动态车辆路径问题的优化方法
- 格式:pdf
- 大小:348.09 KB
- 文档页数:5
车辆路径规划问题研究综述车辆路径规划问题是指在给定条件下,求解车辆如何合理地选择路径和行驶顺序,以达到某种最优化目标的问题。
在现实生活中,车辆路径规划问题广泛应用于物流配送、公交线路规划、交通流控制等领域,对于提高交通运输效率、减少能源消耗、缓解交通拥堵具有重要意义。
随着信息技术和智能算法的发展,车辆路径规划问题得到了越来越多的关注和研究。
一、车辆路径规划问题的分类车辆路径规划问题可以分为静态车辆路径规划和动态车辆路径规划两大类。
静态车辆路径规划是指在路网、需求、车辆等参数全部给定的情况下,确定车辆的最优路径和行驶顺序。
而动态车辆路径规划则是指在一定时间段内,根据实时交通信息和需求变化,动态地调整车辆的路径和行驶顺序。
静态车辆路径规划问题通常应用于物流配送、固定路线的公交线路规划等场景,而动态车辆路径规划问题更多地应用于交通流控制、共享出行等领域。
二、车辆路径规划问题的方法1. 传统方法在早期,对车辆路径规划问题的研究主要依赖于传统的规划和优化技术,如线性规划、整数规划、动态规划等。
这些方法在一定范围内能够解决一些简单的车辆路径规划问题,但对于复杂的实际问题往往效率不高,无法在合理的时间内给出最优解。
2. 启发式算法随着计算机科学和运筹学的发展,启发式算法逐渐被引入到车辆路径规划问题的研究中。
启发式算法是一类基于经验和规则的算法,能够在有限时间内找到接近最优解的解决方案。
蚁群算法、遗传算法、模拟退火算法等成为应用较多的启发式算法。
这些算法通过模拟自然界的优化过程,使得车辆路径规划问题的解空间得到了更好的搜索,能够有效处理一些中等规模的问题。
3. 智能算法近年来,随着人工智能和深度学习技术的发展,越来越多的研究者尝试将这些技术引入到车辆路径规划问题的研究中。
神经网络、深度强化学习等技术被应用于解决车辆路径规划问题,在一些复杂的场景和大规模问题中取得了较好的效果。
智能算法具有较强的适应性和泛化能力,能够在复杂的实际环境中进行路径规划和决策。
车辆路径问题的求解方法
车辆路径问题是指在给定的地图或路网上,寻找一条最优路径或最短路径,使得车辆从起点到终点能够在最短时间或最小代价内到达目的地。
常见的车辆路径问题包括最短路问题、最小生成树问题、最优化路径问题等。
以下是常见的车辆路径问题的求解方法:
1. Dijkstra算法:Dijkstra算法是求解单源最短路径问题的经典算法,它通过不断更新起点到各个节点的最短距离来求解最短路径。
该算法适用于路网较小的情况。
2. Floyd算法:Floyd算法是一种求解任意两点间最短路径的算法,它通过动态规划的思想,逐步计算出任意两点之间的最短路径。
该算法适用于路网较大的情况。
3. A*算法:A*算法是一种启发式搜索算法,它通过估计每个节点到终点的距离,来选择最优的扩展节点。
该算法适用于需要考虑路况等因素的情况。
4. 蚁群算法:蚁群算法是一种模拟蚂蚁觅食行为的算法,它通过模拟蚂蚁在路径上的行走过程,来寻找最优路径。
该算法适用于需要考虑多个因素的情况。
5. 遗传算法:遗传算法是一种模拟生物进化过程的算法,它通过不断交叉、变异、选择等操作,来寻找最优解。
该算法适用于需要考虑多个因素的情况。
以上是常见的车辆路径问题的求解方法,不同的问题需要选择不同的算法来求解。
车辆调度和路线优化的优先级算法车辆调度和路线优化是物流运输中至关重要的环节,它们直接关系到货物的准时送达和运输成本的降低。
为了有效地解决车辆调度和路线优化的问题,我们可以采用优先级算法来进行优化。
优先级算法是一种常用的算法,通过给任务或问题赋予不同的优先级,将任务按照优先级的高低进行排序和处理,以实现最优解。
在车辆调度和路线优化中,我们可以将某些关键因素纳入考量,设定相应的优先级,以达到最佳调度和路线方案。
首先,对于车辆调度,我们可以考虑以下几个因素来确定优先级。
首先是货物的紧急程度,即根据货物的种类和重要性确定调度的紧迫程度。
其次是车辆的可用性,包括车辆数量和状况的考虑,确保任务能够得到及时分配和执行。
此外,还应考虑道路的交通情况和通畅程度,以及其他可能影响调度效果的因素,如天气预报等。
通过对这些因素的量化和综合评估,确定每个任务的优先级。
在确定了车辆调度的优先级后,我们可以综合考虑路线优化的因素。
一方面,我们可以考虑最短路径算法,即选择使总行驶距离最短的路径。
这可以减少车辆的行驶时间和成本,并提高送货效率。
另一方面,我们还可以考虑其他因素,如道路拥堵、交通信号灯的配时、路况等,以选择更加合适的路线。
例如,在高峰期选择绕行道路,避免交通拥堵,提高送货效率。
此外,我们还可以在优先级算法中引入动态优化的策略。
即通过对实时交通信息和货物状态的监测和反馈,不断调整车辆调度和路线优化的优先级。
例如,当某个任务出现紧急情况时,可以提高其优先级,使其尽快得到处理和分配。
而当路况发生变化时,可以根据实时交通信息,动态调整车辆的路线选择,以避免拥堵和延误。
综上所述,车辆调度和路线优化的优先级算法在物流运输中起到至关重要的作用。
通过合理设定和综合考虑不同因素的优先级,在满足货物准时送达和运输成本降低的前提下,实现最佳的车辆调度和路线方案。
同时,通过引入动态优化的策略,能够根据实时情况不断调整和优化优先级算法,进一步提高运输效率和服务质量。
导航系统中的车辆路径搜索算法优化研究导航系统在现代交通中起着至关重要的作用。
为了确保车辆能够沿着最佳路径准确地到达目的地,导航系统需要具备高效、准确的路径搜索算法。
本文将着重研究导航系统中的车辆路径搜索算法优化,探讨如何提高导航系统的路径搜索效率和准确性。
一、导航系统中的路径搜索算法导航系统中常用的路径搜索算法有很多,例如Dijkstra算法、A*算法、动态规划等。
这些算法各有特点和适用场景,在实际的导航系统中常常结合使用,以提高路径搜索的效率和准确性。
其中,Dijkstra算法是一种经典的单源最短路径搜索算法,其原理是从起点开始,逐步扩展路径,直到到达目标点。
该算法适用于无向图和带权重的有向图,但在导航系统中可能会遇到路径搜索速度较慢的问题,特别是在遇到复杂的地图和大规模的数据集。
A*算法是一种启发式搜索算法,采用估计函数来指导搜索过程。
它利用启发式函数(通常是估计到目标点的距离)来评估选择哪条路径,以减少搜索的范围。
A*算法在时间和空间效率上相对较好,适用于大规模的地图和复杂的路网。
动态规划是一种利用历史信息来优化路径搜索的方法。
它通过记忆路径搜索过程中的决策和结果,避免重复计算,降低搜索的复杂度。
然而,在实际应用中,动态规划算法可能受限于存储空间和计算能力,对于复杂的导航系统需要进一步优化。
二、车辆路径搜索算法的优化方向为了进一步提高导航系统中的路径搜索效率和准确性,可以从以下几个方面进行优化:1. 地图数据的处理和存储优化:地图数据是导航系统中的核心资源,准确的地图数据可以提高路径搜索的效率和准确性。
为了优化地图数据的处理和存储,可以采用压缩算法来减少存储空间,预处理地图数据以提高搜索的速度,同时考虑实时交通信息对路径搜索的影响。
2. 优化启发式函数的设计:启发式函数在A*算法中起到了关键作用,它影响着路径搜索的效率和准确性。
为了优化启发式函数的设计,可以考虑更精确的距离估计方法,引入实时交通信息来预测道路拥堵情况,提供更准确的路径选择。
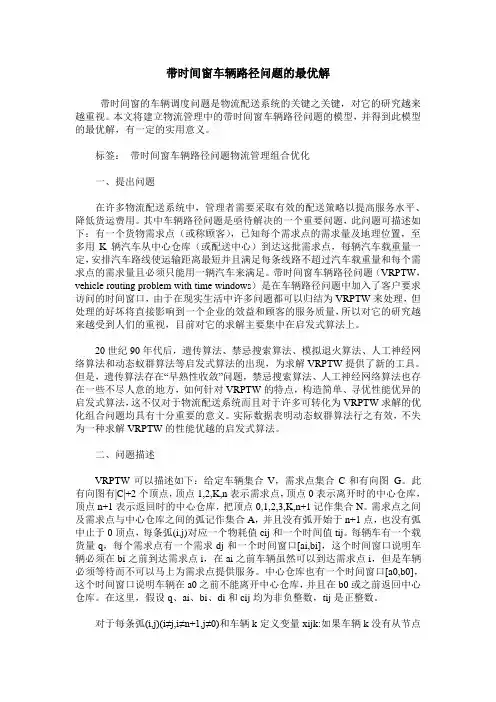
带时间窗车辆路径问题的最优解带时间窗的车辆调度问题是物流配送系统的关键之关键,对它的研究越来越重视。
本文将建立物流管理中的带时间窗车辆路径问题的模型,并得到此模型的最优解,有一定的实用意义。
标签:带时间窗车辆路径问题物流管理组合优化一、提出问题在许多物流配送系统中,管理者需要采取有效的配送策略以提高服务水平、降低货运费用。
其中车辆路径问题是亟待解决的一个重要问题,此问题可描述如下:有一个货物需求点(或称顾客),已知每个需求点的需求量及地理位置,至多用K辆汽车从中心仓库(或配送中心)到达这批需求点,每辆汽车载重量一定,安排汽车路线使运输距离最短并且满足每条线路不超过汽车载重量和每个需求点的需求量且必须只能用一辆汽车来满足。
带时间窗车辆路径问题(VRPTW,vehicle routing problem with time windows)是在车辆路径问题中加入了客户要求访问的时间窗口,由于在现实生活中许多问题都可以归结为VRPTW来处理,但处理的好坏将直接影响到一个企业的效益和顾客的服务质量,所以对它的研究越来越受到人们的重视,目前对它的求解主要集中在启发式算法上。
20世纪90年代后,遗传算法、禁忌搜索算法、模拟退火算法、人工神经网络算法和动态蚁群算法等启发式算法的出现,为求解VRPTW提供了新的工具。
但是,遗传算法存在“早熟性收敛”问题,禁忌搜索算法、人工神经网络算法也存在一些不尽人意的地方,如何针对VRPTW的特点,构造简单、寻优性能优异的启发式算法,这不仅对于物流配送系统而且对于许多可转化为VRPTW求解的优化组合问题均具有十分重要的意义。
实际数据表明动态蚁群算法行之有效,不失为一种求解VRPTW的性能优越的启发式算法。
二、问题描述VRPTW可以描述如下:给定车辆集合V,需求点集合C和有向图G。
此有向图有|C|+2个顶点,顶点1,2,K,n表示需求点,顶点0表示离开时的中心仓库,顶点n+1表示返回时的中心仓库,把顶点0,1,2,3,K,n+1记作集合N。

车辆路径规划模型的优化算法研究车辆路径规划是一种重要的优化问题,目的是确定一条最优路径,使车辆在满足各种限制条件下,尽快到达目的地。
随着交通网络的复杂性和车辆数量的增加,车辆路径规划变得更加困难和复杂。
因此,研究车辆路径规划模型的优化算法成为提高交通效率和减少交通拥堵的关键。
1. 研究背景与意义车辆路径规划在现代交通系统中具有广泛的应用价值。
通过优化车辆路径,可以有效减少交通拥堵、降低能源消耗、提高交通效率和交通安全性等方面的问题。
因此,对于车辆路径规划模型的研究具有重要的理论和实际意义。
2. 相关研究现状目前,关于车辆路径规划优化算法的研究已取得了一定的进展。
常见的研究方法包括基于遗传算法、模拟退火算法、禁忌搜索算法、蚁群算法、粒子群优化算法等。
这些算法在不同的场景下都有一定的优势和适用性。
3. 优化算法的原理介绍(1)遗传算法:遗传算法是一种基于生物进化思想的优化算法。
通过模拟自然界的进化过程,通过选择、交叉和变异等操作,形成新的个体并使其逐步优化,最终获得最优解。
(2)模拟退火算法:模拟退火算法是一种基于物理退火原理的启发式优化算法。
它通过随机选取一定数量的解,并通过一定的接受准则来判断是否接受新解,从而逐步优化解的质量。
(3)禁忌搜索算法:禁忌搜索算法是一种基于搜索与回溯的优化算法。
它通过记录和管理已经搜索过的解,并根据一定的禁忌策略来避免陷入局部最优解,从而找到更好的解。
(4)蚁群算法:蚁群算法是一种模拟蚂蚁寻找食物的行为而得到的优化算法。
蚂蚁通过释放信息素来引导其他蚂蚁选择路径,通过间接的信息传递方式来完成路径规划。
(5)粒子群优化算法:粒子群优化算法是一种模拟鸟群搜索食物的行为而得到的优化算法。
通过模拟粒子的飞行和搜索行为,通过个体和社会的信息交流来达到优化目标。
4. 优化算法在车辆路径规划中的应用优化算法可以应用于车辆路径规划的多个方面,例如:(1)路网建模:通过构建适当的路网模型,能够更好地反映实际道路网络的特征。
限行约束下动态车辆路径问题研究限行约束下动态车辆路径问题研究摘要:随着城市交通量的不断增加和交通拥堵的日益严重,限行政策已经成为许多大中城市缓解交通压力的重要手段之一。
然而,限行政策也给动态车辆路径规划带来了新的挑战。
本文通过对限行约束下动态车辆路径问题的研究,分析了现有研究成果和存在的问题,并提出了一种基于智能算法的路径规划方法,以期为城市交通管理和智能交通系统的发展提供参考。
1. 引言在现代城市交通系统中,车辆路径的规划是一个重要的研究领域。
传统的车辆路径规划方法主要考虑最短路径或最快路径等优化目标,但未考虑到实际城市道路网络的限制条件,例如限行政策。
限行政策通过对某些时间段或区域内的车辆行驶进行限制,来减少交通拥堵和空气污染。
然而,限行政策给动态车辆路径规划带来了新的挑战,如何在限行约束下,合理规划车辆路径成为了一个重要的问题。
2. 限行约束下动态车辆路径规划问题分析在限行约束下,车辆路径规划问题的目标不再局限于最短路径或最快路径,还需要考虑限行政策的约束条件。
根据不同城市的限行政策,这些约束条件可以包括限行时间段、限行区域、限行车辆类型等。
车辆路径规划需要在满足限行约束的前提下,使得车辆的行驶距离和路径时间最小。
3. 现有研究成果和问题分析目前,已有一些研究关注限行约束下动态车辆路径规划问题。
其中一些方法是基于传统的路径规划算法,通过引入限行约束来改进规划结果。
另一些方法是基于智能算法,如遗传算法、模拟退火算法等,通过优化目标函数,以寻找最优路径。
然而,现有研究存在一些问题,包括算法效率低,局限于特定的限行约束条件,以及缺乏对城市交通实际情况的考虑等。
4. 基于智能算法的路径规划方法为了解决现有研究存在的问题,本文提出了一种基于智能算法的路径规划方法。
首先,建立城市道路网络的图模型,将限行约束转化为图的约束条件。
然后,采用遗传算法优化路径规划问题,以最小化车辆行驶距离和路径时间为目标函数。
改进的蚁群优化的动态多车场车辆路径问题动态车辆路径问题(DVRP)单一车场的已经受到工程师和科学家越来越多的关注。
但是,动态多车场车辆路径的问题(DMDVRP)的延伸DVRP,一直没有受到重视。
在我们的文章中,基于距离的聚类方法通过分配每个客户到其最近的车场的方式引入到简化的DMDVRP。
因此,DMDVRP被分解成序列的DVRPs。
在本文中改进的蚁群优化(IACO)的蚂蚁策略和变异操作提出了优化车辆路径问题(VRP)。
此外,为了满足实时功能的DMDVRP,最近添加法是用来处理在发生的新订单VRP问题的解决方案的基础上的某个时间片段。
最后,计算的17个基准问题报告给验证IACO基于距离的聚类方法更适合解决DMDVRP。
关键词:动态多车场车辆路径问题;基于距离的聚类方法;蚁群优化;最近添加法1.引言在过去的50年中,已经有很多的研究(1993年奥斯曼雷诺,拉波特,1996年Boctor Bullnheimer ,哈特尔和施特劳斯1999年,2004年贝尔和麦克马伦;俞,阳,和姚明2009年)车辆路径问题(VRP )或多车场车辆路径问题(MDVRP )。
许多聚类技术应用于分成几个较小的VRP的问题分解VRP / MDVRP的(比安斯托克,布拉梅尔,辛奇- 利维1993 ;栋多和2007年CERDA ;甚和Narendran2007年,金,刘,2007年和鲍登; Sáez研究,科尔特斯,2008年和努涅斯)。
在古典VRP / MDVRP的中,客户的需求/地点一般都假设为已知和确定性。
然而,在实践中,VRP / MDVRP的问题是动态的,不确定的。
随着国民经济的快速发展的新信息和通信技术在交通运输系统中,越来越多的关注专注于动态车辆路径问题(DVRP )。
近年来,一些研究者研究动态单车场VRP 。
Savelsbergh和Sol (1998)提出了一个动态路径自主车型的问题,其重点是一个分支和价格的算法。
动态车辆路径问题模型与优化算法的开题报告一、研究背景随着交通网络不断扩展和城市化程度的加深,交通流量的快速增长,交通拥堵已成为城市生活中的一个普遍问题。
此时,动态车辆路径问题(Dynamic Vehicle Routing Problem, DVRP)作为最基本、最核心的运输问题之一,越来越得到交通规划和管理领域的关注。
DVRP是指在一个动态环境中,为一批客户安排最优的配送路径和调度方案,以使得运输成本达到最小化。
DVRP的求解对许多商业和公共部门都有着重要的意义,如生产调度、快递配送、军事物流等。
二、研究目标本文旨在研究动态车辆路径问题的优化算法,主要包括以下研究目标:1.设计一个DVRP模型,考虑多个时间窗口、多个车辆和多个目标地点。
2.针对所设计的DVRP模型,提出多种求解DVRP问题的优化算法。
3.通过实验研究,比较不同的优化算法的效果,找出最优解。
三、研究内容1.综述DVRP问题及其主要研究方法,分析相关文献,探讨其优化难点。
2.设计基于遗传算法和模拟退火算法的DVRP优化模型,分析模型求解的时间复杂度和准确性,并进行实验验证。
3.设计基于分支定界法和粒子群优化算法的DVRP优化模型,比较各种算法的效果,并进行实验验证。
4.从结果上加以比较,并对最佳算法进行改进,以获得更好的性能。
四、研究方法1.文献研究法。
对DVRP问题的背景、历史、研究现状等进行深入了解。
2.算法设计法。
提出基于遗传算法、模拟退火算法、分支定界法和粒子群优化算法的DVRP优化模型,实现代码开发。
3.实验研究法。
比较不同算法的效果,在多个数据集上进行计算实验并分析结果。
五、论文结构安排本文预计分为引言、研究背景和意义、DVRP模型设计、优化算法设计、实验验证、结果分析与讨论、结论等七个部分。
其中:1.引言:介绍研究原因、研究现状、本文的研究目的和研究方法。
2.研究背景和意义:对DVRP问题的相关知识,及其在实际应用中的重要性进行介绍。
动态路径规划的算法改进研究摘要:动态路径规划是一种重要的研究领域,它在许多现实生活中应用广泛,如智能交通系统、无人机导航等。
本研究旨在通过改进算法,提高动态路径规划的效率和准确性。
具体而言,我们关注于四个方面的改进:路径选择策略、信息收集与更新、冲突处理以及实时优化。
通过对这四个方面的研究,我们希望能够为动态路径规划算法的改进提供一些新的思路和方法。
1. 引言动态路径规划是指在给定的环境中,根据实时的交通信息和其他相关因素,为用户提供最佳的路径选择方案。
动态路径规划的目标是使得用户能够以最短的时间和最低的成本到达目的地。
然而,在现实生活中,交通状况的变化不可预测,因此传统的路径规划算法往往无法满足实时优化的需求。
因此,研究人员们开始关注如何改进动态路径规划算法,以提高准确性和效率。
2. 路径选择策略的改进在传统的路径规划算法中,常采用最短路径算法,例如Dijkstra算法和A*算法。
然而,这些算法只考虑了路径长度,而忽略了其他因素。
因此,在实践中,常常会出现拥堵的情况。
为了解决这个问题,我们可以引入交通流量等因素,建立一种新的路径选择策略。
例如,可以基于实时交通信息,建立交通流量模型,以找到最优解。
同时,还可以考虑其他因素,如道路质量和用户自定义的偏好等。
3. 信息收集与更新动态路径规划算法的准确性依赖于实时的信息收集与更新。
传统的方法往往通过传感器或者交通局提供的数据来获得交通信息。
然而,这些数据往往不够准确和实时。
为了改进信息的收集过程,我们可以利用车辆上搭载的传感器来实时采集交通信息。
另外,还可以通过无人机和摄像头等设备进行数据采集。
一旦收集到新的信息,需要及时对算法进行更新,以获得更准确的路径规划结果。
4. 冲突处理机制在动态路径规划过程中,经常会出现多辆车同时选择同一条道路,导致拥堵和延误。
为了解决这个问题,我们可以引入冲突处理机制,以协调车辆的行驶顺序。
这可以通过引入优先级规则来实现,例如,让紧急车辆有限通过。
车辆路径优化问题综述随着各行业的不断发展,物流运输的重要性也越来越凸显。
而车辆路径优化问题则是物流运输中的一个重要问题,它的解决程度直接关系到物流运输的效率、成本和质量。
本文将从车辆路径优化问题的定义、分类、模型及求解方法等方面进行综述。
一、车辆路径优化问题的定义车辆路径优化问题是指在给定的路网和配送需求下,通过合理的路径规划和调度,使得车辆的行驶距离、时间和成本等指标最小化的问题。
这个问题的本质是一个组合优化问题,需要在满足各种约束条件的前提下,寻找最优解。
二、车辆路径优化问题的分类根据车辆路径优化问题的特点和应用领域,可以将其分为多种不同的类型。
其中,常见的分类方式包括:1. 静态路径优化问题:在给定的路网和配送需求下,确定车辆的路径规划和调度,使得车辆的行驶距离、时间和成本等指标最小化。
这种问题的特点是路网和需求量都是固定的,不存在随时间变化的情况。
2. 动态路径优化问题:在给定的路网和配送需求下,根据实时的交通状况和需求变化,对车辆的路径规划和调度进行优化,使得车辆的行驶距离、时间和成本等指标最小化。
这种问题的特点是路网和需求量都是不断变化的,需要实时调整路径规划和调度。
3. 车辆路径优化问题的应用领域:物流配送、公共交通、城市物流、航空物流等。
三、车辆路径优化问题的模型为了解决车辆路径优化问题,需要建立相应的数学模型。
常用的模型包括:1. TSP模型:TSP(Traveling Salesman Problem,旅行商问题)是一类经典的路径优化问题,是最基本的车辆路径优化问题。
TSP模型的目标是确定一条经过所有需求点的最短路径,使得所有需求点都被访问且仅被访问一次。
2. VRP模型:VRP(Vehicle Routing Problem,车辆路径问题)是一种更为复杂的车辆路径优化问题,它考虑了多个车辆的调度和路径规划。
VRP模型的目标是确定多个车辆的路径规划和调度,使得所有需求点都被访问且仅被访问一次,同时最小化车辆行驶的距离、时间和成本等指标。
智能交通系统中的车辆动态路径规划优化智能交通系统是运用先进的信息技术和智能化设备,对城市交通进行集成管理和控制的系统。
随着交通问题愈发突出,智能交通系统的发展已经成为解决交通拥堵、提高交通效率的重要手段之一。
在智能交通系统中,车辆动态路径规划优化是一个关键的问题,能够有效地提高交通系统的效率和安全性。
车辆动态路径规划优化是指在交通网络中,根据当前交通情况和需求,为车辆选择最佳行驶路径的过程。
传统的路径规划方法通常只考虑固定的路况和交通状况,无法适应实时变化的交通环境。
而智能交通系统中,借助先进的传感器技术、无线通信技术和数据处理能力,可以实时获取路况、交通信息和车辆需求等数据,从而为车辆提供更加精准、实时的路径规划。
在车辆动态路径规划优化中,需要考虑的因素非常多。
首先,交通状况是决定路径选择的关键因素之一。
通过实时监测交通信号、道路流量和拥堵情况,可以为车辆选择避开拥堵区域、缩短行驶时间的路径。
其次,车辆的需求也需要考虑进去。
例如,如果车辆需要在规定时间内到达目的地,路径规划系统可以根据车辆的出发时间和目的地的距离选择最优路径。
此外,还可以考虑车辆的燃油消耗、车辆类型和路段限速等因素,以提供更加全面和个性化的路径规划。
为了实现车辆动态路径规划优化,需要借助强大的计算和数据处理能力。
首先,交通系统需要收集大量的数据,包括车辆的实时位置、速度、加速度等信息,以及路况、交通信号等数据。
这些数据可以通过传感器和车载设备进行采集,并传输到交通管理中心进行处理。
其次,交通管理中心需要利用这些数据进行交通流预测和路径规划优化。
通过分析和建模交通数据,可以预测未来的交通状况,并基于此为车辆选择最佳路径。
最后,交通管理中心将优化后的路径信息传输给车辆,通过车载导航系统指导车辆行驶。
在实际应用中,车辆动态路径规划优化可以显著提高交通系统的效率和安全性。
首先,通过动态规划,可以避免车辆过度拥堵在某一条道路上,分散交通流量,减少拥堵现象。
智能交通系统中的车辆动态路径规划算法随着城市交通拥堵问题的日益严重,智能交通系统引起了广泛的关注和研究。
车辆动态路径规划是智能交通系统中的关键技术之一。
它通过分析路况信息和车辆需求,为车辆提供最优的路径方案,以提高交通效率,并减少车辆行驶时间和能源消耗。
本文将介绍智能交通系统中的车辆动态路径规划算法,重点讨论最短路径算法、最佳路径算法和实时路径算法。
最短路径算法是最基本的路径规划算法之一。
它通过计算路径长度来确定最短路径,即选择路径上的节点之间的最短距离。
最短路径算法在智能交通系统中具有广泛的应用,例如导航系统、快递配送系统等。
其中,迪杰斯特拉算法和弗洛伊德算法是两种常用的最短路径算法。
迪杰斯特拉算法是一种贪心算法,通过从起点开始,逐步选择当前最短路径,更新路径长度,直到到达目标节点。
该算法的时间复杂度为O(n^2),其中n为节点数。
弗洛伊德算法是一种动态规划算法,通过比较任意两个节点之间的路径长度,逐步更新最短路径,直到更新完所有节点的路径长度。
该算法的时间复杂度为O(n^3),其中n为节点数。
这两种算法都能有效地计算出车辆的最短路径,但在大规模数据下,弗洛伊德算法的效率较低。
除了最短路径算法,最佳路径算法也能满足特定的需求。
最佳路径算法不仅考虑路径长度,还考虑其他因素,如路况、车流量、工作时间等,以提供用户最佳的路径方案。
最佳路径算法通过使用启发式搜索算法、遗传算法等方法,综合多个因素来确定最佳路径。
例如,A*算法是一种基于启发式搜索的最佳路径算法,它通过对节点进行估值,通过选择估值最小的节点来搜索路径。
遗传算法是一种模拟进化过程的优化算法,通过生成多个个体,通过选择、交叉和变异等操作,逐步优化路径。
这些最佳路径算法能够更好地满足车辆的需求,提供更加智能和个性化的路径方案。
实时路径算法是在最短路径算法和最佳路径算法的基础上进行了进一步的改进。
实时路径算法通过实时获取和分析路况信息,根据实时交通状况进行路径规划。