STM32学习笔记之三_定时器中断
- 格式:pdf
- 大小:376.70 KB
- 文档页数:19
stm32定时器初始化后⾃动进⼊⼀次中断问题今天在调试定时器时,定时器3出现了⾃动停⽌⼯作的问题,中断设置是每过⼀秒,进⼀次中断,相应标志位+1,然后每次都是在标志位=4时停⽌⼯作,但是有时候⼜能正常⼯作,暂时未解决。
在调试时,发现⼀个有趣的现象,本次项⽬我同时配置了定时器4,初始化后是DISABLE未使能状态,但是开始运⾏,定时器还是会进⼀次中断,相应的标志位+1,后⾯不能继续增加。
motor_run_time这个标志位在程序启动后会进⼀次中断导致+1,⽽我的定时器并未使能。
我的相关代码是初始化部分代码:TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE); //允许定时器4更新中断TIM_Cmd(TIM4, DISABLE); //关闭定时器4//定时器4中断服务函数void TIM4_IRQHandler(void){if (TIM_GetITStatus(TIM4, TIM_IT_Update) != RESET) //溢出中断{motor_run_time++;}TIM_ClearITPendingBit(TIM4, TIM_IT_Update); //清除中断标志位}增加部分: TIM_ClearITPendingBit(TIM4, TIM_IT_Update); //清除中断标志位TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE); //允许定时器4更新中断TIM_Cmd(TIM4, DISABLE); //关闭定时器4//定时器4中断服务函数void TIM4_IRQHandler(void){if (TIM_GetITStatus(TIM4, TIM_IT_Update) != RESET) //溢出中断{motor_run_time++;}TIM_ClearITPendingBit(TIM4, TIM_IT_Update); //清除中断标志位}。
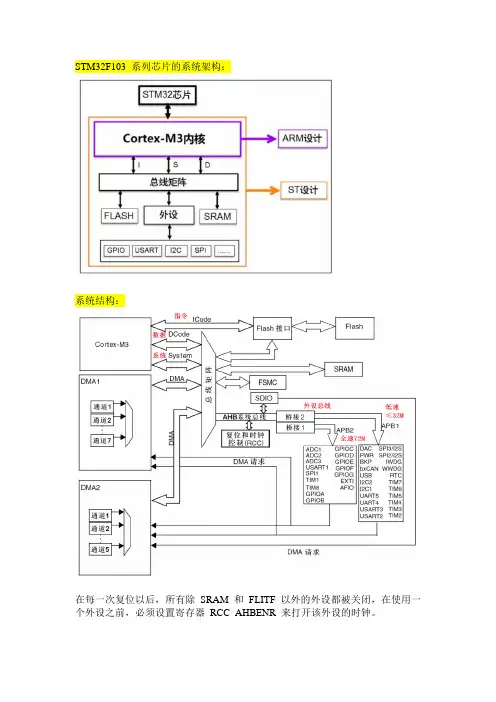
STM32F103 系列芯片的系统架构:系统结构:在每一次复位以后,所有除SRAM 和FLITF 以外的外设都被关闭,在使用一个外设之前,必须设置寄存器RCC_AHBENR 来打开该外设的时钟。
GPIO 输入输出,外部中断,定时器,串口。
理解了这四个外设,基本就入门了一款MCU。
时钟控制RCC:-4~16M 的外部高速晶振-内部8MHz 的高速RC 振荡器-内部40KHz低速RC 振荡器,看门狗时钟-内部锁相环(PLL,倍频),一般系统时钟都是外部或者内部高速时钟经过PLL 倍频后得到- 外部低速32.768K 的晶振,主要做RTC 时钟源ARM存储器映像:数据字节以小端格式存放在存储器中。
一个字里的最低地址字节被认为是该字的最低有效字节,而最高地址字节是最高有效字节。
存储器映像与寄存器映射:ARM 存储器映像4GB0X0000 00000X1FFF FFFF0X2000 00000X3FFF FFFF0X4000 00000X5FFF FFFF寄存器名称相对外设基地址的偏移值编号位表读写权限寄存器位功能说明使用C语言封装寄存器:1、总线和外设基地址封装利用地址偏移(1)定义外设基地址(Block2 首地址)(2)定义APB2总线基地址(相对外设基地址偏移固定)(3)定义GPIOX外设基地址(相对APB2总线基地址偏移固定)(4)定义GPIOX寄存器地址(相对GPIOX外设基地址偏移固定)(5)使用 C 语言指针操作寄存器进行读/写//定义外设基地址#define PERIPH_BASE ((unsigned int)0x40000000) 1)//定义APB2 总线基地址#define APB2PERIPH_BASE (PERIPH_BASE + 0x00010000) 2)//定义GPIOC 外设基地址#define GPIOC_BASE (AHB1PERIPH_BASE + 0x0800) 3)//定义寄存器基地址这里以GPIOC 为例#define GPIOC_CRL *(unsigned int*)(GPIOC_BASE+0x00) 4)#define GPIOC_CRH *(unsigned int*)(GPIOC_BASE+0x04)#define GPIOC_IDR *(unsigned int*)(GPIOC_BASE+0x08)#define GPIOC_ODR *(unsigned int*)(GPIOC_BASE+0x0C)#define GPIOC_BSRR *(unsigned int*)(GPIOC_BASE+0x10)#define GPIOC_BRR *(unsigned int*)(GPIOC_BASE+0x14)#define GPIOC_LCKR *(unsigned int*)(GPIOC_BASE+0x18)//控制GPIOC 第0 管脚输出一个低电平5)GPIOC_BSRR = (0x01<<(16+0));//控制GPIOC 第0 管脚输出一个高电平GPIOC_BSRR = (0x01<<0);2、寄存器封装利用结构体、外设基地址和寄存器地址偏移typedef unsigned int uint32_t; /*无符号32 位变量*/typedef unsigned short int uint16_t; /*无符号16 位变量*//* GPIO 寄存器列表*/typedef struct{uint32_t CRL; /*GPIO 端口配置低寄存器地址偏移: 0x00 */uint32_t CRH; /*GPIO 端口配置高寄存器地址偏移: 0x04 */uint32_t IDR; /*GPIO 数据输入寄存器地址偏移: 0x08 */uint32_t ODR; /*GPIO 数据输出寄存器地址偏移: 0x0C */uint32_t BSRR; /*GPIO 位设置/清除寄存器地址偏移: 0x10 */uint32_t BRR; /*GPIO 端口位清除寄存器地址偏移: 0x14 */uint16_t LCKR; /*GPIO 端口配置锁定寄存器地址偏移: 0x18 */}GPIO_TypeDef;只要给结构体设置好首地址,就能把结构体内成员的地址确定下来,然后就能以结构体的形式访问寄存器。
STM32定时器(TIM1、TIM2、TIM3、TIM4、TIM5、TIM8)⾼级定时器+。
2.1 时钟来源计数器时钟可以由下列时钟源提供:·内部时钟(CK_INT)·外部时钟模式1:外部输⼊脚(TIx)·外部时钟模式2:外部触发输⼊(ETR)·内部触发输⼊(ITRx):使⽤⼀个定时器作为另⼀个定时器的预分频器,如可以配置⼀个定时器Timer1⽽作为另⼀个定时器Timer2的预分频器。
由于今天的学习是最基本的定时功能,所以采⽤内部时钟。
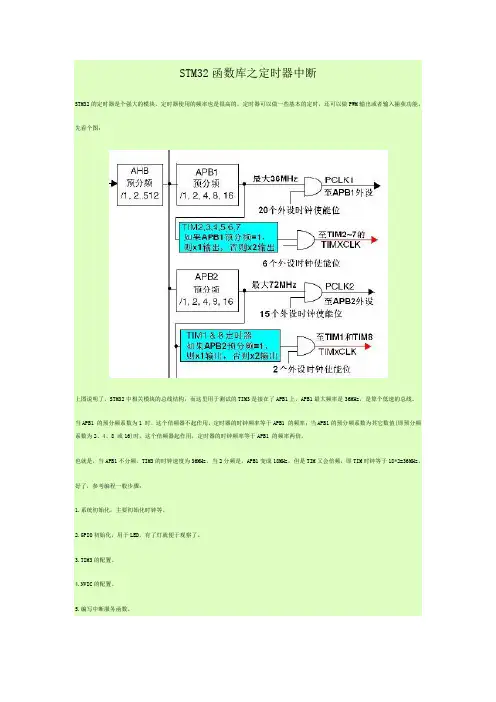
TIM2-TIM5的时钟不是直接来⾃于APB1,⽽是来⾃于输⼊为APB1的⼀个倍频器。
这个倍频器的作⽤是:当APB1的预分频系数为1时,这个倍频器不起作⽤,定时器的时钟频率等于APB1的频率(36MHZ);当APB1的预分频系数为其他数值时(即预分频系数为2、4、8或16),这个倍频器起作⽤,定时器的时钟频率等于APB1的频率的2倍。
{假如APB1预分频为2(变成36MHZ),则定时器TIM2-5的时钟倍频器起作⽤,将变成2倍的APB1(2x36MHZ)将为72MHZ给定时器提供时钟脉冲。
⼀般APB1和APB2的RCC时钟配置放在初始化函数中例如下⾯的void RCC_Configuration(void)配置函数所⽰,将APB1进⾏2分频,导致TIM2时钟变为72MHZ输⼊。
如果是1分频则会是36MHZ输⼊,如果4分频:CKINT=72MHZ/4x2=36MHZ; 8分频:CKINT=72MHZ/8x2=18MHZ;16分频:CKINT=72MHZ/16x2=9MHZ}//系统时钟初始化配置void RCC_Configuration(void){//定义错误状态变量ErrorStatus HSEStartUpStatus;//将RCC寄存器重新设置为默认值RCC_DeInit();//打开外部⾼速时钟晶振RCC_HSEConfig(RCC_HSE_ON);//等待外部⾼速时钟晶振⼯作HSEStartUpStatus = RCC_WaitForHSEStartUp();if(HSEStartUpStatus == SUCCESS){//设置AHB时钟(HCLK)为系统时钟RCC_HCLKConfig(RCC_SYSCLK_Div1);//设置⾼速AHB时钟(APB2)为HCLK时钟RCC_PCLK2Config(RCC_HCLK_Div1);//设置低速AHB时钟(APB1)为HCLK的2分频(TIM2-TIM5输⼊TIMxCLK频率将为72MHZ/2x2=72MHZ输⼊)RCC_PCLK1Config(RCC_HCLK_Div2);//设置FLASH代码延时FLASH_SetLatency(FLASH_Latency_2);//使能预取指缓存FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);//设置PLL时钟,为HSE的9倍频 8MHz * 9 = 72MHzRCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);//使能PLLRCC_PLLCmd(ENABLE);//等待PLL准备就绪while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET);//设置PLL为系统时钟源RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);//判断PLL是否是系统时钟while(RCC_GetSYSCLKSource() != 0x08);}//允许TIM2的时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//允许GPIO的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);}三、定时器代码实例中断优先级就不贴出来了,⾃⼰可以配置下Tout= ((arr+1)*(psc+1))/Tclk;arr:计数重装值,psc分频数,Tclk系统时钟频率,Tout⼀个周期的时间。
STM32-定时器中断实现⼀、⼯具 1、硬件:STM32L053R8单⽚机(HAL库) 2、编译环境:Atollic TrueSTUDIO for STM32 9.3.0 3、辅助⼯具:STM32CubeMX⼆、单⽚机系统时钟配置 1、系统时钟配置(没有显⽰的默认),这⾥选择的是内部的⾼速时钟(HSI)作为时钟源,系统时钟频率配置到24MHz。
三、定时器配置 1、选⽤的定时器为TIM22,时钟源选择内部时钟,即24MHz,分频值为24(设置值为24-1),⾃动重装载值为1000(设置值为1000-1),得到该定时器的周期为(1000x24)/24000000 = 1ms。
2、使能定时器中断四、⽣成⼯程并进⾏完善 1、⼯程⽣成设置 2、完善代码 因为⽤到了定时器中断,在配置完定时器后,在定时器启动之前清除⼀下更新事件中断以防⽌中断提前触发(开启定时器中断后,每隔⼀个周期硬件就把定时器更新事件置1)。
/*** @brief TIM22 Initialization Function* @param None* @retval None*/static void MX_TIM22_Init(void){/* USER CODE BEGIN TIM22_Init 0 *//* USER CODE END TIM22_Init 0 */TIM_ClockConfigTypeDef sClockSourceConfig = {0};TIM_MasterConfigTypeDef sMasterConfig = {0};/* USER CODE BEGIN TIM22_Init 1 *//* 定时器设定的是1ms延时产⽣⼀次中断 *//* USER CODE END TIM22_Init 1 */htim22.Instance = TIM22;htim22.Init.Prescaler = 23;htim22.Init.CounterMode = TIM_COUNTERMODE_UP;htim22.Init.Period = 999;htim22.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;htim22.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;if (HAL_TIM_Base_Init(&htim22) != HAL_OK){Error_Handler();}sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;if (HAL_TIM_ConfigClockSource(&htim22, &sClockSourceConfig) != HAL_OK){Error_Handler();}sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;if (HAL_TIMEx_MasterConfigSynchronization(&htim22, &sMasterConfig) != HAL_OK){Error_Handler();}/* USER CODE BEGIN TIM22_Init 2 */__HAL_TIM_CLEAR_IT(&htim22, TIM_IT_UPDATE);/* USER CODE END TIM22_Init 2 */} 定时器中断响应后会调⽤⼀个回调函数,该函数的内容可以由⽤户⾃⼰添加(该函数为固定写法不能随意更改)。
stm32单片机设计定时器中断实现1s的led灯闪烁知识应用要实现1s的LED灯闪烁,可以使用STM32单片机的定时器中断来控制LED的开关。
以下是实现的步骤:1. 配置定时器:选择一个定时器(如TIM2)并设置适当的预分频和计数值,以实现1s的定时周期。
2. 配置中断:使能定时器中断,并将中断优先级设置为适当的值(较高优先级)。
3. 初始化LED引脚:将LED引脚设置为输出,并初始化为高电平(LED关闭)。
4. 编写中断处理程序:在中断处理程序(如TIM2_IRQHandler)中,切换LED引脚的状态。
例如,如果LED引脚当前为高电平,则将其设置为低电平,反之亦然。
5. 启动定时器:启动定时器以开始定时。
整个步骤如下所示的代码示例:```c#include "stm32fxx.h"void TIM2_IRQHandler(void){if(TIM2->SR & TIM_SR_UIF){TIM2->SR &= ~TIM_SR_UIF; // 清除中断标志位// 切换LED引脚状态if(GPIOC->ODR & GPIO_ODR_ODR0)GPIOC->ODR &= ~GPIO_ODR_ODR0; // 关闭LEDelseGPIOC->ODR |= GPIO_ODR_ODR0; // 打开LED}}int main(){// 初始化LED引脚RCC->AHB1ENR |= RCC_AHB1ENR_GPIOCEN; // 使能GPIOC时钟GPIOC->MODER |= GPIO_MODER_MODER0_0; // 将PC0设置为输出模式GPIOC->OSPEEDR |= GPIO_OSPEEDR_OSPEED0; // 设置PC0输出速度// 配置定时器RCC->APB1ENR |= RCC_APB1ENR_TIM2EN; // 使能TIM2时钟TIM2->PSC = 8399; // 将预分频设置为8400-1,得到10kHz 的计数频率TIM2->ARR = 9999; // 将计数值设置为10000-1,得到1s的定时周期// 配置中断TIM2->DIER |= TIM_DIER_UIE; // 使能更新中断NVIC_EnableIRQ(TIM2_IRQn); // 使能TIM2中断NVIC_SetPriority(TIM2_IRQn, 0); // 设置TIM2中断优先级为最高// 启动定时器TIM2->CR1 |= TIM_CR1_CEN; // 启动TIM2定时器while(1){// 程序主循环}return 0;}```以上代码使用了TIM2定时器和PC0引脚作为LED灯的控制。
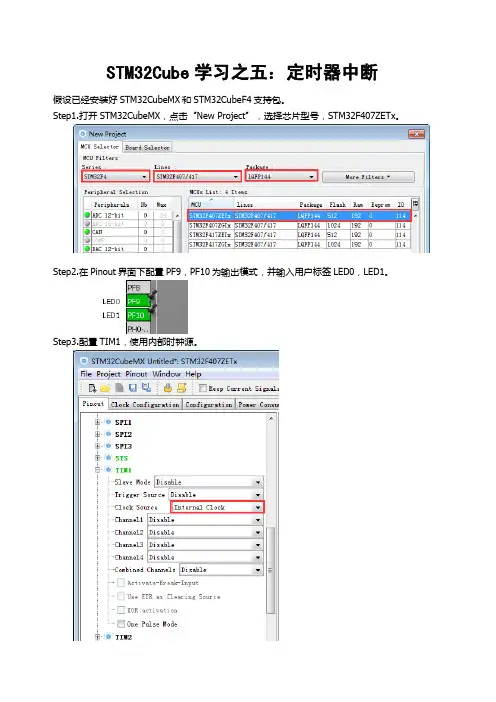
STM32Cube学习之五:定时器中断假设已经安装好STM32CubeMX和STM32CubeF4支持包。
Step1.打开STM32CubeMX,点击“New Project”,选择芯片型号,STM32F407ZETx。
Step2.在Pinout界面下配置PF9,PF10为输出模式,并输入用户标签LED0,LED1。
Step3.配置TIM1,使用内部时钟源。
Step4.配置时钟树,在此使用默认值,16MHz。
Step5.配置TIM1参数和GPIO的参数。
在configuration界面中点击TIM1按钮,可以进入参数配置界面。
在Parameter Settings页配置预分频系数为15999,计数周期(自动加载值)为999,定时器溢出频率就是16MHz/(15999+1)/(999+1) = 1Hz。
在NVIC页面使能TIM1的更新中断。
在configuration界面中点击GPIO按钮,配置GPIO的上拉电阻。
在此GPIO配置默认即可。
Step6.生成源代码。
点击生成源代码按钮。
在设置界面中输入工程名,保存路径,工程IDE类型,点OK即可。
生成代码完成后可直接打开工程。
弹出如下对话框时,如果已经安装了F4的支持包,则点击OK关闭。
如果没有安装,则点击界面中的/...链接,找到芯片的支持包,然后安装。
关闭后面的界面。
点击“是”,然后选择芯片型号。
可以在搜索框中输入关键字,加快选择速度。
Step7.添加功能代码。
在main文件/* USER CODE BEGIN 4 */和/* USER CODE END 4 */注释之间加入下面代码。
在main函数的while(1)之前启动TIM1并使能其中断功能。
至此,完成整个工程。
编译下载,现象就是LED0和LED1同步循环闪烁,亮1秒灭1秒。
特别说明:CubeMX生成的MDK工程已经包含了配置中用到的外设相关文件,如下图:打开stm32f4xx_hal_tim.c,并点击右键,选择相应条目即可打开stm32f4xx_hal_tim.h文件,在HAL_开头的函数中,找到使能定时器中断的函数,如下图:定时器周期中断回调函数,在1304行。
定时器中断的应用原理总结什么是定时器中断定时器是一种用来测量和控制时间间隔的设备。
定时器中断是指当定时器计时到达预设时间时,系统会触发一个中断请求,从而使程序执行特定的中断处理函数。
在嵌入式系统中,定时器中断被广泛应用于各种场景,例如任务调度、实时数值采集、通信协议处理等。
定时器中断的工作原理时钟源选择在使用定时器中断之前,需要首先选择一个适合的时钟源。
嵌入式系统中通常使用系统时钟或者外部晶体振荡器作为时钟源。
预设定时器计数初值定时器中断的触发是基于定时器计数器的计数值。
在使用定时器中断之前,需要预设定时器计数初值,即定时器计数器从哪个值开始计数。
预设定时器中断时间定时器中断的触发时间通过预设定时器中断时间来确定。
根据嵌入式系统的需求,可将定时器中断设置为周期性触发,或者仅触发一次。
中断服务函数当定时器中断被触发时,系统会自动进入中断服务函数处理中断。
中断服务函数是一段特殊的代码,用来响应中断请求,执行特定的任务或操作。
中断优先级设置在嵌入式系统中,经常会同时使用多个定时器中断。
为了避免不同中断之间的冲突,需要设置中断的优先级。
一般情况下,越重要的中断优先级越高。
定时器中断的应用场景嵌入式操作系统中的任务调度在嵌入式操作系统中,任务调度是实现多个任务协同运行的重要机制之一。
定时器中断可用于触发任务调度,当定时器计数到达预设时间时,引发任务切换,切换到下一个任务的执行。
实时数值采集在实时数值采集场景中,需要按照一定的频率对传感器进行采样。
定时器中断可用于定时触发采样操作,确保采样频率的准确性和稳定性。
通信协议处理通信协议处理是嵌入式系统中的一项重要任务。
定时器中断可用于定时检测接收到的数据,并触发相应的处理函数,实现通信协议的解析和执行。
时钟显示定时器中断可用于实现时钟显示功能,定时触发更新显示的时分秒。
定时器中断的优势和注意事项优势•精确控制时间间隔:定时器中断可实现精确的时间控制,适用于对时间精度要求较高的场景。
stm32中断学习总结经过了两天,终于差不多能看懂32的中断了,由于是⽤的库函数操作的,所以有些内部知识并没有求甚解,只是理解知道是这样的。
但对于要做简单开发的我来说这些已经够了。
我学习喜欢从⼀个例程来看,下⾯的程序是我粘贴但是改编的,⼤部分都做了注释。
其实主要步骤就是:1、将GPIO⼝配置成中断输⼊模式。
void Init_LED(void){GPIO_InitTypeDef GPIO_InitStructure; //定义⼀个GPIO结构体变量RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC | RCC_APB2Periph_GPIOD | RCC_APB2Periph_GPIOE |RCC_APB2Periph_GPIOG, ENABLE);//使能各个端⼝时钟,GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14; //板上LED编号 D2GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOG, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13; //板上LED编号 D5GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOD, &GPIO_InitStructure);}2、这个例程是做的按键,就是你要哪个地⽅产⽣中断,然后将其所在的总线配置成中断源,然后照猫画虎,填写中断结构体成员,就是配置外部事件的模式、触发条件、使能外部触发,但是别忘了打开复⽤功能(现在我还不理解)void Init_TI_KEY(void){EXTI_InitTypeDef EXTI_InitStructure; //定义⼀个EXTI结构体变量RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //使能IO复⽤功能,使⽤中断功能重要/* 引脚选择 */GPIO_EXTILineConfig(GPIO_PortSourceGPIOC, GPIO_PinSource13);//配置端⼝C的13引脚为中断源重要!!板上标号INT2GPIO_EXTILineConfig(GPIO_PortSourceGPIOE, GPIO_PinSource0); //配置端⼝E的0引脚为中断源重要!!板上标号INT1/* 设置外部中断结构体的成员*/EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //中断模式为中断模式EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; //下降沿触发EXTI_InitStructure.EXTI_Line = EXTI_Line0 | EXTI_Line13;EXTI_InitStructure.EXTI_LineCmd = ENABLE; //使能中断线EXTI_Init(&EXTI_InitStructure); //根据参数初始化中断寄存器}3、现在就该配置中断了。
stm32 定时器中断配置
stm32 中断
stm32 的Cortex 内核具有强大的异常响应系统,它把能够打断当前代码执行流程的事件分为异常(excepTIon)和中断(terryp),并把它们用二个表管理起来,编号为0~15 的称为内核异常,而16 以上的则称为外部中断(外,相对内核而言),这个表就称为中断向量表。
而STM32 对这个表重新进行了编排,把编号从-3 至6 的中断向量定义为系统异常,编号为负的内核异常不能被设置优先级,如复位(Reset)、不可屏蔽中断(NMI)、硬错误(Hardfault)。
从编号7 开始的为外部中断,这些中断的优先级都是可以自行设置的。
STM32 的中断如此之多,配置起来并不容易,因此,我们需要一个
强大而方便的中断控制器NVIC,NVIC 是属于Cortex 内核的器件。
stm32 中断配置
配置STM32 的中断只需要理解2 个内容,配置4 个变量即可。
(stm32f103学习总结)—stm32定时器中断⼀、定时器介绍 STM32F1的定时器⾮常多,由2个基本定时器(TIM6、TIM7)、4个通 ⽤定时器(TIM2-TIM5)和2个⾼级定时器(TIM1、TIM8)组成。
基本定 时器的功能最为简单,类似于51单⽚机内定时器。
通⽤定时器是在基本 定时器的基础上扩展⽽来,增加了输⼊捕获与输出⽐较等功能。
⾼级定 时器⼜是在通⽤定时器基础上扩展⽽来,增加了可编程死区互补输出、 重复计数器、带刹车(断路)功能,这些功能主要针对⼯业电机控制⽅⾯1.1 通⽤定时器简介 STM32F1的通⽤定时器包含⼀个 16 位⾃动重载计数器(CNT),该计 数器由可编程预分频器(PSC)驱动。
STM32F1的通⽤定时器可⽤于多种 ⽤途,包括测量输⼊信号的脉冲宽度(输⼊捕获)或者⽣成输出波形(输出 ⽐较和PWM)等。
使⽤定时器预分频器和 RCC 时钟控制器预分频器,脉 冲长度和波形周期可以在⼏个微秒到⼏个毫秒间调整。
STM32F1 的每个 通⽤定时器都是完全独⽴的,没有互相共享的任何资源。
STM32F1的通⽤定时器TIMx (TIM2-TIM5 )具有如下功能:(1)16 位向上、向下、向上/向下⾃动装载计数器(TIMx_CNT)。
(2)16 位可编程(可以实时修改)预分频器(TIMx_PSC),计数器时钟频率的分频系数为 1~65535之间的任意数值。
(3)4个独⽴通道(TIMx_CH1-4),这些通道可以⽤来作为: A.输⼊捕获 B.输出⽐较 C. PWM ⽣成(边缘或中间对齐模式) D.单脉冲模式输出(4)可使⽤外部信号(TIMx_ETR)控制定时器,且可实现多个定时器互连(可以⽤1个定时器控制另外⼀个定时器)的同步电路。
(5)发⽣如下事件时产⽣中断/DMA请求: A.更新:计数器向上溢出/向下溢出,计数器初始化(通过软件或者内部/外部触发) B.触发事件(计数器启动、停⽌、初始化或者由内部/外部触发计数) C.输⼊捕获 D.输出⽐较(6)⽀持针对定位的增量(正交)编码器和霍尔传感器电路(7)触发输⼊作为外部时钟或者按周期的电流管理1.2 通⽤定时器结构框图我们把通⽤定时器结构框图分成 5 个⼦模块,按照顺序依次进⾏简单介绍。
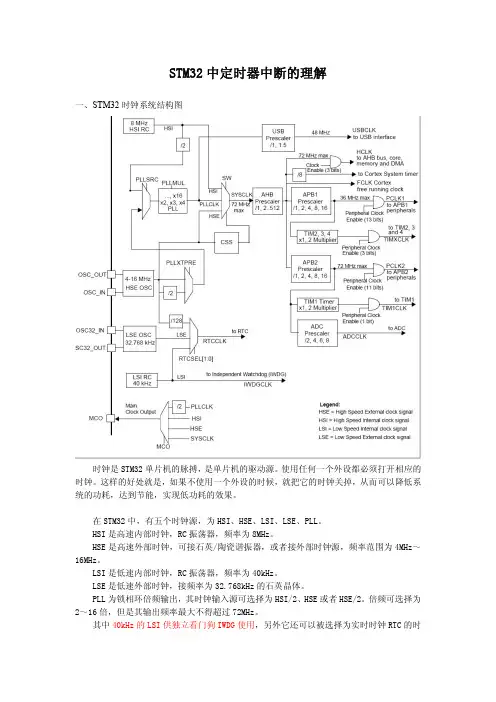
STM32学习笔记(3):系统时钟和SysTick定时器1.STM32的时钟系统在STM32中,一共有5个时钟源,分别是HSI、HSE、LSI、LSE、PLL(1)HSI是高速内部时钟,RC振荡器,频率为8MHz;(2)HSE是高速外部时钟,可接石英/陶瓷谐振器,或者接外部时钟源,频率范围是4MHz – 16MHz;(3)LSI是低速内部时钟,RC振荡器,频率为40KHz;(4)LSE是低速外部时钟,接频率为32.768KHz的石英晶体;(5)PLL为锁相环倍频输出,严格的来说并不算一个独立的时钟源,PLL 的输入可以接HSI/2、HSE或者HSE/2。
倍频可选择为2 – 16倍,但是其输出频率最大不得超过72MHz。
其中,40kHz的LSI供独立看门狗IWDG使用,另外它还可以被选择为实时时钟RTC的时钟源。
另外,实时时钟RTC的时钟源还可以选择LSE,或者是HSE的128分频。
STM32中有一个全速功能的USB模块,其串行接口引擎需要一个频率为48MHz的时钟源。
该时钟源只能从PLL端获取,可以选择为1.5分频或者1分频,也就是,当需使用到USB模块时,PLL必须使能,并且时钟配置为48MHz 或72MHz。
另外STM32还可以选择一个时钟信号输出到MCO脚(PA.8)上,可以选择为PLL输出的2分频、HSI、HSE或者系统时钟。
系统时钟SYSCLK,它是提供STM32中绝大部分部件工作的时钟源。
系统时钟可以选择为PLL输出、HSI、HSE。
系系统时钟最大频率为72MHz,它通过AHB分频器分频后送给各个模块使用,AHB分频器可以选择1、2、4、8、16、64、128、256、512分频,其分频器输出的时钟送给5大模块使用:(1)送给AHB总线、内核、内存和DMA使用的HCLK时钟;(2)通过8分频后送给Cortex的系统定时器时钟;(3)直接送给Cortex的空闲运行时钟FCLK;(4)送给APB1分频器。
STM32CubeMX实战教程(三)——外部中断(中断及HAL_Delay函数避坑)在STM32CubeMX实战教程中,我们已经学习了如何使用GPIO来控制LED的亮灭。
在这篇文章中,我们将进一步学习如何使用外部中断来实现更复杂的功能。
外部中断可以使我们的微控制器能够在输入发生变化时立即做出响应。
这对于需要实时性的应用非常重要,比如按钮的按下或松开的检测。
外部中断类似于计数器,不断地检测输入引脚的变化,并在变化时触发中断。
在STM32CubeMX中配置外部中断非常简单。
我们只需要选择外部输入引脚作为中断源,然后为中断配置触发方式即可。
触发方式可以是上升沿、下降沿或双边沿触发。
但要注意的是,当使用外部中断时,我们应该避免在中断服务子程序(ISR)中使用延时函数,如HAL_Delay。
这是因为在ISR中调用延时函数会导致中断响应时间增加,从而影响其他中断的响应和整个系统的实时性。
所以在ISR中,我们只能执行最核心、最迅速的操作。
为了避免在ISR中使用延时函数,我们可以使用定时器中断来实现延时。
定时器中断是一种定期触发的中断,在ISR中我们可以通过判断定时器的计数值来实现一定时间的延时。
下面是一个使用外部中断的示例代码:```c#include "stm32f4xx_hal.h"GPIO_InitTypeDef GPIO_InitStruct;EXTI_HandleTypeDef hexti;void SysTick_Handler(void)HAL_IncTick(;HAL_SYSTICK_IRQHandler(;void EXTI_IRQHandler(void)HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0);void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) //在这里执行最核心、最迅速的操作int main(void)HAL_Init(;SystemClock_Config(;__HAL_RCC_GPIOA_CLK_ENABLE(;__HAL_RCC_SYSCFG_CLK_ENABLE(;GPIO_InitStruct.Pin = GPIO_PIN_0;GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING; GPIO_InitStruct.Pull = GPIO_PULLDOWN;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);HAL_NVIC_SetPriority(EXTI0_IRQn, 0, 0);HAL_NVIC_EnableIRQ(EXTI0_IRQn);while (1)//在这里执行其他操作}```在这个示例中,我们使用PA0引脚,即用户按钮作为外部中断源。