汽车防追尾控制系统毕业设计(论文)
- 格式:doc
- 大小:1.67 MB
- 文档页数:58
汽车倒车防撞系统摘要汽车作为现代社会最主要的交通工具,数量越来越多,但是交通事故的发生频率逐年增长,其中因倒车发生的事故占很大的比例。
随着科技的发展,这类的问题得到了解决,人类发明了智能交通系统,其中汽车智能倒车防撞技术关键在于智能实时的测出汽车与障碍物的距离。
当汽车与障碍物之间的距离小于设定的安全距离时,防撞系统就自动报警并采取制动措施。
为提高汽车运行的安全性和降低碰撞发生的可能,本文讲述一种主动型汽车倒车防撞报警系统。
利用超声波进行无接触的测距,系统主要包括超声波发射电路,超声波接收电路,温度测量电路,数码显示电路以及报警电路。
以超声波传感器为重点进行超声波的发射和接收,通过计算得出距离并通过LED显示,在超出一定距离时,电铃报警,驾驶员做出判断。
针对系统的功能,对控制软件进行设计。
根据验证。
满足倒车安全的要求。
关键词:超声波,倒车,防撞,测距目录第一章汽车防撞系统的研究前提 (4)1.1汽车防撞系统的背景及现状 (4)1.1.1汽车防撞系统的背景 (4)1.1.2研究的目的和意义 (5)1.1.3防撞系统的现状 (6)第二章超声波测距 (8)2.1关于超声波 (8)2.1.1 超声波的介绍 (8)2.1.2 超声波的特点 (8)2.2 超声波传感器 (9)2.3超声波测距原理及提高性能的措施 (10)2.3.1超声波测距原理 (10)2.3.2 提高超声波测距系统性能的若干措施 (12)第三章系统的组成 (13)3.1硬件部分 (13)3.2单片机的选择 (13)3.3温度传感器的选择 (15)3.4 超声波传感器的选择 (17)3.5 系统总体设计思路 (18)第四章硬件电路设计 (19)4.1 超声波发射电路 (19)4.2 超声波接收电路 (20)4.3 显示电路与报警电路的设计 (21)4.3.1显示电路的设计 (21)4.3.2报警电路的设计 (22)4.4 电源设计 (23)第五章系统程序设定 (24)5.2 主程序 (24)5.3 温度测量与测距子程序 (29)5.4 距离显示,判断以及报警子程序 (30)第六章误差分析与整改方案 (33)6.1超声波测距误差分析 (33)6.2针对误差产生原因的系统改进方案 (36)结束语 (37)致谢 (38)参考文献 (40)第一章汽车防撞系统的研究前提1.1汽车防撞系统的背景及现状1.1.1汽车防撞系统的背景国际上先进国家自80年代末开始研究汽车防撞系统。
汽车智能防追尾控制系统设计汽车智能防追尾控制系统设计摘要:本文详细介绍了一种汽车智能防追尾控制系统的设计,该系统可检测与跟踪前方车辆,提前预警驾驶员并自动刹车避免追尾事故的发生。
本文介绍了该系统的硬件设计和软件实现,以及系统测试结果,该系统能够可靠地保护驾车安全。
一、问题陈述近年来,高速公路上发生的追尾事故时有发生,由于司机的疏忽或者驾驶技术不熟练,往往导致严重后果。
因此,如何提高车辆驾驶的安全性成为汽车行业的一大难题。
针对这一问题,我们设计了一种汽车智能防追尾控制系统,该系统可以自动检测和跟踪前方车辆,向驾驶员发出预警并自动刹车避免追尾事故的发生。
二、设计原理本系统主要包括三个部分,分别是前方障碍物检测、车速检测和制动控制。
其中,前方障碍物检测模块通过雷达和摄像头实现,可以实时扫描前方车辆的距离、速度和方向,对异常情况进行判断。
车速检测模块通过车速传感器实现,可以实时检测车速。
制动控制模块通过控制车辆制动系统实现,可以实现自动刹车。
当前方障碍物检测模块发现前方车辆距离过近,或车速检测模块检测到自身车速过快,系统将向驾驶员发出预警信号;如果前方车辆已经停止或自身车速已经减慢,系统将自动刹车避免追尾事故的发生。
系统整体框架如下图所示:三、硬件设计本系统的硬件设计主要包括微处理器、雷达传感器、摄像头、车速传感器、制动系统等部件。
其中,微处理器采用STM32F407芯片,雷达传感器采用HC-SR04型号,摄像头采用OV7670型号,车速传感器采用SS441A型号。
具体的硬件设计实现流程如下:1.搭建硬件平台,连接各个模块。
2.安装雷达传感器和摄像头并进行相应的校准工作。
3.连接车速传感器,采集车速信息。
4.连接到车辆制动系统,控制自动刹车。
四、软件实现本系统的软件实现主要涉及到距离测量、速度测量、刹车控制等算法的设计和开发。
其中,前方障碍物检测模块和车速检测模块使用C/C++编写,制动控制模块使用通用汽车控制系统(CAN)总线进行数据交换。
基于单片机的汽车防追尾碰撞报警系统设计目录摘要.................................................................................................II 一.引言 . (1)(一)社会背景及意义 (1)(二)国内外研究现状 (1)(三)设计思路 (1)(四)论文组织结构 (3)二.系统关键技术分析 (3)(一)模数转换技术 (3)1. 模数转换模块(ADC) (3)2. ADC工作原理 (4)3. ADC采样时间和转换时间 (5)(二)寻迹导航技术 (8)(三)红外检测技术 (9)(四)脉宽调制技术 (10)三.系统架构设计 (11)(一)系统功能结构设计 (11)(二)各模块功能分析 (12)四.系统硬件电路设计 (14)(一)稳压电源电路设计 (14)(二)模拟光电传感器电路设计 (15)(三)红外避障传感器控制电路设计 (17)(四)声光指示电路设计 (19)(五)电机驱动电路设计 (19)五.系统测试 (21)(一)系统测试工具 (21)(二)测试结果与分析 (23)结束语 (25)参考文献 (27)致谢 (29)摘要随着人们生活水平的日益提高,汽车数量也与日俱增,因此汽车的行驶安全就显得尤为重要。
介绍一种基于单片机Fusion FPGA AFS600芯片的汽车防追尾碰撞报警系统,他是自动检测行进中汽车前后方障碍物的距离,当达到安全极限距离时,会发出声光报警,提示驾驶员进行相应的操作。
给出该报警系统的软硬件设计,实践证明该系统有效且准确。
为提高汽车运行的安全性和降低碰撞发生的可能,本文讲述一种主动型汽车防追尾碰撞报警系统。
该系统装置将单片机的实时控制及数据处理功能,与毫米波雷达的测距技术、传感器技术相结合,可检测汽车运行中前方、后方障碍物与汽车的距离及汽车车速,通过数显装置显示距离,并由发声电路根据距离远近情况发出警告声。
汽车防追尾和防侧撞安全系统设计汽车防追尾和防侧撞安全系统设计汽车是现代社会人们出行的重要工具,但是在汽车行驶过程中,由于各种原因,如速度不当、距离不够、驾驶员疲劳等,易发生追尾、侧撞等事故,严重威胁驾乘人员生命安全。
为此,车辆防追尾和防侧撞安全系统的研发与推广具有重要意义。
本文就此展开探讨,设计一种汽车防追尾和防侧撞安全系统。
一、系统原理汽车防追尾和防侧撞安全系统由车辆上的多个传感器组成,包括雷达、摄像头和红外线等设备,这些设备通过计算机系统形成了一个控制单元。
当车辆前方出现障碍物,传感器就会向控制单元发出信号,控制单元会像驾驶员发出警告信号,警告驾驶员有障碍物。
如果驾驶员没有采取任何行动,控制单元会自动采取措施,如制动等,避免发生碰撞,从而保障驾驶员的安全。
二、系统特点1.预警及时该系统具有高灵敏度,能够及时发现障碍物,为驾驶员提供预警信息,尽早提醒驾驶员注意安全行车。
2.制动迅速当车辆前方出现障碍物时,控制单元会迅速采取措施如制动等,以避免发生碰撞。
3.适应性强该系统能够适应各种车型、环境和天气,具备很强的适应性。
4.运行稳定该系统使用先进的传感器和控制单元技术,具备非常稳定的运行性能,系统运行过程中不会出现任何问题,可靠性较高。
三、系统设计系统由三大部分组成:前端传感器、控制单元和驾驶员提示器。
前端传感器包括多个雷达、摄像头和红外线传感器等设备,放置在车辆的前部区域,用于检测前方障碍物信息。
当检测到障碍物信息时,前端传感器会向控制单元发送信号,控制单元会根据障碍物的距离、速度等信息,进行数据处理和预警。
控制单元是系统中的核心部分,接收前端传感器发出的信号,并根据预设的算法进行相应预警和判断,如果判断存在危险,系统会向驾驶员提示,同时启动制动系统,以避免发生碰撞。
驾驶员提示器一般为声音警告器和LCD显示屏,声音警告器会通过语音提示驾驶员,提示障碍物的位置、距离、速度等信息,LCD显示屏则可以显示具体的障碍物信息。
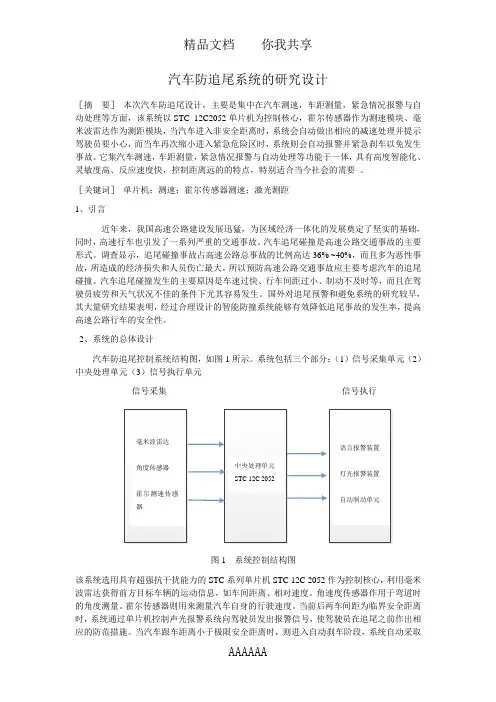
汽车防追尾系统的研究设计[摘要]本次汽车防追尾设计,主要是集中在汽车测速,车距测量,紧急情况报警与自动处理等方面,该系统以STC 12C2052单片机为控制核心,霍尔传感器作为测速模块、毫米波雷达作为测距模块,当汽车进入非安全距离时,系统会自动做出相应的减速处理并提示驾驶员要小心,而当车再次缩小进入紧急危险区时,系统则会自动报警并紧急刹车以免发生事故。
它集汽车测速,车距测量,紧急情况报警与自动处理等功能于一体,具有高度智能化、灵敏度高、反应速度快,控制距离远的的特点,特别适合当今社会的需要。
[关键词]单片机;测速;霍尔传感器测速;激光测距1、引言近年来,我国高速公路建设发展迅猛,为区域经济一体化的发展奠定了坚实的基础,同时,高速行车也引发了一系列严重的交通事故。
汽车追尾碰撞是高速公路交通事故的主要形式。
调查显示,追尾碰撞事故占高速公路总事故的比例高达36% ~40%,而且多为恶性事故,所造成的经济损失和人员伤亡最大。
所以预防高速公路交通事故应主要考虑汽车的追尾碰撞。
汽车追尾碰撞发生的主要原因是车速过快、行车间距过小、制动不及时等,而且在驾驶员疲劳和天气状况不佳的条件下尤其容易发生。
国外对追尾预警和避免系统的研究较早,其大量研究结果表明,经过合理设计的智能防撞系统能够有效降低追尾事故的发生率,提高高速公路行车的安全性。
2、系统的总体设计汽车防追尾控制系统结构图,如图1所示。
系统包括三个部分:(1)信号采集单元(2)中央处理单元(3)信号执行单元信号采集信号执行图1 系统控制结构图该系统选用具有超强抗干扰能力的STC系列单片机STC 12C 2052作为控制核心,利用毫米波雷达获得前方目标车辆的运动信息,如车间距离、相对速度。
角速度传感器作用于弯道时的角度测量。
霍尔传感器则用来测量汽车自身的行驶速度。
当前后两车间距为临界安全距离时,系统通过单片机控制声光报警系统向驾驶员发出报警信号,使驾驶员在追尾之前作出相应的防范措施。
哈尔滨应用职业技术学院毕业设计(论文)摘要汽车追尾在交通事故中占到30%-40%,为了减少交通事故和人员伤亡,研究和推广汽车防撞系统日益显得重要和迫切。
自动发现可能与汽车发生碰撞的车辆、行人、或其他障碍物体,发出警报或同时采取制动或规避等措施。
人们主要把精力集中于汽车被动安全性方面,例如,在汽车的前部或后部安装保险杠、在汽车外壳四周安装弹性材料、在车内安装安全带及安全气囊等等,以减轻汽车碰撞带来的危害。
而发展汽车防撞技术,对提高汽车智能化水平有重要意义。
防撞装置是借助于遥测技术监视汽车前方的车辆、障碍物。
理论上,汽车防撞装置可在任何天气、任何车速状态下探测出将要发生的危险情况并及时提醒司机及早采取措施或自动紧急制动,避免严重事故发生,这里应该指出,汽车安全如今越来越成为一个必须综合考量的问题,无论主动还是被动安全系统,都有互相结合的趋势。
专家们提醒,除了汽车本身以外,如果没有良好的驾驶习惯,乘员也是不安全的,甚至反而会使安全配备无法发挥其应有作用。
如驾乘不系安全带,酒后驾车,超速行驶等,如果发生险情与车辆的安全性是没有关系的。
所以安全意识才是汽车行驶安全的关键!关键词:汽车追尾防撞装置安全气囊安全性AbstractAutomobile rear end up 30%-40% in the traffic accident, in order to reduce traffic accidents and casualties, research and promotion of automobile collision avoidance system is increasingly important and urgent. Automatic discovery of possible objects and collision of vehicles, pedestrians, vehicles or other obstacles, alarm or at the same time take braking or circumvention measures. People mainly focus on automobile passive safety, for example, in the front of the car mounted on the rear bumper, or in the car shell installed around the elastic material, installation of seat belts and airbags in cars and so on, in order to reduce automobile collisions bring harm. While the development of automotive anti-collision technology, have important significance to improve the level of intelligent vehicle. Anti-collision device is the vehicle, obstacle by telemetry monitoring the front of the automobile. In theory, automobile anti-collision device can be in any weather, at any speed test measure will happen in a dangerous situation and timely to remind the driver to take measures or automatic emergency brake as soon as possible, to avoid serious accidents, it should be noted, automobile safety now has become a must consider the question, whether active or passive safety system, have the combination of trend. Experts reminded, in addition to the car itself, if there is no good driving habits, the crew is not secure, even it will make the safety equipment can not play its due role. Such as driving without a seat belt, drunk driving, speeding, if the safety accident occurs and the vehicle is it doesn't matter. So the safety awareness is the key to vehicle safety!Keywords: rear-end collision anticollision device air bag safety目录摘要 (I)Abstract (II)目录 (III)绪论 (V)第1章构成原理作用 (6)1.1 构成 (6)1.1.1 信号采集系统 (6)1.1.2 数据处理系统 (6)1.1.3 执行机构 (6)1.2 工作原理 (7)1.2.1 跟踪识别 (7)1.2.2 智能处理 (7)1.2.3 报警提醒 (8)1.2.4减速刹车 (8)1.3 作用 (8)1.4 模式 (8)第2章国外研发 (10)2.1 戴姆勒.克莱斯勒公司研发情况 (10)2.2 沃尔沃公司研发情况 (10)第3章国内研发 (11)3.1 泰远汽车自动防撞器技术介绍 (11)3.2 研发历程 (12)第4章汽车自动防撞器的安装 (14)第5章汽车防撞系统的现状及前景 (15)5.1 发展现状 (15)5.2 发展前景 (15)第6章汽车防撞系统的性能 (17)6.1 探测距离 (17)6.2 制动性能 (17)6.3 自动防撞前方障碍物的性能 (17)6.6 开启和关闭性能 (17)第7章防碰撞预警 (18)结论 (19)致谢 (20)参考文献 (21)绪论汽车自动防撞系统(automatic bump-shielded system of the automobile),是智能轿车的一部分。

中北大学
毕业设计任务书
学院:信息与通信工程学院
专业:通信工程
学生姓名:吴文波学号:1305024151设计(论文)题目:汽车防追尾安全报警系统设计
起迄日期: 2017年2月13日~2017年 6月13日设计(论文)地点:
指导教师:郑志华
负责人:姚爱琴
发任务书日期: 2017年2月13日
毕业设计任务书
电路的设计;
(5)完成对系统的软件设计,包括程序
设计方案和功能说明。
3)翻译英文原稿一篇
4)开题报告和毕业设计说明书应按教务
处的有关规定书写和编辑(查教务处网
页)。
图1.4 LED显示模块
图1.1控制模块
图1.2超声波发射模块图1.3超声波接收模块
毕业设计任务书。
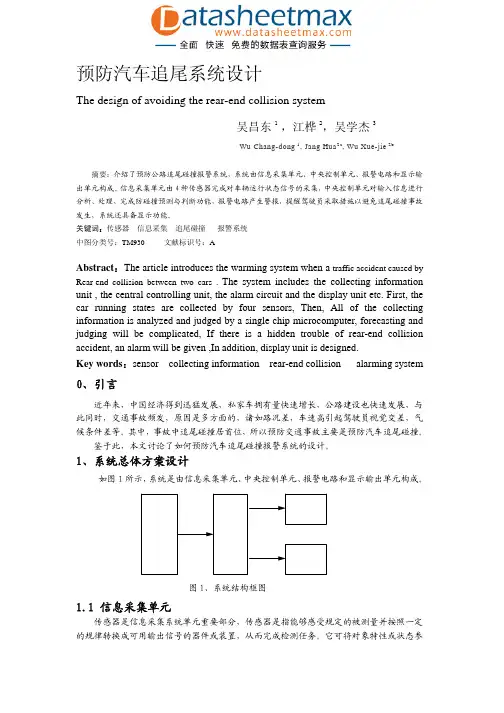
预防汽车追尾系统设计The design of avoiding the rear-end collision system吴昌东1,江桦2,吴学杰 3Wu Chang-dong 1, Jang Hua2a, Wu Xue-jie 2b摘要:介绍了预防公路追尾碰撞报警系统,系统由信息采集单元、中央控制单元、报警电路和显示输出单元构成。
信息采集单元由4种传感器完成对车辆运行状态信号的采集,中央控制单元对输入信息进行分析、处理,完成防碰撞预测与判断功能,报警电路产生警报,提醒驾驶员采取措施以避免追尾碰撞事故发生,系统还具备显示功能。
关键词:传感器信息采集追尾碰撞报警系统中图分类号:TM930 文献标识号:AAbstract:The article introduces the warming system when a traffic accident caused by Rear-end collision between two cars . The system includes the collecting information unit , the central controlling unit, the alarm circuit and the display unit etc. First, the car running states are collected by four sensors, Then, All of the collecting information is analyzed and judged by a single chip microcomputer, forecasting and judging will be complicated, If there is a hidden trouble of rear-end collision accident, an alarm will be given ,In addition, display unit is designed.Key words:sensor collecting information rear-end collision alarming system 0、引言近年来,中国经济得到迅猛发展,私家车拥有量快速增长,公路建设也快速发展,与此同时,交通事故频发,原因是多方面的,诸如路况差,车速高引起驾驶员视觉变差,气候条件差等。
齐齐哈尔大学毕业设计(论文)题目基于ARM的防汽车追尾碰撞报警系统的设计学院通信与电子工程学院专业班级通信工程092班2013年6月17号摘要随着我国人民生活质量的的提高以及汽车工业的发展,汽车似乎已经融入每个百姓的家庭中,当然,事物都有双面性,于此同时发生了好多交通事故,其中追尾事故是最严重的,本文介绍了关于ARM嵌入式微控制器的性能和特点,设计了以其为核心技术的一种低成本、高精确度、微型化、数字显示的汽车防碰撞追尾报警器。
该防撞报警器将ARM嵌入式控制器的实时控制及数据处理功能与传感器技术相结合,系统主要由处理器、控制电路、传感器组、存储器、摄像头、显示屏组成。
超声波可检测汽车运行中后方障碍物与汽车的距离,传送给处理器,存储器存储视频数据然后通过显示屏装置显示后方的实时路况,并由发声电路根据距离远近情况发出警告声。
该设计提高了汽车的安全性能,对汽车倒车追尾事故的预防具有重要的意义。
关键词:ARM嵌入式控制器;追尾;防撞AbstractWith the improvement of people's life quality and the development of auto indust ry, cars have been integrated into each peoples’family,of course, everyth ing has a doub le side, a lot of traffic accident happened at the same time,rear-end collision is one of the most serious problems among them.This paper introduces the properties and cha racteristics of ARM embedded microcontroller controller,then use it as the core techn ology to designed a low cost, high precision, miniaturization, digital display car collis ion alarm system.The anti-collision alarm combine the ARM embedded controller real-t ime control and data processing function to sensor technology,system is mainly compo sed of a processor and a control circuit, sensor group, memory, camera , display scree n.Ultrasonic can detection the distance between movement of the car and roadblock,tra nsmitted to the processor,storage store video data,then display the real-time traffic behi nd through the display screen,and sound circuit raise the alarm according to the distan ce.The design improve the safety performance of the car,and it is of great significance to prevent car reversing collision.Keywords:The ARM embedded microcontroller controller; Collision; Collision avoidanc e目录摘要 (I)Abstract .............................................................................................................................. I I第1章绪论 (1)1.1 研究背景 (1)1.2 研究意义 (1)1.3 研究的现状 (2)第2章系统的总体设计 (3)2.1 系统设计思想和目标 (3)2.2 总体方案 (3)2.3 CMOS图像传感器的分类 (4)2.4 CMOS图像传感器工作原理 (5)2.5 视频的采集方案 (5)2.6 视频处理芯片的分析 (6)2.7 视频的压缩与传输方案 (6)2.8 超声波测距方案 (7)第3章防汽车追尾碰撞系统硬件设计 (8)3.1 硬件系统的构成 (8)3.2 STM32F103RCT6主控系统硬件设计 (8)3.2.1 最小微控制器系统设计 (9)3.2.2 石英晶振电路的设计 (9)3.2.3 复位电路的设计 (10)3.2.4 电源电路的设计 (10)3.2.5 调试电路的设计 (11)3.2.6 启动配置电路电路的设计 (12)3.3 摄像头信号采集的设计 (12)3.4 视频传输电路的设计 (13)3.6 超声波电路的设计 (14)第4 章防汽车追尾碰撞系统软件设计 (17)4.1 程序设计流程图 (17)4.2 KELL软件的介绍 (17)4.3 图像采集与处理 (18)4.3.1 摄像头的驱动 (18)4.3.2 图像采集 (20)4.4 视频显示系统 (22)第5章系统的调试及误差分析 (23)5.1 系统的硬件调试 (23)5.2 系统的软件调试 (24)5.3 系统的误差分析 (25)结论 (30)参考文献 (1)附录1 (2)附录2 (3)附录3 (4)致谢 (21)第1章绪论1.1 研究背景目前我国公路的总长度已经是世界第二,其带来了庞大的经济利益和国家之间的贸易。
车辆追尾事故预警系统设计在现代社会中,车辆追尾事故时有发生,给人们的生命财产安全带来了严重威胁。
为了减少这类事故的发生,提高道路交通的安全性,设计一个有效的车辆追尾事故预警系统显得非常重要。
首先,车辆追尾事故预警系统应该具备实时监测功能。
通过安装在车辆上的传感器,可以实时监测车辆周围的交通状况,包括前方车辆的速度、距离和行驶方向等信息。
当系统检测到与前车距离过近或者速度差异较大时,应该立即发出警报,提醒驾驶员注意保持安全距离或减速行驶,以避免追尾事故发生。
其次,车辆追尾事故预警系统还应该具备数据分析和预测功能。
系统需要对历史交通数据进行分析,识别出造成追尾事故的常见原因和规律,以便提前预警驾驶员可能发生事故的情况。
同时,系统还可以通过机器学习等技术,根据当前交通情况和环境变化来预测未来可能发生追尾事故的概率,及时采取措施避免事故发生。
另外,车辆追尾事故预警系统还应该具备自动应急处理功能。
当系统判断发生追尾事故的可能性较大时,可以自动启动紧急制动系统或者向后方车辆发送警告信号,以减缓碰撞速度或者提醒后车及时减速避让,从而最大程度地减少事故伤害。
除了以上功能,车辆追尾事故预警系统还应该具备高可靠性和稳定性。
系统需要经过严格的测试和验证,确保在各种复杂道路和气候条件下都能正常工作。
同时,系统还需要与车辆其他系统进行有效的集成,确保信息传输的准确性和及时性,以保障预警系统的可靠性。
总之,设计一套高效的车辆追尾事故预警系统对提高道路交通安全性具有重要意义。
通过实时监测、数据分析、预测功能和自动应急处理等多种手段的整合,可以有效地预防和减少车辆追尾事故的发生,保障驾驶员和乘客的生命安全,促进道路交通的顺畅和畅通。
希望在未来的交通安全设施中,车辆追尾事故预警系统能够发挥更大的作用,为人们的出行提供更加安全可靠的保障。
河南科技学院2011届本科毕业论文(设计)论文题目:汽车防撞系统——自动控制系统的设计学生姓名:***所在院系:机电学院所学专业:电气工程及其自动化导师姓名:杨天明完成时间:2011年5 月27 日摘要本设计分析了汽车防撞系统的基本设计原理以及目前国内外此类防撞系统存在的问题。
并详细的介绍超声波测距系统。
它能自动检测车与障碍物的距离,当汽车行驶前方出现障碍物并对本车行使安全构成威胁时,汽车自动防撞器能实施自动报警、自动减速、自动制动,最终使汽车与障碍物避免相撞。
本设计的防撞装置在结构上采用微电脑技术和专用芯片设计,具有结构简单,小型化的特点,非常适合用于测控系统:在软件设计上,突出模块的灵活性,并且AT89C51语言简洁,大大简化了编写程序的工作量。
比较在市场上已有的汽车防撞器,该系统结构紧凑,成本低,可靠性好,通信能力强,能有效地避免汽车相撞事故的发生,具有一定的市场价值。
本系统着重自动控制系统的设计。
关键词:防撞系统,超声波,单片机,自动控制AbstractThis design analyzes the basic design principle of the automotive anti-collision system and the problem of such anti-collision system at home and abroad. Itintroduces the system of ultrasonic ranging in detail It can inspeet automatically the distance which is between the car and the obstades.when it appear some obstades in the head of the going vehicle and threats the secare of this vehicle,the device of the automatic anti-collision can carry out the automatic alarm,automatic deceleration,automatic brake,and avoid the vehide colliding the obstades.In the structure,this design’s anti-collision device empolies microcomputer technologu and special chip design.The design has the characteristics of simple structures and miniaturization and is suitable for observation and controling systen.In the software design,this design protudes the module’s flexibility and AT89C51 language is concise.So the programming workload is greatly simplified. Compared with the already automotive anti-collision,this device has compact structure,low cost,good reliability and communication ability.And it can avoid effectively the of the car collision.It has certain market value.This system focuses on the design of the automatic control system.Key words:Anti-collision system,Ultrasoud, Microcontroller,Automatic contro目录1绪论 (1)1.1汽车防撞系统的现状及前景 (1)1.2本文主要研究内容 (2)2 汽车防撞系统的设计构想 (2)2.1汽车防撞系统的结构与性能 (2)2.1.1 汽车防撞系统的构成 (2)2.1.2 汽车防撞系统的性能 (3)2.2智能汽车防撞报警系统设计 (3)2.3系统结构与检测距离工作原理 (4)2.4超声波测距 (5)2.4.1 超声波传感器原理 (5)3 控制系统硬件设计 (6)3.1控制系统方框图 (6)3.2AT89C51介绍 (6)3.2.1 AT89C51主要特性 (7)3.2.2 AT89C51管脚说明 (7)3.2.3 AT89C51振荡器特性 (9)3.2.4 AT89C51芯片擦除 (9)3.3系统硬件的设计 (13)3.3.1 超声波的工作原理 (13)3.3 .2 超声波发射部分的设计 (14)3.3.3 超声波两路接收电路部分 (14)3.3.4 测温电路部分 (15)3.3.5 控制、超声波发送、显示、报警电路部分 (17)4 控制软件系统的设计 (17)4.1主程序流程图 (17)4.2软件执行的工作过程 (17)5 总体控制系统电路 (19)6 结束语 (19)致谢 (19)参考文献 (20)附录1汽车防撞系统总图1 (22)附录2汽车防撞系统总图2 (23)1绪论随着我国社会经济近年来不断发展,公路交通呈现出行驶高速化、车流密集化和驾驶员非职业化的趋势。
单片机汽车防追尾系统基于单片机的汽车防追尾碰撞报警系统设计目录摘要 (II)一.引言 (1)(一)社会背景及意义 (1)(二)国内外研究现状 (1)(三)设计思路 (1)(四)论文组织结构 (3)二.系统关键技术分析 (3)(一)模数转换技术 (3)1. 模数转换模块(ADC) (3)2. ADC工作原理 (4)3. ADC采样时间和转换时间 (5)(二)寻迹导航技术 (8)(三)红外检测技术 (9)(四)脉宽调制技术 (10)三.系统架构设计 (11)(一)系统功能结构设计 (11)(二)各模块功能分析 (12)四.系统硬件电路设计 (14)(一)稳压电源电路设计 (14)(二)模拟光电传感器电路设计 (15)(三)红外避障传感器控制电路设计 (17)(四)声光指示电路设计 (19)(五)电机驱动电路设计 (19)五.系统测试 (21)(一)系统测试工具 (21)(二)测试结果与分析 (23)结束语 (25)参考文献 (27)致谢 (29)摘要随着人们生活水平的日益提高,汽车数量也与日俱增,因此汽车的行驶安全就显得尤为重要。
介绍一种基于单片机Fusion FPGA AFS600芯片的汽车防追尾碰撞报警系统,他是自动检测行进中汽车前后方障碍物的距离,当达到安全极限距离时,会发出声光报警,提示驾驶员进行相应的操作。
给出该报警系统的软硬件设计,实践证明该系统有效且准确。
为提高汽车运行的安全性和降低碰撞发生的可能,本文讲述一种主动型汽车防追尾碰撞报警系统。
该系统装置将单片机的实时控制及数据处理功能,与毫米波雷达的测距技术、传感器技术相结合,可检测汽车运行中前方、后方障碍物与汽车的距离及汽车车速,通过数显装置显示距离,并由发声电路根据距离远近情况发出警告声。
关键词:单片机;碰撞;报警;检测AbstractWith rising of living stangard,the number of cars increased every day,so cars driving safety is particularly important. The system of automobile anti-collision alarming system based on single Fusion FPGA AFS600-chip is introduced,it ca n auto detect distance frontage an rear fraise,when reach critical security distance,alarming of sound an light are given,the system hardware composition anf software project are showed,Experiment results prove validity and veracity.In order to enhance th e safety of cars and reduce the possibility of a collision, the paper about a pro-active anti-vehicle collision warning system. The system will be installed real-time control of the microcontroller and data processing functions, and millimeter-wave radar ranging technology, sensor technology, could be detected in the vehicle running in front, the rear vehicle barriers and the distance and vehicle speed, through the significant number of Device shows that distance by distance voice circuits based on the situ ation issued a warning sound.Keywords:single chip computer; collision; alarming;detection一引言(一)社会背景及意义为有效降低小汽车碰撞事故的高发率,近年来广大电子爱好者始终都在试图通过制作模型的方式,努力探寻解决该问题的可行方案,而模型制作所需的硬件基础尤其成为解决问题的关键。
新型汽车追尾防伤害系统摘要:汽车驻车时发生严重追尾事故时对车辆人员伤害较大,而现在几乎没有针对汽车驻车时发生追尾事故减少人员伤害的安全系统,我们根据相关理论知识设计了一款新型汽车追尾放伤害系统,其根本是利用传感器、ECU、制动压力调节器等,在发生碰撞时或即将发生碰撞时改变车辆状态,使其由静止变为运动,以此来减少人员所受到的伤害或避免事故发生。
基金项目:2021年度大学生创新创业训练计划资助(项目编号:202110144015)一、方案背景:随着汽车工业发展,私家车成为了家庭必需品。
在行车途中,难免发生交通事故,车祸伤亡占意外事故的大部分。
其中,追尾事故时长发生。
目前大部分研究的是汽车主动防碰撞系统,旨在碰撞未发生前将其扼杀在摇篮里,大部分的防碰撞系统他们的覆盖范围都是一个扇形有盲点区域还有在遇到以下路障等情况下汽车很可能会出现无法行使的状况,还有一些防碰撞系统虽然可以弥补这几个缺点但是造价太高。
因此像对于碰撞无法避免的情况下,减少乘车人员所受伤害方面的研究较少.我们所提出的“新型汽车追尾防伤害系统”则在此方面有一定的前瞻性。
不仅大幅度降低了制造成本而且很多情况下可以避免驾驶人员收到较重的伤害。
二、方案原理:该系统通过改变追尾之后的车辆的状态,汽车在被追尾时一部分的能量转化为汽车的速度,通过这样的方式才化解追尾所产生的的很大一部分能量,这样就可以极大地减少汽车追尾造成的伤害,提高交通安全性,有效降低乘员在事故中的受损情况。
三、方案设计:新型汽车追尾防伤害系统由检测系统和控制系统组成。
检测系统:该系统由安装在汽车后防撞刚梁上的多个碰撞传感器和ECU控制单元组成。
碰撞检测是整个新型汽车追尾防伤害系统的初步工作也是最重要的工作,它是信号输入装置。
碰撞检测系统是为了检测到其他交通参与者与该车辆发生较严重的追尾事故。
若后车与其发生较小的追尾事故,碰撞传感器感应到碰撞,该碰撞使碰撞传感受到的压力小于19000N,将会将相应强度的信号发送给ECU,ECU进行判断,信号强度小将不会把信号进一步传递给控制系统。
一种车辆防追尾碰撞安全系统设计李智安 (福州大学)摘要 分析了影响行车安全的各种因素,建立了安全车距数学模型,利用现代技术,构造了一种车辆防追尾碰撞安全系统。
主题词 碰撞 安全系统 汽车0 引言汽车的发展为人类的进步做出了重要的贡献,但是交通事故也给人们的生活带来了一定的负面影响,甚至危及生命及财产的安全。
特别是随着高速公路的兴起,交通事故发生数量更显上升趋势,而在高速公路的事故类型中追尾碰撞占了很大的比例。
因此非常有必要开发出一种防追尾碰撞安全系统来遏制追尾碰撞事故的频频发生,以降低高速公路中的事故率。
1 车辆防追尾碰撞安全系统1.1 安全系统的设计思想高速公路上发生事故的原因主要是由于驾驶员的措施不当、疲劳驾驶、疏忽大意以及超速行驶。
因此,本安全系统应该能在事故发生前提醒驾驶员注意以及在紧急情况时帮助驾驶员采取安全措施,以免驾驶员在紧急状况时采取不正当的措施。
同时应该能提醒驾驶员防止由于其疏忽大意和超速行驶而酿成事故。
汽车防追尾碰撞安全系统是利用现代信息技术、传感器技术来扩展驾驶员的感知能力,通过一系列的传感器将行车中的一系列信息和周围的环境参数传递给车中的控制单元,控制单元根据相关的安全车距数学模型进行判断,做出不报警、报警和制动处理措施。
该系统是一种主动安全系统,在正常行驶时,处于非工作状态。
1.2 安全系统的组成汽车的防追尾碰撞安全系统由两个部分组成。
第一部分是防追尾碰撞警报系统(即C W),该系统在探测到路面上出现危险情况时提前发出警报。
第二部分是防追尾自动制动系统(即C A),该系统只在传感器探测到行驶情况为极度危险时才起作用。
本安全系统由信息采集、控制单元、人机界面组成。
(1)信息采集。
即用传感器收集各种行车信息(如己车与目标车辆的间距、相对速度、加速度和节气门开度等)。
由驾驶环境识别系统、行车状况监视系统及路面选择系统组成。
为了提高环境识别的可靠性,可采用多种测距方式和其它传感器相结合的方式进行信息采集。