带材纠偏控制系统最终
- 格式:ppt
- 大小:1.01 MB
- 文档页数:17

带材纠偏系统的工作原理带材纠偏系统是一种用于控制和调整带材运行轨迹的设备,广泛应用于印刷、卷材加工、纺织等行业。
它通过精确的传感器和控制系统,监测和调整带材的位置,使其保持在预定的轨道上运行,从而提高生产效率和产品质量。
本文将详细介绍带材纠偏系统的工作原理。
带材纠偏系统主要由传感器、控制器和执行机构组成。
传感器负责实时监测带材的位置,控制器根据传感器的反馈信号判断带材是否偏离轨道,并通过执行机构进行调整。
传感器通常采用非接触式的光电传感器或激光传感器,安装在带材运行轨道的两侧。
传感器能够实时感知带材的位置,将监测数据传输给控制器进行处理。
控制器是带材纠偏系统的核心部件,它根据传感器的信号进行计算和判断,确定带材的偏移程度和方向,并生成控制信号。
控制器通常采用微处理器或PLC(可编程逻辑控制器)等电子设备,具有高精度和快速响应的特点。
执行机构是带材纠偏系统的动力部分,负责根据控制信号对带材进行调整。
常见的执行机构有电动滚筒、气缸和液压缸等。
执行机构通过调整带材的张力或改变带材的轨道来实现纠偏效果。
带材纠偏系统的工作原理是:当带材偏离预定轨道时,传感器会检测到带材的位置偏差,并将这一信息传输给控制器。
控制器根据传感器的反馈信号进行计算,判断带材的偏移程度和方向。
然后,控制器生成相应的控制信号,通过执行机构对带材进行调整。
执行机构根据控制信号的指令,改变带材的张力或调整带材的轨道,使其恢复到预定的位置。
带材纠偏系统的工作过程是一个闭环控制系统。
传感器不断感知带材的位置,将这一信息反馈给控制器;控制器根据传感器的信号进行计算和判断,生成控制信号;执行机构根据控制信号对带材进行调整;带材的位置发生变化后,传感器再次感知并反馈给控制器,从而形成一个循环。
带材纠偏系统的优点在于能够实现高精度和快速的纠偏效果。
传感器能够实时监测带材的位置,控制器能够快速计算和判断带材的偏移情况,并通过执行机构进行调整。
这种闭环控制系统能够自动纠正带材的偏移,使其保持在预定的轨道上运行,从而提高生产效率和产品质量。
带钢纠偏控制系统设计作者:王佳佳高晓丁聂兆明李远朝来源:《电子世界》2012年第24期【摘要】本设计是针对钢带在卷取机上绕卷运行时发生的左右偏移而提出控制方案及具体处理方法。
采用智能PID控制算法,对钢带的偏移量进行实时的控制,使之在左右偏移时偏移量控制在安全的范围内。
主要是对系统数学模型的建立和数据处理的算法分析。
【关键词】钢带;纠偏控制;智能PID控制;卷取机1.引言钢带纠偏控制是指钢性卷材在喷涂、印刷、冲切、层合、分切或其它绕卷过程中始终要保持钢性卷材侧面整齐一致而采取的技术操作。
卷材边缘一旦没有对齐就会引起后续的工步出错,导致材料浪费或停工调整。
所以在加工处理钢性卷材时需要对偏移的钢性卷材进行及时的纠偏操作。
2.控制系统的组成系统的组成如图1所示,由基于AT89C52处理器、光电传感器、数模及模数转换模块、伺服放大器及配套的伺服阀、位置传感器、液压缸及其配套的液压设备等组成。
3.控制系统的数学模型与算法实现3.2 算法实现该控制系统实现的是对钢带位置偏差信号的实时控制,而PID控制算法是被工程实际有力地证明了的先进控制算法,其算法简单、鲁棒性好、可靠性高。
在工程实际中,微分环节D很难控制,因为它对噪声比较敏感,抗噪声干扰性差。
所以本设计采用PI调节器,采用参数自调整规则以适应不同的工况,参数自调整PI调节器结构如图3所示。
4.MATLAB仿真分析控制系统设计完成后,对控制算法进行了MATLAB/SIMULINK仿真实验,并对仿真结果进行分析,参数自调整PI控制时的阶跃输入仿真曲线如图4所示。
仿真实验结果表明,控制器从不到2ms的时间开始响应,满足系统的要求,而且控制变化量平稳过渡超调量较小具有很好的鲁棒性和总体快速性。
仿真实验结果显示了该系统的控制效果良好。
5.结束语本设计主要研究的是对带钢在运行过程中出现的偏差进行实时的控制,以保证偏差在安全生产的范围内。
系统采用现在较流行的PID算法,使得系统的控制精度大大提高、系统的稳定性更好。
目录1 绪论 (3)1.1 概述 (3)1.1.1 研究背景 (3)1.1.2 研究现状 (4)1.1.3 发展方向 (6)1.2 纠偏电液伺服控制系统的特点和构成 (7)1.3 发展趋势 (7)2 卷取机纠偏控制系统设计 (9)2.1 卷取机工作原理 (9)2.1.1 卷取机的应用 (9)2.1.2 工作方式分析 (10)图2.1卷取机简图 (11)2.2 带钢纠偏控制系统原理 (11)2.2.1 带钢纠偏控制系统的介绍 (11)2.2.2 带钢纠偏控制系统工作原理 (12)2.3 控制系统设计 (12)2.3.1 控制对象的参数 (12)2.3.2 控制系统设计方案 (13)2.3.3 纠偏液压站原理图设计 (14)2.4 系统元件设计选型 (15)2.4.1 光电传感器设计 (15)3 元件的动力学分析和主要参数的确定 (19)3.1 电液伺服阀简介 (19)3.2 系统技术参数计算 (19)3.3 初选系统压力 (20)3.4 对称液压缸的主要参数 (20)3.5 计算对称液压缸的工作压力、流量和功率 (22)3.5.1 计算对称液压缸的工作压力 (22)3.5.2 对称液压缸工作所需的流量 (23)3.5.3 计算对称液压缸的输出功率 (23)3.6 液压控制系统动力元件参数的确定 (23)3.6.1 确定动力元件(伺服阀)参数 (23)3.6.2 动力元件(伺服阀)的选择 (24)3.6.3 液压泵及电机的选型 (24)3.6.4 液压阀的选型 (25)3.7 液压辅件的设计计算与选型 (26)3.7.1 油箱的设计 (26)3.7.2 阀块的设计 (27)3.7.3 管道尺寸的确定 (28)3.7.4 其它元件的选型 (30)3.7.5 液压油的选用 (30)参考文献 (32)1绪论1.1概述电液伺服阀是闭环控制系统中最重要的一种伺服控制元件,它能将微弱的电信号转换成大功率的液压信号(流量和压力)。


论文说明书——带材纠偏装置控制系统(24页)一、项目背景随着我国工业自动化水平的不断提高,各类生产线对带材的质量要求也越来越高。
在实际生产过程中,带材跑偏现象时常发生,这不仅影响了生产效率,还可能导致产品质量下降。
为解决这一问题,我们研发了一套带材纠偏装置控制系统,旨在提高生产线的稳定性和带材的精度。
二、研究目的与意义1. 研究目的本论文旨在设计一套带材纠偏装置控制系统,通过对带材运行过程中的实时监测与调整,实现带材自动纠偏,降低生产过程中的故障率,提高生产效率。
2. 研究意义(1)提高带材生产线的自动化程度,减轻操作工人的劳动强度;(2)确保带材在生产过程中的稳定运行,提高产品质量;三、系统设计原理1. 系统概述带材纠偏装置控制系统主要由检测部分、控制部分和执行部分组成。
检测部分负责实时监测带材的运行状态,控制部分根据检测到的数据进行分析处理,并输出控制信号,执行部分根据控制信号对带材进行纠偏。
2. 系统设计原理(1)检测部分:采用高精度传感器,实时监测带材的运行位置;(2)控制部分:采用PLC(可编程逻辑控制器)作为核心控制器,实现对检测数据的处理和分析;(3)执行部分:通过伺服电机驱动纠偏机构,实现对带材的实时纠偏。
四、系统硬件设计1. 传感器选型根据生产现场的实际需求,本系统选用精度高、响应速度快的光电传感器作为检测元件。
2. 控制器选型本系统选用性能稳定、抗干扰能力强的PLC作为核心控制器,实现对整个系统的实时监控与调整。
3. 执行机构选型根据纠偏力矩和响应速度的要求,本系统选用伺服电机驱动纠偏机构,确保带材在高速运行过程中的纠偏效果。
五、系统软件设计1. 软件架构带材纠偏装置控制系统的软件部分采用模块化设计,主要包括主控模块、检测模块、纠偏模块、通信模块和人机交互模块。
这样的设计便于后期维护和功能扩展。
2. 程序设计(1)主控模块:负责整个系统的启动、停止和异常处理,确保系统稳定运行;(2)检测模块:实时采集传感器数据,对带材位置进行监测;(3)纠偏模块:根据检测模块提供的数据,计算纠偏策略,并输出控制信号;(4)通信模块:实现PLC与上位机之间的数据交换,便于监控和调试;六、系统调试与优化1. 系统调试在硬件安装完成后,我们对带材纠偏装置控制系统进行了详细的调试。
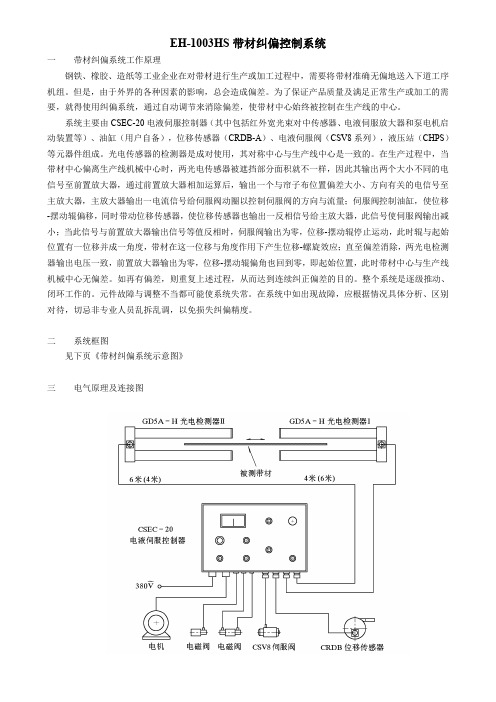
EH-1003HS带材纠偏控制系统一带材纠偏系统工作原理钢铁、橡胶、造纸等工业企业在对带材进行生产或加工过程中,需要将带材准确无偏地送入下道工序机组。
但是,由于外界的各种因素的影响,总会造成偏差。
为了保证产品质量及满足正常生产或加工的需要,就得使用纠偏系统,通过自动调节来消除偏差,使带材中心始终被控制在生产线的中心。
系统主要由CSEC-20电液伺服控制器(其中包括红外宽光束对中传感器、电液伺服放大器和泵电机启动装置等)、油缸(用户自备),位移传感器(CRDB-A)、电液伺服阀(CSV8系列),液压站(CHPS)等元器件组成。
光电传感器的检测器是成对使用,其对称中心与生产线中心是一致的。
在生产过程中,当带材中心偏离生产线机械中心时,两光电传感器被遮挡部分面积就不一样,因此其输出两个大小不同的电信号至前置放大器,通过前置放大器相加运算后,输出一个与帘子布位置偏差大小、方向有关的电信号至主放大器,主放大器输出一电流信号给伺服阀动圈以控制伺服阀的方向与流量;伺服阀控制油缸,使位移-摆动辊偏移,同时带动位移传感器,使位移传感器也输出一反相信号给主放大器,此信号使伺服阀输出减小;当此信号与前置放大器输出信号等值反相时,伺服阀输出为零,位移-摆动辊停止运动,此时辊与起始位置有一位移并成一角度,带材在这一位移与角度作用下产生位移-螺旋效应;直至偏差消除,两光电检测器输出电压一致,前置放大器输出为零,位移-摆动辊偏角也回到零,即起始位置,此时带材中心与生产线机械中心无偏差。
如再有偏差,则重复上述过程,从而达到连续纠正偏差的目的。
整个系统是逐级推动、闭环工作的。
元件故障与调整不当都可能使系统失常。
在系统中如出现故障,应根据情况具体分析、区别对待,切忌非专业人员乱拆乱调,以免损失纠偏精度。
二系统框图见下页《带材纠偏系统示意图》三电气原理及连接图四组成系统的各元部件1. GD5A-400H或GD5A-200H光电检测器;2. CSEC-20电液伺服控制器;3. CRDB-A位移传感器;4. CSV8电液伺服阀;5. CHPS-25 (30或40)纠偏控制系统液压站。
液压控制系统结业论文题目名称:带材卷取机跑偏控制系统学院:机械工程学院专业年级:流体传动及其控制 09 姓名:**班级学号:液09-11 指导教师: ***二O一二年十二月二十八日目录第一章绪论 ..................................................................................... 错误!未定义书签。
1.1研究的目的及意义 ................................................................ 错误!未定义书签。
1.2国内外发展及状况 ................................................................ 错误!未定义书签。
1.3带材卷取机负载(工艺)分析 (1)1.4带材卷取机主要技术要求 (2)本章小结 (2)第二章带材卷取机总体设计方案 (3)2.1带材卷取机机械传动方案 (3)2.2带材卷取机电气控制方案 (3)2.3带材卷取机液压传动总体设计方案 (3)本章小结 (3)第三章带材卷取机主要技术指标计算 (4)3.1带材卷取机静态设计 (4)3.1.1伺服阀 (4)3.1.2液压缸主要规格尺寸 (4)3.1.3传感器 (5)3.2带材卷取机动态设计 (6)3.2.1各环节传函 (6)3.2.1.1伺服阀 63.2.1.2液压动力机构 63.2.1.3光电检测器和伺服放大器 63.2.2系统方块图 (7)3.2.3伯德图 (8)3.2.4确定开环增益 (8)3.2.5动态分析 (8)3.3带材卷取机校核计算 (9)3.3.1稳态误差校验 (9)3.3.2系统精度指标校验 (9)本章小结 (9)第四章带材卷取机其它元件计算选择 (10)4.1泵的选择 (10)4.2阀的选择 (10)本章小结 (10)第五章带材卷取机泵站校核计算 (11)5.1带材跑偏控制系统压力损失计算11 5.2带材跑偏控制系统效率计算11 5.3带材跑偏控制系统液压冲击计算11 5.4带材跑偏控制系统发热计算11本章小结 (11)第六章结论 (12)致谢 (13)参考文献 (14)摘要本设计为卷取机跑偏控制系统的设计。
计算机自动纠偏系统在带钢卷取中的应用摘要在生产线上,带钢的位置纠偏控制是带钢连续生产的重要环节。
良好的带钢位置纠偏控制系统可以保证带钢产品的高质量。
本设计系统分析了带钢跑偏产生的原因。
结合生产现场的实际情况和现有的专家控制规律,指出以伺服阀为基础的液压控制系统在近现代相关工业领域中广泛应用。
并指出电液伺服控制系统同电子技术与控制技术相结合的向数字化的发展趋势。
带钢位置纠偏控制系统设计目的是通过光电式传感器获得一个高精度的带钢偏移信号,并驱动液压执行机构精确地完成带钢的位置纠偏。
通过对带钢位置纠偏控制系统执行机构的分析,得出电液伺服阀流量传递函数、卷取机的传递函数和其他元件的传递函数,经过整理确定了最终的带钢位置纠偏控制系统的数学模型。
在结合传统PID控制原理以及专家系统的基础上,确定了智能PI参数自整定控制方案。
通过分析PID参数对系统的作用,确定了智能型PI调节器的调整规则,从而建立起了系统仿真模型,最后仿真结果表明采用智能型PI调节器控制系统控制能够比单纯采用PID控制器的系统具有更短的响应时间、更小的超调现象和更强的抑制负载扰动的能力。
最后,本论文对现行方法中的不足进行了总结。
关键词:带钢纠偏系统电液伺服阀建模 PID控制 MATLAB仿真The application of computer automatic guiding system in strip coilingAbstractIn the production line, steel strip position correction control is an important part of continuous production. Good strip position correction control system can guarantee the high quality steel products. The reason for steel strip department was analyzed systemically. The design combine the actual situation of the production site and the existing expert control law, pointed out that the hydraulic control system based on the servo valve are widely used in the related industries field. And pointed out that the digital trend that the Electro-hydraulic servo control systems combine with the electronic technology and control technology.The design purpose of the steel strip position guiding system was to obtain a high precision departure distance of steel strip by the photoelectric width detector and displacement sensor and to control the electrical-hydraulic servo system complete accurately rectifying function. Via analyzing the elements of the electrical-hydraulic servo system, the transfer functions of the servo valve, coiling machine and other components were obtained. After finishing the final mathematical model of the steel strip position guiding system was established.Combining the PID control theory and expert system, the Intelligent PI parameters self-tuning control scheme was established. By analyzing the effect of each parameters of PID controller, the adjustment rules of the intelligent PI regulator were obtained, and via these finally founded a system simulation model. The simulation results showed the intelligent PI controller had better performance in both dynamic and static state, and it was more robust than normal PID controller.Finally, the shortcomings of existing methods are summarized..Key words: strip correction system;servo valve;modeling;PID control;MATLAB simulation1轧制自动化简介1.1轧制过程自动化的基本概念自动化一词对于我们已不陌生,因为各工业部门正在广泛地采用着不同的自动化技术。
带钢纠偏控制系统(CPC)故障分析【摘要】介绍了冷轧带钢连续酸洗机组中CPC纠偏系统的组成,分析了CPC系统故障产生的主要原因,提出了改进措施。
【关键词】酸洗;CPC;纠偏酸洗是冷轧带钢生产工艺流程中第一道工序,攀钢冷轧厂引进HITACHI公司八十年代初生产的连续酸洗机组,虽然在使用过程中经过了与DEMAG公司和ABB公司等进行了多次局部改进,但在投入生产以来,CPC系统还是暴露出了在机械和液压方面的先天缺陷,严重制约产量及质量的进一步提高。
1.CPC纠偏系统的组成CPC纠偏系统是一个完整的闭环控制系统,主要由平行光发射器、平行光接收器PLS(Parallel Light Sensor)、控制单元、液压伺服系统、纠偏机构等部分组成,如图1所示。
为确保纠偏的准确性,纠偏机构安装找正基准为机组中心线。
纠偏装置的中心位置或控制的原始位置由中心位置传感器检测。
纠偏系统工作过程中,带钢穿行在平行光发射源和平行光接收器(PLS)之间(左右各一个PLS,沿机组中心线对称布置),带钢遮挡两侧光源的量由PLS检测出来,并转化为电信号传送给控制器。
控制器对两接收单元PLS传送来的电信号之绝对差值ΔI进行PD运算和功率放大,输出纠偏信号到伺服阀,控制伺服阀液压缸的动作方向和动作量。
伺服液压缸驱动浮动机架摆动和平动,使带钢两侧受到的张力和摩擦力发生变化导致带钢位置的变化,同时也改变带钢遮挡光源的量和ΔI的变化。
2.CPC系统液压故障分析及改进措施本套酸洗机组共有七套独立的CPC液压系统,每套系统独立控制一个带钢纠偏装置,其功能是:不管引起带钢跑偏的各种扰动因素如何变化,纠偏装置都能自动调节,防止带钢跑偏。
此CPC液压控制系统全部使用EMG公司的HR100V25液压控制装置,系统原理图如图2所示。
CPC液压控制系统现场环境恶劣,原设计中考虑的纠偏能力略小,未考虑来料板形差而导致纠偏增大的状况,致使目前CPC液压系统温度高,同时伴随着故障的突发性,具体缺陷如下:①系统采用风冷冷却器,由于生产现场铁粉、灰尘多,容易堆积在冷却器散热片上,大大降低了冷却效果,致使油温较高;②泵安装在油箱内,造成液压泵有些日检查项目无法开展,而且当泵、联轴器出现故障更换时,会造成人为的油液污染,缩短伺服阀的使用寿命,同时增加故障停机时间;③此七套CPC系统均没有备用泵,任何一台泵站故障均会造成机组停机,已不能满足连续机组的生产要求。
纠偏控制系统方案背景介绍纠偏控制系统是一种用于自动纠正偏差的系统,可应用于各种工业和机械领域。
本文档将介绍一个纠偏控制系统的方案,包括系统的设计原理、工作流程和实施步骤。
设计原理纠偏控制系统的设计原理基于反馈控制理论,通过对偏差进行实时测量和分析,然后根据分析结果进行相应的补偿控制,从而实现偏差的自动纠正。
该系统通常由传感器、控制器和执行器组成。
传感器负责测量偏差的大小和方向,并将测量值传输给控制器。
控制器根据预设的控制算法和反馈信号,计算出执行器应该采取的补偿措施。
执行器根据控制信号,调整相关参数或位置,以实现偏差的减小或消除。
工作流程纠偏控制系统的工作流程可分为以下几个步骤:1.传感器测量:传感器测量系统的偏差,并将测量值传输给控制器。
2.偏差分析:控制器对传感器测量值进行分析,确定偏差的大小和方向。
3.控制策略:控制器根据预设的控制算法和反馈信号,确定执行器应该采取的补偿策略。
4.信号传输:控制器将控制信号传输给执行器,指导其进行相应的调整。
5.参数/位置调整:执行器根据控制信号进行参数或位置的调整,以减小或消除偏差。
6.再次测量:传感器再次测量系统的偏差,并将测量值传输给控制器,以检验补偿效果。
7.循环控制:系统根据前述步骤反复进行,直到达到预设的纠偏目标或补偿效果满意为止。
实施步骤实施纠偏控制系统的步骤如下:1.需求分析:明确系统应用的领域和需求,确定纠偏目标和性能指标。
2.系统设计:根据需求分析结果,设计系统的整体架构和各组件之间的关系。
3.传感器选择:选择适合的传感器类型和规格,能够准确测量系统的偏差。
4.控制器设计:设计控制器的控制算法和信号处理策略,确保系统能够做出准确的补偿控制。
5.执行器选择:根据系统需求和控制器设计,选择适合的执行器类型和规格。
6.系统集成:将传感器、控制器和执行器组装在一起,进行相应的电气和机械连接。
7.参数调整:根据实际情况,进行控制器参数的调整和优化,以获得更好的控制效果。