储煤槽卸料车自动控制方案的设计与应用
- 格式:doc
- 大小:314.00 KB
- 文档页数:5
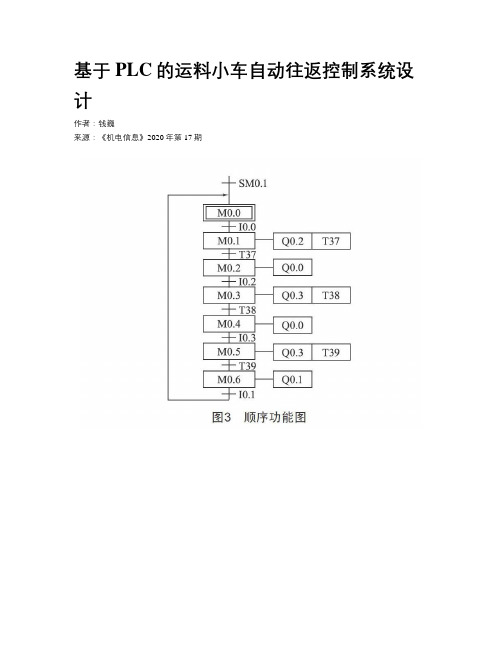
基于PLC的运料小车自动往返控制系统设计作者:钱巍来源:《机电信息》2020年第17期摘要:运料小车作为工控企业生产线上物料输运的主要设备,其能否正常运行,对工业生产的影响很大。
传统运料小车运行时需要人员现场操控,但随着工业自动化水平的提高,将PLC应用于运料小车控制系统,可实现对小车的自动控制,降低运营费用。
现基于西门子PLC,设计了一种运料小车自动往返控制系统,并通过亚龙实训模块对程序设计进行了验证,该设计可应用于实际生产,提高了系统可靠性和工作效率。
关键词:PLC;运料小车;控制系统0 引言运料小车作为工业生产线上物料输运的主要设备,在煤矿、有色金属、冶金、码头、港口等领域得到了广泛应用[1]。
传统的工业运料小车在工作时需要人员现场监控操作,由于小车的运行环境比较恶劣,所以运营成本较高[2]。
随着工业自动化程度的提高,PLC作为一种为工业环境下应用而设计的控制器,由于编程语言简单、易于维护且工作可靠性高,被广泛应用于各种工业控制系统中[3-4]。
将PLC应用于运料小车的控制系统中,以控制运料小车的位置到达情况、自动装料和卸料,可实现整个运料过程的自动化控制,减少人员操作,降低运营成本,提高生产效率。
本文采用西门子S7-200 CPU 226CN型PLC,设计了一种运料小车自动往返控制系统,可以满足小车控制要求。
1 控制要求运料小车自动往返控制系统原理如图1所示,具体控制要求如下:按下启动按钮,运料小车在A地(SQ1位置)停留5 s进行装料,由A地运料到B地(SQ2位置)后,在B地停留3 s进行料斗卸料,然后从B地运料到C地(SQ3位置)后停留2 s进行料斗卸料,之后空车返回A地,回到系统初始状态。
2 PLC的I/O地址分配及外部接线根据小车控制要求,采用西门子S7-200 CPU 226CN型PLC,完成对输入、输出点的控制。
通过分析控制过程,确定输入元件有启动按钮SB1、行程开关SQ1、SQ2、SQ3以及停止按钮SB2,输出元件有前进、后退、装料、卸料。

机电一体化课程设计2012级小车自动往返装卸料控制学生姓名学号系别专业班级指导教师完成日期目录1. 引言近年来;随着大规模集成电路的发展;可编程控制器得到了迅速的发展..PLC 是以微机技术为核心的通用工业控制装置;它将传统的继电器-接触器控制技术与计算机和通信技术融为一体;在工业自动化、机电一体化以及传统的工业控制方面;得到了广泛的应用;发挥着越来越大的作用..它采用一类可编程控制器的存储器;用于其内部存储程序;执行逻辑运算;顺序控制;定时;计数及算术操作等面向用户的指令;并通过数字或模拟式输入/输出信号;控制各种类型的机械或是生产过程..可编程控制器及其有关外部设备;都按易于与工业控制系统联成一个整体、易于扩充其功能的原则设计..目前;PLC的主要品牌有西门子、三菱、欧姆龙、韩国LG、美国AB、ABB、松下、富士、施耐德等..而且PLC控制是自动控制中最常见控制方式之一;小车自动往返与定位控制就是控制应用的一个典型例子;由于可编程控制器具有很好的处理小车自动往返与定位控制以及良好的稳定性;而且可以很简单的改变控制的方式;因此运用PLC来设计小车自动往返与定位运动越来越普遍..通过本设计;让我们掌握小车往返运行装卸料的控制原理..并且能够综合应用与与PLC控制技术应用在实际工程中为今后的工作打下基础..了解设计过程;实际动手操作;对于以后遇到类似的问题也知道如何取解决..2. 设计任务2.1 设计内容设计小车自动往返装卸料控制;由PLC控制;组态软件作为人机控制;实现系统运行监控..编写PLC梯形图和设计组态软件用户程序;最终调试达到控制要求.. 2.2 控制要求如图2-1所示;设计小车自动往返装卸料控制;具体控制要求如下:一辆小车在A;B两点之间运行;在A;B两点各设一个限位开关;如图所示;小车在A点时后限位开关受压动作;操作控制按钮可使小车向前行至料斗下碰到前限位开关;停止;装料后再返回A地将料卸下..小车要求有4种控制方式..a)手动控制方式;b)单步运行控制方式;c)单周期运行控制方式;d)自动循环运行控制方式..详细控制要求如下:1手动控制方式在手动控制方式下;可用4个控制按钮控制小车的向前、向后运行;以及车门的打开和料斗门的打开..小车的运行由三相异步电动机控制;小车的车门和料斗的车门由电磁铁控制;当电磁铁得电时;料斗门或斗门打开;失电时关闭..①小车向前运行:小车在料斗下面时不能向前运行;小车的车门在打开时不能运行;小车采用点动控制;按下向前运行按钮;小车向前进;当小车行至料斗下时;碰到前限位开关时应停下来..②小车向后运行:小车在A地点时不能后退;小车的车门在打开时不能运行;小车采用点动控制;料斗门未关闭时不能运行;按下向后运行按钮时;小车向后运行至A地点时;小车碰到后限位开关应停下来..③料斗门打开控制:小车必须在B点料斗门下时;才能打开料斗门;以避免将料卸在地上..按一下料斗门打开按钮;控制料斗门的电磁铁得电;斗门打开;延时10秒种后电磁铁失电;斗门关闭..④车门打开控制:小车必须在A地点时;才能打开车门;以保证将料卸在规定地点..按一下车门打开按钮;控制车门的电磁铁得电;车门打开;延时10秒种后电磁铁失电;车门关闭..2单步运行方式小车在A地;并且在车门关好的情况下;按下小车前进按钮;小车自动向前运行;从A地运行到B地停;再按下料斗门打开按钮;料斗门打开装料10秒;再按下小车后退按钮;小车自动向后运行到A处停止;再按下车门打开按钮;车门打开;卸料10秒后车门关闭..3单周期运行控制要求小车在A地点;并且在车门关好的情况下;按一下向前运行按钮..小车就从A 地点运行到B地点停下来;然后料斗门打开装料10秒钟;之后小车自动向后行到A 地点停止;车门打开卸料10秒钟后;车门关闭..4自动循环控制方式要求小车在A地点时;按一下向前运行按钮;小车将自动重复单周期运行过程;断开运行开关时;小车将在完成一个循环之后;结束运行..在手动控制方式下不能运行;单周期;双周期和自动运行方式;反之;在单周期;双周期和自动运行方式下也不能进行手动控制..图2-1 小车自动往返装卸料控制图3.总体方案的确定PLC控制是自动控制中最常见控制方式之一;由于可编程控制器具有很好的处理小车自动往返与装卸料控制以及良好的稳定性;而且可以很简单的改变控制的方式;因此运用PLC来设计小车自动往返与装卸料运动越来越普遍..3.1 小车自动往返装卸料控制系统的构成小车前进和后退开关来控制..在装料和卸料的地方用限位开关来实现;当小车前进到达B地时;碰到前限位开关;实现小车停车装料动作;并且用定时器计时装料10秒;当小车后退到达A地时;碰到后限位开关;实现小车车门开卸料动作;并且用定时器计时卸料10秒..3.2 工作过程工作过程如图3-1所示:图3-1 小车自动往返装卸料工作过程3.3 方案设计根据控制目的和要求;进过仔细分析各种因素;制定了整体的设计方案:以西门子S7-200为核心;完成对输入输出点的控制..监控系统通过MCGS通信协议与PLC 进行I/O点的通信..1小车自动控制主电路图图3-2小车自动控制示意图2PLC装卸料小车接线示意图图3-3 自动往返小车PLC外部接线图3总体设计方案本设计是基于PLC的小车往返运动装卸料控制系统的设计;我采用的PLC可编程语言是西门子S7-200系列PLC编程语言..首先在设计外部程序时;用西门子S7-200汇编一个主程序调用四个子程序..主程序决定小车的运行方式;手动;单步;单周期还是自动..然后在子程序中详细汇编各种方式的小车往返装卸料..再次在设计的系统中运用继电器M来控制PLC和计算机内部的组态进行读写..这样既能达到PLC控制小车自动往返装卸料界面的监控状态;又能由组态中开关自行控制小车自动往返装卸料界面的监控状态..4.控制系统软件设计4.1小车自动往返装卸料控制流程图图4-1 小车往返顺序功能图根据图3-4 汇编PLC程序能够实现小车自动往返装卸料控制..并且确定输入输出的分配能够更快的编译程序得到实现..4.2 I/O分配表表4-1 I/O分配表4.3 PLC程序设计1主程序中调用运行方式子程序手动子程序调用图4-2 手动子程序调用单步子程序调用图4-2 单步子程序调用单周期子程序调用图4-3 单周期子程序调用自动子程序调用图4-4 自动子程序调用2手动子程序运行图4-5 手动运行3单步子程序运行图4-6 单步运行4单周期子程序运行图4-7单周期运行4自动子程序运行图4-8 自动运行4.4组态软件的界面设置图4-9 组态界面设置如图4-9所示;小车从A地到B地自动往返运行;并且在B点进行装料;在A点进行开车门卸料..输出的Q要通过脚本程序的编写连接小车运行..限位开关的感应也需要在脚本程序中添加..图4-10 运行策略脚本程序如下所示:IF 前进输出=1 THEN后限位开关1=0小车=小车+15endifIF 装料=1 THEN小车=小车endifIF 及时到=1 THEN装料=0endifIF 后退输出=1 THEN前限位开关1=0小车=小车-15endifIF 卸料=1 THEN小车=小车endifIF 及时到1=1 THEN卸料=0endifIF 小车=0 THEN后退输出=0后限位开关1=1endifIF 小车 >= 600 THEN前进输出=0前限位开关1=1Endif脚本程序中编写完成;然后通过定时器开启装卸料时间..图4-11 定时器计时图图4-12 对象选择类型4.5 组态与PLC通信在通用串口设备属性中要选择串口端口号1~255——0-COM1才能通讯成功;并且通讯的时候要关闭西门子S7-200程序编辑..如图4-12所示图4-13 通用串口设备属性图4-14 设备编辑窗口在图4-14设备编辑窗口;添加所需要的设备通道;并且选择可读写的M和Q..在连接变量中选择变量类型并且命名不能相同;否则通讯后读写不出来..图4-15 I输入连接变量图4-16 Q输出连接变量图4-17 M继电器连接变量4.6 程序调试与运行1手动方式前进:小车在料斗下面时不能向前运行;小车的车门在打开时不能运行;小车采用点动控制;按下向前运行按钮;小车向前进;当小车行至料斗下时;碰到前限位开关时应停下来..装料:小车必须在B点料斗门下时;才能打开料斗门;以避免将料卸在地上..按一下料斗门打开按钮;控制料斗门的电磁铁得电;斗门打开;延时10秒种后电磁铁失电;斗门关闭..后退:小车在A地点时不能后退;小车的车门在打开时不能运行;小车采用点动控制;料斗门未关闭时不能运行;按下向后运行按钮时;小车向后运行至A地点时;小车碰到后限位开关应停下来..卸料:小车必须在A地点时;才能打开车门;以保证将料卸在规定地点..按一下车门打开按钮;控制车门的电磁铁得电;车门打开;延时10秒种后电磁铁失电;车门关闭..2单步方式小车在A地;并且在车门关好的情况下;按下小车前进按钮;小车自动向前运行;从A地运行到B地停;再按下料斗门打开按钮;料斗门打开装料10秒;再按下小车后退按钮;小车自动向后运行到A处停止;再按下车门打开按钮;车门打开;卸料10秒后车门关闭..3单周期方式小车在A地点;并且在车门关好的情况下;按一下向前运行按钮..小车就从A 地点运行到B地点停下来;然后料斗门打开装料10秒钟;之后小车自动向后行到A 地点停止;车门打开卸料10秒钟后;车门关闭..4自动方式小车在A地点时;按一下向前运行按钮;小车在A地点;并且在车门关好的情况下;按一下向前运行按钮..小车就从A地点运行到B地点停下来;然后料斗门打开装料10秒钟;之后小车自动向后行到A地点停止;车门打开卸料10秒钟后;车门关闭..;断开运行开关时;小车将在完成一个循环之后;结束运行..5.程序调试心得与建议通过本次设计;让我很好的锻炼了理论联系实际;与具体项目、课题相结合开发、设计产品的能力..既让我们懂得了怎样把理论应用于实际;又让我们懂得了在实践中遇到的问题怎样用理论去解决..在本次设计中;我们还需要大量的以前没有学到过的知识;于是图书馆和INTERNET成了我们很好的助手..在查阅资料的过程中;我们要判断优劣、取舍相关知识;不知不觉中我们查阅资料的能力也得到了很好的锻炼..我们学习的知识是有限的;在以后的工作中我们肯定会遇到许多未知的领域;这方面的能力便会使我们受益非浅..在设计过程中;总是遇到这样或那样的问题..有时发现一个问题的时候;需要做大量的工作;花大量的时间才能解决..自然而然;我的耐心便在其中建立起来了..为以后的工作积累了经验;增强了信心..参考文献[1]廖常初. FX系列PLC编程及应用M.北京:机械工业出版社[2]廖常初. PLC编程及应用S7-200M.北京:机械工业出版社[3]邓星钟.机电传动控制M.武汉:华中科技大学出版社[4]王永华..电器控制及PLC应用技术M.北京:北京航空航天大学出版社[5]电气制图及图形符号、国家标准汇编[6]有关S7-200可编程控制器手册、资料等..。

印度2X300MW燃煤电厂移动式卸料车控制系统设计移动式卸料车属于在轨道上行走的移动设备。
根据卸料口的数量,其行走距离的远近不同。
卸料车往往是将物料运送到料仓的最后环节。
卸料车所处的工作环境恶劣,卸料时粉尘浓度高。
实现卸料车安全、可靠地全自动控制,可以大大地改善操作员的工作环境及减轻劳动强度。
标签:移动式;PLC控制系统;超声波位计1 控制系统设计要求(1)由于卸料车是移动式的,所以卸料车的电控制柜安装在车体上,本地可实现本地手动/自动控制,同时也可以实现中控系统的远程控制。
(2)安装拨叉开关来判断料仓位置。
(3)安装接近开关作为卸料车行走的正常停车和极限位置的保护元件。
(4)安装接近开关作为卸料位置的定位元件。
(5)使用超声波料位计的反馈信号,来实现卸料车需要在哪个料仓卸料。
2 系统控制的设备卸料车根据工艺要求的不同,小车上所配备的设备也不同,本设计的需要控制的设备有:溜槽堵塞开关、电动翻板、拉绳开关、跑偏开关。
3 控制原理及实施(1)由于卸料车是移动式的,所以卸料车的动力和控制电缆采用拖缆形式,便于安装及运行。
(2)卸料车上的所有设备的命令和反馈线号都接到安装在车上的就地柜中,就地控制柜采用PLC控制。
西门子S7-300的PLC是卸料车核心的控制设备,它将实现与中控系统的通信,以及对车上所有设备的控制。
a.PLC安装在控制柜内,内部有电源、通讯模块、输入/输出模块,AI/AO模块,由这些元件组成一套完整的系统。
b.另外,单设一套动力配电柜,内部有空气断路器、微型断路器、接触器、中间继电器、热保护元件等,由此搭建成一套完整的主回路。
c.操作面板设置在PLC柜上,操作面板上设有前进/后退、本地/远程选择、料仓到位指示灯、左右极限指示灯、故障指示灯等,从这里可以对卸料车进行操作。
(3)在每个料仓上安装一个超声波料位计,通过料位计检测到的煤位信号,通过PLC的分析判断,确定移动到哪个料仓卸料。
(4)当确定移动到哪个料仓卸料时,卸料车将按照指令要求向目标料仓移动。

煤矿自动装车系统0 引言铁路快速装车系统是一种将散装物料按规定的质量快速连续的称量并装入列车车厢的系统,具有一次称量、一次装载、速度快、精度高等特点。
当前在大型煤矿、非煤矿山等企业使用已经非常广泛,但由于受铁路技术水平及检测技术的影响,我国现有装车系统至今没有一家实现全自动控制。
某些环节仍然停留在手动、半自动装车的水平。
我国煤矿的重车称量是与装车同步进行,一种方式是轨道衡置于跨线煤仓仓口或胶带输送机卸料口下方,边装车边称量,通过称量控制装车;另一种方式是跨线多煤口装车线,轨道衡置于跨线煤仓出口,人工预装车后称量,多退少补,往返儿次才能达到准确装车。
随着电了称重业的发展,日前国外己采用大型定量仓快速装车系统,预先在定量仓中按车皮标重自动预装仓,待列车车厢行进经过定量仓仓口时,自动按车厢标重装车,实现快速、准确装车。
快速定量装车系统主要由输煤系统、定量装车机械设备、三级自动取样系统设备、液压控制系统、电脑监控系统等组成。
1 快速定量装车系统功能设计快速定量装车系统通过计算机采集主上煤带式给料机、主上煤带式输送机及各种现场设备的信号,处理接收操作指令后发出正确的控制指令,实现自动连续调节给料、定量自动装车、二级取样、清单打印、动态图面显示等功能。
1.1 装车操作者选定与机车(或调车绞车)的速度、车型相适应的给料量后,被选择的给料机给料,给料量随时由输送带秤(核了秤)反映出来,在计算机内部与设定的给料量比较,从而调节给料机给料量,两者协调一致,确保了装车的连续和稳定值,保证了连续自动调节给料。
当列车到装车塔下时,由系统控制放下装车溜槽,此时缓冲仓料位己到合适的位置。
操作者按下称重循环按钮后,缓冲仓下的4个配料液压平板闸门自动地向定量仓中卸料,同时称重传感器准确地称重、控制完成定量配料。
其后,由闸门控制向车厢中放料,料量放足后由称重传感器控制排料平板闸门关闭。
而后车辆行驶车厢之间的空档距离,这期间缓冲仓又向定量仓继续配料,为下一车厢装车作准备,从而实现连续定量自动装车。
问题研究第37卷2019年第3期(总第201期)基于格雷母线定位技术的备煤卸料小车控制系统设计刘凯党永丰(鞍钢集团自动化有限公司鞍钢股份公司炼焦总厂鞍山114000)【摘要】文章介绍了格雷母线定位系统的构成及原理,并在备煤车间料仓卸料小车上进行了应用,通过使用该技术,实现了卸料小车的精确定位与自动卸料,保障了现场操作人员的安全,提高了工作效率和生产管理水平。
【关键词】卸料小车格輙母麹住置检测令动拉制Design of Control System for Coal Preparation Unloading CarBased on Gray Bus Positioning TechnologyLIU Kai,DANG Yong-feng(Anshan Iron and Steel Group Automation Co.,Ltd.General Coking Plant ofAngang Steel Co.,Ltd.Anshan114000)[Abstract]This paper introduces the structure and principle of Gray bus positioning system,and applies it to the unloading car of the coal preparation work shop.By using this technology,the precise positioning and automatic unloading of the unloading car is realized.This system ensures the safety of operating personnel,and improves work efficiency and production management level.【Key words]unloading car,Gray bus,position detection,automatic control1引言卸料小车的作用就是按照工艺要求将上料皮带机上的物料卸到指定的料仓里,为达到一台卸料小车能给多个料仓卸料,小车需要在料仓之间往复运行。

皮带卸料小车控制系统的改造与应用本文针对皮带卸料小车在日常运行状态下,与其配套搭载的移动电缆滑线小车存在故障率高、维修难度大、维护成本高等问题,设计采用电缆卷筒供电方式结合无线蓝牙传输技术实现皮带卸料小车稳定供电,降低了设备维护成本,提高了设备利用率。
标签:卸料小车;蓝牙;自动控制1、皮带卸料小车简介1.1 用途及其重要性皮带卸料小车是化工生产过程中输送系统必不可少的布料设施,其作用是将给料皮带机上的物料按照指令布料于指定的料仓中。
卸料小车在实现多料仓布料过程中,需要沿着给料皮带机运行方向往复行走,为卸料小车供电的移动电缆滑线小车同样沿滑线往复行走。
在此过程中,移动电缆滑线小车供电的稳定性,直接影响整个系统运行的效率,而移动电缆滑线小车的返修率同样影响着整个系统的设备维护成本。
1.2 结构组成目前,皮带卸料小车因具体使用工段不同,结构存在微小差异,但大体结构相同,机械设备包括送料皮带、收尘罩、卸料可逆皮带、小车轨道、送料皮带架等,电气设备包括卸料小车驱动电机、卸料可逆皮带驱动电机、小车抱闸线圈、皮带跑偏开关等,示意图如图1所示:1、送料皮带2、收尘罩3、卸料可逆皮带4、跑偏检测开关5、小车轨道6、送料皮带架7、旋转编码器2、存在的问题及其原因分析2.1 存在的问题我厂卸料小车配备的控制柜位于低压配电室,供电电缆采用3根三芯柔性电力电缆和2根两芯柔性信号电缆,这5根电缆通过滑线小车与卸料小车连接,并随卸料小车在小车轨道上移动,这种供电和信号传输方式导致滑线小车和电缆频繁出现故障,由此引发DCS控制系统无法实现卸料小车的精准定位。
在实际生产操作过程中,操作人员在现场使用“手动”按钮控制卸料小车实现对不同料仓的卸料,此操作需要操作人员现场看护卸料小车是否到位,而卸料现场环境极差,高粉尘和高噪音严重影响操作人员的身体健康,除此之外,连续的“手动”控制卸料小车,操作人员不能及时掌握料仓的料位,导致进料不均衡,影响后续上料系统的运行,无法充分发挥DCS控制系统的优势。
炼钢铁合金上料系统卸料车的自动定位程序设计论文炼钢铁合金上料系统卸料车的自动定位程序设计论文摘要:介绍了卸料系统的组成和工艺要求,卸料小车控制系统的设计目标以及小车自动寻目标仓控制逻辑的具体实现,上位画面的功能的实现。
关键词:卸料车;自动定位;控制逻辑1卸料系统的组成及工艺要求铁合金上料对于炼钢工艺来讲是个重要的岗位,由于炼钢工艺RH 炉、LF炉、转炉在冶炼过程中都需要铁合金原料,为了提高铁合金上料岗位的工作效率,节约企业的建设成本及运行成本,现铁合金上料系统同时给RH炉、LF炉、转炉上料。
该铁合金上料系统包含RH1炉料仓20个料仓、LF炉料仓16个料仓,1号转炉10个料仓、2号转炉10个料仓,RH2料仓20个料仓,共76个料仓,76台料位计。
料仓分布在皮带的两侧,定义两侧的料仓分别为奇数仓和偶数仓。
两侧料仓对正,所以两侧料仓可以采用一只限位对卸料车的定位。
共38个料仓定位信号,2个极限位,为保证卸料车运行安全,设计2个极限位,极限位防止卸料车超出极限运行。
该系统设计有一台卸料车,一台除尘移动风槽,2条上料皮带,卸料车载有一台翻板机,通过翻板机的左翻、右翻控制料流方向。
2卸料小车控制系统的设计目标卸料小车控制系统的设计初衷主要是提高岗位人员的作业环境,确保工作效率,严格系统在恶劣的环境实现对其进行精确控制,保证上料工作的正常进行。
卸料车的控制模式有机旁、集中手动和集中自动,卸料车在机旁和集中手动模式下用于检修及自动模式下出现故障的时候使用。
由于料仓较多,而且位置较近,为了确保上料的准确性,程序设计做这样规定:移动小车前先选择料仓,同时操作画面上选中的料仓显示对号,或者画面设定目标仓位。
岗位操作人员在画面上设定目标仓位,集中自动模式下,点击卸料车启动后,先根据选择料仓的奇数仓和偶数仓进行运行,翻板到位以后翻板电机停止运行,卸料车根据所选料仓进行前后移动,到达目标仓位以后卸料车停止运行,给料机才可以给皮带上料,从而给料仓上料,由于合金岗位的重要性,这样避免了奇数仓和偶数仓上错料,大大提高了上料的'准确性。
自动化应用软件课程设计题目:装卸料小车多方式运行的PLC控制班级:姓名:学号:指导教师:设计时间:目录摘要 (3)第一章问题描述 (4)1.1 控制任务和功能要求 (4)1.2 问题分析及解决方案 (4)第二章 PLC选型及硬件配置 (6)2.1 硬件配置 (6)2.2 I/O地址分配表 (6)2.3 PLC外部接线图 (7)2.4 控制流程图 (8)第三章系统梯形图程序设计 (9)3.1系统梯形图 (9)3.2 程序调试 (12)心得体会 (19)参考文献 (20)摘要车间有五个工作台,装卸料小车往返于各个工作台之间,根据请求,在某个工作台卸料,每个工作台有位置开关(分别为SQ1----SQ5,小车压上时为ON)和一个呼叫按钮(分别为SB1—SB5)。
当某个工作台呼叫时,分析此时小车可能的相对位置,从而确定小车的运动方向(向左、向右或不动)。
根据分析绘制流程图,进而用梯形图程序实现了装卸料小车多方式运行的PLC控制。
关键词:送料小车 PLC控制控制仿真第一章问题描述某车间有五个工作台,装卸料小车往返于各个工作台之间,根据请求,在某个工作台卸料,每个工作台有位置开关(分别为SQ1----SQ5,小车压上时为ON)和一个呼叫按钮(分别为SB1—SB5)。
装卸小车有3种运行状态,左行(电动机正转)、右行(电动机反转)和停车。
1.1 控制任务和功能要求1.假设小车的初始位置是停在m(m=1~5)号工作台,此时SQm为ON。
2.假设n(n=1~5)号工作台呼叫,如果:·m>n, 小车左行到呼叫工作台停车。
·m<n, 小车右行到呼叫工作台停车。
·m=n, 小车不动。
3.小车的停车位置应有指示灯指示。
小车运行条件:运料小车右行条件:小车在1、2、3、4号工作台,5号工作台呼叫;小车在1、2、3号工作台,4号工作台呼叫;小车在1、2号工作台,3号工作台呼叫;小车在1号工作台,2号工作台呼叫,以上为小车右运行条件。
河南工业职业技术学院Henan Polytechnic Institute毕业设计(论文)题目基于PLC的装卸料小车控制系统设计摘要早期装卸料小车电气控制系统多为继电器-接触器组成的复杂系统,随着经济的发展,运料小车不断扩大到各个领域,从手动到自动,逐渐形成了机械化、自动化。
将PLC应用到装卸料小车电气控制系统以其可靠性高、逻辑性能强、体积小、可在线修改控制程序、具有远程通讯联网功能、易于与计算机接口、能对模拟量进行控制、具备高速计数与控制等高性能模块等的优异性能,正在日益取代大量中间继电器、时间继电器、计数继电器等组成的传统继电器-接触器控制系统,在机械、化工、石油、冶金、电力、轻工、电子、纺织、食品、交通等行业得到广泛应用。
PLC应用的深度和广度已经成为一个国家工业先进水平的重要标志之一,只要经过精心的布置安排,PLC能够实现几乎所有目前实际生产中的动作。
本课题要求两台正反转电动机分别控制小车的加料、卸料的动作。
自动装卸线通过PLC控制能够按规定顺序自动完成所要求的所有动作。
本设计课题仅较浅层次的讨论了PLC控制自动装卸线的动作控制过程。
关键词:PLC,控制系统,组态目录前言 (1)第1章绪论 (3)1.1 课题背景 (3)1.2 运料小车控制发展的历程 (4)1.3 PLC的循环扫描工作 (4)第2章设计要求 (5)2.1 控制系统工作原理 (5)2.2 控制要求 (6)2.3 设计步骤 (6)第3章控制系统硬件设计 (7)3.1 主电路图 (7)3.2 主要硬件设备 (7)3. 2.1 PLC的选型 (7)3. 2.1 电动机的选择 (8)3.3 I/O接线图 (9)3.4 I/O地址分配 (10)第4章PLC程序设计 (11)4.1 程序设计 (11)4.1.1 程序梯形图 (11)4.1.2 程序指令语句 (14)第5章系统调试及组态设计 (17)5.1 PLC程序功能调试 (17)5.1.1 PLC与计算机通信设置 (17)5.1.2 计算机与PLC在线连接的建立 (17)5.1.3 下载程序 (17)5.1.4 运行和调试程序 (18)5.2 组态系统设计 (18)5.2.1安装组态王软件 (18)5.2.2 使用组态王 (18)5.2.3 组态画面 (22)结论 (24)谢辞 (1)参考文献. (1)前言随着我国社会经济的迅速发展,人民物质文化生活水平日益提高,随着工业自动化的普及和发展,控制器的需求量逐年增大,为了改变落后的生产状态,缓解日趋紧张的供求关系,我们研究了多功能小车。
学号1151401137《电气与PLC控制技术及应用》课程设计( 2011级本科)题目:基于S7-200PLC的装卸料小车控制系统设计学院:物理与机电工程学院专业:电气工程及其自动化作者姓名:邢波指导教师:张静完成日期: 2014 年 7 月 4 日学生姓名邢波学号1151401137专业方向电气工程及其自动化班级111题目名称基于S7-200PLC的装卸料小车控制系统设计一、设计的主要内容1.设计的目的和意义2.总体设计内容3.硬件设计4.软件设计5.程序调试6.设计总结二.设计要求试利用s7-200plc进行装卸料小车控制系统设计。
如下图在生产现场中,尤其是在一些自动化生产线上,经常会遇到一台送料车在生产线上根据要求,多地点随机卸料;或是装料车多地点搜集成品。
如果所按选择小车停车位置的按钮号与小车所压下的行程开关号相等时,按下起动按钮,小车停车。
不想等则行驶致呼叫站呼叫号相等的行程开关处。
目录1.设计的目的和意义 (1)2.总体设计内容 (1)2.1课程设计要求分析 (1)2.2课程设计内容 (2)3.硬件设计 (4)3.1电器元件的选择 (4)3.2电器原理图 (4)3.3主电路图 (5)4.软件设计 (7)4.1 I/O地址分配表 (7)4.2 I/O接线图 (8)5.软件设计 (9)6.程序调试 (15)7.设计总结 (19)附录:图(表)录 (20)参考文献 (21)1.设计的目的和意义现代生产和科学技术的发展,台车呼叫控制系统已经被广泛应用于各种场合,属于物流自动化的一种,使其作业过程的设备和设施自动化,包括运输、装卸、包装、分拣、识别等作业过程,是工业生产的自动运输加工系统,例如台车炉,台车炉是属于周期式作业炉,炉膛不分区域。
台车炉的结构:炉底为一可移动的台车。
加热前,台车在炉外装料,加热件放在专用的垫铁上,然后由牵引机构将台车拉入炉内进行加热,加热之后再由牵引机构将台车拉出炉外卸料,之后或用吊车将加热的工件吊到锻压设备上进行加工。
储煤槽卸料车自动控制方案的设计与应用卸料小车/高速计数器/自由口通信1 引言料槽卸料车主要作用是根据工艺需要在料槽上移动给各料槽分别进行装料。
属于一种在轨道上行走的移动机械,根据料槽数量不同其一般走行距离有数十米到百余米。
储料槽是物料的装卸点,有粉尘浓度高、工作环境差等特点。
在一些工艺控制较为复杂的场合,储煤槽卸料车上有很多设备。
如某厂的储煤槽卸料车上装有:摆动溜槽、电缆卷筒、料车行走装置、溜槽堵塞检测、行走报警装置、行走定位装置、集尘装置……等众多设备。
实现卸料小车的远程自动化控制对改善操作人员的工作环境和减轻劳动强度等方面有重要意义。
自动卸料小车重要设备如图1所示.2 方案介绍小车定位技术小车是在轨道上移动的设备,实时而准确的监控小车的位置是卸料车控制系统的核心内容。
传统的定位方式是通过在沿着小车轨道附近连续安装多个具有地址编码的固定标尺,与安装在小车上的活动标尺通信来实现的。
当小车移动的时候,随小车上活动标尺扫描安装在铁轨附近的固定标尺。
当对准某个固定标尺时,该固定标尺就会把自己的地址编号发给活动标尺,活动标尺再把当前扫描到的地址以通信的方式发送给S7-200PLC。
这样随着小车的移动,PLC就会收到连续变化的固定标尺地址,从而确定小车的位置。
这种方法的弊端是需要沿着铁轨在小车经过的任何位置都要安装固定标尺,项目实施安装难度大,而且成本很高。
鉴于上述情况我们选用旋转编码器计算小车走过的距离,再用固定标尺与移动标尺进行位置校正的方式对校车进行定位。
在小车车轴上安装旋转编码器,当小车移动时会带动旋转编码器转动发出脉冲,编码器与PLC相连,根据脉冲数记录下下车走过的距离。
小车在移动或刹车的时候会在铁轨上滑动,这种滑动产生的位置变化编码器监测不到,所以需要添加校正装置。
校正装置可以选用在轨道上特定的几个位置安装接近开关,对小车位置值进行校正。
考虑到接近开关没有地址,PLC 不能直接识别小车具体接近了哪个校正点,故选用固定标尺和移动标尺来校正。
在特定位置选取几个有代表性的位置点安装固定标尺,当小车走过固定标尺的时候,编码器所计算出来的位置值就会被固定标尺的位置值所刷新和替代。
这种方法既能实时反应小车的准确位置,又减少的固定标尺的安装数量,降低了项目实施难度和成本。
标尺安装如图2所示:旋转编码器的安装是小车定位系统中另一关键问题。
旋转编码器与车轴中心伸出的连接杆用联轴器相连,但是连接杆存在约1.5cm的径向偏移,小车在运动过程中,连接杆末端位置不断变化,而联轴器允许的最大误差只有1mm,如果强行连接的话会损坏旋转编码器。
鉴于上述情况本项目采用可伸缩的万向节来代替联轴器,万向节能够既能保证大角度的偏差,又能保证旋转的流畅性而且价格很低,几乎完全缓冲掉了径向偏移误差对编码器产生的作用力,保证了编码器的安全运行。
现场安装如图3所示:2.1 动力电缆输送技术改进移动设备的动力电缆一般采用滑轮拖动方式来输送动力电。
滑轮拖动装置长时间使用之后滑动顺畅程度会降低,现场安装难度也比较大。
本项目采用电缆卷筒来实现小车动力电的输送工作,电缆卷筒上的扁电缆一端接到地面电源上,另一端进入电缆卷筒滑环处,给小车供电。
当小车前进时电缆卷筒正传放线,当小车后退时电缆卷筒翻转把电缆卷起。
电缆卷筒的卷曲速度是可调的,很容易就能达到与小车同步运行的状态。
电缆卷筒安装方便,维护容易。
2.2 小车远程控制小车上所有设备的状态和命令信号都接到车上的PLC上,再与地面中控室PLC进行通信,实现中控室对小车的远程控制。
车上PLC与地面PLC之间通信有两种方式:(1) 从车上PLC引出网线,将网线与电缆卷筒上的电缆放在一起,再接到地面的交换机上。
(2) 在车上和地面都安装无线电台,用无线电台代替物理网线。
第一种方法中网线需要与小车的动力电缆放在一起,在电缆卷筒扁电缆中加网线需要特殊定做,动力电缆对网线信号传输会有较强的干扰作用,而且网线较细,长时间随小车运动而卷曲和松开会容易损坏。
小车是移动设备,安全是第一要素,再综合上述因素,故选取第二种方案:以无线通信的方式将小车上所有信号发送到中控室。
这样既保证了通信的安全性,又不需要铺设通信电缆。
3 小车控制逻辑,3.1 移动标尺与S7-200PLC通信[1]移动标尺通过自由口通信的方式将得到的固定标尺地址编码发送给PLC。
PLC得到地址编码以后便得知小车已经到达了校正的位置,同时刷新旋转编码器计数值,对小车位置进行校正。
自由口通信指令如下:NETWOR K 1 // 主程序LD SM0.1 // 首次扫描时,MOVB 16#09 SMB30 // 初始化自由端口:选择9600波特,选择8个数据位,选择无校验MOVB 16#B0 SMB87 // 初始化RCV信息控制字节: RCV被启用,检测到信息字符结束,将空闲行条件检测为,信息开始条件。
MOVB 16#0A SMB89 // 将信息字符结束设为hex OA(换行符)。
MOVW +5 SMW90 //将空闲行超时设为5毫秒。
MOVB 100 SMB94 // 将最大字符数设为100。
ATCH INT_0 23//将中断附加在接收完成事件上。
ATCH INT_2 9 // 将中断2附加在传送完成事件上。
ENI // 启用用户中断RCV VB100 0 // 为端口0在VB100位置启用带缓冲区的接收方框NETWOR K 1 // 中断0// 接收完成中断例行程序LDB= SMB86 16#20 // 如果接收状态显示接收结束字符,MOVB 10 SMB34 //则附加一个10毫秒计时器,ATCH INT_1 10 // 触发传送CRETI // 并返回。
NOTRCV VB100 0 // 如果因任何其他原因接收完成,则开始新的接收。
NETWOR K 1 // 中断1,10毫秒计时器中断LD SM0.0DTCH 10 // 分离计时器中断XMT VB100 0 // 将信息传送回端口0中的用户3.2 高速计数器初始化向导和计数值刷新(1) 高速计数器初始化增量式旋转编码器脉冲计数通过HSC配置导来实现,选择计数器为HSC1的模式9,向导截图如图4所示:在该模式下旋转编码器A相输入点为I0.6,B相输入点为I0.7,配置完成后自动生成包含高速计数器初始化指令的子程序HSC_INIT(SBR5),SBR5中包含的指令如下:LD Always_On:SM0.0MOVB 16#F8, HSC1_C trl:SMB47 //设置控制位:增计数;4X 速率;已使能;MOVD +0, HSC1_CV:SMD48 //装载CVMOVD +0, HSC1_PV:SMD52 //装载PVHDEF 1, 9ENIHSC 1再在OB1中调用SBR5即可实现对旋转编码器脉冲的高速计数功能。
(2) 通过高速计数器的计数值刷新实现小车位置的校正实际中小车每前进7.85mm则旋转编码器发送一个脉冲,所以脉冲数与小车移动的距离有直接关系。
要实现小车位置校正,只要对HSC1的计数值进行刷新即可实现。
例如1号固定标尺安装在10米处,小车走10米时,高速计数器应发送1274个脉冲。
当小车走到1号固定标尺位置时,无论HSC1为何值均被刷新为1274,这样便实现了小车位置的校正。
刷新指令如下:LD 标尺位校正:M0.0LPSEUMOVB 16#C0, HSC1_C trl:SMB47LRDAW= wrdAddress:VW0, 10MOVD 1274, HSC1_CV:SMD483.3 小车S7-200PLC与中控室S7-400冗余PLC的以太网通信(1) 以太网通信初始化[2]。
小车上所有设备的相关信号都要通过以太网发送到中控制的PLC中去,进而实现小车的远程监控。
以太网通信是通过以太网配置向导实现的,配置部分截图如图5所示:通信区域为VB10至VB19为小车向中控室PLC发送的数据区与,VB20至VB29为小车接受中控室发来数据的存储区域,上述发送和接受的地址并没有全部用完,剩下的地址留作备用。
(2) 以太网通信冗余切换[3]S7-200PLC是不支持冗余通信的。
要实现与中控室S7-400冗余PLC进行通信需要编写相应的程序实现冗余切换。
由于S7-400H冗余控制器由RACK0和RACK1两个子系统组成,每个子系统包括单独的控制器和C P443-1以太网通讯模板。
冗余切换基本原理如下:分别建立S7-200与RACK0和RACK1控制器的通讯,双方在交换的数据里发送心跳检测信号。
通过心跳信号判断两个连接的通讯状态,决定程序里采用哪个连接的数据,实现了通讯的“冗余”。
3.4 小车运行逻辑(1) 安全逻辑①小车设置了预启动命令,只有预启动常开触点吸合之后,控制小车上的锁轨器、小车走行电机和电液翻板的继电器才能动作。
②在锁轨器夹紧状态下,小车走行电机不3 能动作。
③小车撞击到前后任意一个极限开关时均停止运动,只能向反方向行走。
(2) 自动走行逻辑在小车打到自动状态下时,小车走行与锁轨器配合动作。
操作工在远程监控画面上输入小车位置设定值,PLC先自动松开锁轨器,接着判断小车应该前进,还是应该后退;小车依据判断结果按照指定方向运行,到位后小车停止,夹紧锁轨器。
当小车在前进过程中需要反向行走的时候,小车先停止,时间到后反向行走,到位后夹紧锁轨器。
4 结束语本论文对卸料小车控制系统做了大量的探索和改进,在硬件选型和软件控制逻辑均作了比较全面而合理的设计。
小车走行在软件和硬件上都加了必要的保护措施,使小车运行安全稳定。
定位和校正装置保证了中控室能够及时准确的监控到小车实时位置。
远程冗余通信实现了小车上所有设备在中控室的集中远程监控。
本方案在减少了项目实施过程中的工作量、降低了施工难度、节约了项目成本的前提下,实现了预期的功能,满足了客户需求。
佟立兵。