三相异步电动机的制动特性
- 格式:ppt
- 大小:1.11 MB
- 文档页数:16
摘要近几十年来,随着电力电子技术、微电子技术及现代控制理论的发展,中、小功率电动机在工农业生产及人们的日常生活中都有极其广泛的的应用。
特别是在乡镇企业及家用电器中,更需要有大量的中、小功率电动机。
由于这种电动机的发展及广泛的应用,它的使用、保养和维护工作也越来越重要。
电机是现代工农业生产和交通运输的重要设备,与电机配套的控制设备的性能已经成为用户关注的焦点。
电机的控制包括电机的起动、调速和制动。
异步电动机由于具有结构简单、体积小、价格低廉、运行可靠、维修方便、运行效率较高、工作特性较好等优点,因而在电力拖动平台上得到了广泛应用。
据统计,其耗电量约占全国发电量的40%左右。
当电机并入电网时,电机转速从静止加速到额定转速的过程称为电机的起动过程。
异步电动机的起动性能最重要的是起动电流和起动转矩。
因此在电机的起动过程中,如何降低起动电流,增大起动转矩,一直是机电行业的专家们探讨的重要课题。
电动机机应用广泛,种类繁多、性能各异,分类方法也很多。
本文是对三相异步电动机做出深入的剖析与设计。
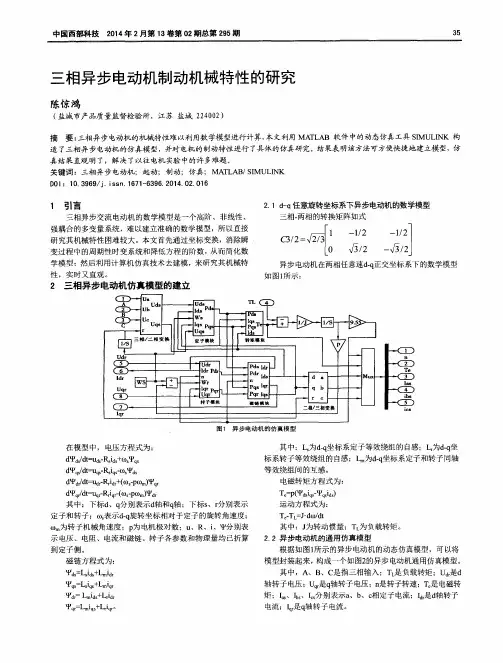
三相异步电动机是一种具有高效率、低磨损、低噪声的电机机种.本设计在介绍三相异步电动机中,关于相数、极数、槽数及绕组连接方式的选择方法和应遵从的规律详细的加以说明和介绍。
文中主要介绍了几种常用的制动方式的特点,对不同制动方式进行了技术比较,分析了他们各自的实用场所,为实际应用提供了科学的理论依据。
关键词:三相异步电动机结构制动方式前言电动机是把电能转换成机械能的设备。
近几十年随着科技的发展电动机在机械、冶金、石油、煤炭、化学、航空、交通、农业以及其他各种工业中,被广泛地应用着。
随着工业自动化程度不断提高,需要采用各种各样的控制电机作为自动化系统的元件,人造卫星的自动控制系统中,电机也是不可缺少的。
此外在国防、文教、医疗及日常生活中(现代化的家电工业中)电动机也愈来愈广泛地应用起来与单相电动机相比,三相异步电动机运行性能好,并可节省各种材料。
三相异步电动机的制动特性常见的三种制动方式:能耗制动反馈制动反接制动1.能耗制动特性异步电动机的反接制动用于精确停车有肯定的困难,由于它简单造成反转,而且电能损耗也比较大;反馈制动虽然是比较经济的制动方法,但它只能在高于同步转速下使用;而能耗制动却是比较常用的精确停车的方法。
原理图如下:进行能耗制动时,首先将定子绕阻从三相电流电源断开(1KM打开),接着马上将一抵押直流电源统入定子绕阻(2KM闭合)。
直流电流通过定子绕阻后,在电动机内部建立一个固定不变的磁场,由于转子在运动系统存储的机械能维持下连续旋转,转子导体内就产生感应电势和电流,该电流于恒定磁场相互作用产生作用方向于转子实际旋转方向相反的制动转矩,在它的作用下,电动机转速快速下降,此时运动系统贮存的机械能被电动机转换成电能后消耗在转子电路的电阻中。
2.反馈制动特性由于某种缘由异步电动机的运行速度高于它的同步速度,异步电动机就进入发电状态。
反馈制动时,电机从轴上吸取功率后,一部分转化为转子铜耗,大部分则通过空气隙进入定子,并在供应定子铜耗和铁耗后,反馈给电网,所以,反馈制动又称发电制动。
原理图:反馈制动运行状态的两种状况:1.负载转矩为位能性转矩的起重机械在下放重物时的反馈制动状态;2.电动机在变极调速或变频调速过程中,极对数突然增多或供电频率突然降低,使同步转速突然降低时的反馈制动运行状态。
3.反接制动特性电源反接假如正常运行时异步电动机三相电源的相序突然转变(电源反接),这就转变了旋转磁场的方向,电动机状态下的机械特性曲线就由第一象限的曲线1变成了第三象限的曲线2。
但由于机械惯性的缘由,转速不能突变,系统运行点a只能平移至特性曲线2至b点,电磁转矩由正变负,则转子将在电磁转矩和负载转矩的共同作用下快速减速。
倒拉制动倒拉制动消失在位能负载转矩超过电磁转矩的时候,例如起重机下放重物,为了使下降速度不致太快,就常用这种工作状态。
三相异步电动机连续控制电路一、引言三相异步电动机是工业生产中最常用的电动机之一。
它具有结构简单、使用可靠、运行平稳等特点,被广泛应用于各种机械设备中。
在实际应用中,为了满足不同的工艺要求和实现自动化控制,需要对三相异步电动机进行连续控制。
本文将介绍三相异步电动机连续控制电路的相关知识。
二、三相异步电动机基础知识1. 三相异步电动机的结构和工作原理三相异步电动机由定子和转子两部分组成。
定子上布置着三个对称排列的同心圆形线圈,称为定子绕组。
转子上也布置着类似的线圈,称为转子绕组。
当通过定子绕组通以交流电时,在定子内形成旋转磁场,磁场旋转速度等于供电频率除以极对数。
由于转子中也存在磁场,因此在磁场作用下,转子会受到一个旋转力矩,并随着旋转磁场而旋转。
2. 三相异步电动机的运行特性三相异步电动机具有以下运行特性:(1)起动特性:三相异步电动机的起动需要通过一定的方法来实现,常用的方法有直接启动、降压启动和星-三角启动等。
(2)空载特性:当三相异步电动机处于空载状态时,其转速会略高于额定转速。
(3)负载特性:当三相异步电动机处于负载状态时,其转速会下降,但不会低于额定转速。
三、三相异步电动机连续控制电路1. 三相异步电动机连续控制原理三相异步电动机连续控制是指通过改变电源对电机的供电方式和供电参数,来实现对电机的运行状态进行调节。
常用的控制方式有调速、正反转和制动等。
其中调速是最常见的一种控制方式。
2. 三相异步电动机调速控制原理调速是通过改变供电频率或改变供电电压来实现对三相异步电动机转速进行调节。
常用的调速方法有变频调速和降压调速两种。
(1)变频调速变频调速是指通过将交流供电源经过整流、滤波、逆变等处理后,得到一个可变频率、可变幅值的交流输出,从而实现对电机转速的调节。
变频调速的优点是调速范围大,控制精度高,但成本较高。
(2)降压调速降压调速是指通过改变电源对电机的供电电压来实现对电机转速的调节。
常用的降压调速方法有自耦降压启动、稳压变压器降压启动和可控硅降压启动等。
精品文档三相异步电动机在各种运行状态下的机械特性一、实验目的了解三相线绕式异步电动机在各种运行状态下的机械特性。
二、预习要点1、如何利用现有设备测定三相线绕式异步电动机的机械特性。
2、测定各种运行状态下的机械特性应注意哪些问题。
3、如何根据所测出的数据计算被试电机在各种运行状态下的机械特性。
三、实验项目1、测定三相线绕式转子异步电动机在R=0时,电动运行状态和再生发电制动状态下的机械特性。
S2、测定三相线绕转子异步电动机在R=36Ω时,测定电动状态与反接制动状态下的机械特性。
S3、R=36Ω,定子绕组加直流励磁电流I=0.36A及I=0.6A时,分别测定能耗制动状态下的机械特21S性。
四、实验方法2、屏上挂件排列顺序D51 D34-2 、精品文档.精品文档1S2I1A4R3*U*SW21RV s1V R s I1WAWR12s**A2R12'1'I a I f+源+R V2电UGMV组机0a源2枢2V绕电电20电-磁流磁2 2励直励-图6-2 三相线绕转子异步电动机机械特性的接线图3、R=0时的反转性状态下机械特性、电动状态机械特性及再生发电制动状态下机械特性。
S用编号接线,图中M用编号为DJ17的三相线绕式异步电动机,U=220V,Y接法。
MG(1)按图6-2N 合在左S合向左边1端,、S选用D51挂箱上的对应开关,并将S为DJ23的校正直流测功机。
S、S21213、串上四只900Ω180Ω阻值加上R3、R5R边短接端(即线绕式电机转子短路),S合在2'位置。
选用R2的13上R7选用1800Ω阻值,RMET01电源控制屏上两只联再加R1300Ω并联共4430Ω阻值,R选用R1上S2,交流电500V200mA,V的量程为的量程为36Ω的电阻,R暂不接。
直流电表A、A5A,A量程为23243 A量程为3A。
的量程为表V500V,11的定子绕组接成星形的情况下。
M2'位置,端,(2)确定S合在左边1S合在左边短接端,S合在312阻值置最大位置,将控制屏左侧三相调压器旋钮向逆时针方向旋到底,即把输出电压调到零。
三相异步电动机制动方法一、动态制动(减速制动):动态制动是利用电动机自身的电磁特性,通过改变电动机的充电状态来实现制动的一种方法。
它通过外部去势的方式,使电动机电源断开,同时将电机的电源接到一个励磁回路中,使电动机以发电机的方式运行。
电动机实际上就像一个发电机,将电能转化为机械能,从而减慢电动机的转速,并实现制动效果。
这种制动方法可以快速而平稳地停止电动机的运动,适用于较大功率的电动机制动。
二、电阻制动:电阻制动是通过外接电阻器将电动机的转子电路改成绕组和电阻器串联的方式实现制动。
在制动过程中,电动机实际上是在电阻器的阻力作用下运行,电动机转子的旋转速度逐渐减慢,直到停止转动。
这种制动方法因为直接将电动机转子的电路改成电阻器,故造成了能量的浪费。
电阻制动适用于小功率的电动机制动。
三、反接制动:反接制动是将电动机的两个相互衔接的定子绕组并联接在一起,形成一个闭合路,通过改变回路的连接方式来实现制动。
在制动过程中,将电动机的接线转换为星型连接并短接两个绕组,实现电动机转子的制动。
这种制动方式简单可靠,适用于小功率的电动机制动。
四、反接充电制动:反接充电制动是通过将电动机接电源的两个相在一段时间内反过来接,使电动机变成发电机而实现制动。
在制动过程中,电动机的旋转能量被转换为电能,通过充电电阻器将电能回馈到电网中,从而实现制动效果。
这种制动方法适用于运行时间较短且制动次数较少的情况,可以减少能量的浪费。
五、电抱闸制动:电抱闸制动是通过外接电磁或气动抱闸装置将电动机的转子固定住,使电动机转子无法转动而实现制动。
电动机在制动过程中,当电抱闸装置加电时,抱闸器固定住电动机转子,阻止转子转动。
这种制动方法简单可靠,制动效果好,适用于较大功率的电动机制动。
综上所述,三相异步电动机的制动方法有动态制动、电阻制动、反接制动、反接充电制动和电抱闸制动。
根据具体的运行要求和电动机的功率,选择合适的制动方法可以实现电动机的安全、高效地制动。
《电机与拖动》课程设计三相异步电动机能耗制动系统System of three phase asynchronous motor energy consumption braking学生姓名刘庆_学生学号20120501157学院名称信电工程学院专业名称电气工程及其自动化指导老师韩成春2015 年1月22日摘要本文介绍了基于三相异步电动机的制动方法——能耗制动。
正常运行的电动机,切断电动机定子侧的三相交流电源,并将电动机的定子绕组任意两相出线端接到直流电源上,则直流电源将在定子内形成固定磁场,转子靠惯性旋转并切割此固定磁场,在转子绕组中产生感应电动势并形成感应电流,此电流与固定磁场相互作用,便产生电磁转矩,这个电磁转矩与转子转动方向相反,达到制动状态。
转子动能消耗在转子电阻内,这个过程就是能耗制动。
关键词三相异步电动机;能耗制动;直流电源;制动转矩;定子绕组目录1、绪论 (1)1.1 课题研究背景 (1)1.2 课题研究意义 (1)1.3 课程设计的目的和任务 (1)2、三相异步电动机的结构和工作原理 (2)2.1三相异步电动机的结构 (2)2.2三相异步电动机的工作原理 (2)2.2.2 转差率 (3)3、三相异步电动机的能耗制动 (4)3.1三相异步电动机能耗制动的原理 (4)3.2三相异步电动机能耗制动电路 (4)3.3 能耗制动过程分析 (6)4、三相异步电动机的选取和制动参数的计算 (7)4.1三相异步电动机的型号 (7)4.3计算直流电压、电流以及串入电路的电阻值 (8)4.4制动时间的确定 (9)结论 (10)心得 (11)参考文献 (12)附录 (13)附录1 (13)附录2 (14)致谢 (15)1、绪论1.1 课题研究背景异步电动机主要用作电动机,其功率范围从几瓦到上万千瓦,是国民经济各行业和人们日常生活中应用最广泛的电动机,为多种机械设备和家用电器提供动力。
例如机床、中小型轧钢设备、风机、水泵、轻工机械、冶金和矿山机械等,大都采用三相异步电动机拖动;电风扇、洗衣机、电冰箱、空调器等家用电器中则广泛使用单相异步电动机。
三相异步电动机的能耗制动
所谓能耗制动就是将正常运行的电动机的定子绕组的三相交流电源切断,同时给定子绕组的任意两相通入直流电,此时定子中的旋转磁场消失,由直流电产生了恒定磁场。
由于转子在惯性作用下继续转动,转子导体切割恒定磁场,产生转子感应电动势,从而产生感应电流;同时,转子中的感应电流又与磁场相互作用,产生与转速方向相反的电磁转矩,即制动转矩。
因此,转子转速迅速下降,当转速下降至零时,转子中的感应电动势和感应电流均为零,制动过程结束。
制动期间,转子的动能转变为电能消耗在转子回路的电阻上,所以称这种制动为能耗制动。
设电动机原来工作在固有机械特性曲线上的A点,制动瞬间,因转速不能突变,工作点由A点过渡到能耗制动机械特性曲线上(曲线1)的B点,在制动转矩的作用下,电动机开始减速,工作点沿曲线1变化,直到原点(n=0,T=0),制动结束。
若电动机负载为位能性负载,则当电动机转速为零时,就要实现停车,必须立即采用机械制动的方法将电动机轴刹住,否则电动机将在位能性负载的作用下反转,机械特性曲线将进入第IV象限。
为了限制制动电流,在转子回路中串入了制动电阻RB,制动电阻的选择要适当,不能太大,否则制动效果不好,也不能太小,否则制动电流又太小,影响电动机的可靠性。
能耗制动广泛应用于要求平稳准确停车的场合,也应用于起重机一类位能性负载的机械上,用来限制重物的下降速度,以使重物稳定下放。
三相异步电动机的三种制动方式最经济:回馈制动最迅速:反接制动能制停:能耗制动时间:2010-04-27 16:47来源:作者:点击:次三相异步电动机与直流电动机一样,也有再生回馈制动、反接制动和能耗制动三种方式。
它们的共同点是电动机的转矩M与转速n的方向相反,以实现制动。
此时电动机由轴上吸收机械能,并转换成电能。
一、再生回馈制动再生回馈制动是在外加转矩的作用下,转子转速超过同步转速,电磁转矩改变方向成为制动转矩的运行状态。
再生回馈制动与反接制动和能耗制动不同,再生回馈制动不能制动到停止状态。
以下是再生回馈制动存在:(1)当电网的频率突然下降或者电机的极数突然增高,电机可能工作在发电状态,此时的电机将机械能转变成电能回馈给电网。
如图1,当电机在电动状态下运行时工作于P点,在突然变极或者变频时,电机的工作特性会突然在a线1段部分(蓝线部分),电机的转矩突然变负,其制动作用,直到最后重新稳定工作于P点为止,电机又回到电动状态。
2图1(2)当电机在位能负载(如吊车、提升机)的作用下,使其转速n高于同步转速n,此时,电机的输出转矩变负,电机由轴上吸收机械能,当电机的转矩(制0点),此动转矩)与负载的位能转矩相平衡时,电机既稳定运行(如图2中P3时电机以高于同步转速的速度运行。
在转子电路中串入不同的电阻,可得到不同的人为机械特性,并可得到不同的稳定速度,串入的电阻越大,稳定速度越高,一般在回馈制动时不串入电阻,以免转速过高。
图2二、反接制动反接制动是在电机定子三根电源线中的任意两根对调而使电机输出转矩反向产生制动,或者在转子电路上串接较大附加电阻使转速反向,而产生制动。
(1)电源两相反接的反接制动:点稳定运行,为使电机停转,将定子三根电源线中如图3所示,电机原在P1的任意两根对调,使旋转磁场反向,电机的转矩反向,起制动作用,电机运行在a线段。
当电机制动停止时,应及时将电机与电网分离,否则电机会反转。
电源两相反接反接制动的优点是制动效果强,缺点是能量损耗大,制动准确度差。
对三相异步电动机的机械特性启动制动与调速的总结
三相异步电动机是一种常用的电动机类型,具有机械特性启动、制动和调速的特点。
下面是对三相异步电动机的机械特性启动、制动和调速的总结:
1. 机械特性启动:
三相异步电动机通过旋转磁场的作用,使转子在磁场的作用下旋转,从而完成机械特性启动。
机械特性启动时,电流较大,容易产生电磁瞬变和热损耗,因此需要采取措施减少其影响。
常用的方法有:阻抗启动、星角启动、自耦启动、电容启动等,其中阻抗启动和星角启动是较为常用的方法。
2. 机械特性制动:
机械特性制动是指通过改变电源的供电方式,使电动机磁场反转,从而使电动机逆向运转,达到减速、停止的目的。
机械特性制动时,需要考虑电动机回转的问题,为此可以采用反电动势励磁制动和短路制动等。
3. 调速:
三相异步电动机的调速方式有很多种,包括电压调速、变频调速、极对数调速、转子电流调速、波形调速等。
其中,变频调速是目前最为成熟的调速方法,可以实现宽范围的调速控制,且对电机影响小,控制稳定性好。
总之,三相异步电动机的机械特性启动、制动和调速等方面是该电机应用时需要注意的关键问题。
选择适当的启动和制动方法,以及合适的调速方式,可以提高电机的运行效率,并延长其使用寿命。
工艺与装备143三相异步电动机的机械特性、启动、制动与调速刘宗涛毕强(九江职业技术学院,九江332000)摘要:通过对概念的解释和详尽的分析,对三相异步电动机的四个方面进行阐述,即三相异步电动机的机 械特性、启动、制动以及调速。
对三相异步电动机的一些特点进行描述,如结构较为简单、费用低、维护方便等。
现代社会,异步电动机的电力拖动应用非常广泛。
在解析三相异步电动机机械特性的基础上,对异步电动机的启 动、制动以及调速的一些技术问题进行了详尽的说明与分析。
关键词:三相异步电动机机械特性启动制动调速异步电动机具备许多的特性,其中包括结构简单、价 格相对较低、维护方便等。
所以,在电力拖动系统中经常 能够看到异步电动机的身影。
电子技术以及交流调速技术 的不断发展和逐渐成熟,极大地优化了异步电动机的调速 技能。
到现在为止,在许多工业电气自动化领域中,异步 电动机的电力拖动都得到了广泛运用。
以三相异步电动机 的机械特性作为基本出发点,文章对电动机的启动、制动 以及调速等方面进行了分析阐述。
1三相异步电动机的机械特性三相异步电动机的机械特性简单概括就是:在电动机的 定子电压、频率还有绕组参数不变的情况下,电动机的转速 或转差率与电磁转矩之间的关系,即n=f (T)或s=f(T)转速与转差率有某种程度上的对应关系。
机械特性可以用 函数来表示,也可以用曲线来表示。
用函数表达机械特性 曲线时有三种表达形式,包括物理表达式、参数表达式以 及实用表达式。
物理表达式描述的是异步电动机电磁转矩 是如何产生的,可知是因为主磁通与转子有功电流互相作 用得以产生的电磁转矩。
参数表达式描述的是电动机和电 源参数和电磁转矩的关系。
应用这一关系式,能够很便捷 地描述参数变化对电磁转矩以及人为特性的影响。
实用表 达式简单方便,有利于记忆,常常出现在工程计算中。
三相异步电动机的机械特性包括固有机械特性和人为 机械特性。
固有机械特性指的是异步电动机在工作时达到 额定电压和额定频率时,电动机按照正确的接线方式,在 定子还有转子中没有外接电容电抗电阻时得到的机械特性 曲线。
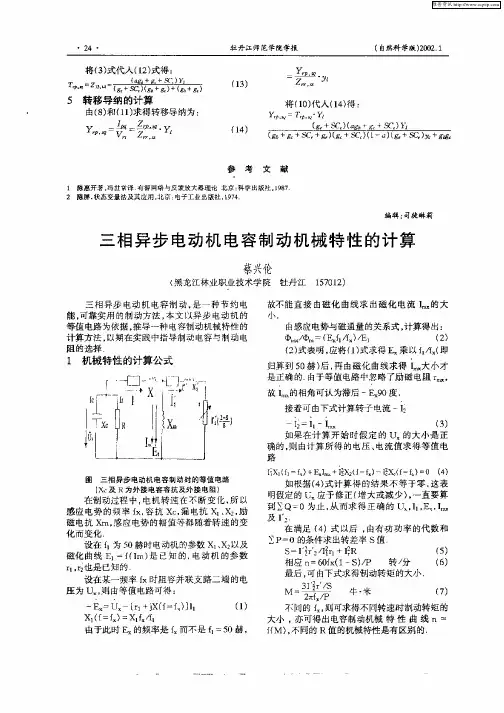
三相异步电动机的工作特性和参数测定原理简述一、基本方程式和等效电路异步电机定子绕组所产生的旋转磁场,以转差速度切割转子导体,在转子导体中感应电势,产生电流,转子导体中的电流与定子旋转磁场相互作用而产生电磁转矩,使转子旋转。
当转子的转速"与定子旋转磁场的转速®相等时,定、转子之间没有相对切割,转子中就没有电流,也就不能产生转矩。
因此转子的转速一定要异于磁场的转速,故称异步电机。
由于异步而产生的转矩称为异步转矩。
当时,为电动机运行;心叫时为发电机运行;当"0即转子逆着磁场方向旋转时,它是制动运行。
异步电机绝大多数都是作为电动机运行。
其转矩和转速(转差率)曲线,如图8-1所示。
由《电机学》中可知,将转子边的量经过频率折算和绕组折算,可得到异步电机的基本方程式为:s=tttt式中转差率&是异步电机的重要运行参数际*二为折算到定子一边的转子参数,也就是从定子上测得转子方面的数值。
由方程式可以画出相应的等效电路,如图8-2所示。
当异步电动机空载时,"対®,。
附加电阻。
图8-2中转子回路相当开路;当异步电动机堵转时附加电阻,图8-2转子回路相当短路,这就和变压器完全相同。
因此异步电机也可以通过空载实验和堵转(短路)实验来求出异步电机的等效电路中的各参数。
X —*(S-4)、空载实验由空载实验可以求得励磁参数丘护汎以及铁耗0珂和机械损耗戸门。
实验是 在转子轴上不带任何机械负载,转速,电源频率V"的情况下进行的。
用调压器改变试验电压大小,使定子端电压从(U3)S 逐步下降到°'3^左右,每次记录电动机的端电压久、空载电流珀和空载功率喘,即可得到异步电动机的空载特性珀'%=讯如所示。
图8-3空载特性图8-4铁耗和机械耗分离空载时,电动机的输入功率全部消耗在定子铜耗、铁耗和转子的机械损耗上。
所以从空载功率中减去定子铜耗,即得铁耗和机械耗之和用,即式中尽为定子绕组每相电阻值,可直接用双臂电桥测得。