工业机器人程序管理
- 格式:pptx
- 大小:1.35 MB
- 文档页数:36

工业机器人规章制度第一章总则第一条为规范工业机器人的使用和管理,保障生产安全,提高生产效率,制定本规章制度。
第二条工业机器人是指具有自主控制和执行生产任务能力的机械设备,包括但不限于焊接机器人、搬运机器人、喷涂机器人等。
第三条工业机器人的管理遵循“安全第一、预防为主、综合治理、全员参与”的原则。
第四条本规章制度适用于本企业所有使用工业机器人的部门、岗位和人员。
第五条使用工业机器人的部门和岗位应当设立专门负责管理工业机器人的管理人员,并指定专业技术人员负责维护和保养工业机器人。
第六条使用工业机器人的人员应当接受必要的培训,掌握工业机器人的操作规程和安全知识,严禁未经培训和资格认证的人员操作工业机器人。
第七条任何单位和个人不得擅自更改工业机器人的参数和程序,必须经过授权的专业技术人员才能进行调整。
第二章工业机器人的安全管理第八条工业机器人的安全管理包括机器人的日常巡检、定期检修和事故应急处理。
第九条工业机器人的操作人员在使用前应当对机器人进行细致的巡检,检查电气设备、连接线路、传动装置等部件的安全性。
第十条工业机器人应设有可靠的急停开关,并设置在易于操作的位置,操作人员应定期检查急停开关的功能是否正常。
第十一条工业机器人在发生异常时,应立即停止运行,并及时通知维护人员处理,严禁使用故障机器人。
第十二条工业机器人每天应进行定期检修,清洁机身内外,检查各部件的磨损情况,确保机器人的正常运行。
第十三条工业机器人的维护和保养应当由具有专业技术资格的人员进行,定期检查机器人的传动系统、润滑系统、电气系统等部件。
第十四条工业机器人在运行过程中应当严格遵守操作规程,操作人员应遵守安全操作流程,保障自身安全。
第十五条工业机器人的作业区域应设置明显的安全警示标识,并设立安全隔离带,禁止未经许可人员入内。
第十六条工业机器人应配备必要的安全保护装置,确保作业人员远离机器人工作区域,避免发生意外伤害。
第三章工业机器人的应急处置第十七条在使用工业机器人过程中如发生异常情况,应立即停止机器人运行,并及时采取应急措施。
工业机器人安全操作规程工业机器人是现代工业生产中不可或缺的重要设备,能够有效提高生产效率,降低劳动强度。
然而,由于机器人操作不慎可能会导致意外事故的发生,因此制定和遵守安全操作规程显得尤为重要。
本文将介绍工业机器人的安全操作规程,以保障工人的身体健康与生命安全。
一、机器人的合理布置和设置在进行机器人的安装和配置时,应考虑以下因素,以确保操作安全:1. 机器人的工作范围应与其他设备和工作区域保持适当的距离,以避免碰撞和意外伤害。
2. 机器人的动作和速度应进行合理设置,以确保操作的平稳和稳定性。
3. 需要安装防护设施,如护栏、安全光幕等,以防止人员误入作业区域。
二、人员培训和操作规程1. 所有操作机器人的人员必须接受专业培训,了解机器人的基本原理和操作方法,以及常见的故障处理办法。
2. 操作人员应严格按照操作规程进行操作,不得擅自修改或调整机器人的程序和参数。
3. 在操作过程中,要随时关注机器人的状态,如异常声音、异味等,及时报告并采取措施。
三、安全防护设备的维护与保养1. 安全防护设备(如护栏、保护装置等)的维护和保养工作要定期进行,确保其正常工作状态,如发现故障要及时修复或更换。
2. 定期检查机器人的各项安全装置是否完好,并进行测试,以确保其可靠性和准确性。
四、禁止操作行为1. 禁止在机器人工作时进行维修和保养工作,必须在停机状态下进行。
2. 禁止在机器人的工作范围内临时存放物品,以免影响机器人的正常运行。
3. 禁止穿戴松散的衣物和首饰,以免被吸入机器人工作范围。
4. 禁止站在机器人的工作范围内,以免被夹伤或碰撞。
五、事故处理与应急预案1. 如果发生机器人故障或操作失误导致意外事故,要立即停机,切勿擅自进行操作和清除故障。
2. 事故处理人员要及时到场,采取必要措施确保事故现场安全,并进行紧急救援。
3. 各部门要建立健全的应急预案,明确责任和处置流程,以应对各种突发情况。
六、定期安全检查和评估1. 定期进行机器人的安全检查与评估,确保其符合相关安全标准和规范要求。
工业机器人编程流程和注意事项下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!工业机器人编程是指使机器人完成预期任务的过程,它涉及到机器人的运动规划、路径规划、轨迹规划、控制算法等多个方面。

工业机器人操作规程
《工业机器人操作规程》
一、背景
工业机器人是现代工业生产中常见的一种设备,它能够自动完成各种复杂的操作,提高生产效率,降低成本。
但是,工业机器人的操作也存在一定的风险,需要严格遵守操作规程,保障操作人员的安全。
二、操作规程
1. 操作人员必须接受专业培训,获得相关证书方可操作工业机器人。
2. 在操作前,必须对机器人进行全面的检查,确保各部件和传感器运行正常。
3. 操作人员必须佩戴符合规定的防护装备,包括手套、护目镜、耳塞等。
4. 在机器人运行期间,禁止随意接近机器人作业区域。
5. 操作人员操作时,必须严格按照机器人操作手册中的程序和规定进行操作,并且严禁擅自修改程序。
6. 定期对机器人进行维护和保养,确保其运行正常。
7. 在机器人运行期间,严禁穿插其他人员或其他设备进入作业区域,以免发生意外。
三、安全措施
1. 在机器人操作区域设置明显的警示标识,提醒他人禁止靠近。
2. 对机器人进行固定安装,确保其稳定运行。
3. 对机器人的安全防护门必须严格执行,禁止随意打开。
4. 设置安全急停按钮,一旦发生危险情况,立即按下急停按钮停止机器人运行。
四、紧急救援
一旦发生意外,立即向相关部门报告,及时进行紧急救援和事故处理,确保受伤人员得到及时的救助。
五、总结
工业机器人的操作规程对于保障操作人员的安全和设备的正常运行具有重要意义。
只有严格遵守操作规程,才能最大限度地确保操作人员的安全和设备的正常运行。
工业机器人安全操作规程1范围本标准规定了工业机器人及其系统在设计、制造、编程、操作、使用、修理和维护阶段的安全要求及注意事项。
本操作规程适用于青岛港湾职业技术学院模具、数控、机械制造及其自动化等相关专业进行数控机床实训操作的教师及学生。
2规范性引用文件青岛港《职工通用安全守则》、《设备安全管理办法》、《工业机器人使用说明书》、《实验实训室管理制度》。
3术语与定义3.1限位装置用停止机器人全部运动来限定其工作范围的装置。
3.2限定工作范围指由限位装置所限定的机器人工作空间。
3.3危险区域人或障碍物进入其中会发生危险的机器人周围区域。
其确定方法见附录A(补充件)。
3.4报警装置一种发光或发声装置,用于警告潜在人身或其他不安全因素。
3.5现场安全传感装置一种用来探测人或物体对现场侵优的安全装置(例如光帘、压敏地板垫、接近式探测器以及视觉安全系统等)。
3.6安全防护设备具有安全防护功能的设备或装置(例如安全防护栏杆、紧急停机装置、防止越程装置、报警装置等)。
3.7安全防护措施为实现安全防护所采取的手段、方法。
4内容与要求4.1入实训区域实习必须按要求穿工作服,要戴安全帽。
4.2所有实训步骤须在实训教师指导下进行,未经指导教师同意,不许开机器人。
4.3严禁在机器人开动期间离开工作岗位做与操作无关的事。
4.4严禁在实训区域嬉戏、打闹,机器人开动时,严禁在工作区域穿梭。
4.5机器人的开机、关机顺序一定要严格按照机床说明书规定操作。
4.6在机器人的工作区,要设置阻止人进入危险区域的安全防护栏杆,且当人误入危险区域时,机器应具有报警、停机功能。
因示教、检修、故障处理等不得不进入危险区域时,应采取相应的安全防护。
4.7在操作机器人应具有安全动作速度的功能,机器人速度严格按照老师的要求。
4.8每台机器人都应具有紧急停机功能。
一旦发出紧急停机指令,机器人的运动应立即停止。
4.9紧急停机后,不应自动复位;恢复机器人工作,应按规定程序重新启动。
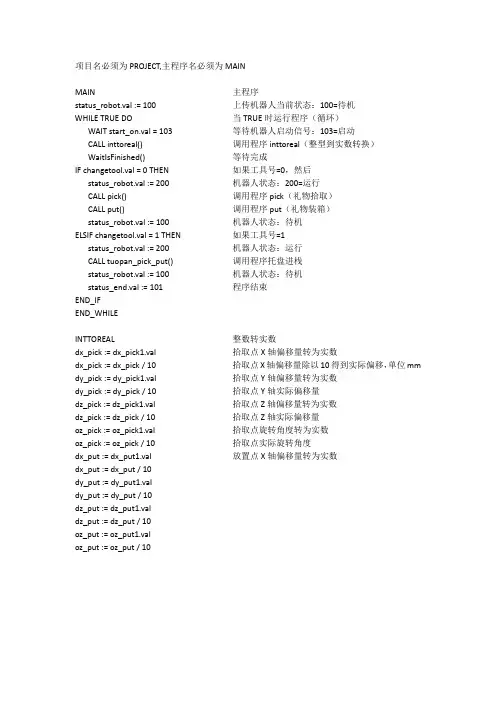
项目名必须为PROJECT,主程序名必须为MAINMAIN 主程序status_robot.val := 100 上传机器人当前状态:100=待机WHILE TRUE DO 当TRUE时运行程序(循环)WAIT start_on.val = 103 等待机器人启动信号:103=启动 CALL inttoreal() 调用程序inttoreal(整型到实数转换)WaitIsFinished() 等待完成IF changetool.val = 0 THEN 如果工具号=0,然后status_robot.val := 200 机器人状态:200=运行CALL pick() 调用程序pick(礼物拾取)CALL put() 调用程序put(礼物装箱)status_robot.val := 100 机器人状态:待机ELSIF changetool.val = 1 THEN 如果工具号=1status_robot.val := 200 机器人状态:运行CALL tuopan_pick_put() 调用程序托盘进栈status_robot.val := 100 机器人状态:待机status_end.val := 101 程序结束END_IFEND_WHILEINTTOREAL 整数转实数dx_pick := dx_pick1.val 拾取点X轴偏移量转为实数dx_pick := dx_pick / 10 拾取点X轴偏移量除以10得到实际偏移,单位mm dy_pick := dy_pick1.val 拾取点Y轴偏移量转为实数dy_pick := dy_pick / 10 拾取点Y轴实际偏移量dz_pick := dz_pick1.val 拾取点Z轴偏移量转为实数dz_pick := dz_pick / 10 拾取点Z轴实际偏移量oz_pick := oz_pick1.val 拾取点旋转角度转为实数oz_pick := oz_pick / 10 拾取点实际旋转角度dx_put := dx_put1.val 放置点X轴偏移量转为实数dx_put := dx_put / 10dy_put := dy_put1.valdy_put := dy_put / 10dz_put := dz_put1.valdz_put := dz_put / 10oz_put := oz_put1.valoz_put := oz_put / 10PTP(xipan_tool_pos) 切换到礼物拾取工具位置Tool(xipan_tool) 切换到礼物拾取工具坐标系 WaitIsFinished() 等待完成//Lin(inipoint) 拾取坐标偏移基准点(不参与实际动作) Pickpot := inipoint 拾取点赋值Pickpot.x := inipoint.x ‐dx_pick 拾取点X轴偏移计算Pickpot.y := inipoint.y ‐dy_pick ‐laser_offset 拾取点Y轴偏移计算 Pickpot.z := inipoint.z + dz_pick + 100 拾取点Z轴偏移计算(增加100mm作为WaitIsFinished() 等待完成Lin(pickpot) 以直线方式运行到拾取准备点 WaitIsFinished() 等待完成pickpot.z := pickpot.z ‐100 减少100mm到拾取点 WaitIsFinished() 等待完成Lin(pickpot, lin300) 以300cm/min的速度运行到拾取点 WaitIsFinished() 等待完成dout24.Set(TRUE) 真空打开dout26.Set(TRUE) 吸盘1打开WaitTime(2000) 延时2秒WaitIsFinished() 等待完成IF xiqu_status.val = TRUE THEN 如果真空检测为TRUEpickpot.z := pickpot.z + 100 上升100mm作为退出点WaitIsFinished() 等待完成Lin(pickpot) 运动到退出位置ELSIF xiqu_status.val = FALSE THEN 如果真空检测为FALSEstatus_robot.val := 300 机器人状态:300=吸取错误PAUSE 暂停END_IFTool(xipan_tool) 切换到礼物拾取工具坐标系//Lin(put_inipoint) 放置坐标偏移基准点(不参与实际动作) putpot := put_inipoint 放置点赋值putpot.x := put_inipoint.x + dx_put 放置点X轴坐标计算putpot.y := put_inipoint.y + dy_put ‐laser_offset 放置点Y轴坐标计算putpot.z := put_inipoint.z + dz_put + 150 放置点Z轴坐标计算(增加150mm作为WaitIsFinished() 等待完成Lin(putpot) 运动到放置准备点WaitIsFinished() 等待完成IF xiqu_status.val = TRUE THEN 如果真空检测为TRUEputpot.z := put_ready.z ‐100 高度下降100mm作为姿态调整点putpot.a := putpot.a + oz_pick 旋转角度计算 WaitIsFinished() 等待完成Lin(putpot) 运动到姿态调整点 WaitIsFinished() 等待完成putpot.z := putpot.z ‐50 高度减少50mm(实际放置点) WaitIsFinished()Lin(putpot) 运动到放置位置 WaitIsFinished()dout24.Set(FALSE) 真空关闭dout26.Set(FALSE) 吸盘1关闭WaitIsFinished()Putpot.z := putpot.z + 200 高度上升200mm作为退出点 WaitIsFinished()Lin(putpot) 运动到退出点 WaitIsFinished()ELSIF xiqu_status.val = FALSE THEN 如果真空检测为FALSEstatus_robot.val := 400 机器人状态:400=放置错误PAUSEtuopan_pick_put 托盘进栈PTP(tupan_tool) 切换到托盘拾取工具位置Tool(tuopan_tool) 切换到托盘拾取工具坐标系Lin(pick_ready) 运行到拾取准备位置Lin(pick_up) 运行到拾取位置 WaitIsFinished()dout24.Set(TRUE) 真空打开dout25.Set(TRUE) 吸盘2打开WaitTime(2000)WaitIsFinished()IF xiqu_status.val = TRUE THEN *如果真空检测为TRUELin(pick_after) 运动到退出位置 Lin(put_up) 运动到放置准备位置IF xiqu_status.val = TRUE THEN 如果真空检测为TRUELin(put_down) 运动到放置准备位置WaitIsFinished()dout24.Set(FALSE) 真空关闭dout25.Set(FALSE) 吸盘2关闭PTP(tupan_tool) 回到开始点ELSIF xiqu_status.val = FALSE THEN 如果真空检测为FALSEdout24.Set(FALSE) 真空关闭dout25.Set(FALSE) 吸盘2关闭WaitIsFinished()status_robot.val := 400 机器人状态:放置错误PAUSEEND_IFELSIF xiqu_status.val = FALSE THEN *如果真空检测为FALSE status_robot.val := 300 机器人状态:吸取错误 PAUSEEND_IF。
工业机器人操作安全操作程序工业机器人在现代制造业中发挥着越来越重要的作用,它们能够提高生产效率、保证产品质量,并减轻工人的劳动强度。
然而,在享受工业机器人带来便利的同时,我们也不能忽视操作过程中的安全问题。
为了确保操作人员的人身安全以及设备的正常运行,制定一套完善的安全操作程序至关重要。
一、操作前的准备工作1、操作人员培训操作人员必须经过专业的培训,熟悉工业机器人的基本结构、工作原理、操作方法以及安全注意事项。
只有通过考核并取得相应资格证书的人员,才能进行工业机器人的操作。
2、工作环境检查在操作工业机器人之前,需要对工作环境进行仔细检查。
确保工作区域整洁、无杂物,通道畅通无阻。
检查周围的设备、工具和材料是否摆放整齐,避免影响机器人的运动轨迹。
同时,要确保工作环境的照明良好,以便操作人员能够清晰地观察机器人的运行情况。
3、机器人状态检查在启动机器人之前,操作人员需要对机器人的本体、控制器、示教器等进行全面检查。
查看机器人的外观是否有损坏、连接件是否松动、电缆是否完好无损。
检查机器人的各轴运动是否正常,有无异常声响和卡顿现象。
确保机器人的各项功能指标都在正常范围内。
4、安全防护装置检查工业机器人通常配备有各种安全防护装置,如安全门、光幕、急停按钮等。
操作人员需要检查这些安全防护装置是否完好有效,是否能够正常工作。
如果发现安全防护装置存在故障或损坏,必须及时进行维修或更换,严禁在安全防护装置失效的情况下操作机器人。
二、操作中的安全注意事项1、遵循操作规程操作人员在操作工业机器人时,必须严格遵循操作规程,按照规定的步骤和顺序进行操作。
不得随意更改操作流程或参数,以免引发安全事故。
2、保持安全距离在机器人运行过程中,操作人员应与机器人保持足够的安全距离,严禁靠近机器人的运动范围。
如果需要对机器人进行近距离观察或操作,必须先按下急停按钮,确保机器人停止运动后再进行。
3、禁止无关人员进入工作区域在机器人工作时,应在工作区域周围设置明显的警示标识,禁止无关人员进入。
工业机器人的工作流程英文回答:Industrial robots are automated machines that perform a variety of tasks in a variety of industries. They are typically programmed to perform specific tasks repeatedly, with a high degree of accuracy and precision.The workflow of an industrial robot typically involves the following steps:1. Programming: The robot is programmed to perform a specific task. This involves creating a program that specifies the robot's movements, speed, and other parameters.2. Setup: The robot is set up in the desired location and the program is loaded into the robot's controller.3. Calibration: The robot is calibrated to ensure thatit is moving and operating correctly.4. Operation: The robot is operated according to the program. The robot will typically perform the same task repeatedly, until it is stopped or reprogrammed.5. Maintenance: The robot is regularly maintained to ensure that it is operating correctly and safely.Industrial robots are used in a wide variety of applications, including:Assembly.Welding.Painting.Material handling.Inspection.Packaging.中文回答:工业机器人的工作流程。
工业机器人的使用方法工业机器人在现代工业生产中扮演着越来越重要的角色。
它们被广泛应用于制造业的各个领域,如汽车制造、电子制造、食品加工和物流等。
工业机器人能够提高生产效率、减少人力成本,并且具有高度准确性和可编程性。
本文将介绍工业机器人的使用方法,并讨论一些使用机器人时应注意的事项。
一、工业机器人的基本操作1. 设置机器人程序:首先,操作人员需要通过机器人控制面板或计算机软件来设置机器人的程序。
程序包括机器人的运动轨迹、动作序列和操作指令等。
2. 定义工件坐标系:在进行操作之前,需要定义工件坐标系,即确定机器人的参考点和工作范围。
通过准确设置工件坐标系,可以确保机器人在操作中的准确性。
3. 进行教示运动:教示运动是机器人操作的重要步骤之一。
操作人员需要手动引导机器人进行所需动作,同时机器人会记录并学习这些运动。
这样一来,机器人就能够在后续操作中重复这些动作。
4. 编写和编辑程序:在教示运动之后,操作人员可以通过编写和编辑机器人程序来细化和优化其运动。
这包括设置机器人的运动速度、力度以及其他操作参数。
二、工业机器人的应用领域和技术要求1. 汽车制造:工业机器人在汽车制造工业中扮演着至关重要的角色。
它们可以完成自动焊接、喷涂、装配和零件处理等任务。
机器人能够提高生产效率,并且在重复性高、安全性要求高的环境中发挥重要作用。
2. 电子制造:在电子工业中,工业机器人用于电子零件的组装、印刷电路板的焊接和检测等工作。
机器人的高精度和稳定性确保了电子产品的质量和可靠性。
3. 食品加工:工业机器人在食品加工行业的应用越来越广泛。
它们可以用于食品包装、灌装、分拣和检测等工作。
机器人能够确保食品的卫生安全,并提高生产效率。
4. 物流:工业机器人在物流行业中的应用也越来越多。
它们可以用于仓库管理、装卸货物、搬运和分拣等工作。
机器人的高速度和准确性能够提高物流效率,并减少人工错误。
尽管工业机器人的应用领域广泛,但在使用过程中需要注意以下事项:1. 安全性:工业机器人在操作过程中可能涉及到高温、高压、尖锐物体等危险因素。
一、总则为了规范车间机器人的使用和管理,提高生产效率和安全性,保障车间的正常生产秩序,特制订本制度。
二、适用范围本制度适用于车间内所有机器人的管理和使用。
三、车间机器人管理责任1. 车间主管负责车间机器人的管理和安全工作;2. 车间主管下设专门的机器人管理人员,负责机器人的日常维护和使用;3. 所有车间员工都必须遵守机器人管理制度,严格按照规定操作和使用机器人。
四、机器人的使用1. 只有经过培训和考核的员工方可使用机器人;2. 禁止未经许可私自改动机器人的程序和参数;3. 每次使用机器人前必须进行安全检查,并保证机器人的设备完好,无故障;4. 使用完毕后必须及时关闭机器人的电源和断开相关连接线;5. 禁止将机器人用于超出其承受能力和规定范围的工作。
五、机器人的维护1. 机器人管理人员负责对机器人进行日常维护和巡查,发现故障及时维修;2. 定期对机器人进行系统维护和保养,确保其正常运转和安全使用;3. 禁止未经许可的人员进行对机器人的维修和维护。
六、机器人的安全1. 机器人使用过程中,必须遵守安全操作规范,严禁戴手套、长发等可能导致事故的行为;2. 机器人必须安装相应的安全保护装置,保障员工的安全;3. 机器人使用过程中,必须戴好安全帽和工装,确保操作人员的安全;4. 机器人使用过程中,严禁在未关闭机器人电源的情况下进行维护和保养。
1. 对每台机器人的使用情况必须进行详细的记录,包括使用时间、维护情况、故障情况等;2. 每次使用机器人的人员都必须对其进行操作记录,包括使用人员、操作时间、使用情况等;3. 对发生的机器人意外情况必须及时进行记录和报告。
八、违规处理1. 对违反机器人管理制度的人员,依据严重性和后果进行适当的处罚;2. 对故意破坏和损坏机器人设备的人员,依据严重性和后果进行相应的法律责任追究;3. 对因违规使用机器人造成事故的人员,依据严重性和后果进行相应的法律责任追究。
九、附则本制度自颁布之日起正式执行,对车间机器人的管理制度做出相应的调整。