工业机器人离线编程与仿真(基于KUKA) 安装KUKA工业机器人离线仿真软件
- 格式:pdf
- 大小:3.07 MB
- 文档页数:22
机器人离线编程是指在计算机上进行机器人程序编写和仿真,而无需实际连接到实际的机器人设备。
离线编程的操作方法可以简述如下:
确定编程软件:选择适合您机器人品牌和型号的离线编程软件。
常见的机器人品牌如ABB、Fanuc、KUKA等都提供相应的离线编程软件。
创建机器人模型:使用离线编程软件创建机器人的模型。
这包括定义机器人的运动范围、关节限制、工具和工件的位置等。
编写程序:使用软件提供的编程界面编写机器人程序。
这可能包括使用特定的编程语言(如ABB的Rapid、KUKA的KRL)或使用图形化的编程界面(如拖放式的图形化编程)。
仿真和验证:通过软件提供的仿真功能,模拟机器人程序的运行和操作。
您可以在计算机上查看机器人的运动轨迹、执行路径、碰撞检测等,并验证程序的正确性和可行性。
优化和调试:在仿真环境中进行优化和调试,对程序进行修改和改进,以确保其在实际机器人上的运行效果。
导出和上传:将离线编程软件中完成的程序导出为适合实际机器人控制器的格式。
通过网络或存储介质将程序上传到实际机器人设备。
需要注意的是,离线编程可以大大提高机器人编程的效率和安全性。
它允许程序员在没有实际机器人的情况下进行开发和测试,减少了潜在的操作风险和生产线的停机时间。
然而,在将程序上传到实际机器人之前,务必仔细检查和验证程序的正确性,并遵循设备制造商的指导和安全操作规程。
工业机器人的编程与操作方法工业机器人是一种高度自动化的设备,可以完成各种任务,如搬运、装配、焊接等。
为了使机器人能够准确、高效地完成任务,需要进行编程和操作。
本文将介绍工业机器人的编程和操作方法。
一、编程方法1. 离线编程:离线编程是在计算机上进行机器人程序的编写和模拟。
首先,需要使用专业的机器人软件,如ABB RobotStudio、KUKA Sim、Fanuc RJ3等。
然后,通过图形界面或编程语言来编写机器人程序。
离线编程可以在计算机上进行,无需将机器人放置在生产线上,节省了时间和资源。
完成程序编写后,可以通过模拟功能进行程序仿真,以确保程序的可行性和准确性。
2. 在线编程:在线编程是在实际生产环境中对机器人进行编程。
这种编程方法需要专业的编程设备和软件。
首先,需要连接计算机和机器人,并确保通信正常。
然后,使用机器人控制器上的编程语言或机器人操作界面进行编写。
在线编程可以实时修改和调试程序,但需要在现场进行,可能会受到实际环境的限制。
二、操作方法1. 手动操作:手动操作是指通过外部操作设备,如手柄或按钮,来操控机器人完成任务。
手动操作通常用于机器人的调试和测试阶段,可以在不编写复杂程序的情况下对机器人进行控制。
但手动操作的精度较低,只适用于简单、粗略的操作。
2. 自动操作:自动操作是指通过事先编写好的程序,使机器人按照预定的路径和动作来完成任务。
自动操作需要在编程阶段对机器人的动作进行规划和设定,确保机器人可以准确无误地完成任务。
自动操作可以提高生产效率和产品质量,减少人为错误。
三、编程语言1. 基于图形界面的编程语言:图形界面编程语言是一种以图形元件为基础的编程语言,如ABB RobotStudio的RobotWare、KUKA Sim的KRL等。
这些编程语言通过拖拽和连接图形元素来编写机器人程序,使编程变得更加直观和易于理解。
它们适用于初学者和非专业人员,但在处理复杂的逻辑和算法时可能有限。
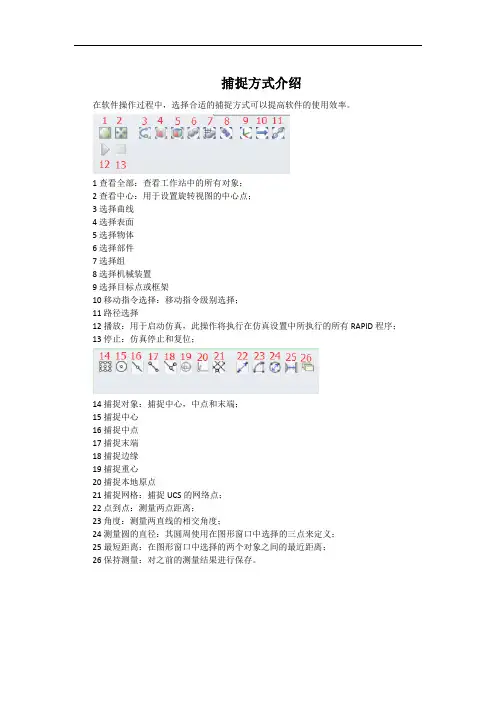
捕捉方式介绍
在软件操作过程中,选择合适的捕捉方式可以提高软件的使用效率。
1查看全部:查看工作站中的所有对象;
2查看中心:用于设置旋转视图的中心点;
3选择曲线
4选择表面
5选择物体
6选择部件
7选择组
8选择机械装置
9选择目标点或框架
10移动指令选择:移动指令级别选择;
11路径选择
12播放:用于启动仿真,此操作将执行在仿真设置中所执行的所有RAPID程序;13停止:仿真停止和复位;
14捕捉对象:捕捉中心,中点和末端;
15捕捉中心
16捕捉中点
17捕捉末端
18捕捉边缘
19捕捉重心
20捕捉本地原点
21捕捉网格:捕捉UCS的网络点;
22点到点:测量两点距离;
23角度:测量两直线的相交角度;
24测量圆的直径:其圆周使用在图形窗口中选择的三点来定义;
25最短距离:在图形窗口中选择的两个对象之间的最近距离;
26保持测量:对之前的测量结果进行保存。
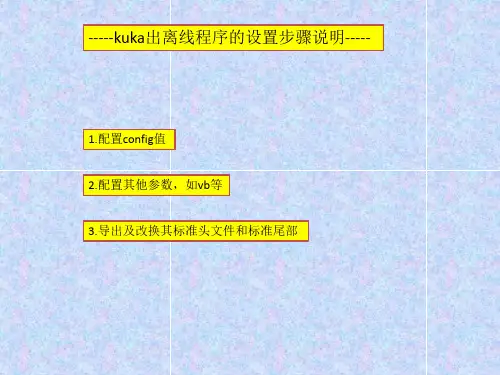
工业机器人离线编程与仿真课程内容
1.工业机器人基础知识介绍:介绍工业机器人的基本概念、分类、结构和工作原理等知识,让学员对工业机器人有一个全面的认识。
2. 工业机器人编程语言:介绍工业机器人编程语言,包括标准语言、高级语言和应用语言等,让学员掌握不同编程语言的特点和使用方法。
3. 工业机器人离线编程工具:介绍工业机器人离线编程工具的使用方法和功能,包括CAD软件、仿真软件和离线编程软件等,让学员能够灵活地使用这些工具进行工业机器人的离线编程和仿真。
4. 工业机器人运动控制:介绍工业机器人运动控制的原理和方法,包括轴运动控制、关节运动控制和机器人整体运动控制等,让学员掌握工业机器人的运动规划和控制技术。
5. 工业机器人应用案例:介绍工业机器人在不同领域的应用案例,包括汽车制造、电子制造、食品加工和物流等领域,让学员了解工业机器人的实际应用情况和市场需求。
通过以上内容的学习和实践,学员可以熟练掌握工业机器人的离线编程和仿真技术,为工业机器人应用的实际操作提供有力支持。
同时,这些知识和技能也将为学员的职业发展带来更多的机会和挑战。
- 1 -。

工业机器人离线轨迹编程在当今的制造业中,工业机器人的应用越来越广泛。
它们能够高效、精准地完成各种复杂的任务,极大地提高了生产效率和产品质量。
而工业机器人离线轨迹编程,作为一种先进的编程方式,正逐渐成为工业机器人应用中的重要技术。
工业机器人离线轨迹编程,简单来说,就是在不依赖实际机器人运行的情况下,通过计算机软件对机器人的运动轨迹进行规划和编程。
这种编程方式与传统的在线示教编程相比,具有诸多优势。
首先,离线轨迹编程能够大大提高编程效率。
在传统的在线示教编程中,编程人员需要在生产现场,通过手动操作机器人来示教每一个动作和路径,这不仅费时费力,而且对于复杂的轨迹,很难达到理想的精度。
而离线轨迹编程则可以在计算机上通过图形化的界面,直观地规划机器人的运动轨迹,还能进行多次的模拟和优化,从而快速得到理想的编程方案。
其次,离线轨迹编程能够提高编程的精度和一致性。
由于是在计算机上进行精确的计算和规划,所以可以避免人为操作带来的误差。
而且,对于相同的任务,通过离线编程可以确保每次机器人的运动轨迹都完全一致,从而保证产品质量的稳定性。
再者,离线轨迹编程可以在机器人投入使用前,对整个生产过程进行模拟和验证。
通过模拟,可以提前发现可能存在的碰撞、干涉等问题,并及时进行调整和优化,避免在实际生产中出现故障和损失。
那么,工业机器人离线轨迹编程是如何实现的呢?通常,它需要以下几个主要步骤。
第一步是建立机器人的模型和工作环境。
这包括机器人本体的几何结构、关节运动范围、工作空间等参数的设定,以及对周边设备、工装夹具等工作环境的建模。
第二步是规划机器人的运动轨迹。
这可以通过在计算机软件中手动绘制轨迹,或者根据工艺要求输入相关的参数,由软件自动生成轨迹。
第三步是对轨迹进行优化。
这包括调整轨迹的速度、加速度、姿态等参数,以确保机器人的运动平稳、高效,同时满足工艺要求。
第四步是进行碰撞检测和干涉检查。
通过模拟机器人在工作环境中的运动,检查机器人与周边设备、工件等是否会发生碰撞和干涉,如果有,则需要对轨迹进行进一步的调整。
工业机器人离线编程仿真技术知到章节测试答案智慧树2023年最新山东交通学院第一章测试1.离线编程仿真软件的机器人系统三维几何构造方法主要有哪几个()参考答案:结构立体几何;扫描变换表示;边界表示2.机器人编程语言没有公认国际标准()参考答案:对3.通用型的工业机器人离线编程仿真软件有哪些()参考答案:RobotArt;DELMIA4.工业机器人的离线编程不可实现复杂运动轨迹编程与仿真。
()参考答案:错5.专用型的工业机器人离线编程仿真软件有哪些()参考答案:RobotStudio;RoboGuide;KUKASim6.国产的工业机器人离线编程软件是哪个()参考答案:RobotArt7.工业机器人的示教编程不能实现高速运动编程。
()参考答案:对8.工业机器人是一种能自动控制、可重复编程、多功能、多自由度的操作机,并且能够搬运材料、工件或者操持工具来完成各种作业。
()参考答案:对9.工业机器人系统的主要坐标系有哪几个()参考答案:世界坐标系;工具坐标系;基坐标系;工件坐标系10.判断一下这个说法:示教器示教编程是操作者利用示教器操作机器人运动并示教编程。
()参考答案:对第二章测试1.下面选项中,ABB工业机器人主要包括()参考答案:机器人本体;控制柜;示教器2.下面的软件中,ABB工业机器人的离线编程仿真软件是()参考答案:RobotStudio3.思考一下,最常见的ABB工业机器人大多是()轴机器人本体。
参考答案:六4.遇到紧急情况时,可以按下工业机器人示教器的急停键或控制柜的急停按键。
()参考答案:对5.ABB工业机器人控制柜的钥匙开关可以切换运动状态有()参考答案:自动运行;手动运行6.ABB工业机器人本体上提供的接口有()参考答案:电力和信号接口;气路接口;控制接口;以太网接口7.按照ABB RobotStudio软件时可以使用Windows的中文登录用户名。
()参考答案:错8.ABB工业机器人的轴关节用()驱动。