低了齿槽转矩。
关键词永磁同步电机;转子结构;谐波畸变率;交直轴电感中图分类号 TM34 文献标识码 A 文章编号 2095-6363(2017)16-0079-03与传统的电励磁同步电机相比,永磁同步电动机具有效率高、结构简单、体积小、重量轻的特点。
从控制角度分析,永磁同步电机的转矩特性与直流电机相似,因此,具有调速范围宽,控制系统简单、快速的优点[1]。
在新能源汽车驱动、航空航天、伺服传动等控制精度要求高、运行可靠的领域得到广泛应用。
从永磁同步电机磁钢的安装方式划分,可以将永磁同步电机分为表贴式永磁同步电机(SPM)和内置式永磁同步电机(IPM)两种[2]。
内置式永磁同步电机由于磁钢嵌在铁芯内部,转子结构更加可靠,使磁钢能够承受更高的转速和冲击。
但由于内置式转子磁路的直轴磁导小于交轴磁导,使电机的交直轴电感不相等,并且交直轴磁路具有交叉影响,大大增加了对内置式电机控制的难度,使控制系统更加复杂;表贴式永磁电机的磁钢贴在转子表面,固定方式简单,但可靠性较差。
虽然在实际应用中,可以采用绑扎等固定措施,但增加了气隙长度,影响电机的运行性能[3-4]。
本文针对两种磁路结构存在的缺点,提出了新型永磁同步电机转子磁路,该磁路结构同时具有内置式和表贴式转子磁路结构的各自优点,提升了电机的整体性能。
永磁体的模型、工作点以及永磁磁路目录永磁体的磁偶极子模型 (1)退磁曲线与内禀退磁曲线 (1)孤立永磁体的磁场、工作点 (3)永磁磁路 (4)永磁体的磁偶极子模型永磁体的基本组成单位是磁偶极子。
从磁荷的观点看,磁偶极子是一对距离为1的正负点磁荷,点磁荷的单位是Wb(类似于电荷的单位为库仑C)。
所以磁偶极子的磁偶极矩Pm的单位是Wb ∙ m。
电磁学中,定义单位体积内磁偶极矩的矢量和为磁极化强度J,即J=Σpm∕AV,这样磁极化强度J的单位是Wb ∙ m∕m3=T o有时磁极化强度J 也被称作内禀磁感应强度Bi o从分子电流的观点看,磁偶极子可以用微小的电流回路表达,它的磁矩m 分子定义为平面回路中电流和回路面积的乘积,即m分子二i∙S,单位为A∙m2. 电磁学中,定义单位体积内包含磁偶极子磁矩的矢量和为磁化强度M,即M= ∑m分子/ A V,磁化强度M的单位为A∕m o磁荷观点和分子电流观点在宏观上是等效的,磁极化强度J与磁化强度M 的关系为J=UOM。
一块永磁体可以看作为一个大的磁偶极子,它的磁偶极矩等于它包含的磁偶极子磁偶极矩的矢量和。
若永磁体的体积为V,即其磁偶极矩j=JV。
当永磁体材料确定后,充磁越饱和,磁偶极子的排列越整齐,永磁体的磁极化强度越大, 磁偶极矩也越大。
永磁体的磁矩m=MV,也符合本段论述。
退磁曲线与内禀退磁曲线描述外磁场的物理量通常是磁场强度H,在外磁场的作用下,永磁体的磁感应强度B= μ 0(H+M]= μ 0H+ μ OM= μ OH+J(公式一)。
即永磁体内部的磁感应强度等于磁极化强度J与H在真空中的作用之和。
当然理论上,因为外磁场H 与永磁体的磁化强度M都是矢量,它们之间的角度可以是随机的;不过通常它们是平行的,同向时H取正,反向时H取负,反向时的外磁场称为退磁场。
永磁体在外磁场的磁化作用下饱和充磁后,再撤消外磁场时,永磁体的磁极化强度J(内禀磁感应强度Bi)并不会因外磁场H的消失而消失,而会保持一定大小的数值,习惯上称为剩余磁感应强度Br。
双转子永磁同步电机的磁路建模和磁场分析赵锋辉【摘要】为了研究双转子永磁同步电机的设计方法,对电机定子中异向旋转的耦合磁场进行了分析.引入定子铁心径向磁阻和切向磁阻,建立电机的等效磁网络模型,将双转子异向旋转产生的并联磁路和串联磁路交替问题简化为单一的并联磁路问题,得到电机的磁场分析方法.在内外转子上采用不同材料的永磁体,通过优化内外转子半径比,使两个转子产生等大反向的转速和电磁转矩.最后通过有限元分析方法验证了这种设计方法和等效磁网络模型的有效性.【期刊名称】《电气传动自动化》【年(卷),期】2013(035)004【总页数】6页(P5-10)【关键词】双转子永磁同步电机;等效磁网络模型;径向磁阻;切向磁阻;有限元分析【作者】赵锋辉【作者单位】中国重型机械研究院有限公司,陕西西安710032【正文语种】中文【中图分类】TM3411 引言水下航行器航行过程中需要稳定姿态,大多采用对转螺旋桨推进系统以克服陀螺效应[1]。
双转子永磁同步电机[2](双转子PMSM)有两个机械输出端口[3],可直接驱动对转螺旋桨推进系统,比功率大、可靠性高;转矩脉动小、散热效果好、无陀螺效应,在水面舰船和水下自主航行器(UUV)等电力推进领域具有广阔的应用前景[4,5]。
文献[2]将双转子PMSM分解为内电机和外电机(定子内侧绕组和内转子构成内电机,定子外侧绕组和外转子构成外电机),讨论了其工作原理和电磁模型;文献[6]研究了双转子电机的电感参数、永磁电势及齿槽转矩;文献[7]对双转子永磁发电机进行了仿真和控制策略研究。
但双转子PMSM的内外电机串联磁路和并联磁路交替出现,用传统永磁电机设计方法很难兼顾。
已经研制出的样机中内外电机的转矩和转速相差较大,必须通过行星齿轮加以同步,而且须重新设计与内外转子功率匹配对转螺旋桨推进器。
本文采用特殊的永磁体结构和双转子尺寸配合方法,使双转子输出相同的转速和转矩,可直接驱动普通对转螺旋桨;采用等效磁网络模型回避了串联磁路和并联磁路问题,探讨了具有普遍意义的双转子PMSM分析方法。
(一) PMSM 的数学模型交流电机是一个非线性、强耦合的多变量系统;永磁同步电机的三相绕组分布在定子上,永磁体安装在转子上;在永磁同步电机运行过程中,定子与转子始终处于相对运动状态,永磁体与绕组,绕组与绕组之间相互影响,电磁关系十分复杂,再加上磁路饱和等非线性因素,要建立永磁同步电机精确的数学模型是很困难的;为了简化永磁同步电机的数学模型,我们通常做如下假设:1) 忽略电机的磁路饱和,认为磁路是线性的;2) 不考虑涡流和磁滞损耗;3) 当定子绕组加上三相对称正弦电流时,气隙中只产生正弦分布的磁势,忽略气隙中的高次谐波;4) 驱动开关管和续流二极管为理想元件;5) 忽略齿槽、换向过程和电枢反应等影响;永磁同步电机的数学模型由电压方程、磁链方程、转矩方程和机械运动方程组成,在两相旋转坐标系下的数学模型如下:l 电机在两相旋转坐标系中的电压方程如下式所示:其中,Rs 为定子电阻;ud 、uq 分别为d 、q 轴上的两相电压;id 、iq 分别为d 、q 轴上对应的两相电流;Ld 、Lq 分别为直轴电感和交轴电感;ωc 为电角速度;ψd 、ψq 分别为直轴磁链和交轴磁链;若要获得三相静止坐标系下的电压方程,则需做两相同步旋转坐标系到三相静止坐标系的变换,如下式所示;2d/q 轴磁链方程:其中,ψf 为永磁体产生的磁链,为常数,0f r e ωψ=,而c r pωω=是机械角速度,p 为同步电机的极对数,ωc 为电角速度,e0为空载反电动势,其值为每项绕组反电动倍;3转矩方程:把它带入上式可得:对于上式,前一项是定子电流和永磁体产生的转矩,称为永磁转矩;后一项是转 子突极效应引起的转矩,称为磁阻转矩,若Ld=Lq,则不存在磁阻转矩,此时,转矩方程为:这里,t k 为转矩常数,32t f k p ψ=; 4机械运动方程:其中,m ω是电机转速,L T 是负载转矩,J 是总转动惯量包括电机惯量和负载惯量,B 是摩擦系数;(二) 直线电机原理永磁直线同步电机是旋转电机在结构上的一种演变,相当于把旋转电机的定子和动子沿轴向剖开,然后将电机展开成直线,由定子演变而来的一侧称为初级,转子演变而来的一侧称为次级;由此得到了直线电机的定子和动子,图1为其转变过程;直线电机不仅在结构上是旋转电机的演变,在工作原理上也与旋转电机类似;在旋转的三相绕组中通入三相正弦交流电后,在旋转电机的气隙中产生旋转气隙磁场,旋转磁场的转速又叫同步转速为:60(/min)s f n r p= 1-1 其中,f —交流电源频率,p —电机的极对数;如果用v 表示气隙磁场的线速度,则有:22(/)60s p v n f mm s ττ== 1-2 其中,τ为极距;当旋转电机展开成直线电机形式以后,如果不考虑铁芯两端开断引起的纵向边端效应,此气隙磁场沿直线运动方向呈正弦分布,当三相交流电随时间变化时,气隙磁场由原来的圆周方向运动变为沿直线方向运动,次级产生的磁场和初级的磁场相互作用从而产生电磁推力;在直线电机当中我们把运动的部分称为动子,对应于旋转电机的转子;这个原理和旋转电机相似,二者的差异是:直线电机的磁场是平移的,而不是旋转的,因此称为行波磁场;这时直线电机的同步速度为v=2f τ,旋转电机改变电流方向后,电机的旋转方向发生改变,同样的方法可以使得直线电机做往复运动;图1永磁直线同步电机的演变过程 图2 直线电机的基本工作原理对永磁同步直线电机,初级由硅钢片沿横向叠压而成,次级也是由硅钢片叠压而成,并且在次级上安装有永磁体;根据初级,次级长度不同,可以分为短初级-长次级结构和长初级-短次级的结构;对于运动部分可以是电机的初级,也可以是电机的次级,要根据实际的情况来确定;基本结构如图3所示,永磁同步直线电机的速度等于电机的同步速度:2s v v f τ== 1-3图3 PMLSM 的基本结构(三) 矢量控制磁场定向控制技术矢量控制技术是磁场定向控制技术是应用于永磁同步伺服电机的电流力矩控制,使得其可以类似于直流电机中的电流力矩控制;矢量控制技术是通过坐标变换实现的;坐标变换需要坐标系,变化整个过程给出三个坐标系:1) 静止坐标系a,b,c :定子三相绕组的轴线分别在此坐标系的a,b,c 三轴上;2) 静止坐标系α,β:在a,b,c 平面上的静止坐标系,且α轴与a 轴重合,β轴绕α轴逆时针旋转90度;3) 旋转坐标系d,q:以电源角频率旋转的坐标系;矢量控制技术对电流的控制实际上是对合成定子电流矢量s i的控制,但是对合成定子电流矢量s i的控制的控制存在以下三个方面的问题:1)s i是时变量,如何转换为时不变量2)如何保证定子磁势和转子磁势之间始终保持垂直3)s i是虚拟量,力矩T的控制最终还是要落实到三相电流的控制上,如何实现这个转换s i从静止坐标系a,b,c看是以电源角频率旋转的,而从旋转坐标系d,q上看是静止的,也就是从时变量转化为时不变量,交流量转化为直流量;所以,通过Clarke和Park坐标变换即3/2变换,实现了对励磁电流id和转矩电流iq的解耦;在旋转坐标系d,q中,s i已经成为了一个标量;令s i在q轴上即让id=0,使转子的磁极在d轴上;这样,在旋转坐标系d,q中,我们就可以象直流电机一样,通过控制电流来改变电机的转矩;且解决了以上三个问题中的前两个;但是,id、iq不是真实的物理量,电机的力矩控制最终还是由定子绕组电流ia、ib、ic或者定子绕组电压ua、ub、uc实现,这就需要进行Clarke和Park坐标逆变换;且解决了以上三个问题中的第三个;力矩回路控制的实现:1)图中电流传感器测量出定子绕组电流ia,ib作为clarke变换的输入,ic可由三相电流对称关系ia+ib+ic=0求出;2)clarke变换的输出iα,iβ,与由编码器测出的转角Θ作为park变换的输入,其输出id与iq作为电流反馈量与指令电流idref及iqref比较,产生的误差在力矩回路中经PI运算后输出电压值ud,uq;3)再经逆park逆变换将这ud,uq变换成坐标系中的电压u α,uβ;4)SVPWM算法将uα,uβ转换成逆变器中六个功放管的开关控制信号以产生三相定子绕组电流;(四)电流环控制交流伺服系统反馈分为电流反馈、速度反馈和位置反馈三个部分;其中电流环的控制是为了保证定子电流对矢量控制指令的准确快速跟踪;电流环是内环,SVPWM控制算法的实现主要集中在电流环上,电流环性能指标的好坏,特别是动态特性,将全面影响速度、位置环;PI调节器不同于P调节器的特点:1)P调节器的输出量总是正比于其输入量;2)而PI调节器输出量的稳态值与输入无关, 而是由它后面环节的需要决定的;后面需要PI调节器提供多么大的输出值, 它就能提供多少, 直到饱和为止;电流环常采用PI控制器,目的是把P控制器不为0 的静态偏差变为0;电流环控制器的作用有以下几个方面:3)内环;在外环调速的过程中,它的作用是使电流紧跟其给定电流值即外环调节器的输出;4)对电网电压波动起及时抗干扰作用;5)在转速动态过程中起动、升降速中,保证获得电机允许的最大电流-即加速了动态过程;6)过载或者赌转时,限制电枢电流的最大值,起快速的自动保护作用;电流环的控制指标主要是以跟随性能为主的;在稳态上,要求无静差;在动态上,不允许电枢电流在突加控制作用时有太大的超调,以保证电流电流在动态过程中不超过允许值;双闭环电机调速过程中所希望达到的目标:1)起动过程中: 只有电流负反馈, 没有转速负反馈;2)达到稳态后: 转速负反馈起主导作用; 电流负反馈仅为电流随动子系统;双闭环电机具体工作过程:根据检测模块得到的速度值和电流值实现电机转速控制;当测量的实际转速低于设定转速时,速度调节器的积分作用使速度环输出增加,即电流给定上升,并通过电流环调节使PWM占空比增加,电动机电流增加,从而使电机获得加速转矩,电机转速上升;当测量的实际转速高于设定转速时,转速调节器速度环的输出减小,电流给定下降,并通过电流环调节使PWM占空比减小,电机电流下降,从而使电机因电磁转矩的减小而减速;当转速调节器处于饱和状态时,速度环输出达到限幅值,电流环即以最大限制电流实现电机加速,使电机以最大加速度加速;电流环的主要影响因素有:电流调节器参数、反电动势、电流调节器零点漂移;电流调节器的参数中,比例参数Kp越大,动态响应速度越快,同时超调也大,因此,在调节过程中应该根据动态性能指标来选择Kp;而积分系数Ti越大,电流响应稳态精度就越高;(五)弱磁控制所谓弱磁控制和强磁控制是指通过对电动机或发电机的励磁电流进行的控制;“弱磁”就是励磁电流小于额定励磁电流;“强磁”则是比额定励磁电流大的励磁电流;强磁控制又称为强励控制,主要用在发电机短路保护或欠电压保护方面;当发电机端电压接近于0或下降太多,此时需要通过强行励磁,可使发电机的端电压升高,输出电流增大,触发保护装置动作跳闸,实现保护;弱磁控制则主要是电动机进行弱磁调速用,发电机弱磁控制则主要是指由直流发电机-直流电动机构成的G-M拖动系统,为了得到软的或下坠的机械特性时才使用;(六)电流传感器霍尔传感器是一种磁传感器;用它可以检测磁场及其变化,可在各种与磁场有关的场合中使用;霍尔传感器以霍尔效应为其工作基础,是由霍尔元件和它的附属电路组成的集成传感器;霍尔传感器在工业生产、交通运输和日常生活中有着非常广泛的应用;霍尔效应:如图1所示,在半导体薄片两端通以控制电流I ,并在薄片的垂直方向施加磁感应强度为B 的匀强磁场,则在垂直于电流和磁场的方向上,将产生电势差为U H 的霍尔电压,它们之间的关系为:dIB k U H 式中d 为薄片的厚度,k 称为霍尔系数,它的大小与薄片的材料有关;电流传感器:由于通电螺线管内部存在磁场,其大小与导线中的电流成正比,故可以利用霍尔传感器测量出磁场,从而确定导线中电流的大小;利用这一原理可以设计制成霍尔电流传感器;其优点是不与被测电路发生电接触,不影响被测电路,不消耗被测电源的功率,特别适合于大电流传感;霍尔电流传感器工作原理如图6所示,标准圆环铁芯有一个缺口,将霍尔传感器插入缺口中,圆环上绕有线圈,当电流通过线圈时产生磁场,则霍尔传感器有信号输出;。
考虑磁场饱和的双定子永磁同步发电机的磁路模型陈哲;王爱元【摘要】双定子永磁同步发电机(DS-PMSG)包括内外两个定子和中间的转子,一般的电磁场计算软件计算比较困难.建立DS-PMSG的磁路计算模型,利用铁磁材料的磁化特性曲线考虑磁场饱和,并同时考虑内、外两套绕组电枢反应对永磁磁场的影响,可对电机的性能参数进行计算,便于设计变量的及时快速调整.通过对1台3.3 kW样机的磁路计算和有限元计算的比较,证明了该模型的有效性和实用性.【期刊名称】《电机与控制应用》【年(卷),期】2019(046)003【总页数】4页(P46-49)【关键词】双定子永磁同步发电机;电枢反应;磁路饱和;仿真分析【作者】陈哲;王爱元【作者单位】上海电机学院电气学院,上海201306;上海电机学院电气学院,上海201306【正文语种】中文【中图分类】TM3410 引言双定子永磁同步发电机(DS-PMSG)具有两套绕组。
转子旋转时,2个定子同时输出感应电压。
该类电机具有精度高、响应快、加速度大、转矩波动小、过载能力高、机械集成度高、电机结构材料利用率高和驱动控制系统灵活多样等优点。
表贴式串联磁路DS-PMSG对比内置式串、并联磁路结构具有结构简单、制造成本低、内外定子电磁耦合程度低、易于实现最优设计等特点,具有更广阔的研究前景[1-3]。
等效磁路法在电机的磁路分析中具有快速方便、物理概念清晰等优点,但在设计永磁同步电机(PMSM)的磁场时,为了获得较高功率密度,铁心往往工作在接近磁饱和的状态,采用线性磁路分析会带来较大的误差。
有限元软件分析电机磁场给设计者带来了方便,但其软件价格高、计算周期长、磁路分析思想不够明确等缺点限制了其更广泛的应用[4]。
文献[5]研究基于双电机模型连续极永磁电机(CPPM)电枢反应电感的计算原理和方法。
文献[6]提出转子磁分路混合励磁同步电机的优化结构,探讨了磁场分布特性。
文献[7]为8极9槽PMSM提出一种相对简单且准确的等效磁路法计算模型。