7PLC指令系统讲解
- 格式:ppt
- 大小:1.69 MB
- 文档页数:41
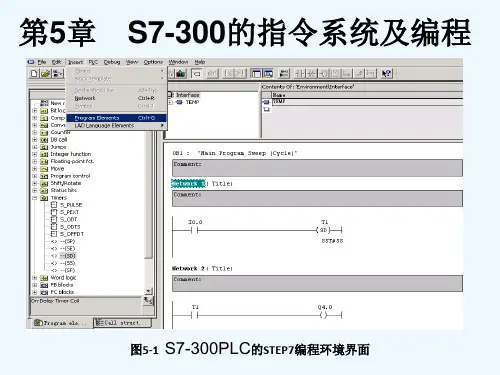
s7-300PLC编程语句手册汇总S7-300是一种可编程控制器,它有自己的编程语言和指令系统。
在使用S7-300进行编程时,需要了解其语言和指令系统的特点和用法。
S7-300的编程语言包括LAD(梯形图)、FBD(功能块图)和STL(结构化文本语言)。
其中,LAD是最常用的一种语言,它使用梯形图形式来表示程序的逻辑关系。
FBD则是一种图形化的编程语言,它使用不同的功能块来表示程序的逻辑关系。
STL则是一种类似于C语言的文本语言,它使用结构化的语法来表示程序的逻辑关系。
S7-300的指令系统包括基本指令和扩展指令。
基本指令包括逻辑指令、算术指令、移位指令等,用于实现程序的基本功能。
扩展指令则是在基本指令的基础上进行扩展,用于实现更加复杂的功能。
在使用S7-300进行编程时,需要根据具体的应用场景选择合适的编程语言和指令。
同时,还需要注意编程的规范和标准,以确保程序的可靠性和稳定性。
总之,S7-300的编程语言和指令系统是其核心功能之一,掌握其特点和用法对于进行编程工作非常重要。
在实际应用中,需要根据具体的需求和要求,选择合适的编程语言和指令,以实现程序的优化和效率提升。
STEP 7编程语言介绍STEP 7是一种用于编程可编程逻辑控制器(PLC)的工具。
它被广泛应用于自动化控制系统中,包括工厂自动化、机器人控制、物流自动化、建筑自动化等领域。
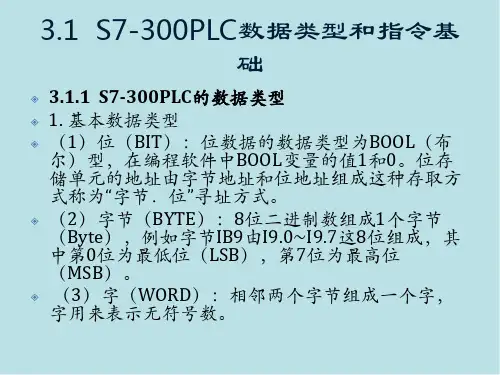
数据类型在STEP 7中,有多种数据类型可供使用,包括整型、浮点型、布尔型、字符型等。
这些数据类型可用于存储和处理不同类型的数据,以满足不同的应用需求。
参数数据类型在编写PLC程序时,需要指定参数的数据类型。
这些参数可以是输入、输出或内部数据。
参数的数据类型决定了它们可以存储的数据类型,以及它们可以执行的操作。
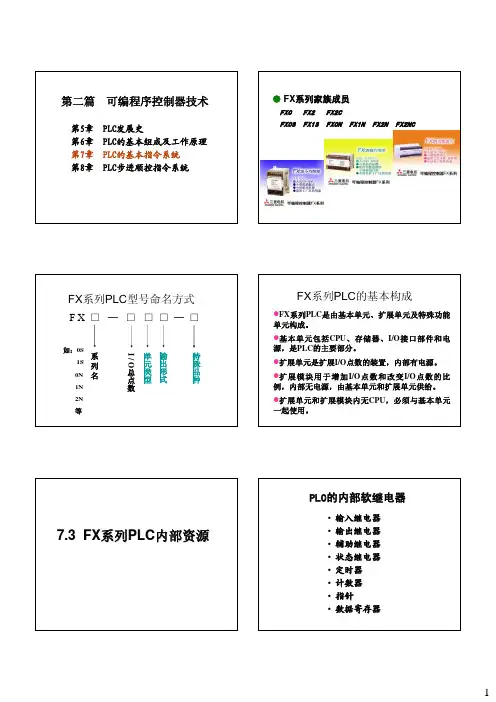
PLC用户存储区的分类及功能PLC用户存储区是用于存储程序和数据的区域。
它可以分为程序存储区和数据存储区。
程序存储区用于存储PLC程序,而数据存储区用于存储程序中使用的数据。

第4章s7-200系列PLC 基本指令及实训本章要点● 梯形图、语句表、顺序功能流程图、功能块图等常用设计语言的简介 ● 基本位操作指令的介绍、应用及实训● 定时器指令、计数器指令的介绍、应用及实训 ● 比较指令的介绍及应用● 程序控制类指令的介绍、应用及实训4.1 可编程控制器程序设计语言在可编程控制器中有多种程序设计语言,它们是梯形图、语句表、顺序功能流程图、功能块图等。
梯形图和语句表是基本程序设计语言,它通常由一系列指令组成,用这些指令可以完成大多数简单的控制功能,例如,代替继电器、计数器、计时器完成顺序控制和逻辑控制等,通过扩展或增强指令集,它们也能执行其它的基本操作。
供S7-200系列PLC 使用的STEP7-Micro/Win32编程软件支持SIMATIC 和IEC1131-3两种基本类型的指令集,SIMATIC 是PLC 专用的指令集,执行速度快,可使用梯形图、语句表、功能块图编程语言。
IEC1131-3是可编程控制器编程语言标准,IEC1131-3指令集中指令较少,只能使用梯形图和功能块图两种编程语言。
SIMATIC 指令集的某些指令不是IEC1131-3中的标准指令。
SIMATIC 指令和IEC1131-3中的标准指令系统并不兼容。
我们将重点介绍SIMATIC 指令。
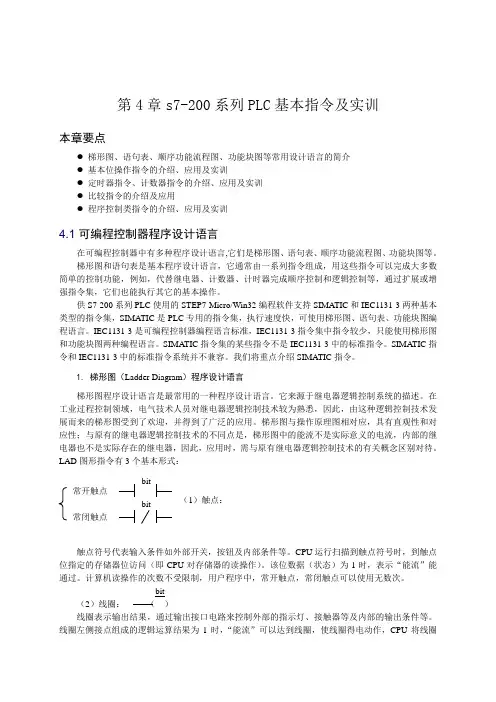
1. 梯形图(Ladder Diagram )程序设计语言梯形图程序设计语言是最常用的一种程序设计语言。
它来源于继电器逻辑控制系统的描述。
在工业过程控制领域,电气技术人员对继电器逻辑控制技术较为熟悉,因此,由这种逻辑控制技术发展而来的梯形图受到了欢迎,并得到了广泛的应用。
梯形图与操作原理图相对应,具有直观性和对应性;与原有的继电器逻辑控制技术的不同点是,梯形图中的能流不是实际意义的电流,内部的继电器也不是实际存在的继电器,因此,应用时,需与原有继电器逻辑控制技术的有关概念区别对待。
LAD 图形指令有3个基本形式:(1)触点:触点符号代表输入条件如外部开关,按钮及内部条件等。
S7-200Smart运动控制指令讲解S7-200Smart是西门子的一款小型PLC,价格便宜,功能强大,从而爱到大家的喜爱,今天给大家讲解一下运动控制方面的设置,直接上干货:PS:小编这里用的软件版本为2.4一、运动控制向导设置如下1、在运动控制向导中打开运动控制设置界面2、选择要组态的轴,这里选择轴0,点击下一步3、轴命名为轴0,点击下一步4、测量系统设置,分别为选择测量系统:工程单位电机每转脉冲数:800(步进电机细分设置)测量单位:mm电机转动一圈进给(丝杠螺距):5.05、方向控制,这里是源型输出6、正向极限LMT+(非必选)7、反向极限LMT-(非必选)8、原点信号RPS(原点回归用)9、零点信号ZP,用伺服电机时选择这个,用步进电机时关闭此功能10、停止信号STP11、曲线中停止信号(非必选)12、使能输出13、启动速度14、点动速度15、加减速时间16、急停时间17、反冲补偿18、参考点功能(回原点用,必选)19、原点回归速度及方向设置20、偏移量设置21、原点回归方式设置,其中3、4项需要ZP点,需伺服电机用,这里我们选122、读取位置,需配合西门子伺服用,不选23、曲线,这里可以添加自定义的运动轨迹24、存储区为系统存储上面参数的地址,注意不要和其它地址冲突,这里选择VD1000开始25、自动生成的了函数,可以根据需要进行选择,这里全选26、IO映设表,前面选择的IO点27、最后一页,选择完成二、设置完成后,了例程中出现如下例程,这里就可以直接调用了。
三、刚才生成的子例程的功能如下,我们逐一进行讲解1、AXISx_CTRL 子例程(控制)启用和初始化运动轴,方法是自动命令运动轴每次 CPU 更改为 RUN 模式时加载组态/曲线表。
在您的项目中只对每条运动轴使用此子例程一次,并确保程序会在每次扫描时调用此子例程。
使用SM0.0(始终开启)作为EN 参数的输入。
2、AXISx_MAN 子例程(手动模式)将运动轴置为手动模式。