模糊控制在数字溢流阀中应用研究
- 格式:pdf
- 大小:207.49 KB
- 文档页数:4
模糊控制系统在供水治理中的应用优化第一章:引言1.1 背景介绍供水是人类社会生存的基本需求,而供水治理是确保可持续供水的重要环节。
随着人口增长和城市化进程的加快,供水治理面临着越来越大的挑战。
如何优化供水治理过程,提高供水质量和效率,成为了当前亟待解决的问题。
1.2 研究目的本文旨在探讨模糊控制系统在供水治理中的应用优化,通过使用模糊控制系统改进供水治理过程,提高供水质量和效率,以满足不断增长的供水需求。
第二章:供水治理的问题与挑战2.1 城市化带来的挑战城市化进程导致城市人口的迅速增长,进而对供水系统提出更高的要求。
供水管网老化、供水流量不均匀、水质监测不准确等问题成为了供水治理面临的主要挑战。
2.2 传统供水治理方法的局限性传统供水治理方法往往基于经验规则和静态模型,对于变化复杂的供水系统来说,其适应性和响应速度都较差。
因此,需要引入更加灵活、智能的供水治理方法。
第三章:模糊控制系统的基本原理3.1 模糊控制系统概述模糊控制系统是一种基于模糊逻辑的控制方法,通过将输入、输出和系统状态模糊化,建立模糊规则集来实现对复杂系统的控制。
3.2 模糊控制系统的工作原理模糊控制系统由模糊化、模糊推理和解模糊化三个步骤组成。
其中,模糊化将实际变量转化为模糊变量,模糊推理利用模糊规则对输入进行推理,解模糊化将模糊输出转化为实际控制信号。
第四章:模糊控制系统在供水治理中的应用4.1 模糊控制系统在供水流量控制中的应用通过对供水管网的流量进行实时监测和模糊推理,可以根据实际情况调整供水泵的流量,以适应城市的供水需求变化。
4.2 模糊控制系统在水质监测与调控中的应用通过对水质监测数据的模糊化和模糊推理,可以实现对水质调控设备的自动控制,提高水质监测和调控的准确性和效率。
4.3 模糊控制系统在供水管网维护中的应用供水管网的维护需要及时发现和解决管网老化、泄漏等问题。
通过对供水管网的监测数据进行模糊推理,可以实现对管网问题的预警和自动修复,提高供水管网的可靠性和安全性。

模糊控制在水资源管理中的应用研究随着人口的增加和经济的发展,我们的水资源变得越来越紧张。
在当前这个时代,水资源的管理变得越来越重要。
许多国家都在积极寻找创新的方式来管理水资源,其中模糊控制是一种备受关注的技术。
本文将探讨模糊控制在水资源管理中的应用研究。
一、什么是模糊控制模糊控制是一种应用于工程和科学中的控制技术。
这项技术大多用于那些非精确系统和无法精确测量的系统中。
它基于不确定性和直觉。
模糊控制理论基础是计算机运算能力的提升和模糊逻辑的发展。
模糊控制系统是一种处理模糊信息的技术。
它包括模糊推理和控制技术。
二、模糊控制在水资源管理中的应用在水资源管理中,模糊控制的优点很明显。
模糊控制可以根据经验提供决策,甚至在遇到复杂水文情况时也能提供决策。
换句话说,模糊控制是一种用于分析并控制非线性系统的良好方法。
在管理水资源时,模糊控制的应用可能是最广泛的。
如何加强水资源管理是一个关键的问题,我们需要在管理过程中确保资源的有效使用。
模糊控制在这方面可以做的很好。
模糊控制可以在水泵的自动化控制系统中使用。
在旱季,水泵控制系统可以根据水位高度自动调节泵的速度。
模糊控制可以读取水位的高低来调整水泵的运转速度,从而确保水泵运转的效率。
此外,模糊控制还可用于水质控制。
水中往往可能会存在一些难以检测或指定的化学物质,如有机物和痕量金属。
使用模糊控制可以有效的确定水质,确保水质符合国家标准。
三、模糊控制在水资源管理中的优势相比传统控制技术,模糊控制有许多优势,特别适用于模糊的、不确定性和非线性系统。
1、模糊控制既能处理精确的、有意义的信息,也能处理模糊、有歧义的信息;2、模糊控制可以让管理者快速响应和适应不断变化的管理需求,从而提高效率;3、模糊控制处理不确定性的能力使其更具可靠性和稳定性,能够更好地适应水资源管理中的动态变化;4、模糊控制可以更好地解决高噪声和多次数据控制。
在模糊控制中,随着时间的推移,控制器发生的连续调整可以使系统在水资源管理中更加稳定。

模糊逻辑控制器在机电控制系统中的应用研究随着工业自动化的发展,机电控制系统的应用越来越广泛。
而在机电控制系统中,逻辑控制器的作用尤为重要。
传统的逻辑控制器使用的是布尔逻辑,即只有真或假两种状态;而在一些特殊的控制系统中,不同的状态间通常存在一定的模糊性。
为了解决这一问题,模糊逻辑控制器应运而生。
一、模糊逻辑控制器的概念模糊逻辑控制器(FLC)是一种基于模糊数学理论的控制器。
与传统的逻辑控制器不同,FLC能够处理不精确或模糊的信息,通常由以下三个部分组成:模糊化、模糊推理和去模糊化。
其中,模糊化将输入的实数值映射到一个模糊量域,在模糊推理阶段,根据指定的规则,计算出输出变量的模糊量,最后通过去模糊化生成真实的输出值(如图1所示)。
FLC通常具有无需现场调节、对于非线性系统的建模能力强等优点,因此在机电控制系统中得到了广泛的应用。
图1 模糊逻辑控制器的基本构成图二、模糊逻辑控制器的应用研究1. FLC在机械手臂中的应用机械手臂是一种针对物体的抓取和移动系统,并且其操作要求高度精准。
在以往的机械臂控制系统中,往往需要专门的机械学习算法和较强的计算性能,而FLC则可以通过简单的规则来实现机械臂控制。
研究表明,FLC在机械臂运动轨迹控制、抓取力控制等方面的效果都比较优秀。
2. FLC在电机控制系统中的应用电机控制系统是机电控制系统中的一个重要组成部分,FLC一般被用作模糊控制器,可以在输入电机的一些原始指令信号中进行模糊转换,并产生相应的输出控制信号来控制电机的加减速、位置精度等方面。
这种应用可以有效地解决传统电机控制方式中频繁的换向问题,有效地提高了电机控制的效率和稳定性。
3. FLC在智能流量控制中的应用FLC在智能流量控制系统中的应用领域广泛,包括了水力学、航空航天、石油化工、制药等多个行业。
其中,智能流量控制器通常可以用来控制液压设备中受控液压回路的输出以及一些完全自主控制的液压动作。
这种应用可以在快速响应和自适应控制方面显著优于传统流量控制器。
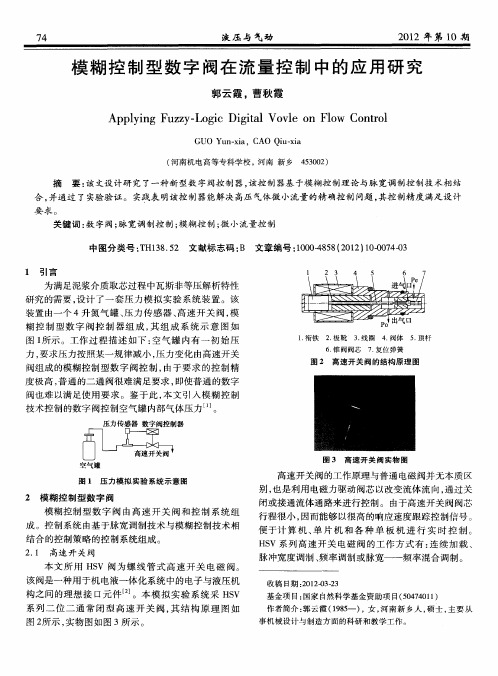
模糊控制在智能调节阀定位器控制系统中的应用气动调节阀是一种重要的执行器,它是众多的工业过程控制系统装置,尤其是在石化、冶金等工业的流量控制中发挥着不可替代的作用。
而气动阀门定位器作为它的主要附件之一,可以改善阀门特性、提高控制的精度、速度和增加控制的灵活性。
随着工业的进步,阀门定位器从最初的纯气动、机械力平衡式的,发展到后来的使用电磁转换的电磁阀门定位器,直到今天的智能型和使用现场总线技术的定位器,其总的趋势是电气化、智能化,并且必定要与将来的全数字化工业控制相适应[1]。
为此,我们结合单片机和模糊控制理论知识,对智能电-气阀门定位器进行了研制。
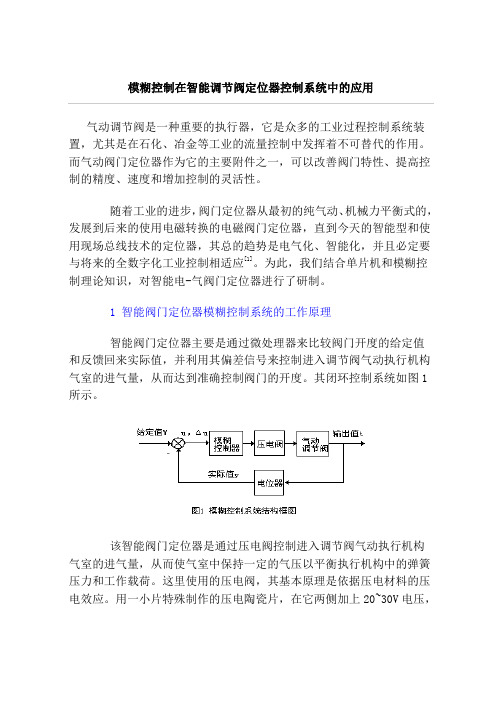
1 智能阀门定位器模糊控制系统的工作原理智能阀门定位器主要是通过微处理器来比较阀门开度的给定值和反馈回来实际值,并利用其偏差信号来控制进入调节阀气动执行机构气室的进气量,从而达到准确控制阀门的开度。
其闭环控制系统如图1所示。
该智能阀门定位器是通过压电阀控制进入调节阀气动执行机构气室的进气量,从而使气室中保持一定的气压以平衡执行机构中的弹簧压力和工作载荷。
这里使用的压电阀,其基本原理是依据压电材料的压电效应。
用一小片特殊制作的压电陶瓷片,在它两侧加上20~30V电压,压电陶瓷片就会发生弯曲,总的形变量可达几十微米。
从而可以堵住/放开进气口或排气口,达到控制气流的目的。
由于传统的控制算法,需要知道被控对象的精确的数学模型,才能有效地进行控制,而工作载荷是变动的,进入执行机构气室的气压也随环境温度和供气压力的变动而变动,所以很难准确把握一次性进气量,所以控制效果不好。
同时,如果控制不好,很容易使气动执行机构处于来回振荡的状态中。
因此,考虑到模糊控制具有人的智能思维、适应性好、鲁棒性强等特点,我们在智能阀门定位器的控制系统中把模糊控制理论知识运用到该控制系统中。
在该系统中,我们把单片机89C51将采集到的阀门开度与设定值相比较得出的阀门开度偏差u、开度的变化率Δu进行模糊化后,再由模糊控制算法进行模糊推理判断,根据不同的判断结果发出一定宽度的脉冲信号去控制压电阀占空比,即压电阀根据不同宽度的脉冲信号对执行机构的气室进行连续供气、断续供气和停止供气,从而使智能阀门定位器既快又准地控制阀门开度[5]。
模糊控制型数字阀在流量控制中的应用研究
郭云霞;曹秋霞
【期刊名称】《液压与气动》
【年(卷),期】2012(000)010
【摘要】该文设计研究了一种新型数字阀控制器,该控制器基于模糊控制理论与脉宽调制控制技术相结合,并通过了实验验证.实践表明该控制器能解决高压气体微小流量的精确控制问题,其控制精度满足设计要求.
【总页数】3页(P74-76)
【作者】郭云霞;曹秋霞
【作者单位】河南机电高等专科学校,河南新乡453002;河南机电高等专科学校,河南新乡453002
【正文语种】中文
【中图分类】TH138.52
【相关文献】
1.模糊控制在数字溢流阀中应用研究 [J], 陈小云;陈淑梅
2.基于模糊控制的流量控制阀仿真 [J], 刘志壮;洪添胜;李震;宋淑然;岳学军;樊志平
3.环腔控制型插装式事故配压阀的应用研究 [J], 王伟;王鑫
4.模糊及PID控制在变转速液压动力源流量控制中的应用研究 [J], 谷立臣;祁泽林;李贾宝
5.级间液压-机械双反馈新原理及其在大流量控制阀中的应用研究 [J], 刘建彬;杨华勇;谢海波
因版权原因,仅展示原文概要,查看原文内容请购买。
阀控缸模糊控制研究为了提高阀控缸的位置跟踪性能,研究了模糊控制策略。
利用AMESim和MATLAB的联合仿真功能,建立了阀控缸的模糊控制和PID控制仿真模型。
仿真结果表明,在阀控缸系统中,应用模糊控制策略能得到更高的位置跟踪精度。
标签:AMESim;MATLAB;联合仿真;模糊控制1 引言阀控缸回路广泛用于各类液压系统,是典型的直线运动机构,可执行诸如输送、夹紧等运动功能,其位置跟踪精度,关系到系统的整体性能。
在阀控缸的控制方法上,应用比较成熟的是PID控制技术。
传统的PID控制技术实现简单,调节方便,可靠性高,易于控制,从而得到了广泛的应用。
在一些要求不高的场合,PID控制可使系统达到设计要求,但在一些对精度要求较高的场合,PID控制往往不尽人意,尤其是系统具有大滞后,强时变性的时候。
在实际应用中,阀控缸系统工况一般比较复杂,例如油缸惯性大,运动过程中油压不稳,阀与缸不能完全匹配,缸往复运动负载不同等等,用PID控制难以适应系统工况变化。
模糊控制由于具有不依赖于被控制对象的精确数学模型,对参数变化不敏感,控制方法简单,实际效果好等特点,被广泛应用于各个领域。
本文针对阀控缸存在的大惯量,负载不同等特点,设计了模糊算法,并利用AMESim和MATLAB的联合仿真技术进行仿真。
2 控制方法研究2.1 PID控制仿真模型设计在AMESim中建立系统的液压原理图,在泵出口连接蓄能器,以稳定油压。
利用伺服阀控制油缸,以提高系统的响应和精度。
将油缸连接负载,在负载处得到油缸的位移量,与给定信号进行相减,作为控制器的输入。
在程序中添加interface block,作为与MATLAB联合仿真的接口。
各元件设置如下,泵排量180cc/rev,电机转速1450rev/min,溢流阀调定压力160bar,蓄能器容积6.3L,开口42mm,伺服阀固有频率50Hz,额定电流40mA,液压缸活塞腔直径130mm,活塞杆直径120mm,活塞初始位置为中间,惯性质量1500kg,粘性摩擦力200N/(m/s),负载力28kN,输入信号为正弦波,幅值为0.04m,频率为1.5Hz。
自动化控制系统中的模糊控制技术应用研究自动化控制系统是现代工业生产中不可或缺的一部分,它的目标是通过控制算法和设备,实现对系统的精确控制。
而在自动化控制系统中,模糊控制技术作为一种重要的控制方法,逐渐被广泛应用。
本文将探讨模糊控制技术在自动化控制系统中的应用研究。
一、模糊控制技术概述模糊控制技术是20世纪70年代提出的一种控制方法,它通过建立模糊集合、模糊规则和模糊推理机制,实现对非精确系统的控制。
相比于传统的精确控制算法,模糊控制技术具有以下优势:1. 模糊控制技术能够应对系统建模不准确的问题,适用于复杂的非线性系统。
2. 模糊控制技术能够处理具有不确定性或模糊性的输入和输出变量,提高系统的稳定性和适应性。
3. 模糊控制技术具有较强的人工智能特性,可以模拟人类的控制思维和行为,更好地与人机交互。
二、模糊控制技术在自动化控制系统中的应用1. 模糊控制技术在温度控制系统中的应用在工业生产过程中,温度控制是一个关键的环节。
传统的精确控制方法往往需要建立复杂的数学模型,对系统建模要求较高。
而模糊控制技术可以通过模糊集合和模糊规则来描述温度变化过程中的不确定性和模糊性,更好地适应温度系统的复杂性。
2. 模糊控制技术在机器人控制系统中的应用机器人控制系统是自动化控制系统的一个重要应用方向。
传统的机器人控制方法往往需要建立复杂的动力学模型和轨迹规划算法,对计算资源要求较高。
而模糊控制技术可以通过模糊推理机制实现对机器人运动轨迹的智能规划和控制,提高机器人的适应性和灵活性。
3. 模糊控制技术在交通控制系统中的应用交通控制是一个与人们日常生活密切相关的领域。
传统的交通控制方法往往基于固定的时间表或交通流量的统计规律,难以适应交通系统的动态变化。
而模糊控制技术可以通过模糊推理机制实时调整信号灯的相位和时序,根据道路车流的实际情况进行智能的交通控制,提高交通系统的效率和安全性。
三、模糊控制技术应用研究的挑战与展望尽管模糊控制技术在自动化控制系统中取得了一定的成就,但仍然面临一些挑战。
2008年第27卷12月第12期机械科学与技术M echanical Science and Technol ogy for A erospace Engineer i ng December Vo.l 272008No .12收稿日期:2007212219基金项目:国家863计划项目(2003AA430200)和教育部/新世纪优秀人才支持计划0项目(NCET 20520697)资助作者简介:朱建新(1965-),教授,博士生导师,研究方向为液压传动与控制,zji anx 2918@163.co m朱建新一种新型电液比例阀的模糊控制研究朱建新1,2,杨 翔1,梅勇兵1,何清华1,2(1中南大学机电工程学院,长沙 410083;2湖南山河智能机械股份有限公司,长沙 410100)摘 要:在介绍了国外一种基于双阀芯控制的新型电液比例阀的结构和工作原理的基础上,建立了该阀的数学模型,并指出了该阀在先导阀2主阀环节的传递函数与经典阀控对称液压缸的传递函数的不同。
应用Matlab /Si m uli n k 设计了Fuzz y 2PI D 双模模糊控制器,并对系统进行了仿真研究。
仿真结果表明采用Fuzz y 2PI D 双模模糊控制策略控制主阀芯是行之有效的。
关 键 词:电液比例阀;模糊控制;双阀芯;对称缸中图分类号:T H 137152 文献标识码:A 文章编号:100328728(2008)1221651204On Fuzzy Con trol of a Ne w Type of E lectro 2hydraulicP roporti onal Va lveZhu Ji anxi n 1,2,Yang X iang 1,M eiYongb i ng 1,H e Q i nghua1,2(1College ofM echanical and E lectr i ca l Engi neer i ng ,Centra l So uth Univers it y ,Changsha 410083;2Hunan Sunwa rd Inte lli gentM achi nery Co .,Lt d ,Changsha 410100)Abstr act :W e first i n troduced the structure and the working pri n ciple of a ne w type of electron ic 2hydraulic propor 2ti o na l valve wh ich is based on t w i n spool contro.l Then ,we estab lished the m athe matical model of the va l v e and poi n ted out the d iff erence bet w een the transf er f unction of p ilot va lve toma i n valve and the transf er f uncti o n of c las 2sica l valve contr ol sy mmetr y cyli n der .A f ter tha,t we desi g ned a dual 2mode f u zzy contr oller and si m ulated the sys 2te m i n Matlab /Si m uli n k sof t w are .The si m u lation result sho w tha t f uzzy 2PI D dualmode f uzz y contr ol strategy is f ea 2si b le and eff ecti v e f or th is valve .K ey w ord s :e l e ctr o 2hydrau lic proportional va l v e ;f uzz y contro;l t w i n spoo;l sy mmetry cyli n der 液压系统中的负载口独立控制技术是当今最前沿的研究热点,自从德国Back 教授在插装阀控制理论中引入了独立控制概念后[1,2],各国研究者都开始对独立调节原理和控制策略进行研究。