优选自动控制原理结构图化简
- 格式:ppt
- 大小:1.17 MB
- 文档页数:25
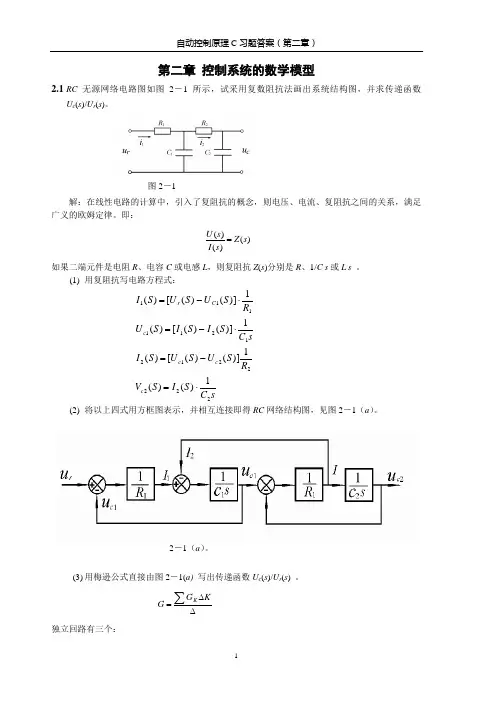
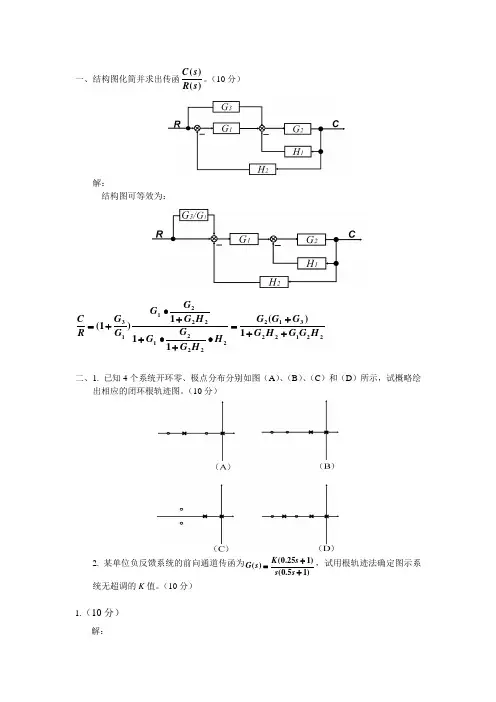
一、结构图化简并求出传函)()(s R s C 。
(10分)解:结构图可等效为:22122312222212221131)(111)1(H G G H G G G G H H G G G H G G G G G R C+++=∙+∙++∙+=二、1. 已知4个系统开环零、极点分布分别如图(A )、(B )、(C )和(D )所示,试概略绘出相应的闭环根轨迹图。
(10分)2. 某单位负反馈系统的前向通道传函为)15.0()125.0()(++=s s s K s G ,试用根轨迹法确定图示系统无超调的K 值。
(10分)1.(10分)解:2.(10分)解:先求分离点/汇合点坐标d.⎪⎪⎩⎪⎪⎨⎧=++-==++-=⇒⎩⎨⎧-=-=⇒±-=⇒-=-+314.23)125.0()15.0(686.0)125.0()15.0(83.617.1224412112222111121d d d K d d d K d d d d d d系统无超调的K 取值范围为:314.23686.0><K K 或。
三、稳定性判定(20分)1. 谋系统的闭环特征方程为 0233234=++++K s s s s , 试问K 取何值时,系统稳定。
2. 如图所示开环系统幅相曲线(1)、(2)、(3)对应的传函分别为:)1)(1)(1()()()1(321+++=s T s T s T K s H s G ,)1)(1()()()2(21++=s T s T s K s H s G321)1)(1()()()3(ss T s T K s H s G ++=。
(已知0,,,321>K T T T ),试判定各系统的稳定性。
1.解:劳斯表如下:Ks s Ks s Ks K 079141234372331-系统稳定的充要条件是劳斯表第一列不变符号,则有9140<<K 2. 解:(1)22=-=R P Z , 系统不稳定。
自动控制原理试题及答案一、填空题(每空 1 分,共15分)1、反馈控制又称偏差控制,其控制作用是通过 与反馈量的差值进行的.2、复合控制有两种基本形式:即按 的前馈复合控制和按 的前馈复合控制。
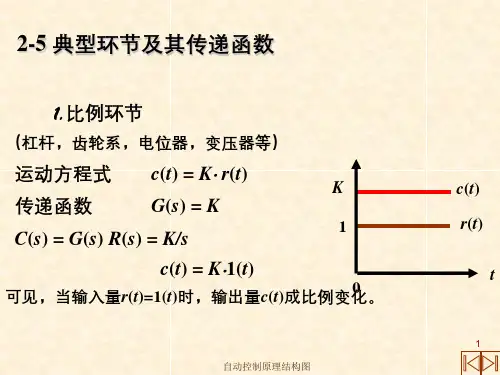
3、两个传递函数分别为G 1(s )与G 2(s )的环节,以并联方式连接,其等效传递函数为()G s ,则G (s )为 (用G 1(s )与G 2(s) 表示).4、典型二阶系统极点分布如图1所示, 则无阻尼自然频率=n ω , 阻尼比=ξ ,该系统的特征方程为 , 该系统的单位阶跃响应曲线为 .5、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,则该系统的传递函数G(s)为 。
6、根轨迹起始于 ,终止于 .7、设某最小相位系统的相频特性为101()()90()tg tg T ϕωτωω--=--,则该系统的开环传递函数为 .8、PI 控制器的输入-输出关系的时域表达式是 ,其相应的传递函数为 ,由于积分环节的引入,可以改善系统的 性能。
二、选择题(每题 2 分,共20分)1、采用负反馈形式连接后,则 ( )A 、一定能使闭环系统稳定;B 、系统动态性能一定会提高;C 、一定能使干扰引起的误差逐渐减小,最后完全消除;D 、需要调整系统的结构参数,才能改善系统性能。
2、下列哪种措施对提高系统的稳定性没有效果 ( )。
A 、增加开环极点;B 、在积分环节外加单位负反馈;C 、增加开环零点;D 、引入串联超前校正装置。
3、系统特征方程为 0632)(23=+++=s s s s D ,则系统 ( ) A 、稳定; B 、单位阶跃响应曲线为单调指数上升; C 、临界稳定; D 、右半平面闭环极点数2=Z 。
4、系统在2)(t t r =作用下的稳态误差∞=ss e ,说明 ( )A 、 型别2<v ;B 、系统不稳定;C 、 输入幅值过大;D 、闭环传递函数中有一个积分环节。
浅谈《自动控制原理》中动态结构图的化简作者:张健来源:《新课程·教育学术》2010年第04期摘要:学习《自动控制原理》,死搬硬套公式,往往容易局限思维,而且一旦记忆出现偏差,错误就会增多;如果深入理解原理,摸出其中规律,就会灵活多样地解决问题,本文提出了化简动态结构图的一点规律和解题技巧。
关键词:自动控制动态结构图支路干路动态结构图是系统数学模型的一种形式,用它来表示控制系统,不仅能简明地表示出系统中各变量之间的数学关系及信号的传递过程,也能根据等效变换的原则,将复杂的动态结构图化简,求出系统的传递函数,以便分析系统。
对于用等效变换方法化简动态结构图,本人在长期的教学实践过程中,总结出一点方法和技巧,在这里和大家交流。
一、动态结构图化简的入手点动态结构图由混合点、方框图、信号线和引出点组成,对于初学者或者当动态结构图较为复杂时,在化简时往往会感到无从下手。
其实只要把握住最基本的原则,再复杂的问题也会迎刃而解。
基本的原则是相邻的混合点或引出点可以交换或合并,而相邻的混合点和引出点一般不做交换。
举例言之图(1)。
根据上述原则,可知①和②、②和③、③和④、④和⑤、⑤和⑥均不可以交换或合并,而仅有②和⑥为相邻混合点,可以交换或合并,而此题的入手点也正在于此。
因此,掌握了基本原则,便会很快根据基本原则找到解题入手点。
找到入手点,便可以对动态结构图进行化简。
等效变换的基本化简方法一般教科书均分为四种:1.混合点和引出点的交换或合并。
2.串联和并联的等效变换。
3.反馈连接的等效变换。
4.综合点和引出点的移动。
前三种化简方法比较简单,易于理解和掌握。
对于第四种方法,本人提出综合点和引出点移动的干路和支路化简方法。
二、混合点和引出点移动的干路和支路法1.在变换前首先分清干路和支路所谓支路就是根据信号流向指向混合点的路径或者由引出点引出的路径。
所谓干路就是根据信号流向由综合点引出的路径或指向引出点的路径。
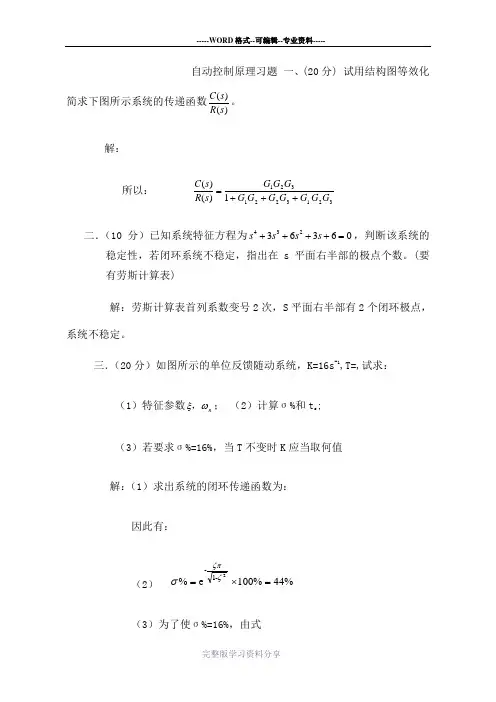
自动控制原理习题 一、(20分) 试用结构图等效化简求下图所示系统的传递函数)()(s R s C 。
解:所以:32132213211)()(G G G G G G G G G G s R s C +++= 二.(10分)已知系统特征方程为06363234=++++s s s s ,判断该系统的稳定性,若闭环系统不稳定,指出在s 平面右半部的极点个数。
(要有劳斯计算表)解:劳斯计算表首列系数变号2次,S 平面右半部有2个闭环极点,系统不稳定。
三.(20分)如图所示的单位反馈随动系统,K=16s -1,T=,试求:(1)特征参数n ωξ,; (2)计算σ%和t s ;(3)若要求σ%=16%,当T 不变时K 应当取何值解:(1)求出系统的闭环传递函数为:因此有:(2) %44%100e %2-1-=⨯=ζζπσ(3)为了使σ%=16%,由式可得5.0=ζ,当T 不变时,有:四.(15分)已知系统如下图所示,1.画出系统根轨迹(关键点要标明)。
2.求使系统稳定的K 值范围,及临界状态下的振荡频率。
解① 3n =,1,2,30P =,1,22,1m Z j ==-±,1n m -=②渐进线1条π ③入射角同理 2ϕ2135sr α=-︒ ④与虚轴交点,特方 32220s Ks Ks +++=,ωj s =代入222K K-0=1K ⇒=,s = 所以当1K >时系统稳定,临界状态下的震荡频率为ω。
五.(20分)某最小相角系统的开环对数幅频特性如下图所示。
要求(1) 写出系统开环传递函数;(2) 利用相角裕度判断系统的稳定性;(3) 将其对数幅频特性向右平移十倍频程,试讨论对系统性能的影响。
解(1)由题图可以写出系统开环传递函数如下:(2)系统的开环相频特性为截止频率 1101.0=⨯=c ω相角裕度:︒=+︒=85.2)(180c ωϕγ故系统稳定。
(3)将其对数幅频特性向右平移十倍频程后,可得系统新的开环传递函数其截止频率 10101==c c ωω而相角裕度 ︒=+︒=85.2)(18011c ωϕγγ=故系统稳定性不变。
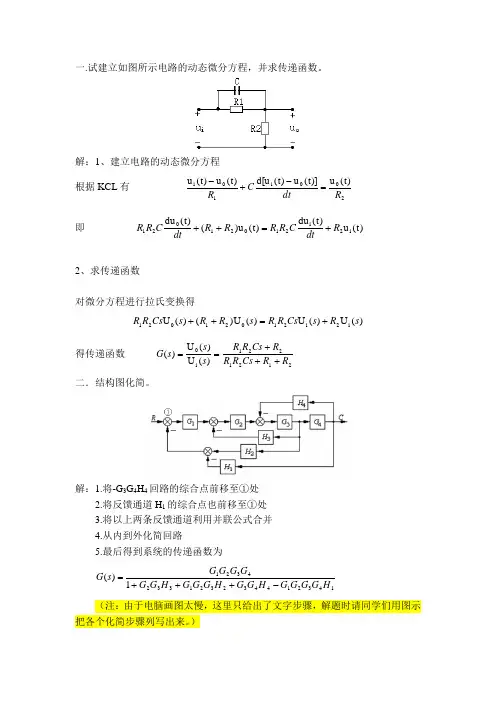
一.试建立如图所示电路的动态微分方程,并求传递函数。
解:1、建立电路的动态微分方程 根据KCL 有200i 10i )t (u )]t (u )t (d[u )t (u )t (u R dt C R =-+-即 )t (u )t (du )t (u )()t (du i 2i 21021021R dtC R R R R dt C R R +=++2、求传递函数对微分方程进行拉氏变换得)(U )(U )(U )()(U i 2i 21021021s R s Cs R R s R R s Cs R R +=++得传递函数 2121221i 0)(U )(U )(R R Cs R R R Cs R R s s s G +++== 二.结构图化简。
解:1.将-G 3G 4H 4回路的综合点前移至①处2.将反馈通道H 1的综合点也前移至①处3.将以上两条反馈通道利用并联公式合并4.从内到外化简回路5.最后得到系统的传递函数为14321443232133243211)(H G G G G H G G H G G G H G G G G G G s G -+++=(注:由于电脑画图太慢,这里只给出了文字步骤,解题时请同学们用图示把各个化简步骤列写出来。
)三.系统结构图如图所示:1、写出闭环传递函数()()()C s s R s Φ=表达式; 2、要使系统满足条件:707.0=ξ,2=n ω,试确定相应的参数K 和β; 3、求此时系统的动态性能指标s t ,00σ;4、t t r 2)(=时,求系统由()r t 产生的稳态误差ss e ;解:1. 22222221)()()(n n n s s K s K s K sK s K s Ks R s C s ωξωωββ++=++=++==Φ 2. ⎩⎨⎧=====2224222n n K K ξωβω ⎩⎨⎧==707.04βK 3. 0010032.42==--ξξπσe12.2233===ns t ξω 4. )1(1)(1)(2+=+=+=s s K s s K sK s K s G βββ ⎩⎨⎧==11v K K β 414.12===βKss K Ae (注:考虑再三,还是决定把时域性能指标(超调量、峰值时间、调节时间)的公式告诉大家,到时会写在黑板上。
掌握自动控制系统的一般概念(控制方式,分类,性能要求)6.(1)结构框图:Ug U Udn Uc UUr给定输入量: 给定值Ug 被控制量: 加热炉的温度扰动量: 加热炉内部温度不均匀或坏境温度不稳定等外部因素 被控制对象:加热器控制器: 放大器、发动机和减速器组成的整体 (2)工作原理:给定值输入量Ug 和反馈量Ur 通过比较器输出 U , 经放大器控制发动机的转速n ,再通过减速器与调压器调节加热器的电压U 来控制炉温。
T Ur U Ud n Uc U T7.(1)结构框图 略给定输入量:输入轴θr 被控制量: 输出轴θc扰动量: 齿轮间配合、负载大小等外部因素 被控制对象:齿轮机构 控制器: 液压马达 (2)工作原理:θc Ue Ug i θm θc比较器 放大器 减速器 调压器 电动机 加热器 热电偶干扰量实际温度掌握系统微分方程,传递函数(定义、常用拉氏变换),系统框图化简;1.(a)⎪⎪⎪⎩⎪⎪⎪⎨⎧=+=+=dtdu C i R u i i u iR u t ct ct t r )(02)(0)(01)()2......()1(.......... 将(2)式带入(1)式得:)()(01)(021)(0t r t t t u dtdu C R u R R u =++拉氏变换可得)()(01)(0221s r s s U CsU R u R R R =+⎪⎪⎭⎫ ⎝⎛+整理得 21212)()(0)(R R Cs R R R U U G S r S s ++==1.(b)⎪⎪⎪⎩⎪⎪⎪⎨⎧=+=+=dtdi L u R u i i u iR u Lt o t Lt t r )(2)(0)(01)()2........()1......(.......... 将(2)式代入(1)式得)()(0221)(01t r t t u u R R R dt u L R =++⎰ 拉氏变换得)()(0221)(01s r s s U U R R R U Ls R =++ 整理得LsR R R R LsR U U G s r s s )(21212)()(0)(++==2.1)微分方程求解法⎪⎪⎪⎩⎪⎪⎪⎨⎧+=-=+=-31224203221211111Rudt du c Ruu R u R u Rudt du c R u u c c c c c c c c r中间变量为1c u,2c u及其一阶导数,直接化简比较复杂,可对各微分方程先做拉氏变换⎪⎪⎪⎩⎪⎪⎪⎨⎧+=-=+=-3122423221211111RUU sc R U U RU R U RUU sc R U U c c c c c c c c r移项得⎪⎪⎪⎩⎪⎪⎪⎨⎧++==++=2432432211211)11()111(c c c c rUR R sc RU R RU U U R R sc R U可得11121432432143214320)111()11(RR sc R R R R sc R R R R R R R R sc R R sc Ur U ++++=++++=2)复阻抗法⎪⎪⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎪⎪⎨⎧+=+++=++=2211232223234212121111*11*11sc R sc z U sc R sc z U sc R sc R R z sc R sc R R z r解得:1112143243RR sc R R R R sc R R Ur U ++++=3.分别以m 2,m 1为研究对象(不考虑重力作用)⎪⎪⎩⎪⎪⎨⎧--=---=11212121121222222)()()(ky dty y d c dt y d m dty y d cdt dy c t f dt y d m 中间变量含一阶、二阶导数很难直接化简,故分别做拉氏变换⎪⎩⎪⎨⎧--=---=112112112122222)()()(kY Y Y s c Y s m Y Y s c sY c s F Y s m 消除Y1中间变量21211222))1(()(Yk s c s m sc s c s c s m s F s++-++=10.系统框图化简:G 1(s)G 2(s)G 3(s)X i (s)X o (s)+H 1(s)H 3(s)H 2(s)---++G 1(s)G 2(s)G 3(s)X i (s)X o (s)+H 1(s)H 3(s)H 2(s)/G 1(s)G 3(s)---+G 1(s)/(1+G 1(s)H 1(s))G 2(s)G 3(s)/(1+G 3(s)H 3(s))X i (s)X o (s)+H 2(s)/G 1(s)G 3(s)-G 1(s)G 2(s)G 3(s)/(1+G 1(s)H 1(s))(1+G 3(s)H 3(s))X i (s)X o (s)+H 2(s)/G 1(s)G 3(s)- +1.综合点前移,分支点后移G 1(s)G 2(s)G 3(s)X i (s)X o (s)+H 1(s)H 3(s)H 2(s)/G 1(s)G 3(s)---++2.交换综合点,交换分支点3.化简1231133221231133221133()()()()()(1()())(1()())()()()()()1()()()()()()()()()()o i X s G s G s G s X s G s H s G s H s G s H s G s G s G s G s H s G s H s G s H s G s H s G s H s =+++=++++11.系统框图化简:G 1(s)G 2(s)G 3(s)X i (s)X o (s)+H 1(s)-++ 1.综合点前移,分支点后移2.交换综合点,合并并联结构H 4(s)G 4(s)H 2(s)H 3(s)++--G 1(s)G 2(s)G 3(s)X i (s)X o (s)+H 1(s)/G 1(s)G 4(s)-+H 4(s)/G 1(s)G 2(s)G 4(s)H 2(s)/G 4(s)H 3(s)++--+-G 1(s)G 2(s)G 3(s)X i (s)X o (s)+-G 4(s)H 2(s)/G 4(s)-H 3(s)-H 1(s)/G 1(s)G 4(s)+H 4(s)/G 1(s)G 2(s)3.化简G 1(s)G 2(s)G 3(s)G 4(s)X i (s)X o (s)+-H 2(s)/G 4(s)-H 3(s)-H 1(s)/G 1(s)G 4(s)+H 4(s)/G 1(s)G 2(s)12341234243114412123123212343231344()()()()()()1()()()()(()/()()()/()()()/()())()()()1()()()()()()()()()()()()()()(o i X s G s G s G s G s X s G s G s G s G s H s G s H s H s G s G s H s G s G s G s G s G s G s G s G s H s G s G s G s G s H s G s G s H s G s G s H =+--+=+--+)s第三章掌握时域性能指标,劳斯判据,掌握常用拉氏变换-反变换求解时域响应,误差等2.(1)求系统的单位脉冲响应12()()()TsY(s)+Y(s)=KX(s)X(s)=1Y(s)=1()=20e t tTT y t y t Kx t K Ts k w t e T∙--+=+=已知系统的微分方程为:对微分方程进行零初始条件的拉氏变换得当输入信号为单位脉冲信号时,所以系统输出的拉式变换为:进行拉式反变换得到系统的时域相应2.(2)求系统的单位阶跃响应,和单位斜坡响应22()()()TsY(s)+Y(s)=KX(s)X(s)=5Y(s)=1111110()10-10e ;1X(s)=Y(s)=t T y t y t Kx t KTK Ts Ts Ts sK s s s y t s∙-+=+++=-=-=已知系统的微分方程为:对微分方程进行零初始条件的拉氏变换得当输入信号为单位阶跃信号时,所以系统输出的拉式变换为:进行拉式反变换得到系统的时域相应当输入信号为单位阶跃信号时,所以系统输出的拉式变换为:22222110550111()510t+5e ;t K K KT T K Ts s s s Ts s s Ts y t -=-+=-++++=-+进行拉式反变换得到系统的时域相应9.解:由图可知该系统的闭环传递函数为22()(22)2b kG s s k s kτ=+++ 又因为:2122%0.20.512222r n n n e t k kπξξσπβωξξωτω--⎧⎪==⎪-⎪==⎨-⎪=+⎪⎪=⎩ 联立1、2、3、4得0.456; 4.593;10.549;0.104;n K ξωτ==== 所以0.76931.432p ds nt s t sπωξω====10.解:由题可知系统闭环传递函数为210()1010b kG s s s k=++ 221010n nk ξωω=⎧⎪⎨=⎪⎩ 当k=10时,n ω=10rad/s; ξ=0.5;所以有2/12%16.3%0.36130.6p n s n e t s t sπξξσπωξξω--⎧⎪==⎪⎪⎪==⎨-⎪⎪⎪==⎪⎩当k=20时,n ω=14.14rad/s; ξ=0.35;所以有2/12%30.9%0.24130.6pn s n e t s t sπξξσπωξξω--⎧⎪==⎪⎪⎪==⎨-⎪⎪⎪==⎪⎩当0<k<=2.5时,为过阻尼和临界阻尼,系统无超调,和峰值时间;其中调整时间不随k 值增大而变化; 当k>2.5时,系统为欠阻尼,超调量σ%随着K 增大而增大,和峰值时间pt 随着K 增大而减小;其中调整时间s t 不随k 值增大而变化;14.(1)解,由题可知系统的闭环传递函数为32560-1403256000056014014k 00()1440kb k k k s s s ks kG s s s s k->><<∴=+++∴⎧⎨⎩∴劳斯表系统稳定的充要条件为:14.(2)解,由题可知系统的闭环传递函数为320.60.8832430.60.80010.20.80.210.8k 00(1)()(1)k b k k k kk s s s ks k s G s s s k s k-->>>>-∴+=++-+∴⎧⎪⎨⎪⎩∴劳斯表系统稳定的充要条件为:20.解:由题可知系统的开环传递函数为(2)()(3)(1)k k s G s s s s +=+-当输入为单位阶跃信号时,系统误差的拉氏变换为11()111()lim limlim ()0k ss k ssss s s k s ss G s E G s ssE G s e →→→+=+===∞∴=又根据终值定理e 又因为25.解:由题可知系统的开环传递函数为1212()(1)(1)k k k G s T s T s =++当输入为给定单位阶跃信号时1()i X s s=,系统在给定信号下误差的拉氏变换为111211211()111()lim limlim ()11k ss k ss ss s s k s ss G s E G s ssE G s k k e k k →→→+=+===∴=+又根据终值定理e 又因为当输入为扰动信号时1()N s s=,系统扰动信号下误差的拉氏变换为22121122212212121()111()lim limlim ()111k ss k ss ss s s k s ss ss ss ss k G s k T s E G s ssE G s k k k e k k k e e e k k →→→-+-+=+===-∴=+-∴=+=+又根据终值定理e 又因为第四章 根轨迹法掌握轨迹的概念、绘制方法,以及分析控制系统4-2 (2)G(s)=)15.0)(12.0(++s s s K;解:分析题意知:由s(0.2s+1)(0.5s+1)=0得开环极点s 1=0,s 2=-2,s 3=-5。