基于MATLAB SIMULINK 的非线性系统向平面分析法的实现
- 格式:pdf
- 大小:1.25 MB
- 文档页数:71
基于MATLAB-SIMULINK开关磁阻电机非线性建模方法研究与实践基于MATLAB/SIMULINK开关磁阻电机非线性建模方法研究与实践摘要:随着电力系统的发展和节能环保的需求,开关磁阻电机作为一种新型电机逐渐引起了人们的关注。
为了更好地了解开关磁阻电机的特性和性能,本文提出了一种基于MATLAB/SIMULINK的非线性建模方法,并进行了实践验证。
通过该方法,我们可以更好地预测开关磁阻电机在不同工况下的运行情况,为其在实际应用中的优化设计和控制提供参考依据。
关键词:开关磁阻电机;非线性建模;MATLAB/SIMULINK引言开关磁阻电机是一种新型的电机,具有启动、调速范围广、电磁容量大和高效节能等诸多优点。
因此,它在电力系统中的应用前景十分广阔。
为了更好地研究和应用开关磁阻电机,我们需要了解其特性和性能,以便优化其设计和控制。
而非线性建模方法提供了一种有效的手段来描述开关磁阻电机的非线性动态特性。
研究背景开关磁阻电机的非线性动态特性使得传统的线性建模方法难以准确描述其行为。
因此,我们需要一种非线性建模方法来更好地揭示其特性。
目前,基于MATLAB/SIMULINK的非线性建模方法已经被广泛应用于各种电机的研究中,并取得了很好的效果。
建模方法1.建立电机的结构模型:根据开关磁阻电机的结构和工作原理,我们可以构建其结构模型。
通过分析各个部件之间的关系和相互作用,确定各个参数和变量的表达式。
2.建立电机的动态模型:根据电机的结构模型,我们可以建立其动态模型。
考虑到开关磁阻电机的非线性特性,我们可以采用多项式等函数逼近的方法来描述其非线性行为。
3.验证模型的准确性:通过实验数据对建立的模型进行验证。
将实际测得的数据与模型仿真的数据进行对比,评估模型的准确性和可行性。
实验与结果我们选取一台实际的开关磁阻电机进行了实验,通过传感器采集了电机转速、电流和电压等数据,并将其输入MATLAB/SIMULINK中进行仿真实验。

基于MATLAB语言的非线性系统相空间分析一、简述非线性系统相空间分析是研究非线性系统的动力学行为和稳定性的一种方法。
在MATLAB语言中,我们可以通过构建合适的数学模型来描述非线性系统,并利用其强大的数值计算和绘图功能进行相空间分析。
本文将介绍如何使用MATLAB语言对非线性系统进行相空间分析的基本步骤和技巧,包括:建立非线性系统方程、求解方程组、绘制相空间轨迹图等。
通过这些内容的学习,读者可以掌握MATLAB 在非线性系统相空间分析中的应用方法,为进一步深入研究非线性系统提供基础支持。
1. 非线性系统的概念和特点非线性系统是指其行为不能通过线性组合得到的系统,在自然科学、工程技术和社会科学等领域中,非线性系统无处不在,例如:自然生态系统、经济市场、生物医学过程等。
非线性系统的特点是它的输出不仅仅取决于输入,还受到内部状态的影响,这种影响通常是复杂的、难以预测的。
非线性系统的相空间分析是一种处理非线性系统的方法,在MATLAB语言中,我们可以通过使用各种工具箱进行相空间分析,包括解常微分方程(ODE)、解偏微分方程(PDE)以及求解复杂动力学系统等。
首先我们需要理解非线性系统的数学模型,这通常通过将系统的动态方程表示为微分方程来完成。
然后我们可以使用MATLAB的ODE 求解器来求解这些方程,得到系统的相空间轨迹。
此外我们还可以使用MATLAB的PDE工具箱来求解偏微分方程,得到系统的相空间曲面。
除了基本的数值方法外,MATLAB还提供了多种高级功能,如优化工具箱、控制工具箱等,这些都可以用于非线性系统的分析和设计。
例如我们可以使用优化工具箱来寻找最优的控制策略,或者使用控制工具箱来设计自适应控制器。
MATLAB为非线性系统的相空间分析提供了强大的支持,无论是对于理论研究还是实际应用都具有很高的价值。
2. 相空间分析的基本概念和方法相空间分析是一种研究非线性系统动态行为的方法,它通过将系统的微分方程组表示为相空间中的轨迹方程来描述系统的演化过程。
基于Simulink状态空间建模的系统分析方法程序实现荆晓莉(陕西理工学院物电学院电子信息科学与技术1101班,陕西汉中723001)指导老师:龙姝明[摘要] 无论用何种方法求高阶连续系统解析解都是十分棘手的问题。
实际上,科学研究和工程应用中更多地需要系统的数值解。
调用Matlab的Simulink工具包,可以用模块图标方法来编程,并通过运行系统模型文件的方法直接给出连续系统的数值解,而不需要将连续系统转换为离散系统再求解。
对于复杂LTI 系统直接写出微分方程再给出状态空间矩阵很困难,我们获得系统状态空间矩阵的方法是:先将系统映射到s 域,列出解(系统输出)函数的像函数满足的代数方程组,解代数方程组给出系统函数H(s),再调用Matlab的函数[a,b,c,d]=tf2ss(num,den)就得到系统的状态空间矩阵,从而完成系统的描述,再创建系统模型文件,写入状态空间矩阵、输入信号、初值条件及运行相关参数,最后编程调用sim()函数运行模型文件给出连续系统的数值解。
[关键字]连续系统;离散化;Simulink;M文件The implementation of the system analysis method based on Simulink state space modelingJing Xiaoli(Grade11,Class1,Major Electronic Information Science and Technology Department of Physics,ShannxiUniversity of Technology,Hanzhong,723001)Tutor: Long ShumingAbstract It is a difficult problem for the higher order continuous system to solve the problem.In fact,the numerical solution of the system is more needed for scientific research and engineering application.Calling Matlab Simulink toolkit can be programmed by using the method of module icon,and the direct method of operation system model file are given continuous system of numerical solution, without the need to convert the continuous system to discrete system, to be solved. Continuous model, mapped to directly write for complex LTI system differential equations and give the state space matrix is very difficult,we obtain the system state space matrix method is: first the system's domain, a list of solutions (output) function as function satisfies the algebraic equation group, the solution of algebraic equations gives the system function H(s), and then call the Matlab function [A,B,C,D]=tf2ss(num,den) system state space matrix,thus completing the system description, and then create a system file, write the state space matrix, input signal, the initial conditions and operating parameters,programming at last call to sim run the model file is system of numerical solutions.Keywords Continuous system,Discrete,Simulink,M file目录1 状态空间分析方法的概述 (1)2 快速创建LTI连续系统状态空间模型的方法 (2)2.1 创建LTI连续系统传递函数的方法 (2)2.2 构造描述LTI连续系统的状态空间模型矩阵 (3)3 用Simulink状态空间建模求解LTI系统数值解的思路 (4)3.1 LTI连续系统的描述 (4)3.2 创建系统的Simulink状态空间模型 (4)3.3 模块内部参数设置及数据存储 (5)4 利用Simulink状态空间建模求解LTI系统的优缺点 (7)4.1 状态空间建模求解LTI系统的优点 (7)4.2 状态空间建模求解LTI系统的缺点 (7)5 连续系统Simulink状态空间建模分析方法程序设计的思路 (7)5.1 调用模型文件及编程求解系统响应 (7)5.2 分析系统的频谱与相位 (9)6 状态空间分析方法的应用实例 (9)6.1 实际连续系统的描述 (9)6.2 在程序中设置参数 (10)6.3 运行程序,求解系统 (10)结语 (11)附录 (13)最近几年科学不断发展,系统的结构也渐渐复杂。
7-5 非线性控制系统的相平面分析法相平面法在分析非线性系统时是很有用处的。
但是,我们在介绍非线性系统的分析方法之前,先讨论一下相平面法在分析线性二阶系统中的应用是很有好处的。
因为许多非线性元件特性一般都可分段用线性方程来表示,所以非线性控制系统也可以用分段线性系统来近似。
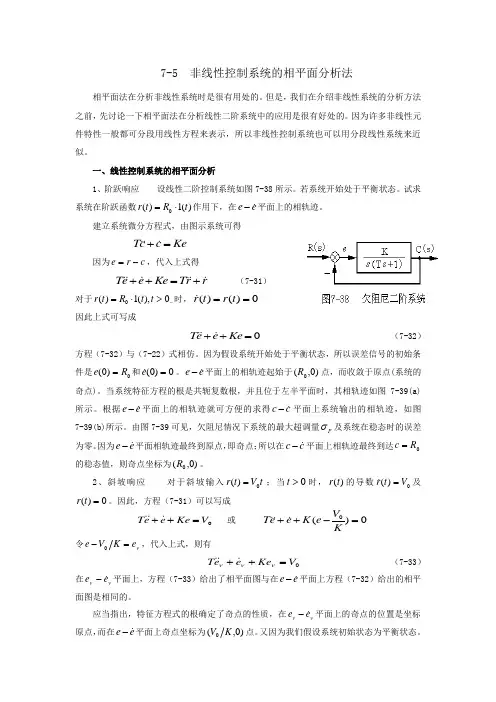
一、线性控制系统的相平面分析1、阶跃响应 设线性二阶控制系统如图7-38所示。
若系统开始处于平衡状态。
试求系统在阶跃函数)(1)(0t R t r ⋅= 作用下,在e e -平面上的相轨迹。
建立系统微分方程式,由图示系统可得Ke c cT =+ 因为c r e -=,代入上式得r r T Ke e e T +=++ (7-31) 对于->⋅=0),(1)(0t t R t r 时,0)()(==t r t r因此上式可写成0=++Ke e e T (7-32)方程(7-32)与(7-22)式相仿。
因为假设系统开始处于平衡状态,所以误差信号的初始条件是0)0(R e =和0)0(=e。
e e -平面上的相轨迹起始于)0,(0R 点,而收敛于原点(系统的奇点)。
当系统特征方程的根是共轭复数根,并且位于左半平面时,其相轨迹如图7-39(a)所示。
根据ee -平面上的相轨迹就可方便的求得c c -平面上系统输出的相轨迹,如图7-39(b)所示。
由图7-39可见,欠阻尼情况下系统的最大超调量P σ及系统在稳态时的误差为零。
因为e e -平面相轨迹最终到原点,即奇点;所以在cc -平面上相轨迹最终到达0R c =的稳态值,则奇点坐标为)0,(0R 。
2、斜坡响应 对于斜坡输入t V t r 0)(=;当0>t 时,)(t r 的导数0)(V t r= 及0)(=t r 。
因此,方程(7-31)可以写成0V Ke e eT =++ 或 0)(0=-++KV e K e e T 令v e K V e =-0,代入上式,则有0V Ke ee T =++ννν (7-33) 在v v ee -平面上,方程(7-33)给出了相平面图与在e e -平面上方程(7-32)给出的相平面图是相同的。

非线性系统建模在MATLAB中的应用方法引言非线性系统的建模是一项重要的任务,它能帮助我们理解和控制各种实际系统,如机械系统、电路系统和生物系统等。
MATLAB是一种功能强大的数学软件,提供了丰富的工具和函数,可以便捷地进行非线性系统建模和分析。
本文将介绍一些常见的非线性系统建模方法,并探讨在MATLAB中的具体应用。
一、非线性系统的特点与分类非线性系统与线性系统相比,具有较为复杂的特性。
其中最主要的特点是系统输出与输入之间存在非线性关系。
根据非线性方程的形式,非线性系统可分为多项式型非线性系统、非线性函数型系统和混合型非线性系统等。
多项式型非线性系统的输出可以由入射信号的幂次项表示,例如y(t) = a0 +a1x(t) + a2x^2(t) + ... + anx^n(t)。
非线性函数型系统则采用非线性函数来描述输出与输入之间的关系,例如y(t) = f(x(t))。
混合型非线性系统是指同时包含多项式型和非线性函数型的系统。
二、非线性系统建模的基本原理非线性系统建模的基本原理是根据系统输入和输出之间的观测数据,通过数据处理方法和数学建模技巧来建立系统的数学模型。
常见的建模方法包括系统辨识法、机器学习方法和贝叶斯统计方法等。
系统辨识法是一种常用的建模方法,它可以通过收集系统的输入和输出数据,并应用系统辨识算法来估计系统的参数和结构。
辨识算法可以分为基于参数的方法和非参数方法。
基于参数的方法假设系统的数学模型已知,通过最小化预测误差来确定模型的参数。
常用的基于参数的辨识方法有最小二乘法和极大似然估计法。
非参数方法则不要求系统的数学模型已知,它通过生成系统的模型结构和参数间的关系来建模。
常用的非参数方法有离散傅立叶变换、小波变换和自适应系统辨识等。
机器学习方法是近年来快速发展的一种非线性系统建模技术,它通过训练数据来学习系统的模式和规律。
常用的机器学习方法包括人工神经网络、支持向量机和决策树等。
这些方法能够有效地处理高维、复杂和非线性的系统建模问题。
实验五 非线性系统的相平面分析法一、实验目的1. 进一步熟悉非线性系统的电路模拟研究方法;2. 熟悉用相平面法分析非线性系统的特性。
二、实验设备同实验一。
三、实验内容1. 用相平面法分析继电型非线性系统的阶跃响应和稳态误差;2. 用相平面法分析带速度负反馈的继电型非线性控制系统的阶跃响应和稳态误差;3. 用相平面法分析饱和型非线性控制系统的阶跃响应和稳态误差。
四、实验原理非线性系统的相平面分析法是状态空间分析法在二维空间特殊情况下的应用。
它是一种不用求解方程,而用图解法给出x 1=e ,x 2=e的相平面图。
由相平面图就能清晰地知道系统的动态性能和稳态精度。
本实验主要研究具有继电型和饱和型非线性特性系统的相轨迹及其所描述相应系统的动、静态性能。
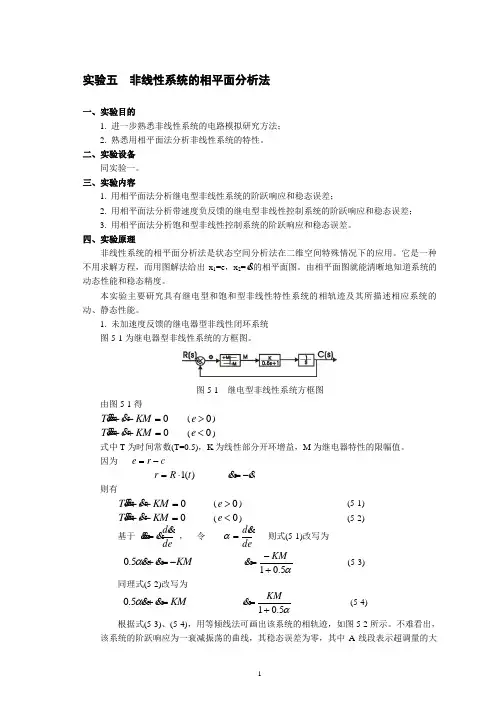
1. 未加速度反馈的继电器型非线性闭环系统 图5-1为继电器型非线性系统的方框图。
图5-1 继电型非线性系统方框图由图5-1得0=-+KM c cT (0>e ) 0=++KM c cT (0<e ) 式中T 为时间常数(T=0.5),K 为线性部分开环增益,M 为继电器特性的限幅值。
因为 c r e -=)(1t R r ⋅= c e-= 则有0=++KM e eT (0>e ) (5-1) 0=-+KM e eT (0<e ) (5-2) 基于 de e d e e = , 令 dee d =α 则式(5-1)改写为KM e e -=+ α5.0 α5.01+-=KMe (5-3)同理式(5-2)改写为KM e e=+ α5.0 α5.01+=KMe (5-4)根据式(5-3)、(5-4),用等倾线法可画出该系统的相轨迹,如图5-2所示。
不难看出,该系统的阶跃响应为一衰减振荡的曲线,其稳态误差为零,其中A 线段表示超调量的大小。
图5-2 阶跃信号作用下继电器型非线性系统的相轨迹2. 带有速度负反馈的继电型非线性闭环控制系统 图5-3为带速度负反馈的继电型非线性系统的方框图。
Matlab中的非线性系统建模与控制引言随着科技的发展,控制论在现代科学技术中扮演着非常重要的角色。
在许多实际问题中,系统的动力学往往是非线性的,这就需要我们使用非线性系统建模与控制的方法。
Matlab作为一种广泛应用的工具,提供了丰富的函数和工具箱,方便我们进行非线性系统建模与控制的研究。
本文将介绍Matlab中非线性系统建模与控制的一些常用方法和技巧,以期帮助读者更好地理解和应用这些技术。
一、非线性系统建模1. 系统建模的基本概念在进行非线性系统建模之前,我们首先需要了解一些基本概念。
系统建模的目的是用数学模型来描述实际系统的行为。
在非线性系统建模中,一般采用微分方程或差分方程来描述系统的动态行为。
此外,还需要确定系统的输入和输出以及系统的状态变量。
通过建立系统的模型,我们可以对系统的行为进行预测和分析,进而设计合适的控制算法。
2. 非线性系统建模的方法非线性系统建模的方法有很多种,下面介绍几种常用的方法:(1)经验模型法:通过实验数据拟合得到系统的数学模型。
这种方法适用于实际系统较为复杂,无法准确建立其具体物理模型的情况。
(2)物理模型法:通过对系统的物理原理进行建模。
这种方法需要具备深厚的相关知识和经验,并且对系统的物理原理有较深入的了解。
(3)灰箱模型法:将经验模型法和物理模型法相结合,通过对系统的具体特性进行分析,建立适当的数学模型。
这种方法结合了实验数据和物理原理,能够较好地描述实际系统的行为。
3. Matlab中的非线性系统建模Matlab提供了丰富的工具和函数来进行非线性系统建模。
其中,Simulink是Matlab中最常用的工具之一。
Simulink提供了一种图形化的界面,使得系统建模更加直观和方便。
通过拖拽相关组件并进行连接,我们可以快速建立非线性系统的模型。
此外,Matlab还提供了一些常用的函数,如ode45和ode15s等,用于求解常微分方程和偏微分方程,从而求解非线性系统的动态行为。
相平面分析matlab 程序《应用非线性控制》,程代展译1、P13:质量-弹簧系统 (1)2、P14:非线性二阶系统 (2)3、P15:一阶非线性系统 (3)4、P17:卫星控制系统 (4)5、P26:课后习题 (7)题2.2 画下列系统的相图 (7)题2.4卫星控制系统 (10)1、P13:质量-弹簧系统0x x +=x D x 相平面分析clearclcx=1; %修改此值Dx=0;n=1;t=0;Dt=0.001;for i=1:8000DDx=-x;Dx=Dx+DDx*Dt;x=x+Dx*Dt;Dx_store(n)=Dx;x_store(n)=x;n=n+1;t=t+Dt;endfigure(1)plot(x_store,Dx_store)xlabel('x')ylabel('Dx')title('相平面分析')hold on2、P14:非线性二阶系统 20.630x x x x +++=x Dx 相平面分析clearclc% x=-6; %i=1:10000% Dx=10;% x=-8; %i=10000% Dx=15;% x=5; %i=1:1700% Dx=7;% x=4; %i=2000% Dx=8;% x=-7; %i=1:1500% Dx=10;%x=-5; %i=1:1200Dx=4;n=1;t=0;Dt=0.001;for i=1:1200DDx=-0.6*Dx-3*x-x^2;Dx=Dx+DDx*Dt;x=x+Dx*Dt;Dx_store(n)=Dx;x_store(n)=x;n=n+1;t=t+Dt;endfigure(1)plot(x_store,Dx_store)xlabel('x')ylabel('Dx')title('相平面分析')hold on3、P15:一阶非线性系统 34x x x =-+x D x 相平面分析clearclcx=1.999; %i=1:2000%x=2.001; %i=1:700%x=-1.999; %i=1:3000%x=-2.001; %i=1:700n=1;t=0;Dt=0.001;for i=1:2000Dx=-4*x+x^3;x=x+Dx*Dt;Dx_store(n)=Dx;x_store(n)=x;n=n+1;t=t+Dt;endfigure(1)plot(x_store,Dx_store)xlabel('x')ylabel('Dx')title('相平面分析')hold on4、P17:卫星控制系统 u θ=505u elseother θ->⎧=⎨⎩x D x 相平面分析clearclcx=0.5; %i=1:5000Dx=0.5;% x=1; %i=1:5000% Dx=1;% %% x=2; %i=1:5000% Dx=2;%% x=3; %i=1:5000% Dx=3;n=1;t=0;Dt=0.001;for i=1:5000if x>0u=-5;elseu=5;endDDx=u;Dx=Dx+DDx*Dt;x=x+Dx*Dt;Dx_store(n)=Dx;x_store(n)=x;n=n+1;t=t+Dt;endfigure(1)plot(x_store,Dx_store)xlabel('x')ylabel('Dx')title('相平面分析')hold on5、P19:范德波尔方程20.2(1)0x x x x +-+=x D x 相平面分析clearclcx=0; %i=1:20000Dx=10;% x=0; %i=1:7000% Dx=2;% x=0;%i=1:50000% Dx=0.1;n=1;t=0;Dt=0.001;for i=1:20000DDx=-0.2*(x^2-1)*Dx-x;Dx=Dx+DDx*Dt;x=x+Dx*Dt;Dx_store(n)=Dx;x_store(n)=x;n=n+1;t=t+Dt;endfigure(1)plot(x_store,Dx_store)xlabel('x')ylabel('Dx')title('相平面分析')hold on5、P26:课后习题 题2.2 画下列系统的相图 (a)0.50x x x ++=x D x 相平面分析clearclcx=0; %i=1:10000Dx=10;% x=0; %i=1:10000 % Dx=-10;% % %% x=-5; %i=1:15000 % Dx=7;% %% x=5; %i=1:15000 % Dx=-7;% %% x=-6;%i=1:20000 % Dx=10;% %% x=6;%i=1:20000% Dx=-10;n=1;t=0;Dt=0.001;for i=1:20000DDx=-Dx-0.5*x;Dx=Dx+DDx*Dt;x=x+Dx*Dt;Dx_store(n)=Dx;x_store(n)=x;n=n+1;t=t+Dt;endfigure(1)plot(x_store,Dx_store)xlabel('x')ylabel('Dx')title('相平面分析')hold on(b) 0.51x x x ++=x D x 相平面分析clearclcx=0; %i=1:10000Dx=10;x=0; %i=1:10000Dx=-10;% % %x=-5; %i=1:15000Dx=7;% %x=5; %i=1:15000Dx=-7;% %x=-6;%i=1:20000Dx=10;% %x=6;%i=1:20000Dx=-10;n=1;t=0;Dt=0.001;for i=1:20000DDx=1-Dx-0.5*x;Dx=Dx+DDx*Dt;x=x+Dx*Dt;Dx_store(n)=Dx;x_store(n)=x;n=n+1;t=t+Dt;endfigure(1)plot(x_store,Dx_store) xlabel('x')ylabel('Dx')title('相平面分析') hold on(c)20.50x x x++=xDx相平面分析clearclcx=-2;%i=1:4000 Dx=20;% x=0; %i=1:2850% Dx=10;% x=-5; %i=1:10150% Dx=20;% x=-5; %i=1:12000% Dx=7;% x=-6;%i=1:20000% Dx=10;% x=0; %i=1:2600% Dx=20;n=1;t=0;Dt=0.001;for i=1:4000DDx=-Dx^2-0.5*x;Dx=Dx+DDx*Dt;x=x+Dx*Dt;Dx_store(n)=Dx;x_store(n)=x;n=n+1;t=t+Dt;endfigure(1)plot(x_store,Dx_store)xlabel('x')ylabel('Dx')title('相平面分析')hold on题2.4卫星控制系统θ=u5505u elseotherθθ⎧-+>=⎨⎩x D x 相平面分析clear clcx=5; %i=1:5000 Dx=0.01;% x=-5; %i=1:5000 % Dx=-0.01; % % %% x=2; %i=1:5000 % Dx=-0.1; % % %% x=-2; %i=1:5000 % Dx=0.1; % % %% x=2; %i=1:5000 % Dx=2; % % %% x=-2; %i=1:5000 % Dx=-2; % % % %% x=3; %i=1:5000 % Dx=3; % % %% x=-3; %i=1:5000 % Dx=-3;n=1; t=0; Dt=0.001;for i=1:5000if 5*x+Dx>0u=-5;elseu=5;endDDx=u;Dx=Dx+DDx*Dt;x=x+Dx*Dt;Dx_store(n)=Dx;x_store(n)=x;n=n+1;t=t+Dt;endfigure(1)plot(x_store,Dx_store) xlabel('x')ylabel('Dx')title('相平面分析') hold on。
非线性系统的相平面分析实验一典型非线性环节一.实验要求1.了解和掌握典型非线性环节的原理。
2.用相平面法观察和分析典型非线性环节的输出特性。
二.实验原理及说明实验以运算放大器为基本元件,在输入端和反馈网络中设置相应元件(稳压管、二极管、电阻和电容)组成各种典型非线性的模拟电路,模拟电路见图3-4-5 ~ 图3-4-8所示。
1.继电特性理想继电特性的特点是:当输入信号大于0时,输出U0=+M,输入信号小于0,输出U0=-M。
理想继电特性如图3-4-1所示,模拟电路见图3-4-5,图3-4-1中M值等于双向稳压管的稳压值。
图3-4-1 理想继电特性图3-4-2 理想饱和特性注:由于流过双向稳压管的电流太小(4mA),因此实际M值只有3.7V。
实验步骤:(1)将信号发生器(B1)的幅度控制电位器中心Y测孔,作为系统的-5V~+5V输入信号(Ui):B1单元中的电位器左边K3开关拨上(-5V),右边K4开关也拨上(+5V)。
(2)模拟电路产生的继电特性:继电特性模拟电路见图3-4-5。
图3-4-5 继电特性模拟电路①构造模拟电路:按图3-4-5安置短路套及测孔联线,表如下。
(b)测孔联线② 观察模拟电路产生的继电特性:观察时要用虚拟示波器中的X-Y 选项慢慢调节输入电压(即调节信号发生器B1单元的电位器,调节范围-5V~+5V ),观测并记录示波器上的U 0~U i 图形,如下图:由图得M=3.77V(3)函数发生器产生的继电特性① 函数发生器的波形选择为‘继电’,调节“设定电位器1”,使数码管右显示继电限幅值为3.7V 。
② 测孔联线:③ 观察函数发生器产生的继电特性:观察时要用虚拟示波器中的X-Y 选项慢慢调节输入电压(即调节信号发生器B1单元的电位器,调节范围-5V~+5V ),观测并记录示波器上的U 0~U i 图形。
实验结果如下实验二 二阶非线性控制系统一.实验要求1. 了解非线性控制系统的基本概念。
巧妙使用Simulink绘制非线性系统的相轨迹
王凤如
【期刊名称】《电气电子教学学报》
【年(卷),期】2004(26)6
【摘要】本文通过三个例题介绍了如何用MATLAB中的Sinulink绘制非线形系统的相轨迹.这种方法基本不需编程,只需在Sinulink环境下正确构成仿真结构图即可,既方便又准确.该方法的应用无疑会促进相平面法的进一步发展.
【总页数】4页(P109-112)
【作者】王凤如
【作者单位】南京航空航天大学,自动化学院,江苏,南京,210016
【正文语种】中文
【中图分类】TP391.9;TP271+.62
【相关文献】
1.高阶PLL非线性捕获的相轨迹和时间响应图的计算机自动绘制 [J], 姜占才
2.空间相轨迹在非线性系统中的应用 [J], 崔庆渝
3.基于LabVIEW的非线性系统相轨迹教学仿真平台设计 [J], 朱天晗;张婧;卢晓;李玉霞;盖文东
4.基于Matlab/Simulink非线性系统相轨迹的绘制 [J], 张婧;盖文东;高宏岩
5.非线性系统相轨迹教学仿真平台设计 [J], 张婧;盖文东;高宏岩;卢晓
因版权原因,仅展示原文概要,查看原文内容请购买。
基于SIMULINK对非线性系统死区环节进行仿真发表时间:2010-07-07T10:57:05.530Z 来源:《价值工程》2010年第1月下旬供稿作者:赵丽[导读] 主要是针对非线性系统死区环节进行SIMULINK仿真,通过仿真分析来实现控制系统的优化。
赵丽(新疆库尔勒巴音郭楞职业技术学院机械电气工程学院,库尔勒 841000)摘要:主要是针对非线性系统死区环节进行SIMULINK仿真,通过仿真分析来实现控制系统的优化。
本文介绍了MATLAB中SIULINK工具的应用,对控制系统非线性环节的死区环节的分析,并用SIMULINK进行仿真解析的过程。
关键词:控制系统;非线性;仿真;死区环节中图分类号:TM92 文献标识码:A 文章编号:1006-4311(2010)03-0085-01 通过分析发现非线性研究方法中的描述函数法和相平面法的不足,既不能分析研究二阶以上的系统,所以我们在用SIMULINK分析非线性系统时我们对线性部分开环传递函数选择为三阶的单位反馈,三阶函数由一个惯性环节和一个震荡环节组成,非线性部分主要是四种典型的非线性环节是死区环节、饱和环节、继电器、间隙环节。
从上述分析,我们可发现当用描述函数法和相平面法分析非线性系统时,这两种方法都有一定得局限性。
所以当我们要分析高阶系统和非线性部分不具有奇对称时,这两种方法都不适用。
但是在MATLAB软件包中的SIMULINK工具可以方便的对高级阶系统计任何非线性系统进行分析研究。
所以SIMULINK可以克服描述函数法和相平面法的不足,能更好的研究非线性系统。
以下是我对控制系统非线性环节的死区环节的分析,并用SIMULINK进行仿真解析的过程。
1 控制系统中的死区特性死区特性也称为不灵敏区。
控制系统中的一些测量、变换部件和各种放大器,在零位附近常有不灵敏区。
另外,电动机由于轴上有静磨擦,故加给电枢的电压必须到达某一数值(即空载启动电压),电机才能开始转动,因此电机也存在不灵敏区(空载启动电压就是电动机的不灵敏区范围);死区也会由于电气触点的气隙、触点压力、弹簧的预张力、各种电路中的不灵敏值等引起;死区在液压和气动系统或元件中也经常可以遇到。