工业机器人及软件 .doc
- 格式:doc
- 大小:2.53 MB
- 文档页数:68
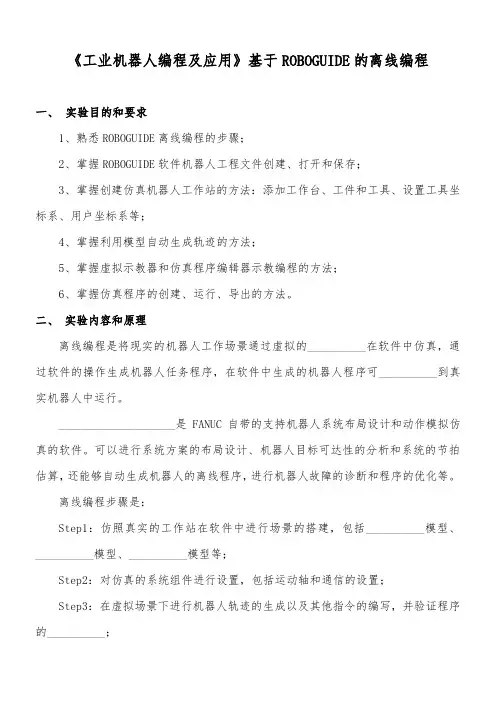
《工业机器人编程及应用》基于ROBOGUIDE的离线编程一、实验目的和要求1、熟悉ROBOGUIDE离线编程的步骤;2、掌握ROBOGUIDE软件机器人工程文件创建、打开和保存;3、掌握创建仿真机器人工作站的方法:添加工作台、工件和工具、设置工具坐标系、用户坐标系等;4、掌握利用模型自动生成轨迹的方法;5、掌握虚拟示教器和仿真程序编辑器示教编程的方法;6、掌握仿真程序的创建、运行、导出的方法。
二、实验内容和原理离线编程是将现实的机器人工作场景通过虚拟的__________在软件中仿真,通过软件的操作生成机器人任务程序,在软件中生成的机器人程序可__________到真实机器人中运行。
____________________是FANUC自带的支持机器人系统布局设计和动作模拟仿真的软件。
可以进行系统方案的布局设计、机器人目标可达性的分析和系统的节拍估算,还能够自动生成机器人的离线程序,进行机器人故障的诊断和程序的优化等。
离线编程步骤是:Step1:仿照真实的工作站在软件中进行场景的搭建,包括__________模型、__________模型、__________模型等;Step2:对仿真的系统组件进行设置,包括运动轴和通信的设置;Step3:在虚拟场景下进行机器人轨迹的生成以及其他指令的编写,并验证程序的__________;Step4:将导出的程序导入到真实的机器人中运行。
软件的__________功能通过在仿真软件上示教三个不是同一直线上的点和实际环境里同样位置的三个点位后,生成偏移数据,通过计算实际与仿真的偏移量,进而可以自动的对程序和目标模型进行位置修改。
三、主要仪器设备____________________软件;电脑1台。
四、操作方法与实验步骤如图1所示,在其他三维软件中制作一个汉字模型,以igs格式导出,并以工件的形式导入到ROBOGUIDE中。
在ROBOGUIDE中进行识别,自动规划汉字的轨迹,从而生成完整的机器人切割程序。

工业机器人学习资料发那科机器人WeldPro操作手册第一章概述1.1. 软件安装正确安装ROBOGUIDE_6.406912 rev F ,先安装安装盘里的SimPRO,选择需要的虚拟机器人的软件版本。
安装完SimPRO 后再安装WeldPro。
安装完,会要求注册;若未注册,有30天的时间限制。
需要伺服连动的,在安装MultiRobotArcPackage文件夹里面的setup,才能有1A05B-2500-J686 Coord Motion Package 变位机协调功能1.2. 新建Workcell的步骤1.2.1. 新建在Name 一栏输入文件名,文件名要以字母开头。
第一项是根据默认的配置新建;第二项是根据上次使用的配置新建;第三项是根据机器人备份文件来创建;第四项是根据已有机器人的拷贝来新建;一般都选用第一项。
选择机器人的软件版本:V6.** 是针对R-J3iB 控制器,V7.**是应用在R-30iA控制器的。
现在销售的机器人都是R-J3iA控制器的。
选择机器人的应用软件:一般选用ArcTool ( H541 )选择合适的机型,如果选型错误,造成焊接位置达不到,可以在创建之后再更改。
然后选择Group2 ~7的设备:该实例中选了两个Positioners(变位机),如果没有类似设备,就无需在此页上做任何选择。
根据所需,选择相应的选项功能软件。
以下列出一些弧焊中常用的选项功能:1A05B-2500-H871 ARC Positioner FANUC二轴变位机1A05B-2500-J511 TAST Arc Sensor1A05B-2500-J518 Extended Axis Control 行走轴1A05B-2500-J526 AVC 弧压控制1A05B-2500-J536 Touch Sensing 接触传感1A05B-2500-J605 Multi Robot Control 多机器人控制,Dual Arm中用1A05B-2500-J601 Multi-Group Motion 多组控制,有变位机,必须选1A05B-2500-J617 Multi Equipment 多设备,Tamdem Mig中用1A05B-2500-J613 Continuous Turn 连续转,1A05B-2500-J678 ArcTool Ramping 焊接参数谐波变化1A05B-2500-J686 Coord Motion Package 变位机协调功能1.2.2.添加附加轴软件设置如果有附加轴(Positioner,Rail),则需要完成这一步。
XXXX职业技术学院《工业机器人技术及应用》课程标准一、课程代码120801二、适用专业工业机器人技术、机械自动化等专业三、课程性质《工业机器人技术及应用》是我院工业机器人技术专业核心课程。
是一门综合性较强的学科,主要讲授机器人技术及应用的基本知识、基本理论和基本方法。
在工业机器人技术专业培养计划中,它起着至关重要的作用,使学生对已学知识有了更好的掌握,培养学生综合应用的能力。
对实现电气类专业人才培养目标,对工业机器人技术专业学生综合职业能力的培养和职业素养的养成起到主要的支撑作用。
《工业机器人技术及应用》的先修课程为《电工基础》、《电子技术》等。
后续课程为:《PLC技术应用》、《机器人自动线安装与调试》、《毕业设计》。
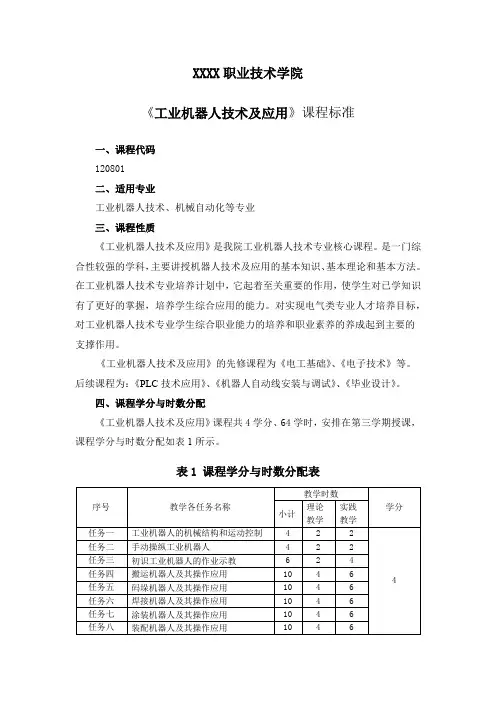
四、课程学分与时数分配《工业机器人技术及应用》课程共4学分、64学时,安排在第三学期授课,课程学分与时数分配如表1所示。
表1 课程学分与时数分配表五、课程设计思路本课程设计的思路为:1.本课程以岗位能力需求为导向,以典型实际机器人为载体,设计学习任务, 将机器人知识应用到具体生产生活服务工作中。
通过实施任务教学,提高学生的学习兴趣,有效地培养和提高学生在机器人技术方面的专业能力、方法能力和社会能力,并使学生养成良好的职业态度。
2.课程内容以学生就业所需的专业知识和操作技能为着眼点,力求提高学生的实际运用能力,使学生更好地适应社会需求。
3.教学内容按照由浅入深、循序渐进的原则进行设计安排,使学生的职业能力培养目标由低到高的方向转变。
4.以提高学生综合素质为基础,以提高学生综合职业能力为目标,组织实施任务驱动教学等行动导向的教学模式。
5.教学评价多元化,本课程为考试课程,期评成绩以平时成绩、技能考核成绩和笔试成绩按比例评定,具体分配情况为:期评成绩=平时成绩×20%+技能考核成绩×40%+笔试成绩×40%。
六、课程总体目标(一)知识目标1.了解机器人技术发展的概况;2.了解机器人的基本构造特征及状态描述;3.了解机器人坐标系统,掌握坐标系的相互转化;4.掌握机器人位置运动学、速度运动学和动力学的相关知识;5.具有运用自动化相关理论,综合解决问题的能力。
工业机器人操作指南一、机器人操作前准备1.工作环境确认:确保工作环境干燥、通风良好,没有明显的震动和噪音干扰,并保持清洁,以防止机器人受到尘埃和杂物的干扰。
2.系统电源准备:检查机器人的电源是否正常接入,并确保电源电压符合要求。
3.资源准备:检查所需的工具、备用零件和其他必要的资源是否在就位,以便在需要时能够迅速进行维护和更换。
4.安全措施:确保机器人周围的安全装置和防护设施完好无损,并提醒操作人员遵守相关的安全操作规程。
二、机器人的基本操作1.开机与关机:按照操作手册的指示,正确地开启和关闭机器人,以确保其正常运行和安全停机。
2.控制模式切换:根据需要,切换机器人的自动模式、手动模式或示教模式,以满足不同的工作要求。
3.应急停止:掌握机器人的应急停止按钮的位置和使用方法,以应对突发情况。
4.示教操作:使用机器人的示教装置,根据工艺要求输入或记录轨迹和操作动作,以便机器人能够按照预定的路径和动作进行工作。
5.程序运行:按照设定好的程序,启动机器人的自动运行,确保执行过程中没有异常情况发生。
6.运动控制:掌握机器人运动控制的方法,包括轴控制和坐标系控制,以便对机器人的运动进行精确控制。
7.状态监控:时刻关注机器人的状态显示,包括工作状态、报警信息和运行参数,以便及时发现并解决问题。
三、机器人的安全操作1.安全区域设置:确定机器人的安全区域,并采取相应的措施,包括设立栅栏、安装光幕或设置软件限制区域,以保护周围的人员和设备免受机器人的伤害。
2.急停按钮:了解机器人的急停按钮的位置和使用方法,并随时准备按下急停按钮,以应对紧急情况。
3.人机合作:在进行人机合作操作时,确保与机器人的接触安全和可靠,避免受伤。
4.操作规范:操作人员应严格遵守机器人的操作规程和安全操作指南,避免任何不正确的操作和违反规定的行为。
四、机器人的日常维护1.清洁保养:定期清洁机器人的表面和关键部件,移除尘埃和杂物,保持机器人的良好工作状态。
工业机器人的技术发展与创新在当今工业领域,随着科技的不断进步,工业机器人的应用已经成为提高生产效率和质量的重要手段。
工业机器人是指能够自动执行生产任务的机器人系统,它通过使用复杂的传感器和计算技术,能够完成各种重复性、高精度和危险的工作。
本文将探讨工业机器人技术的发展与创新,从硬件、软件和智能化等方面进行论述。
一、硬件的创新与发展工业机器人的硬件技术是支撑其运行的基础,随着科技的不断进步,硬件方面也取得了许多创新。
首先是机器人的结构设计,过去,机器人的结构主要是基于传统的机械设计,刚性和重量较大。
现在,随着轻型化和柔性化的要求增加,机器人的结构设计也发生了很大变化,采用了先进的材料和特殊的结构,使得机器人更加轻巧、柔软和易于操作。
其次是机器人的传感器技术,传感器是机器人实现感知和控制的关键。
随着传感器技术的创新,机器人的感知能力得到了大幅度提升。
例如,通过使用先进的视觉传感器和图像处理算法,机器人可以实现更精确的目标识别和跟踪。
此外,还有力、压力、温度等传感器的应用,提高了机器人对环境和工件的感知能力,为实现更精细和复杂的操作打下了基础。
最后是机器人的执行器和驱动技术,执行器和驱动技术直接影响机器人的动作能力和灵活性。
传统的液压和气动执行器已经逐渐被电动执行器所取代,电动执行器具有体积小、控制精度高、响应速度快等优势。
同时,新型的驱动技术,如无刷电机和伺服控制系统,为机器人提供了更高的精度和效率,使得机器人的运动更加灵活和准确。
二、软件的创新与发展除了硬件方面的创新,工业机器人的软件技术也在不断发展。
软件是控制机器人运行和执行任务的关键,而且软件技术也决定了机器人的智能水平和操作效率。
工业机器人软件的创新主要体现在以下几个方面。
首先是机器人编程技术的改进。
过去,机器人编程主要依赖专业人员进行,编程时间长、复杂度高。
现在,借助图形化编程、离线编程和自适应编程等技术的发展,非专业人员也能够进行简单的机器人编程,并且编程效率和可靠性得到了大大提升。
1 主要介绍以下七种仿真平台(侧重移动机器人仿真而非机械臂等工业机器人仿真):1.1 USARSi m-Unifie d System for Automa tionand RobotSimula tionUSARSi m是一个基于虚拟竞技场引擎设计高保真多机器人环境仿真平台。
主要针对地面机器人,可以被用于研究和教学,除此之外,USARSi m是Rob oCup救援虚拟机器人竞赛和虚拟制造自动化竞赛的基础平台。
使用开放动力学引擎ODE(Open Dynami cs Engine),支持三维的渲染和物理模拟,较高可配置性和可扩展性,与Player兼容,采用分层控制系统,开放接口结构模拟功能和工具框架模块。
机器人控制可以通过虚拟脚本编程或网络连接使用UDP协议实现。
被广泛应用于机器人仿真、训练军队新兵、消防及搜寻和营救任务的研究。
机器人和环境可以通过第三方软件进行生成。
软件遵循免费GPL条款,多平台支持可以安装并运行在Linux、Window s和Mac OS操作系统上。
1.2 SimbadSimbad是基于Ja va3D的用于科研和教育目的多机器人仿真平台。
主要专注于研究人员和编程人员热衷的多机器人系统中人工智能、机器学习和更多通用的人工智能算法一些简单的基本问题。
它拥有可编程机器人控制器,可定制环境和自定义配置传感器模块等功能,采用3D虚拟传感技术,支持单或多机器人仿真,提供神经网络和进化算法等工具箱。
软件开发容易,开源,基于GNU协议,不支持物理计算,可以运行在任何支持包含Java3D库的Ja va客户端系统上。
1.3 WebotsWebots是一个具备建模、编程和仿真移动机器人开发平台,主要用于地面机器人仿真。
工业机器人报告工业机器人是一种能够自动执行工业任务的机器人系统。
它们通常用于制造业,可以执行各种重复性、危险性或无聊的任务,如焊接、涂装、装配、处理、检测和包装。
工业机器人的出现极大地提高了生产效率,降低了成本,同时也减少了人力资源的浪费,因此在现代制造业中扮演着非常重要的角色。
首先,工业机器人的应用领域非常广泛。
它们可以用于汽车制造、电子产品制造、医药制造、食品加工等多个行业。
在汽车制造业中,工业机器人可以完成车身焊接、喷漆、总装等工序,大大提高了汽车生产线的效率和质量。
而在电子产品制造业中,工业机器人可以完成精密组装、检测等工序,确保了产品的一致性和稳定性。
其次,工业机器人的技术不断创新。
随着人工智能、机器视觉、传感器技术的不断发展,工业机器人的智能化水平不断提高。
现代工业机器人已经具备了自主学习、自主识别、自主决策的能力,可以根据环境的变化自动调整工作模式,适应不同的生产需求。
这些技术的应用使得工业机器人能够更加灵活、高效地完成各种任务,为制造业的发展带来了新的动力。
另外,工业机器人的发展也面临着一些挑战。
首先是成本问题,目前工业机器人的价格仍然较高,导致一些中小型企业难以承担。
其次是技术标准和安全标准的统一问题,不同的国家和地区对于工业机器人的技术标准和安全标准存在一定的差异,这给跨国企业的生产和管理带来了一定的困难。
综上所述,工业机器人作为现代制造业的重要组成部分,发挥着越来越重要的作用。
随着技术的不断创新和发展,工业机器人的应用范围将会更加广泛,智能化水平将会更加高效,成本将会更加合理。
相信在不久的将来,工业机器人将会成为制造业的主力军,为全球制造业的发展注入新的活力。
工业机器人结构设计00(陕理工机械工程学院机自专业000班,陕西汉中 723003)指导教师:000[摘要]本文简要介绍了工业机器人的概念,机器手硬件和软件的组成,即plc控制的机械手的系统工作原理,机械手各个部件的整体尺寸设计,plc控制的特点.本文对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。
同时设计了机械手的夹持式手部结构,设计了机械手的手腕结构,计算出了手腕转动时所需的驱动力矩和回转气缸的驱动力矩。
设计了机械手的手臂结构.利用可编程序控制器对机械手进行控制,选取了合适的plc型号,根据机械手的工作流程制订了可编程序控制器的控制方案,画出了机械手的工作时序图,并绘制了可编程序控制器的控制程序。
[关键词]工业机器人机械手The Industrial robot design000(Grade00,Class00,Major Mechanical Design,Manufacturing and Automation,415Dept。
,Shaanxi University of Technology,Hanzhong 723003,Shaanxi)Tutor:000Abstract This paper introduces the concept of the composition of industrial robots,robot hardware and software, system working principle that plc manipulator control, the overall size of the various components of the robot design, plc control characteristics. In this paper,the robot overall program design,to determine the coordinates of the robot forms and degrees of freedom to determine the technical parameters of the robot. While the design of the hand gripping structure of the robot type,the design of the structure of the robot wrist,the wrist required to calculate the rotation of the driving torque and driving torque of the rotary cylinder。
1绪论1.1工业机器人概述工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
特别适合于多品种、变批量的柔性生产。
它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域.机器人应用情况,是一个国家工业自动化水平的重要标志。
机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力。
从某种意义上说它也是机器进化过程的产物,它是工业以及非工业领域的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。
机械手是模仿人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
在工业生产中应用的机械手被称为“工业机械手”。
工业机械手可以提高生产的自动化水平和劳动生产率;可以减轻劳动强度、保证产品质量、实现安全生产,尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,由它代替人进行正常的工作,意义更为重大.因此,工业机械手在机械加工、冲压、铸、锻、焊接、热处理、电镀、喷漆、装配以及轻工业、交通运输业等方面得到越来越广泛的应用.工业机械手的结构形式开始比较简单专用性较强,仅为某台机床的上下料装置,是附属于该机床的专用机械手。
随着工业技术的发展,制成了能够独立的按程序控制实现重复操作,适用范围比较广的“程序控制通用机械手”,简称通用机械手。
由于通用机械手能很快的改变工作程序,适应性较强,所以它在不断变换生产品种的中小批量生产中获得广泛的应用。
1.2工业机器人的组成和分类1。
工业机器人实验指导书工业机器人现场教学实验一工业机器人认知部分1.实验目的1)了解各种机器人;2)了解FANUC ARC Mate 100iB机器人系统组成;3)介绍机器人试教编程,进行机器人动作演示;2。
实验器材1)日本FANUC ARC Mate 100iB 焊接机器人一台,ABB机器人两台,众为兴机器人一台,导管架焊接机器人一台,爬壁式机器人一台2)工控计算机,ABB公司ROBOTSTUDIO离线编程软件一套3.实验原理1)Fanuc机器人简介✧机器人的主要参数FANUC机器人本体型号为ARC Mate M6iB,控制柜型号为M—6iB。
机器人的具体性能参数如下:轴数:6手部负重(kg):6运动范围:重复定位精度:最大运动速度✧FANUC 机器人的安装环境环境温度:0—45 摄氏度环境湿度:普通:75%RH短时间:85%(一个月之内)振动:=0。
5G(4。
9M/s2)✧FANUC 机器人的编程方式在线编程离线编程✧FANUC 机器人的特色功能High sensitive collision detector 高性能碰撞检测机能,机器人无须外加传感器,各种场合均适用Soft float 软浮动功能用于机床工件的安装和取出,有弹性的机械手。
Remote TCP2)FANUC 机器人的构成✧FANUC 机器人软件系统图2 电焊机Power Wave F355iHandling Tool 用于搬运 Arc Tool 用于弧焊 Spot Tool 用于点焊 Sealing Tool 用于布胶 Paint Tool 用于油漆Laser Tool 用于激光焊接和切割FANUC 机器人硬件系统如图15所示,通用FANUC 机器人硬件系统包括:机器人本体、机器人控制柜、操纵台(或变位器)和示教操作盒。
(a ) FANUC 机器人组成 (b) 机器人控制柜内部结构图1 FANUC 机器人硬件系统作为焊接机器人的Fanuc ArcMate 100iB 机器人除了具有通用机器人的组件外,还包括焊接所需的各个组件:Power Wave F355i :如图2适合材料: 碳钢/不锈钢/合金钢/铝合金 焊接波型: CV/Pulse/Rapid Arc/ Power Mode/Pulse on Pulse 电流范围: 5—425A , 300A/100%, 350A/60% 波型控制技术:Wave Control Technology TM 通讯方式: ArcLink ®逆变技术: Inverter (60kHz ) 全数字焊机: Total Digital输入电源: 380V/50Hz/3Phase/PE Power Feeder 10R适合焊丝: 实芯/药芯/铝焊丝 速度反馈装置,闭环精确控制. 四轮驱动,更换焊丝不需工具 通讯方式: ArcLink ® 输入: 40V DC送丝速度范围: 50-800IPM(1.3-20.3m/min ) 70—1200IPM(2。
③Ena bleJF工业机器人应用一机器人示教单元使用1.示教单元的认识1:EMG.STOP]开关关闭伺服,机器人直接停止。
②TBENABLE]开关切换示教单元键的操作为有效或无效。
©SERVO]键一边轻握住[enableswitch]—边押上此键的话,机器入伺服ON。
⑫MONITOR]键按下此键则,变成监视模式且显示监视MENU。
⑬JOG]键按下此键则,变成JOG模式且显示JOG画面。
0抓手]键按下此键则,变成抓手操作模式且显示抓手操作画面。
⑮[CHARACTER]键示教单元在可输入文字或数字时,[数字/文字]键的功能可以换数字输入及文字输入。
®[RESET]键解除异警。
边押下此键再押下[EXE]键,执行程序重首。
⑰[t][iHTT键移动光标到各个方向o⑱CLEAR]键•在可以数宇输入或文宇输文时,押下此键的话可以将1个文宇删除。
⑲EXE]键确定输入操作。
另外,直接执行时,持续押下此键时,机器人动作。
⑳数字/文字]键在可数字输入或文字输入时,押下此键的话可以显示数字或文字。
2.使用示教单元调整机器人姿势2.1在机器人控制器上电后使用钥匙将MODE开关打到“MANUAL”位置,双手拿起,先将示教单元背部的“TEENAELE”按键按卞。
再用手将“enable”开关扳向一侧,直到听到一声“卡嗒”为止。
然后按下面板上的“SERVO”键使机器人伺服电机开启,此时作3”32.2按下面板上的"JOG"键,进入关节调整界面,此时按动J1-J6关节对应的按键可使机器人以关节为运行。
按动“OVRDt”和“OVRDI”能分别升高和降低运行机器人速度。
各轴对应动作方向好卞图所示。
当运行超出各轴活动范鬧时发出持续的“嘀嘀”报警声。
2・3按"Fl\"F2\a F3\“F4”键可分别进行“直交调整”、“TOOL调整”、“三轴直交调整”和“圆桶调整”模式,对应活动关系如下各图所示:+Z-Z+z三轴直交调整模式+Z八-Z圆桶调整模式2.4在手动运行模式卞按“HAND”进入手爪控制界面。
广州城建职业学院综合实训报告课程名称:《工业机器人编程、仿真及调试》实训项目:手动操纵ABB工业机器人学生姓名:***学生学号: **********所在班级: 15机电4班指导教师:***机电工程学院2017-2018学年第1学期实训项目 手动操纵工业机器人一、学习准备1.主要设备:工业机器人2.学习资料:安全操作规程、工作页、多媒体设备、焊接手册;3.劳动保护用品:工作服、电焊手套、面罩、绝缘鞋、滤光玻璃二、学习过程引导问题:1.请同学们查阅资料并写出手动模式下可以进行微动控制,无论“示教器”上显示什么视图都可以进行微动控制,但在程序执行过程中无法进行微动控制。
答:微动控制就是使用 FlexPendant 控制杆手动定位或移动机器人或外轴。
什么时候可以微动控制? 手动模式下可以进行微动控制。
无论 FlexPendant 上显示什么视图都可以进行微动控 制,但在程序执行过程中无法进行微动控制。
关于动作模式和机器人 选定的动作模式和 / 或坐标系确定了机器人移动的方式。
在线性动作模式下,工具中心点沿空间内的直线移动,即 " 从 A 点到 B 点移动 " 方 式。
工具中心点按选定的坐标系轴的方向移动。
在逐轴模式下,一次只能移动一根机器人轴。
因此很难预测工具中心点将如何移 动。
关于动作模式和附加轴 附加轴只能进行逐轴微动控制。
附加轴可设计为进行某种线性动作或旋转 (角)动 作的轴。
线性动作用于传送带,旋转动作用于各种工件操纵器。
附加轴不受选定的坐标系影响。
关于坐标系 如果工具坐标系的其中一个坐标与钻孔平行,则能轻而易举地使用机械爪将销子定 位于钻孔内。
在基坐标系中执行同样的任务时,可能需要同时在 x 、和 z 坐标进行微 动控制,从而增加了精确控制的难度。
选择合适的坐标系会使微动控制容易一些,但对于选择哪一种坐标系并没有简单或 唯一的答案学习目标:1、掌握各轴的运动规律;2、熟练使用机器人的三种运动方式;3、能够使用示教器摇杆熟练控制机器人各轴运动;4、能够使用增量控制机器人的步进运动;5、培养学生认真细致的工作态度;建议学时:学习地点:一体化学习工作站2. 通过观察机器人的移动方式及将其下表填写:动作模式控制杆图示说明轴 1-3 模式机器人的1、2、3轴必须单独运动,没有联动关系。
标段一工业机器人及软件
三、台式计算机(31台)
1、处理器:
CPU系列英特尔酷睿i5 4代系列
CPU型号Intel 酷睿i5 4570
CPU频率3.2GHz
最高睿频3600MHz
总线规格DMI 5 GT/s
缓存L3 6MB
核心架构Haswell
核心/线程数四核心/四线程
2、存储设备:内存容量4GB ,内存类型DDR3 1600MHz,硬盘容量1TB,硬盘描述7200转,光驱类型DVD-SuperMulti双层刻录。
3、显卡/声卡:显卡类型独立显卡,显存容量1GB,DirectX 11。
4、显示器:显示器尺寸20英寸,显示器描述LED宽屏。
5、网络通信:有线网卡1000Mbps以太网卡。
6、I/O接口:数据接口6×USB2.0+2×USB3.0,音频接口耳机输出接口,麦克风输入接口,视频接口VGA,HDMI,DVI,网络接口RJ45(网络接口),其它接口电源接口,S/PDIF输出接口, Pci接口 2个以上。
三、六边形电脑桌(4个)
六边形电脑桌规格:对角线1600mm,边长800mm,高度为780mm,桌面材料使用20mm环保高密度双贴面板,环保优质PVC封边,防水耐磨。
柜体采用钢制结构,主机箱为0.6mm优质冷轧板一次冲压而成,左右后三面有网孔。
桌腿采用25*25mm方管制作而成,壁厚1.0 mm,钢质部分经过酸洗磷化静电喷塑而成。
桌面预留穿线孔,主机箱带锁。
参考图例
四、学生三爪圆凳(40个)
学生三爪圆凳规格:材质:塑钢结构。
圆凳结构:高度为460 mm,凳面为ABS凳面,凳面直径300 mm。
凳脚采用1.2mm优质钢板冲压成型焊接而成,增强圆凳的稳定性。
特制脚垫塑胶防滑套,采用铆钉钉牢方式,不易脱落,紧扣螺丝帽。
中管采用厚1.5mm无缝钢管,50mm直径中管立柱,焊接处装饰脚套。
中管立柱安装密封件,美观实用。
托盘采用2mm 优质钢板,牢固耐用。
焊接部分全部采用二氧化碳保护焊接,铁件部分表面经酸洗磷化处理后喷涂环氧树脂,不脱漆不掉色。
参考图例
五、可移动不锈钢电脑桌(7个)
产品规格: 深450 X 长600 X 高800 mm,整体采用不锈钢304光亮板原材料,板厚度1 mm,配合38 X 38mm方管焊接而成,面板至键盘托板之间100 mm,键盘托板部分采用双滑轨制作,随意抽拉,键盘托板至底层之间450 mm,能放电脑主机箱,底部安装4寸导电轮,能制动,桌面预留穿线孔。
参考图例
标段二3D打印机及扫描仪
2.处理器: Core i5-4590(
3.3G/6M/4核)
3.主板芯片组:不低于Intel 85系列
4.内存:≥4G
5.内存槽:≥4个,最大支持32GB
6.硬盘:≥500G
7.显卡:独立显卡≥1G
8.键盘鼠标:防水抗菌键盘鼠标
9.串口:串口≥1
B接口:不少于8个USB接口,其中USB3.0不少于2个
11.读卡器:内置多合一读卡器
12.显示器: 21.5英寸宽屏液晶显示器
13.机箱:全黑色机身立式机箱≥20L,并内置扬声器
14.电源:不低于290W 电源
7 工作台技术参数
1.钢木方桌
2.金属钢管腿架
3.热压三聚氰胺板面,底材刨花板和中纤板≥1200*600*750
4.面板厚度:≥25mm
5.腿架钢管直径:≥35mm
6.腿架钢管壁厚:≥1mm
7.钢管表面经酸洗磷化处理后喷涂环氧树脂,不脱漆不掉色。
参考图例
9张
8 学生凳技术参数
1.尺寸规格≥230mm*340mm*440mm(长*宽*高)
2.支架为≥1mm厚,截面尺寸≥20mm*20mm方形钢管,表面经过除锈,磷
化,打磨,喷涂环氧树脂
3.桌脚配有高稳固防护套,防止噪音,避免刮伤地板
4.凳面材料为热压三聚氰胺板面,底材刨花板和中纤板
参考图例
15把
9 样品展示
柜
技术参数
1.框架高强度三合板加铝合金
2.推拉式柜门,柜门材料为有机玻璃,高≥136cm
3.柜子下部为储物格,高度≥42cm
4.展示柜背部带有镜面
5.展示柜内带有LED灯
6.展示柜正面展示
7.尺寸:宽≥1000 mm ,高≥2000 mm ,厚≥40mm
参考图例
2台
10 文化墙技术参数
1.3D打印文化墙建设,展示出一定的文化特性或文化精神的装饰墙,方
便学生实习实训学习
2.60cm*80cm亚克力展示板≥5套
3.72cm*12cm实验实训室高端亚克力门牌≥1个
4.立式展示牌≥4块长*宽:30cm*25cm 高100cm
5.文化展示包括软硬件的详细介绍
6.文化展示包括软硬件的详细操作规范
1套
标段三录播教室
标段四汽车检测拆装与维修设备
11 轮胎平衡
仪
设备参数:
工作电压:220-240V
轮毂直径:12/24〞;
轮毂宽度:3-20〞;
工作直径范围:≥1200mm;
功率:≥0.25KW;
轮毂中心孔直径:不超过135mm;
平衡周期≤7秒;
平衡速度≥210rpm;
平衡精度:±1g;
1台
12 设备柜尺寸:约900*600*1000mm,
多格铁皮柜,优质冷轧钢,
铁皮厚≥1.0 mm,
每层承重100kg以上。
形状如图:
参考图例
10台
13 资料柜尺寸:约1800*850*400mm,
中二斗铁皮柜,优质冷轧钢,
铁皮厚≥1.0 mm;
形状如图:
14台
参考图例
14 工具展示
柜
尺寸:1800*1000*500mm;
材质:优质冷轧钢,
铁皮厚≥1.0 mm;
柜门:金属包边,通体玻璃;
功能:工具展示、分类存放;
形状如图:
参考图例
8组
15 双层折叠
桌
1. 台面:应采用 A级三聚氰胺板,PVC胶条封边。
应符合国际环保要求,
且多种颜色可挑选。
2. 结构:桌子支架应采用30*30mm优制方钢管焊接而成,表面磷化处理,
防锈。
3. 支架:支架脚上应配有调节螺丝,可通过调节螺丝使用桌子达到平衡
不晃动。
钢架表面经过打磨、除锈、磷化、静电喷涂、高温固化而成。
4.特性:二层可放置书本等物体;支架应采用折叠设计,方便堆放或搬运;
5.尺寸:120*40*75cm。
参考图例
50个
16 休闲塑料
培训椅
椅面:应采用RTP加强工程塑料;
椅腿架:应采用优质钢管材料;结实耐用。
尺寸:座椅宽40-50cm,座椅深度45-55cm,
座面高度45-50cm;
座椅总高度75-85cm.
参考图例
160把
二、汽车钣金与喷涂实训设备
序号设备名称技术参数数量备注
1 大梁校正仪套
装
技术参数:
1、工作台长度:≥6500mm;
2、工作台宽度:≥2236mm;
3、工作台高度:300—1020mm;
4、液压系统工作压力:≥70Mpa(1000Osi);
5、塔柱牵引最大拉力:≥95KN;
6、塔柱牵引工作范围:≥360度;
7、电源电压:220V-240V;
8、电动泵功率:≥1.5Kw;
1套
99 零配件仓储架尺寸:1200*400*2000
立柱:50*30,C型钢材
横梁:50*30,P型钢材
层板:0.3 mm
层数: 4层层板、3个空间
颜色:蓝色
单层承重不低于100 kg
参考图例
2台
100 铆钉标准型抽芯铆钉;
材质:铝及合金表面镀锌;
标准:直径2-4mm。
10盒
101 铆钉枪手动拉铆型;
最大拉钉尺寸:6.4(mm)。
2把
102 漆刷木柄;优质羊毛油漆刷;5把103 撬杠20寸中型撬杠;优质钢材。
2个
104 砂纸带类型:2000#;
尺寸:230×280(mm)。
20个
105 收集桶中型肥料收集桶;
材质:塑料;
容量:≥60L。
2个
106 角磨机电源电压:220V;
空载速率:≥11000(rpm);
磨/切片直径:100(mm);
输入功率:710(W);
主轴直径:16(mm)。
2把
107 手刨气动尼龙搭扣式吸尘手刨;
尺寸:70*198mm;
2把
108 碳粉指示盒汽车美容专用,优质干磨指示剂。
2个109 航空剪(直头、最大剪切能力:能剪切1.2MM冷轧铁板或0.7MM不锈钢板;20套。