自动控制原理第二章3
- 格式:ppt
- 大小:1.78 MB
- 文档页数:24
⾃动控制原理第⼆章复习总结(第⼆版)第⼆章过程装备控制基础本章内容:简单过程控制系统的设计复杂控制系统的结构、特点及应⽤。
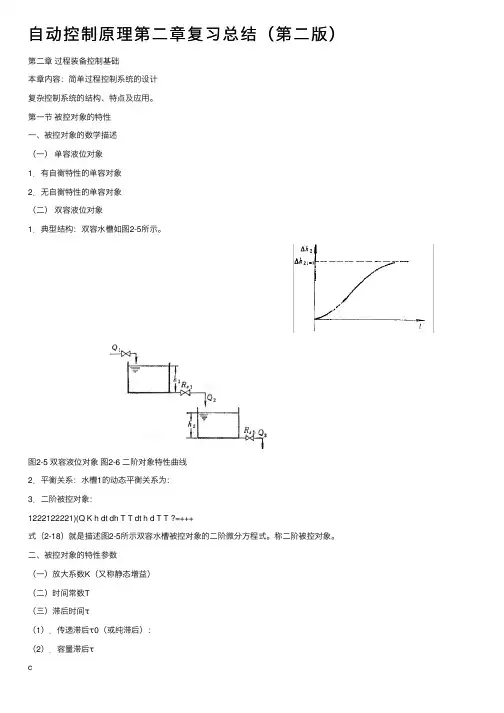
第⼀节被控对象的特性⼀、被控对象的数学描述(⼀)单容液位对象1.有⾃衡特性的单容对象2.⽆⾃衡特性的单容对象(⼆)双容液位对象1.典型结构:双容⽔槽如图2-5所⽰。
图2-5 双容液位对象图2-6 ⼆阶对象特性曲线2.平衡关系:⽔槽1的动态平衡关系为:3.⼆阶被控对象:1222122221)(Q K h dt dh T T dt h d T T ?=+++式(2-18)就是描述图2-5所⽰双容⽔槽被控对象的⼆阶微分⽅程式。
称⼆阶被控对象。
⼆、被控对象的特性参数(⼀)放⼤系数K(⼜称静态增益)(⼆)时间常数T(三)滞后时间τ(1).传递滞后τ0(或纯滞后):(2).容量滞后τc可知τ=τ0+τc。
三、对象特性的实验测定对象特性的求取⽅法通常有两种:1.数学⽅法2.实验测定法(⼀)响应曲线法:(⼆)脉冲响应法第⼆节单回路控制系统定义:(⼜称简单控制系统),是指由⼀个被控对象、⼀个检测元件及变送器、⼀个调节器和⼀个执⾏器所构成的闭合系统。
⼀、单回路控制系统的设计设计步骤:1.了解被控对象2.了解被控对象的动静态特性及⼯艺过程、设备等3.确定控制⽅案4.整定调节器的参数(⼀)被控变量的选择(⼆)操纵变量的选择(三)检测变送环节的影响(四)执⾏器的影响⼆、调节器的调节规律1.概念调节器的输出信号随输⼊信号变化的规律。
2.类型位式、⽐例、积分、微分。
(⼀)位式调节规律1.双位调节2.具有中间区的双位调节3.其他三位或更多位的调节。
(⼆)⽐例调节规律(P )1.⽐例放⼤倍数(K )2.⽐例度δ3.⽐例度对过渡过程的影响(如图2-24所⽰)4.调节作⽤⽐例调节能较为迅速地克服⼲扰的影响,使系统很快地稳定下来。
通常适⽤于⼲扰少扰动幅度⼩、符合变化不⼤、滞后较⼩或者控制精度要求不⾼的场合。
(三)⽐例积分调节规律(PI )1.积分调节规律(I )(1)概念:调节器输出信号的变化量与输⼊偏差的积分成正⽐==?t I t I dt t e T dt t e K t u 00)(1)()(式中:K I 为积分速度,T I 为积分时间。

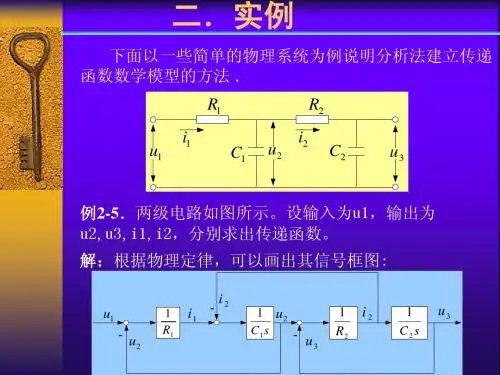
第 二 章2-3试证明图2-5(a)的电网络与(b)的机械系统有相同的数学模型。
分析 首先需要对两个不同的系统分别求解各自的微分表达式,然后两者进行对比,找出两者之间系数的对应关系。
对于电网络,在求微分方程时,关键就是将元件利用复阻抗表示,然后利用电压、电阻和电流之间的关系推导系统的传递函数,然后变换成微分方程的形式,对于机械系统,关键就是系统的力学分析,然后利用牛顿定律列出系统的方程,最后联立求微分方程。
证明:(a)根据复阻抗概念可得:2221212112212211212112212122111()1()111oiR u C s R R C C s R C R C R C s R u R R C C s R C R C R C C sR C s R C s+++++==+++++++即220012121122121212112222()()i i o id u du d u duR R C C R C R C R C u R R C C R C R C u dt dt dt dt++++=+++取A 、B 两点进行受力分析,可得:o 112()()()i o i o dx dx dx dx f K x x f dt dt dt dt -+-=- o 22()dx dxf K x dt dt -= 整理可得:2212111221121212211222()()o o i i o id x dx d x dx f f f K f K f K K K x f f f K f K K K x dt dt dt dt ++++=+++经比较可以看出,电网络(a )和机械系统(b )两者参数的相似关系为1112221211,,,K f R K f R C C2-5 设初始条件均为零,试用拉氏变换法求解下列微分方程式,并概略绘制x(t)曲线,指出各方程式的模态。
(1) ;)()(2t t x t x =+(2))。

自动控制原理第二版课后答案1. 介绍。
自动控制原理是现代自动化领域中的重要基础课程,它涉及到控制系统的设计、分析和应用,对于工程技术人员来说具有重要的意义。
本文档将针对自动控制原理第二版课后习题进行详细解答,帮助学习者更好地掌握课程内容。
2. 第一章。
2.1 课后习题1。
答,根据控制系统的基本结构,可以将其分为开环控制系统和闭环控制系统。
开环控制系统中,控制器的输出不受到被控对象的影响,而闭环控制系统中,控制器的输出受到被控对象的影响。
闭环控制系统具有更好的稳定性和鲁棒性,但也更加复杂。
2.2 课后习题2。
答,传递函数是描述控制系统输入和输出之间关系的数学模型,其形式为输出变量的拉普拉斯变换除以输入变量的拉普拉斯变换。
传递函数可以帮助我们分析控制系统的性能和稳定性,并进行控制器的设计。
3. 第二章。
3.1 课后习题1。
答,稳定性是控制系统设计中需要考虑的重要因素,它决定了系统在受到干扰或参数变化时的表现。
稳定性分析可以通过判据、根轨迹和频域等方法进行,其中判据法是最为直观和简单的方法,通过对系统的特征方程进行判别来判断系统的稳定性。
3.2 课后习题2。
答,根轨迹是一种描述控制系统特征方程根在复平面上运动规律的方法,它可以直观地反映系统的稳定性、过渡过程和静态误差等性能指标。
通过对根轨迹的分析,可以帮助我们设计合适的控制器来满足系统性能指标的要求。
4. 第三章。
4.1 课后习题1。
答,比例控制器是一种简单的控制器,它的输出与系统的误差成正比。
比例控制器可以改善系统的静态误差性能,但无法消除系统的稳定性问题和过渡过程中的振荡。
4.2 课后习题2。
答,积分控制器是一种消除系统静态误差的控制器,它的输出与系统的误差积分成正比。
积分控制器可以有效地消除系统的静态误差,但在实际应用中可能会导致系统的过度调节和振荡。
5. 总结。
通过对自动控制原理第二版课后习题的详细解答,我们可以更好地理解控制系统的基本原理和设计方法。

自动控制原理第二章课后习题答案(免费)离散系统作业注明:*为选做题2-1 试求下列函数的Z 变换 (1)()E z L =();n e t a = 解:01()[()]1k k k z E z L e t a z z z aa∞-=====--∑ (2) ();at e t e -= 解:12211()[()][]1...1atakT k aT aT aTaT k z E z L e t L ee z e z e z z e e z∞----------=====+++==--∑2-2 试求下列函数的终值:(1)112();(1)Tz E z z --=-解: 11111()(1)()1lim lim lim t z z Tz f t z E z z---→∞→→=-==∞- (2)2()(0.8)(0.1)z E z z z =--。
解:211(1)()(1)()0(0.8)(0.1)lim lim limt z z z z f t z E z z z →∞→→-=-==-- 2-3* 已知()(())E z L e t =,试证明下列关系成立:(1)[()][];n z L a e t E a =证明:0()()nn E z e nT z∞-==∑00()()()()[()]n n n n n n z z E e nT e nT a z L a e t a a ∞∞--=====∑∑ (2)()[()];dE z L te t TzT dz=-为采样周期。
证明:11100[()]()()()()()()()()()nn n n n n n n n n L te t nT e nT zTz ne nT z dE z de nT z dz dz e nT n zne nT z ∞∞---==∞-=∞∞----======-=-∑∑∑∑∑所以:()[()]dE z L te t Tzdz=- 2-4 试求下图闭环离散系统的脉冲传递函数()z Φ或输出z 变换()C z 。