气动行程程序控制系统图
- 格式:ppt
- 大小:989.50 KB
- 文档页数:36
行程阀控制气缸连续往返气控回路实验
一、实验目的
认识气缸、气动阀,气泵及三大件实物和职能符号,了解其工作原理及各元件在系统中所起的作用。
二、实验装置
1.THPQD-1型气动与PLC实验设备
2.气动元件见下表:手旋阀1个、杠杆式机械阀2个、气控二位五通阀1个、双作用气缸1个。
三、实验气动回路图
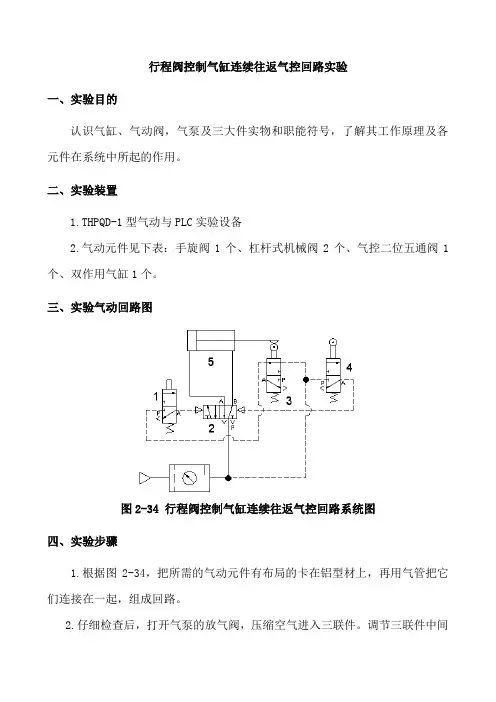
图2-34 行程阀控制气缸连续往返气控回路系统图
四、实验步骤
1.根据图2-34,把所需的气动元件有布局的卡在铝型材上,再用气管把它们连接在一起,组成回路。
2.仔细检查后,打开气泵的放气阀,压缩空气进入三联件。
调节三联件中间
的减压阀,使压力为0.4MPa,由原理图可知,气缸首先应退回气缸最底部,调整机械阀3,使阀3处在动作状态位,此后手旋手动阀1,使之换位,气缸前进,到头后,调整机械阀4,使阀4也工作在动作状态位,这样气缸便可周而复始的动作
3.使手动阀1复位,气缸退回到最底部后,便停止工作。
手动阀1手旋1次,气缸便往返一次。
五、思考题
1.为什么气缸能点动及连续运动?
2.分析系统的工作原理。
课题六气动程序控制回路设计方法一、概述生产实践中,各种自动生产线,大多是按程序工作的。
所谓程序控制,就是根据生产过程中的位移、压力、时间、温度、液位等物理量的变化,使被控制的执行元件,按预先规定的顺序协调动作的一种自动控制方式。
这种控制方式,能在一定范围内满足各种不同程序的需要,实现一机多用。
根据控制方式的不同,程序控制可分为时间程序控制、行程程序控制和混合程序控制三种。
各执行元件的动作顺序按时间顺序进行的控制方式称为时间程序控制。
时间程序控制系统中,各时间信号通过控制线路,按一定的时间间隔分配给相应的执行元件,令其产生有序的动作。
显然,这是一种开环控制系统。
执行元件完成某一动作后,由行程发信器发出相应信号,此信号输入逻辑控制回路中,经放大、转换回路处理后成为主控阀可以接受的信号,控制主控阀换向,再驱动执行元件,实现对被控对象的控制。
执行元件的运动状态经行程发信器检测后,再发出开始下一个动作的控制信号。
如此循环往复,直至完成全部预定动作为止。
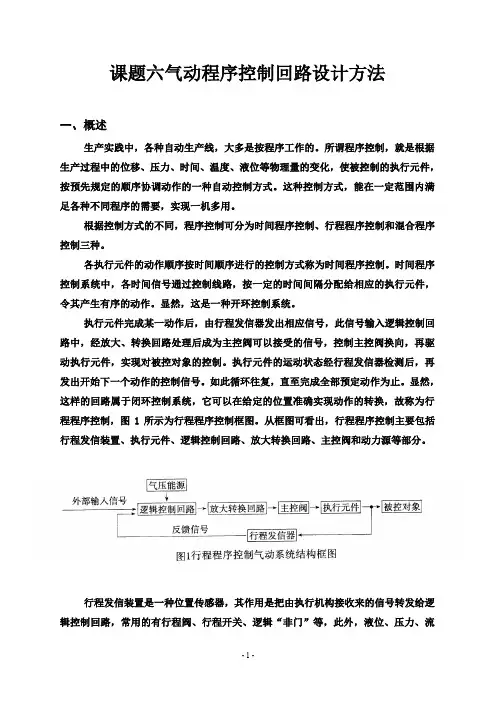
显然,这样的回路属于闭环控制系统,它可以在给定的位置准确实现动作的转换,故称为行程程序控制,图1所示为行程程序控制框图。
从框图可看出,行程程序控制主要包括行程发信装置、执行元件、逻辑控制回路、放大转换回路、主控阀和动力源等部分。
行程发信装置是一种位置传感器,其作用是把由执行机构接收来的信号转发给逻辑控制回路,常用的有行程阀、行程开关、逻辑“非门”等,此外,液位、压力、流量、温度等传感器也可看作行程发信装置;常用的执行元件有气缸、气液缸、气动马达等;主控阀为气动换向阀;逻辑控制回路、放大转换回路一般由各种气动控制元件组成,也可以由各种气动逻辑元件等组成;动力源主要包括气压发生装置和气源处理设备两部分。
行程程序控制的优点是结构简单、维修方便、动作稳定,特别是当程序中某节拍出现故障时,通过运行停止程序可以实现自动保护。
为此,行程程序控制方式在气压传动系统中得到广泛应用。

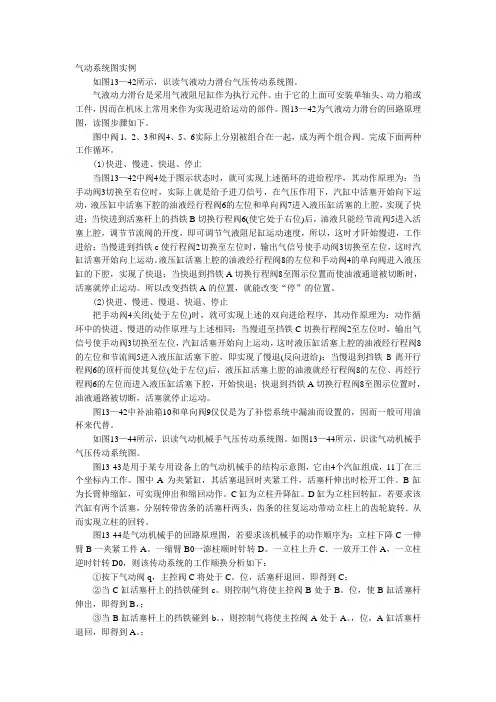
气动系统图实例如图13—42所示,识读气液动力滑台气压传动系统图。
气液动力滑台是采用气液阻尼缸作为执行元件。
由于它的上面可安装单轴头、动力箱或工件,因而在机床上常用来作为实现进给运动的部件。
图13—42为气液动力滑台的回路原理图,读图步骤如下。
图中阀l、2、3和阀4、5、6实际上分别被组合在一起,成为两个组合阀。
完成下面两种工作循环。
(1)快进、慢进、快退、停止当图13—42中阀4处于图示状态时,就可实现上述循环的进给程序,其动作原理为:当手动阀3切换至右位时,实际上就是给予进刀信号,在气压作用下,汽缸中活塞开始向下运动,液压缸中活塞下腔的油液经行程阀6的左位和单向阀7进入液压缸活塞的上腔,实现了快进;当快进到活塞杆上的挡铁B切换行程阀6(使它处于右位)后,油液只能经节流阀5进入活塞上腔,调节节流阀的开度,即可调节气液阻尼缸运动速度,所以,这时才阡始慢进,工作进给;当慢进到挡铁c使行程阀2切换至左位时,输出气信号使手动阀3切换至左位,这时汽缸活塞开始向上运动。
液压缸活塞上腔的油液经行程阀8的左位和手动阀4的单向阀进入液压缸的下腔,实现了快退;当快退到挡铁A切换行程阀8至图示位置而使油液通道被切断时,活塞就停止运动。
所以改变挡铁A的位置,就能改变“停”的位置。
(2)快进、慢进、慢退、快退、停止把手动阀4关闭(处于左位)时,就可实现上述的双向进给程序,其动作原理为:动作循环中的快进、慢进的动作原理与上述相同;当慢进至挡铁C切换行程阀2至左位时,输出气信号使手动阀3切换至左位,汽缸活塞开始向上运动,这时液压缸活塞上腔的油液经行程阀8的左位和节流阀5进入液压缸活塞下腔,即实现了慢退(反向进给);当慢退到挡铁B离开行程阀6的顶杆而使其复位(处于左位)后,液压缸活塞上腔的油液就经行程阀8的左位、再经行程阀6的左位而进入液压缸活塞下腔,开始快退;快退到挡铁A切换行程阀8至图示位置时,油液通路被切断,活塞就停止运动。
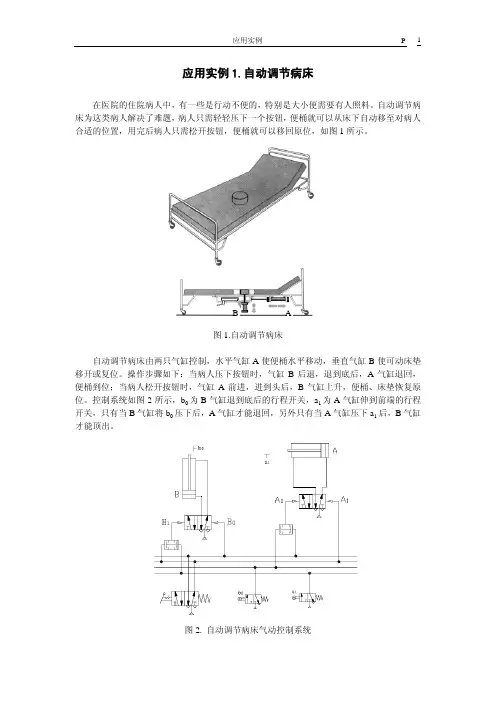
应用实例1.自动调节病床在医院的住院病人中,有一些是行动不便的,特别是大小便需要有人照料。
自动调节病床为这类病人解决了难题,病人只需轻轻压下一个按钮,便桶就可以从床下自动移至对病人合适的位置,用完后病人只需松开按钮,便桶就可以移回原位,如图1所示。
图1.自动调节病床自动调节病床由两只气缸控制,水平气缸A 使便桶水平移动,垂直气缸B 使可动床垫移开或复位。
操作步骤如下:当病人压下按钮时,气缸B 后退,退到底后,A 气缸退回,便桶到位;当病人松开按钮时,气缸A 前进,进到头后,B 气缸上升,便桶、床垫恢复原位。
控制系统如图2所示,b 0为B 气缸退到底后的行程开关,a 1为A 气缸伸到前端的行程开关,只有当B 气缸将b 0压下后,A 气缸才能退回,另外只有当A 气缸压下a 1后,B 气缸才能顶出。
图2. 自动调节病床气动控制系统AB应用实例2.软床垫耐久性试验机试验对象为软床垫,试验要求两个一定形状和质量的模块,从规定的高度以一定频率交替加载,以模拟日常使用条件,检验软床垫对长期重复性载荷的承载能力,试验机如图3所示。
图3.软床垫耐久性试验机气缸A 、B 带动两个模块,上下交替加载,其顺序动作为:A1 T1 A0 T2 B1 T1 B0 T2, 每次动作间隔需延时T1,自动循环加载,自动计加载次数,计数到达设定值后,自动停止,位置流程图如图4:图4. 软床垫耐久性试验机位置流程图采用步进模块对系统进行设计,如图5,计数信号为w1、w2,由两只延时阀实现动作间隔延时,启动时同时对步进模块总复位,计数器可进行预先置数,当达到设定值时发出停止信号。
a 1 a 0b 1 b 0A 1T 1A 0T 2B 1T 1AT 2图5. 软床垫耐久性试验机气动步进控制系统应用实例3.自动传输带通过棘轮机构使传输带间隔地传递工件,棘轮机构的运动由气缸进退实现,如图6所示,气动回路如图7所示,控制阀为2位5通双电控换向阀。
气动程序控制系统知识点:1、气动程序控制系统(行程程序控制、时间程序控制、混合程序控制)2、单往复程序回路的设计3、多往复程序回路的设计工业案例:圆管焊接机设计与搭建气动程序控制系统常用的气动控制方式:程序控制和伺服控制1、所谓程序控制是指控制对象的各个执行元件动作是根据生产过程中的位移、时间、压力、温度和液位等物理量变化,按照预先规定的顺序 动作的一种控制方式。
程序控制是经常采用的一种过程控制。
这种程 序控制系统要求按照预先给定的程序进行工作,其输出不能随负载干 扰及环境的变化而做出快速的响应,通常工作在低频范围内。
程序控制分为行程程序控制、时间程序控制和混合程序控制三种。
2、伺服控制是一种反馈控制。
伺服控制系统是靠偏差信号工作的,它要求系统的输出能跟踪随时间变化的控制输入。
它适合应用于要求快速 响应的场合。
行程程序控制1、行程程序控制是一种只有在前一个执行机构动作完成后才允许下一个程序动作进行的自动控制方式。
行程程序控制系统包括行程发信号、程序控制回路及 执行机构等部分。
形成发生器中用的最多的是行程阀。
此 外,各种气动位置传感器以及液位、温度、压力等传感器 也用作行程发信器。
程序控制回路可以用各种气动控制阀构成,也可用气 动逻辑元件构成。
常有的气动执行机构有气缸、气马达、 气液缸、气电转换器以及气动吸盘等。
2、行程程序控制的优点是结构简单、维护容易、动作稳定。
特别是当程序运行中出现故障时,整个程序动作就能停止 而实现自动保护。
行程程序控制方框图外部程序控制回路 执行元件 输入指令发信器行程程序控制是一个闭环控制系统时间程序控制• 时间程序控制是一种执行机构的动作顺序按时间顺序进行的自动控 制方式。
时间发信装置发出的时间信号,通过控制回路按一定的时间 间隔给相应的执行机构产生顺序动作。
• 时间发信装置有机械式(凸轮式、码盘式)、气动式(如环形分配 器)以及电子元件、电气元件组成的电气式三种。
一种用于判别气动行程程序障碍信号的方法在气压传动中,设计行程程序控制系统的一般过程是根据气缸的执行动作顺序,画出信号-动作状态图(即X-D图),找出障碍并消除障碍信号,进而画出逻辑原理图和气动回路图。
但是绘制信号-动作状态图是件较为复杂且容易出错的事情,本文利用程序信号相位状态表可以快速判断障碍信号并消除障碍信号,大大提高气动系统设计效率。
1 气动回路程序信号相位状态表简介气动程序,即各个气缸的动作顺序,气缸用大写字母A,B,C,D表示,下标1或0表示气缸的伸出或缩回两种运动状态,如A1表示气缸A 伸出,程序式中的每个动作称为一个相位或一段;信号,即与气缸动作触发的相应行程阀输出信号,用带下标的小写字母a1、a0、b1、b0表示;状态是指行程程序在气缸不同动作时行程阀输出信号的组合。
把以上的气动程序相位、信号、状态及其之间的关系按一定的格式和要求绘制在一张表格上,就是气动回路程序信号相位状态表。
2 程序信号相位状态表绘制和分析该表格的第一行为相位序号,用数值1、2、3、4表示。
第二行为相位序号对应的程序名称,即各个气缸的动作顺序。
第三行为终端信号,即气缸的活塞伸出或退回触动行程阀而发出的信号,用a1、a0、b1、b0表示,q代表启动阀发出的信号,一般用手动2位3通换向阀来实现气动系统的接通启动。
第四行为第三行单个各个信号的组合,其所遵循的原则是组合信号的改变直至程序动作发生改变,否则,一直延续先前的信号,比如,气缸A伸出后,会产生信号为a1,在B气缸伸出之前,必然是处于B0退回状态,这会导致b0信号产生。
所以在A1和B1动作之间,信号的组合为a1b0。
类似可以分析,在B1和B0动作之间,信号组合为a1b1,A和B气缸要维持先前的动作信号状态直至下次改变,在B0和A0之间,信号组合为a1b0,在A0和A1之间,信号组合为a0b0。
第五行为二进制表示的信号组合,即各个组合信号的下标排列,从图表中可以发现有两处10组合,这说明2相位的B1动作和4相位的A0动作是由同一个信号组合a1b0控制的,信号出现重复,即存在着障碍信号,动作状态发生了变化,而其控制信号没有改变,a1和b0就是障碍信号。