三相异步电动机的制动
- 格式:ppt
- 大小:856.50 KB
- 文档页数:43
三相异步电动机能耗制动原理
三相异步电动机能耗制动原理
1. 三相电机反接制动
2. 能耗制动
三相异步电动机能耗制动
能耗制动与反接制动相⽐较,具有制动准确、平稳、能量消耗少等优点,因此得到⼴泛的应⽤,常常⽤在磨床、刨床及组合机床的主轴定位等。
那么能耗制动的⼯作原理⼜是怎样的呢?
简⾔之,就是当电动机切断交流电源后,⽴即在定⼦线圈绕组的任意两相中通⼊直流电,利⽤转⼦感应电流受静⽌磁场的作⽤以达到制动的⽬的。
⽐如220V电经过变压器再到整流桥变成直流通⼊给三相电机任意两相即可实现能耗制动。
能耗制动作⽤的强弱与通⼊直流⼤⼩和电动机转速有关,在同样的转速下电流越⼤制动作⽤越强。
⼀般所需直流电流为电动机空载电流的3-4倍。
制动电流⼤⼩可通过可调电阻R来调节。
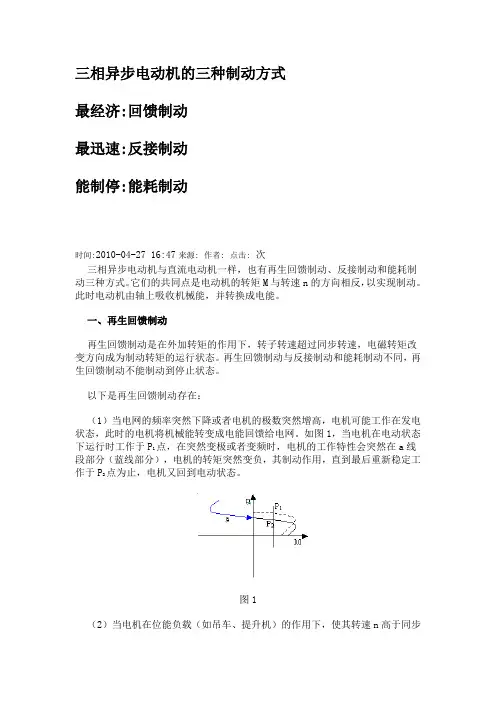
三相异步电动机的三种制动方式最经济:回馈制动最迅速:反接制动能制停:能耗制动时间:2010-04-27 16:47来源:作者:点击:次三相异步电动机与直流电动机一样,也有再生回馈制动、反接制动和能耗制动三种方式。
它们的共同点是电动机的转矩M与转速n的方向相反,以实现制动。
此时电动机由轴上吸收机械能,并转换成电能。
一、再生回馈制动再生回馈制动是在外加转矩的作用下,转子转速超过同步转速,电磁转矩改变方向成为制动转矩的运行状态。
再生回馈制动与反接制动和能耗制动不同,再生回馈制动不能制动到停止状态。
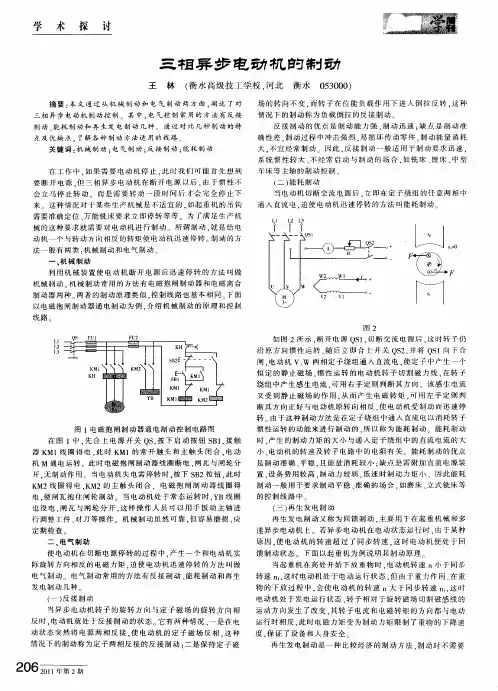
以下是再生回馈制动存在:(1)当电网的频率突然下降或者电机的极数突然增高,电机可能工作在发电状态,此时的电机将机械能转变成电能回馈给电网。
如图1,当电机在电动状态下运行时工作于P点,在突然变极或者变频时,电机的工作特性会突然在a线1段部分(蓝线部分),电机的转矩突然变负,其制动作用,直到最后重新稳定工作于P点为止,电机又回到电动状态。
2图1(2)当电机在位能负载(如吊车、提升机)的作用下,使其转速n高于同步转速n,此时,电机的输出转矩变负,电机由轴上吸收机械能,当电机的转矩(制0点),此动转矩)与负载的位能转矩相平衡时,电机既稳定运行(如图2中P3时电机以高于同步转速的速度运行。
在转子电路中串入不同的电阻,可得到不同的人为机械特性,并可得到不同的稳定速度,串入的电阻越大,稳定速度越高,一般在回馈制动时不串入电阻,以免转速过高。
图2二、反接制动反接制动是在电机定子三根电源线中的任意两根对调而使电机输出转矩反向产生制动,或者在转子电路上串接较大附加电阻使转速反向,而产生制动。
(1)电源两相反接的反接制动:点稳定运行,为使电机停转,将定子三根电源线中如图3所示,电机原在P1的任意两根对调,使旋转磁场反向,电机的转矩反向,起制动作用,电机运行在a线段。
当电机制动停止时,应及时将电机与电网分离,否则电机会反转。
电源两相反接反接制动的优点是制动效果强,缺点是能量损耗大,制动准确度差。
简述三相异步电动机能耗制动的原理
三相异步电动机能耗制动是一种常见的电动机制动方式,其原理基于电动机的反电动势和电磁感应现象。
在正常运行时,三相异步电动机通过供电系统提供的电源电压和频率驱动转子旋转。
当需要制动时,通常通过切断电源来停止电机的供电,但这样会导致电机突然停止,可能会对机械设备和电动机本身造成损坏。
为了解决这个问题,使用能耗制动可以将电机的动能转化为电能消耗。
当电机停止供电后,由于转子的旋转惯性,会产生一个反向电动势。
这个反向电动势会导致电流在电机内流动,从而产生电阻力矩,使电机逐渐减速并停止旋转。
具体来说,三相异步电动机在能耗制动时,通常将两个相线短接在一起,而第三个相线则通过一个制动电阻连接到电网上。
这样,当电机停止供电后,旋转的转子会产生一个反向电动势,这个电动势会引起电流在两个短接的相线之间流动。
由于制动电阻的存在,电机产生的电流会通过电阻消耗电能,并逐渐减速直至停止。
需要注意的是,能耗制动时会产生大量的热量,所以需要使用能承受高温的制动电阻,并同时配备适当的散热措施以防止过热。
总之,三相异步电动机能耗制动的原理是利用电机的反电动势和电磁感应现象,将电机的动能转化为电能消耗,通过短接两个相线和连接制动电阻的方式来实现电机的减速和停止。
这种制动方式可以避免电机突然停止带来的损坏,并减少对机械设备的冲击。
三相异步电动机的制动控制制动:就是给电动机一个与转动方向相反的转矩使它迅速停转(或限制其转速)。
制动的方法一般有两类:机械制动和电气制动。
机械制动:利用机械装置使电动机断开电源后迅速停转的方法叫机械制动。
机械制动常用的方法有:电磁抱闸和电磁离合器制动。
电气制动:电动机产生一个和转子转速方向相反的电磁转矩,使电动机的转速迅速下降。
三相交流异步电动机常用的电气制动方法有能耗制动、反接制动和回馈制动。
一、反接制动1.反接制动的方法异步电动机反接制动有两种,一种是在负载转矩作用下使电动机反转的倒拉反转反接制动,这种方法不能准确停车。
另一种是依靠改变三相异步电动机定子绕组中三相电源的相序产生制动力矩,迫使电动机迅速停转的方法。
反接制动的优点是:制动力强,制动迅速。
缺点是:制动准确性差,制动过程中冲击强烈,易损坏传动零件,制动能量消耗大,不宜经常制动。
因此反接制动一般适用于制动要求迅速、系统惯性较大,不经常启动与制动的场合。
2.速度继电器(文字符号KS)速度继电器是依靠速度大小使继电器动作与否的信号,配合接触器实现对电动机的反接制动,故速度继电器又称为反接制动继电器。
感应式速度继电器是靠电磁感应原理实现触头动作的。
从结构上看,与交流电机类似,速度继电器主要由定子、转子和触头三部分组成。
定子的结构与笼型异步电动机相似,是一个笼型空心圆环,有硅钢片冲压而成,并装有笼型绕组。
转子是一个圆柱形永久磁铁。
速度继电器的结构原理图速度继电器的符号速度继电器的轴与电动机的轴相连接。
转子固定在轴上,定子与轴同心。
当电动机转动时,速度继电器的转子随之转动,绕组切割磁场产生感应电动势和电流,此电流和永久磁铁的磁场作用产生转矩,使定子向轴的转动方向偏摆,通过定子柄拨动触头,使常闭触头断开、常开触头闭合。
当电动机转速下降到接近零时,转矩减小,定子柄在弹簧力的作用下恢复原位,触头也复原。
常用的感应式速度继电器有JY1和JFZ0系列。
JY1系列能在3000r/min的转速下可靠工作。
对三相异步电动机的机械特性启动制动与调速的总结
三相异步电动机是一种常用的电动机类型,具有机械特性启动、制动和调速的特点。
下面是对三相异步电动机的机械特性启动、制动和调速的总结:
1. 机械特性启动:
三相异步电动机通过旋转磁场的作用,使转子在磁场的作用下旋转,从而完成机械特性启动。
机械特性启动时,电流较大,容易产生电磁瞬变和热损耗,因此需要采取措施减少其影响。
常用的方法有:阻抗启动、星角启动、自耦启动、电容启动等,其中阻抗启动和星角启动是较为常用的方法。
2. 机械特性制动:
机械特性制动是指通过改变电源的供电方式,使电动机磁场反转,从而使电动机逆向运转,达到减速、停止的目的。
机械特性制动时,需要考虑电动机回转的问题,为此可以采用反电动势励磁制动和短路制动等。
3. 调速:
三相异步电动机的调速方式有很多种,包括电压调速、变频调速、极对数调速、转子电流调速、波形调速等。
其中,变频调速是目前最为成熟的调速方法,可以实现宽范围的调速控制,且对电机影响小,控制稳定性好。
总之,三相异步电动机的机械特性启动、制动和调速等方面是该电机应用时需要注意的关键问题。
选择适当的启动和制动方法,以及合适的调速方式,可以提高电机的运行效率,并延长其使用寿命。
三相异步电动机能耗制动原理
三相异步电动机的能耗制动原理是通过将电动机的转子绕组接入电网,利用电网的能量来制动电动机。
具体原理如下:
1. 异步电动机在运行时,由于电动机的输出功率大于负载的需求功率,电动机会将多余的功率转化为机械能,从而实现驱动负载。
而在能耗制动下,电动机需要将多余的功率转化为电能,通过电网耗散掉。
2. 当电动机进行能耗制动时,将电动机的转子绕组与电网相连。
根据转子绕组的连接方式,能耗制动可分为串联能耗制动和并联能耗制动两种方式。
a. 串联能耗制动方式:将转子绕组串联到电网上,使得电动
机的转子与电网同频运行。
由于电动机的转速略低于同步速度,电机输出的是负功率,将功率传送到电网中。
b. 并联能耗制动方式:将转子绕组并联在电网上,使得电动
机的转子电流与电网电流相位相差180度。
这样电动机的转子失去了能源引起的转动力矩,使其自动停转,电能通过转子绕组流向电网。
3. 通过连续地将多余的能量传送到电网中,电动机的转动速度逐渐减小,直至停止转动。
这样就实现了对电动机的耗散制动。
值得注意的是,能耗制动产生的电能需要通过电网耗散掉,因此在实际应用中需要考虑电网的负载能力和电动机的安全性能。
三相异步电动机的制动
1、能耗制动
在断开三相电源的一同,给电动机其间两相绕组通入直流电流,直流电流构成的固定磁场与旋转的转子效果,发作了与转子旋转方向相反的转距(制动转距),使转子活络接连翻滚。
2、反接制动
泊车时,将接入电动机的三相电源线中的恣意两相对调,使电动机定子发作一个与转子翻滚方向相反的旋转磁场,然后取得所需的制动转矩,使转子活络接连翻滚。
3、发电反响制动
当电动机的nn0时,旋转磁场发作的电磁转矩效果方向发作改动,由驱动转矩变为制动转矩。
电动机进入制动状况,一同将外力效果于转子的能量改换成电能回送给电网。
1。
三相异步电动机制动方式
三相异步电动机的制动方式主要有以下几种:
1. 直接制动:即电动机的定子绕组通电,但转子不转动。
这种制动方式适用于制动时需要较大的制动力矩的情况,如电梯制动等。
2. 动态制动:将电动机的定子绕组接通外部电阻或电抗,使电动机减速至停止。
动态制动又分为旁路制动和串联制动两种方式。
旁路制动是将外部电阻或电抗与电动机的定子绕组并联,串联制动则是将外部电阻或电抗与电动机的定子绕组串联。
动态制动的优点是可以调整制动力矩,适用于制动时需要提供可调制动力矩的情况。
3. 动态制动加感应制动:将动态制动的电阻或电抗与电动机的定子绕组并联,同时通过感应制动装置将电动机的定子绕组接入外部电抗,从而实现制动。
这种制动方式不仅可以提供较大的制动力矩,还可以实现能量回收,提高能量利用率。
综上所述,三相异步电动机的制动方式多种多样,可以根据具体要求选择合适的制动方式。