气动系统行程程序控制设计
- 格式:ppt
- 大小:1.02 MB
- 文档页数:40
气动系统设计的主要内容及设计程序气动系统设计的主要内容及设计程序3.1明确工作要求1)运动和操作力的要求?如主机的动作顺序、动作时间、运动速度及其可调范围、运动的平稳性、定位精度、操作力及联锁和自动化程序等。
2)工作环境条件如温度、防尘、防爆、防腐蚀要求及工作场地的空间等情况必须调查清楚。
3)和机、电、液控制相配合的情况,及对气动系统的要求。
3.2设计气控回路1)列出气动执行元件的工作程序图。
2)画信号动作状态线图或卡诺图、扩大卡诺图,也可直接写出逻辑函数表达式。
3)画逻辑原理图。
4)画回路原理图。
5)为得到最佳的气控回路,设计时可根据逻辑原理图,做出几种方案进行比较,如对气控制、电-气控制、逻辑元件等控制方案进行合理的选定。
3.3选择、设计执行元件其中包括确定气缸或气马达的类型、气缸的安装形式及气缸的具体结构尺寸(如缸径、活塞杆直径、缸壁厚)和行程长度、密封形式、耗气量等。
设计中要优先考虑选用标准缸的参数。
3.4选择控制元件1)确定控制元件类型,要根据表42.6-13进行比较而定。
表42.6-13?几种气控元件选用比较表电磁气阀控制气控气阀控制气控逻辑元件控制安全可靠性较好(交流的易烧线圈)较好较好恶劣环境适应性(易燃、易爆、潮湿等)较差较好较好气源净化要求一般一般一般远距离控制性,速度传递好,快一般,>0几毫秒一般,几毫秒~0几毫秒控制元件体积一般大较小元件无功耗气量很小很小小元件带负载能力高高较高价格稍贵一般便宜2)确定控制元件的通径,一般控制阀的通径可按阀的工作压力与最大流量确定。
由表42.6-14初步确定阀的通径,但应使所选的阀通径尽量一致,以便于配管。
至于逻辑元件的类型选定后,它们的通径也就定了(逻辑元件通径常为ф3mm,个别为ф1mm)。
对于减压阀或定值器的选择还必须考虑压力调节范围而确定其不同的规格。
3.5选择气动辅件1)分水滤气器其类型主要根据过滤精度要求而定。
一般气动回路、截止阀及操纵气缸等要求过滤精度≤50~75μm,操纵气马达等有相对运动的情况取过滤精度≤25μm,气控硬配滑阀、射流元件、精密检测的气控回路要求过滤精度≤10μm。
气动系统的设计计算
浏览字体设置:
+
10pt
放入我的网络收藏夹
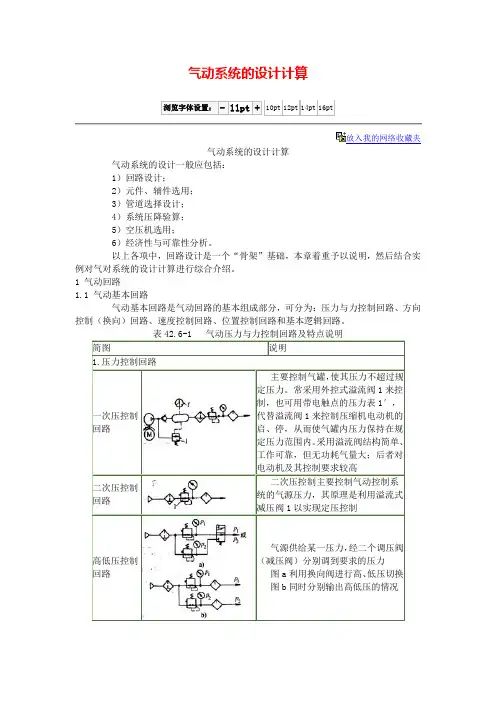
气动系统的设计计算
气动系统的设计一般应包括: 1)回路设计;
2)元件、辅件选用; 3)管道选择设计; 4)系统压降验算; 5)空压机选用;
6)经济性与可靠性分析。
以上各项中,回路设计是一个“骨架”基础,本章着重予以说明,然后结合实例对气对系统的设计计算进行综合介绍。
1 气动回路
1.1 气动基本回路
气动基本回路是气动回路的基本组成部分,可分为:压力与力控制回路、方向控制(换向)回路、速度控制回路、位置控制回路和基本逻辑回路。
1.1.2换向回路(见表4
2.6-2)
表42.6-2 气动换向回路及特点说明
1.1.3速度控制回路(见表4
2.6-3)
位置停止)
表42.6-4 气动位置控制回路及特点说明
1.1.5 基本逻辑回路(见表4
2.6-5)
实际应用中经常遇到的典型回路简称常用回路。
1.2.1 安全保护回路(见表42.6-6)
1.2.2往复动作回路(见表42.6-7、8)
表42.6-6 气动安全保护回路及特点说明
1.2.3程序动作控制回路
程序动作控制回路(表42.6-8)在实际中应用广、类型多。
下面仅举一个双缸程序动作(A1-B1-B0-A0)为例(表42.6-8)说明。
而不同执行缸以及各种不同程序动作的回路,将在本章第2节中介绍其基本设计方法。
1.2.4同步动作控制回路(见表42.6-9)
表42.6-9 气动同步动作控制回路及特点说明。
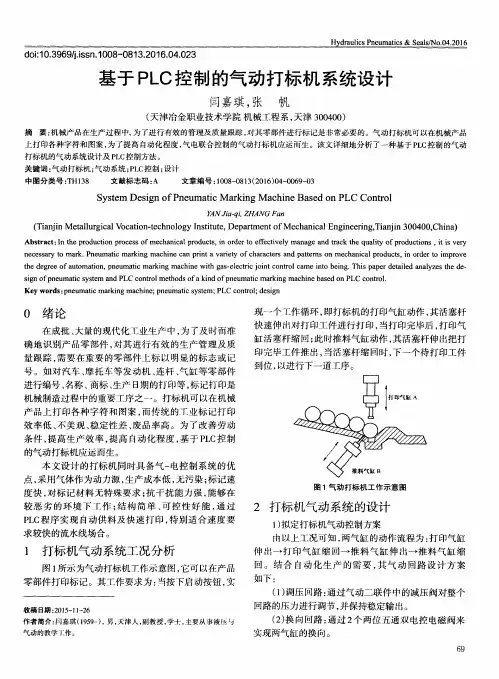
基于PLC的气动机械手控制系统设计一、本文概述随着工业自动化技术的飞速发展,气动机械手作为实现生产自动化、提高生产效率的重要工具,在各个领域得到了广泛应用。
基于可编程逻辑控制器(PLC)的气动机械手控制系统,以其稳定可靠、易于编程和维护的特性,成为当前研究的热点之一。
本文旨在探讨基于PLC 的气动机械手控制系统的设计方法,包括系统构成、硬件选择、软件编程以及调试与优化等方面,以期为我国工业自动化领域的发展提供参考和借鉴。
本文将简要介绍气动机械手及其控制系统的基本原理和特点,为后续的设计工作奠定理论基础。
将详细阐述PLC在气动机械手控制系统中的应用优势,包括其可靠性、灵活性以及扩展性等方面的优势。
在此基础上,本文将深入探讨基于PLC的气动机械手控制系统的设计方法,包括系统架构的设计、硬件设备的选择、软件编程的实现以及系统调试与优化等方面。
本文将总结基于PLC的气动机械手控制系统的设计要点和注意事项,为相关工程实践提供指导和借鉴。
通过本文的研究,旨在为我国工业自动化领域的发展提供新的思路和方法,推动气动机械手控制系统的技术进步和应用推广。
也期望本文的研究成果能对相关领域的学者和工程师产生一定的启示和借鉴作用,共同推动工业自动化技术的发展和创新。
二、气动机械手控制系统概述气动机械手控制系统是以可编程逻辑控制器(PLC)为核心,结合气动执行元件、传感器以及相应的控制逻辑,实现对机械手的精确控制。
该系统结合了气动技术的快速响应和PLC的灵活编程特性,使得机械手的动作更加准确、迅速且易于调整。
PLC控制器:作为整个控制系统的核心,PLC负责接收和处理来自传感器的信号,根据预设的程序逻辑,控制气动执行元件的动作。
PLC 具有高度的可靠性和稳定性,能够适应各种复杂的工作环境。
气动执行元件:包括气缸、气阀和气压调节器等。
气缸是实现机械手抓取、移动等动作的主要执行机构;气阀用于控制气缸的运动方向和速度;气压调节器则用于调节气缸的工作压力,以保证机械手的稳定性和精确性。

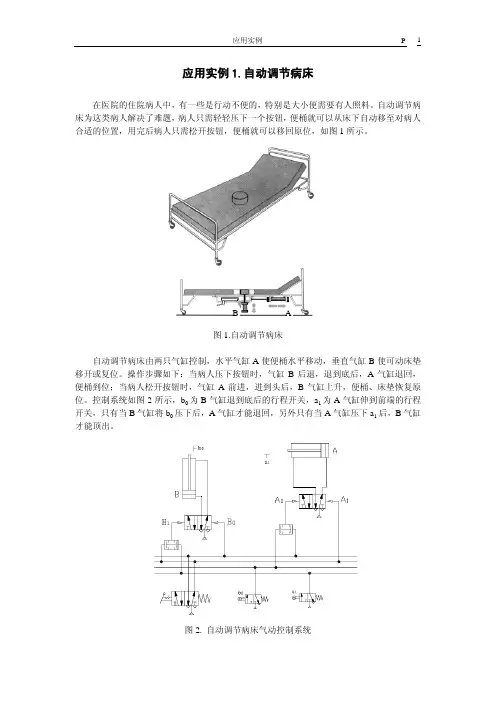
应用实例1.自动调节病床在医院的住院病人中,有一些是行动不便的,特别是大小便需要有人照料。
自动调节病床为这类病人解决了难题,病人只需轻轻压下一个按钮,便桶就可以从床下自动移至对病人合适的位置,用完后病人只需松开按钮,便桶就可以移回原位,如图1所示。
图1.自动调节病床自动调节病床由两只气缸控制,水平气缸A 使便桶水平移动,垂直气缸B 使可动床垫移开或复位。
操作步骤如下:当病人压下按钮时,气缸B 后退,退到底后,A 气缸退回,便桶到位;当病人松开按钮时,气缸A 前进,进到头后,B 气缸上升,便桶、床垫恢复原位。
控制系统如图2所示,b 0为B 气缸退到底后的行程开关,a 1为A 气缸伸到前端的行程开关,只有当B 气缸将b 0压下后,A 气缸才能退回,另外只有当A 气缸压下a 1后,B 气缸才能顶出。
图2. 自动调节病床气动控制系统AB应用实例2.软床垫耐久性试验机试验对象为软床垫,试验要求两个一定形状和质量的模块,从规定的高度以一定频率交替加载,以模拟日常使用条件,检验软床垫对长期重复性载荷的承载能力,试验机如图3所示。
图3.软床垫耐久性试验机气缸A 、B 带动两个模块,上下交替加载,其顺序动作为:A1 T1 A0 T2 B1 T1 B0 T2, 每次动作间隔需延时T1,自动循环加载,自动计加载次数,计数到达设定值后,自动停止,位置流程图如图4:图4. 软床垫耐久性试验机位置流程图采用步进模块对系统进行设计,如图5,计数信号为w1、w2,由两只延时阀实现动作间隔延时,启动时同时对步进模块总复位,计数器可进行预先置数,当达到设定值时发出停止信号。
a 1 a 0b 1 b 0A 1T 1A 0T 2B 1T 1AT 2图5. 软床垫耐久性试验机气动步进控制系统应用实例3.自动传输带通过棘轮机构使传输带间隔地传递工件,棘轮机构的运动由气缸进退实现,如图6所示,气动回路如图7所示,控制阀为2位5通双电控换向阀。
液压与气压传动课程设计--液压气动系统系统设计与分析宁波理工学院液压气动系统系统设计与分析姓名朱贤晖学号 3100612086专业班级机械电子工程102分院机电与能源工程学院完成日期 2013年12月19日目录1.设计任务书 (3)1.1课程设计题目 (3)1.2课程设计的目的和要求 (3)2.负载分析 (3)3.液压系统设计方案 (5)3.1确定液压泵类型 (5)3.2选用执行元件 (5)3.3快速运动回路和速度换接回路 (5)3.4换向回路的选择 (5)3.5组成液压系统绘原理图 (5)4.液压系统的参数计算 (7)4.1液压缸参数计算 (7)4.1.1初选液压缸的工作压力 (7)4.1.2确定液压缸的主要结构尺寸 (7)4.1.3计算液压缸各工作阶段的工作压力、流量和功率 (8)4.2液压泵的参数计算 (9)4.3电动机的选择 (9)5.液压元件的选择 (10)5.1液压阀及过滤器的选择 (10)5.2油管的选择 (11)5.3油箱容积的确定 (11)6.验算液压系统性能 (12)6.1压力损失的验算及泵压力的调整 (12)6.1.1工进时的压力损失验算和小流量泵压力的调整 (12)6.1.2快退时的压力损失验算及大流量泵卸载压力的调整 (12)6.2液压系统的发热和温升验算 (14)7.阀块的3D结构 (15)8.总结及感谢 (19)8.1设计小结 (19)8.2设计所得及感谢 (19)9.参考文献 (20)1.设计任务书1.1课程设计题目设计一台上料机的液压传动系统。
1)工作台的工作循环过程:“快速上升-慢速上升-停留-快速下降”。
2)工作参数:工件的重量为500Kg ,滑台的重量为100Kg ,快速上升要求>=45mm/s,慢速上升要求>=8mm/s ,快速下降要求>=55mm/s,滑台采用V 型导轨,导轨面夹角为90°,滑台与导轨的最大间隙为2mm ,气动加速与减速时间均为0.5s ,液压缸的机械效率为0.91(考虑密封阻力)。
河南工业大学机械工程实验教学中心典型案例视频简介 目 录 1.气动回路设计及搭接实验…………………………………………………………1 2.带传动的滑差率与效率测定实验………………………………………………13 3.在大型工具显微镜上测量螺纹量规……………………………………………14 气动回路设计及搭接实验——模拟加热炉炉门的行程控制一、实验特色 本实验为设计性实验。
通过学生对系统功能的理解,结合课堂上所学的理论知识,根据现有的实验设备及元器件,自行设计出完成规定功能的气动系统回路,同时设计PLC控制程序,并在实验室进行回路的组装搭接及调试,最终达到实验目的。
该实验具有以下一些特色: 1.摆脱了过去实验单一、死板的模式,使实验更具有新意和活力。
2.采用先进的模块化实验教学系统,系统组合更加灵活方便。
3.设计、组装、调试三位一体,既培养了学生的创新意识,也使学生应用知识的能力、设计能力、动手能力、分析问题和解决问题的能力得到了充分的锻炼。
二、实验目的 1.了解和掌握基本气动控制系统的构成及各组成部分的原理。
2.了解常用气动控制元件的结构及性能,掌握单向节流阀的结构及工作原理,掌握气源装置及气动三联件的工作原理和主要作用。
3.学习和掌握气动回路的设计和搭接方法,学习和掌握电控阀及气控阀的原理及PLC控制在系统中的应用方法。
4.培养设计、安装、联接和调试气动回路的实践能力。
三、实验内容及要求 采用PLC进行气动回路的控制,模拟加热炉门的开闭动作。
其示意图如下: 实验内容及要求如下: 1.掌握气动控制回路的设计、组装、调试的基本原理及方法。
2.设计气动回路,选择气动元件并进性回路的搭建、调试,模拟改变限位开关的位置以控制加热炉门的上升或下降,以达到模拟加热炉门的开闭动作。
3.气缸是在高温下工作的,所以密封件要选耐热性好的材料。
如在粉尘多的地力使用还考虑在气缸外部加上保护罩。
4.为了使加热炉内的温度不发生较大的变化,根据被加热物体尺寸的大小,应使炉门可以停止在任意的开度上。