DSP_步进电机1
- 格式:doc
- 大小:285.93 KB
- 文档页数:22
步进电机控制方案 DSP简介步进电机是一种常用的电动机类型,适用于需要精确定位和高扭矩输出的应用场景。
与其他电机类型相比,步进电机具有较高的位置控制精度和较低的成本。
本文旨在介绍一种基于DSP(Digital Signal Processor,数字信号处理器)的步进电机控制方案,以实现精确的步进电机控制。
DSP介绍DSP是一种专门用于数字信号处理的芯片或系统。
其优势在于能够高效地进行信号处理、算法运算和数据处理。
DSP芯片通常带有多个高性能的计算核心和丰富的外设接口,适用于各种实时应用。
在步进电机控制方案中,使用DSP作为控制器可以实现高精度的位置控制和快速响应。
步进电机控制原理步进电机是一种需要以离散的步进角度进行控制的电机。
其控制原理基于电机内部的定子和转子之间的磁场交互作用。
步进电机的转子通过电流驱动产生磁场,定子通过相序切换实现转子的转动。
控制步进电机的关键是准确控制相序的切换和电流的驱动。
基于DSP的步进电机控制方案可以通过以下步骤实现:1.位置规划:根据实际需求,确定步进电机需要旋转到的位置。
这可以通过输入命令、传感器反馈或计算算法等方式得到。
2.相序切换:根据位置规划,确定相序的切换顺序。
相序切换是通过控制电机驱动器中的逻辑电平来实现的。
DSP通过输出控制信号控制驱动器的相序切换,从而实现电机的转动。
3.电流驱动:根据步进电机的特性和要求,确定合适的电流驱动参数。
通过DSP输出的PWM(Pulse Width Modulation,脉宽调制)信号和驱动电路,实现对电机相线施加准确的电流驱动。
4.反馈控制:根据应用需求,添加合适的反馈控制机制来实现闭环控制。
常见的反馈控制方式包括位置反馈、速度反馈和力矩反馈等。
DSP步进电机控制方案的优势相比传统的微控制器或PLC(Programmable Logic Controller,可编程逻辑控制器)控制方案,基于DSP的步进电机控制方案具有以下优势:•高性能:DSP芯片具有强大的计算能力和实时性能,可以实现复杂的控制算法和快速响应。
dsp步进电机课程设计一、课程目标知识目标:1. 学生能理解步进电机的原理、结构及其在DSP系统中的应用。
2. 学生能掌握步进电机控制的基础知识,包括步进电机的驱动方式和控制算法。
3. 学生能了解步进电机速度、位置控制的基本原理,并掌握相关参数的计算。
技能目标:1. 学生能运用所学知识,设计简单的步进电机控制程序,实现对步进电机的启停、转向、速度和位置控制。
2. 学生能通过实验和调试,分析步进电机控制中的问题,并提出相应的解决方案。
情感态度价值观目标:1. 培养学生对步进电机及其控制技术的兴趣,激发学生探索未知、勇于创新的科学精神。
2. 培养学生的团队合作意识,让学生在合作中学会倾听、沟通和解决问题。
3. 培养学生严谨、务实的科学态度,注重实践操作,养成良好的实验习惯。
课程性质:本课程属于电子信息类学科,结合实际应用,强调理论与实践相结合。
学生特点:学生处于高年级阶段,已具备一定的电子技术和编程基础,具有较强的学习能力和动手能力。
教学要求:注重启发式教学,引导学生主动思考、探索和实践,提高学生的实际操作能力。
通过课程学习,使学生能够将所学知识应用于实际工程问题中,培养学生的工程素养。
二、教学内容1. 步进电机原理及其在DSP系统中的应用- 步进电机的结构和工作原理- 步进电机在DSP系统中的集成方式2. 步进电机驱动与控制技术- 步进电机的驱动方式- 控制算法:开环控制与闭环控制- 步进电机速度、位置控制原理及参数计算3. 步进电机控制程序设计- 编程语言选择:C语言或汇编语言- 控制程序框架构建- 步进电机启停、转向、速度和位置控制程序编写4. 实验与调试- 实验设备与工具准备- 实验步骤及注意事项- 故障分析与解决方案5. 课程实践与案例分析- 步进电机控制项目实践- 分析实际工程案例,提高学生解决实际问题的能力教学内容安排与进度:第一周:步进电机原理及其在DSP系统中的应用第二周:步进电机驱动与控制技术第三周:步进电机控制程序设计第四周:实验与调试第五周:课程实践与案例分析教学内容与教材关联性:本教学内容与教材中“步进电机控制”章节紧密相关,涵盖了步进电机的基本原理、控制技术、程序设计等方面,确保了教学内容的科学性和系统性。
基于DSP的步进电机控制一DSP简介DSP,即Digital Signal Processor数字信号处理器,它是以数字信号来处理大量信息的器件,强大数据处理能力和高运行速度。
其工作原理是接收模拟信号,转换为0或1的数字信号。
再对数字信号进行修改、删除、强化,并在其他系统芯片中把数字数据解译回模拟数据或实际环境格式。
它不仅具有可编程性,而且其实时运行速度可达每秒数以千万条复杂指令程序,远远超过通用微处理器,是数字化电子世界中日益重要的电脑芯片。
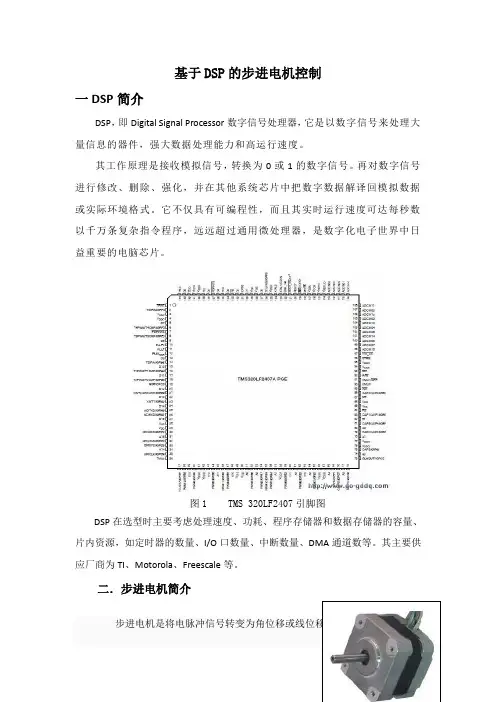
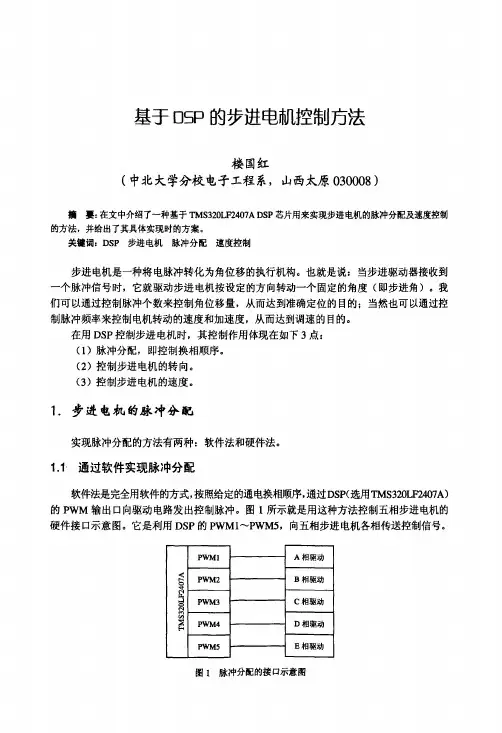
图1 TMS 320LF2407引脚图DSP在选型时主要考虑处理速度、功耗、程序存储器和数据存储器的容量、片内资源,如定时器的数量、I/O口数量、中断数量、DMA通道数等。
其主要供应厂商为TI、Motorola、Freescale等。
二.步进电机简介步进电机是将电脉冲信号转变为角位移或线位移进电机的转速或位置信号反馈给控制器DSP,从而实现转速或位置的闭环控制。
然后将转速或位置在液晶上显示,利用看门狗复位电路监控程序是否正常运行。
因为DSP本身使用工作电压和锁相环工作电压,故在系统使用外围电源电路提供5V电压时须转换成。
步进电机驱动电路由DSP产生的PWM信号不足以直接驱动电机运行,需要使用驱动电路,可使用集成芯片L298N,它是恒压恒流双H桥电机芯片,可同时控制两台直流电机,输出电流可达2A。
使用时应使用供电电压VS大于其逻辑电压VSS,否则将会出现电机失控的现象。
另外,为了保护电机,在驱动电路中需要加入两组续流二极管。
为了降低和减小驱动电路对控制系统的影响,可加入光耦器件。
DSP产生的PWM波经施密特反相器74HC14后加到TLP521-4光耦上进行光电隔离,再送给驱动芯片L298N.这样控制信号就变得稳定可靠了。
光电编码器的选择光电编码器的选择,可以选择增量式编码器或绝对值编码器,前者适用于速度检测,后者适用于位置检测。
编码器的A、B信号与正交解码脉冲单元QEP 相对应的引脚连接,可以检测出步进电机的速度(位置),并且能够判断出步进电机的旋转方向。
实验五步进电机控制实验一.实验目的1、认识步进电机的通电方式与步距角的关系及步进电机的通电顺序与转向的关系。
2、学习步进电机硬件环形分配器逻辑设计及实现方法。
3、学习使用PLC软硬件控制步进电机的单步、连续运动二.实验设备1、PLC实验主屏一套2、PLC编程上位机三.实验要求1、掌握4相步进电机在8拍模式下其驱动信号的逻辑表达式;2、学会使用逻辑表达式画出时序图和真值表的方法推导控制IO口的输出值表3、掌握基于PLC指令编程环境实现步进电机的单步、连续、正反转、以及开环伺服控制4、通过更改驱动脉冲的工作频率,认真观察并分析步进电机的最大工作频率、启动频率、失步等参数和特性四.实验内容及步骤实验内容:用PLC实现步进电机模拟控制实验步骤:1、把PLC自身的接线端子O/0、O/1、O/2、O/3、O/4分别与步进电机模拟控制实验上的N1、N2、N3、N4、N5接通,I/0、I/1、I/2、I/3与M1、M2、M3、M4接通。
2、把PLC主控制器旁24V的COM端接到此模拟实验的COM端上,旁边的+5V端接到此模拟实验的+5V端,PLC输出端所用到的COM口相互并联后再接到5V的GND端。
3、输入程序,检查无误后运行程序。
(程序见配套光盘步进文件)4、按下“开”按钮,再按“正转”按钮,电机开始正转。
“正转”和“反转”按钮切换步进电机的旋转方向。
五、例程 M3 M4 M2 M1 A3 A4 A2 A1 N3 N4 N2 N1COM+5VN5 L3 L4 L2L1 L5 开 关 正转 反转。
用DSP实现步进电机的步距角细分
齐晋;刘宇航;陈笑;郭秋芬
【期刊名称】《应用科技》
【年(卷),期】2004(031)009
【摘要】细分技术作为一种提高步进电机步距分辨率的手段已被大量采用,步进电机采用细分驱动能提高分辨率,减少力矩波动,解决步进电机的低频共振问题,如何使步进电机的微步距角更均匀,一直是细分技术所研究的主要问题.该方法对由DSP实现反应式步进电机细分驱动的电流波形作了分析,实现了对步进电机的步距角细分控制.
【总页数】3页(P10-12)
【作者】齐晋;刘宇航;陈笑;郭秋芬
【作者单位】哈尔滨工程大学,自动化学院,黑龙江,哈尔滨,150001;哈尔滨工程大学,自动化学院,黑龙江,哈尔滨,150001;哈尔滨工程大学,自动化学院,黑龙江,哈尔滨,150001;哈尔滨工程大学,自动化学院,黑龙江,哈尔滨,150001
【正文语种】中文
【中图分类】TM383
【相关文献】
1.步进电机步距角细分单片机控制系统设计与研究 [J], 薛龙;柳志成;杨震
2.步进电机步距角的软件细分法 [J], 智爱娟
3.专用芯片的步进电机步距角细分控制 [J], 王平;施文灶;黄晞;江华丽;何花
4.基于FPGA的步进电机步距角的细分设计 [J], 王剑;杨睿;陈家林
5.基于FPGA的步进电机步距角的细分设计 [J], 王剑;杨睿;陈家林
因版权原因,仅展示原文概要,查看原文内容请购买。
目录第1章设计内容及要求........................................ 错误!未定义书签。
设计内容................................................ 错误!未定义书签。
设计要求和主要任务...................................... 错误!未定义书签。
第2章总体设计方案.......................................... 错误!未定义书签。
系统总设计框图.......................................... 错误!未定义书签。
系统分析................................................ 错误!未定义书签。
系统设计................................................. 错误!未定义书签。
电源电路设计......................................... 错误!未定义书签。
驱动电路设计......................................... 错误!未定义书签。
稳压电路设计........................................ 错误!未定义书签。
时钟电路设计........................................ 错误!未定义书签。
比较电压电路设计.................................... 错误!未定义书签。
系统总电路图........................................ 错误!未定义书签。
第3章 DSP5509及程序设计.................................... 错误!未定义书签。
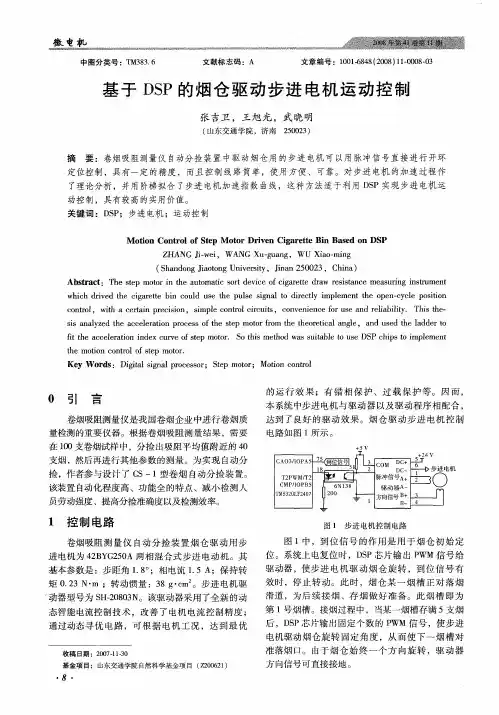
收稿日期:20000714 驱动控制 基于DSP 的步进电机控制系统设计李为民,邢晓正,胡红专,邓伟平(中国科学技术大学,合肥230027)Design of Control System of Stepper Motor B ased on DSPL I Wei -m i n ,X IN G Xiao -z heng ,HU Hong -z huan ,D EN G Wei -pi ng(University of Science and Technology of China ,Hefei 230027,China ) 摘 要:介绍了DSP 技术在步进电机控制系统中应用。
由DSP 微处理器构成步进电机的智能控制器,DSP 的数据端口构成步进电机的智能脉冲分配器,由定时器中断产生激励脉冲。
文章提出了基于单片ADSP -2181处理器的多目标步进电机脉冲扫描控制原理,每4个电机组成一个控制单元,控制单元分配一个地址序号,由DSP 处理器扫描其I/O 空间的控制单元驱动步进电机。
关键词:步进电机;控制系统;DSP 中图分类号:TM383 文献标识码:A 文章编号:1004-7018(2001)03-0027-02Abstract :This paper puts forward the application of DSP in the control system of stepper motor.Single DSP constitutes the intelligent controller of stepper motor.The data port of DSP forms the intelligent pulse distributor of stepper motor ,and the control system creates drive pulse of stepper motors by the timer of DSP.The paper also presents the control principle of pulse scanning method of multi -object stepper motors based on single ADSP -2181.Each control unit controls four stepper motors ,and has one I/O port address number of DSP.DSP drives stepper motors by scanning the I/O port address of each unit.K eyw ords :stepper motor ;control system ;DSP1引 言由于超大规模集成电路技术的迅速发展,DSP (Digital signal processor 数字信号处理器)的性能价格比得到很大提高,使得DSP 在电机控制领域的应用愈来愈广泛。
基于DSP步进电机的矢量控制摘要电机驱动的SMC3已经建立了一个采用ADSP - 2101数字信号处理器(DSP)的模拟设备。
SMC3的设计用于工作在拥有永磁电动机和许多极(通常是100)的两相一步电机。
固件在SMC3 DSP驱动步进电机相绕组采用磁场定向控制,而不是使用单一的步骤。
该方法得出了电机最大理论的有效性。
本论文介绍了磁场定向控制,以及如何SMC3硬件和固件实现它。
一、介绍电机步,是在工业应用中典型的驱动,也会表现出一些失控的行为,比如跳过步进共振等步骤。
然而,这是由于使用的驱动方法不对,而不是由于电机本身。
命名为“步进电机”表示电动机通常是如何推动的。
步电机成本低,因为他们的大量使用在工业,另一方面它们也能提供高转矩在给定的电机绕组电流(因为他们很多极)。
这是为了实现低速位置控制,并为减少力与速度之间转换的机械设备如齿轮。
采用磁场定向控制的SMC3(也称为矢量控制),得出了电机最大理论的有效性。
这种做法并不是普遍的,因为直到现在,电子元件约束之间的驱动还没能简化,如步进。
此外,直到1980年中期年代全部电气机械动力学理论,提出并建立了[Kr89]。
这对SMC3而言,不需要一个转速仪以为于速度来源于位置,位置是衍生自增量编码器或直接从电机的绕组电压。
本文的第二部分提供一些背景有关步进电机和矢量控制理论。
第三部分论述了SMC3硬件的设计,并且第四部分论述了固件的设计。
第五部分提出了一些实验结果,提出了第六部分作为结束语。
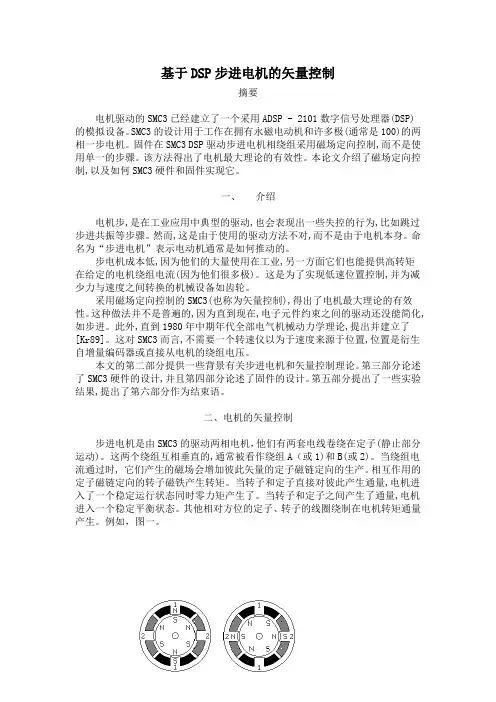
二、电机的矢量控制步进电机是由SMC3的驱动两相电机,他们有两套电线卷绕在定子(静止部分运动)。
这两个绕组互相垂直的,通常被看作绕组A(或1)和B(或2)。
当绕组电流通过时,它们产生的磁场会增加彼此矢量的定子磁链定向的生产。
相互作用的定子磁链定向的转子磁铁产生转矩。
当转子和定子直接对彼此产生通量,电机进入了一个稳定运行状态同时零力矩产生了。
当转子和定子之间产生了通量,电机进入一个稳定平衡状态。
DSP控制电机的原理及应用一、引言随着数字信号处理(Digital Signal Processing,DSP)技术的不断发展,其在电机控制领域的应用越来越广泛。
本文将介绍DSP控制电机的原理及其在工业生产和科学研究中的应用。
二、DSP控制电机的原理DSP控制电机的原理主要涉及以下几个方面:1. 数字信号处理技术DSP技术使用数字信号而不是模拟信号进行处理,通过将信号转换为数字形式,可以实现对信号进行更精确的处理和控制。
在电机控制中,DSP技术可以实现对电机速度、位置、力矩等参数的测量和控制。
2. 控制算法在DSP控制电机中,控制算法起着至关重要的作用。
常用的控制算法包括PID控制算法、模糊控制算法、神经网络控制算法等。
这些控制算法可以根据电机的特性和需求来选择和优化,以实现对电机的精确控制。
3. 实时性要求电机控制通常需要具备实时性能,即控制信号的响应时间要求较短。
DSP技术的高速运算和并行处理能力使得其具备较好的实时性能,可以满足电机控制的实时要求。
4. 接口设计DSP控制电机需要与电机驱动器进行接口设计,以实现对电机的控制信号传输。
接口设计需要考虑通信协议、数据格式、信号电平等因素,以确保控制信号的可靠传输和正确解析。
三、DSP控制电机的应用DSP控制电机在各个领域都有广泛的应用,包括但不限于以下几个方面:1. 工业生产在工业生产中,DSP控制电机可以应用于机器人、自动化生产线、数控机床等设备上。
通过精确控制电机的速度、位置和力矩等参数,可以提高生产效率和产品质量。
2. 交通运输在交通运输领域,DSP控制电机可以应用于电动汽车、电动自行车等交通工具上。
通过对电机的精确控制,可以提高能源利用效率和行驶稳定性,减少尾气排放和噪音污染。
3. 物流仓储在物流仓储领域,DSP控制电机可以应用于物流输送设备、堆垛机器人等设备上。
通过对电机的精确控制,可以实现自动化物流和仓储管理,提高物流效率和准确性。
基于DSP的步进电机控制系统软件设计【摘要】步进电动机是一种易于精确控制的电动机,控制方法多种多样,良好的性能使其受到广泛的应用。
本文根据步进电机原理及DSP控制方法,进行了步进电机控制系统的硬件和软件设计。
设计了使用以TMS320LF2407为主处理的DSP芯片作为控制核心,结合步进电机驱动器,具有位移控制和速度控制的步进电机控制系统。
【关键词】步进电机;DSP;控制系统0 概述在工业自动化领域中,电动机控制是特别重要的一部分,现代电动机控制技术变得特别重要的原因,也就是因为,电动机控制产品在工业控制领域需要的越来越大,而微处理器在电动机控制领域中用途也是越来越广泛。
然而,基于单片机的传统的控制策略不能满足需要的原因,也正是增加的处理数据量对实时性要求的提高。
随着数字信号处理器(DSP)的迅速发展及性价比的不断提高,数字信号处理器应用于电动机控制领域已经成为一种趋势。
本文阐述了一种以TMS320LF2407为主处理的DSP芯片作为控制核心的步进电机控制系统的设计。
1 系统的硬件组成系统使用DSP芯片,并使用软件程序驱动步进电机的这种步进电机控制系统,步进电机的转速、转动的角度以及转动的次数等可以在一定范围内自由设定,是通过软件编程的方法得以实现,方便灵活地控制步进电机的运行状态也可以使用这种方式,这样就可以满足不同用户的要求。
步进电机控制系统采用TMS320LF2407为硬件电路设计的核心,通过通信电路将接收到的数据来控制电机的运行。
硬件电路主要包括步进电机驱动器、键盘显示电路。
整个系统分为五个部分组成:TMS320LF2407 DSP中央控制器,反相器74LS06,光电隔离器4N25,驱动芯片ULN2003A和步进电动机,系统主要原理框图如图1所示:2 系统的软件设计与实现2.1 DSP集成软件开发环境CCS,(Code Composer Studio代码生成室)是TI公司DSP产品的软件开发工具的集成环境,这一开发工具软件将编辑、编译、链接和调试及图形、图像显示等多功能于一体。
基于DSP实现的步进电机控制器的设计引言DSP(Digital Signal Processor)是一种特别适合于进行数字信号处理运算的微处理器,其采用先进的软、硬件结构,其内部的程序空间和数据空间分开,可以同时访问指令和数据,并且具有事件模块管理功能及快速的中断处理功能,其以高性能及日趋低价位的特点,越来越广泛地应用于信息处理、控制系统中。
TMS320LF2407 芯片作为一款定点DSP 控制器尤为适合于控制系统,其所包含的事件管理模块,可以极为方便的实现电机数字化控制。
步进电机是数字控制系统的一种常见的执行元件,其接收数字控制信号(电脉冲信号),并转换成与之相对应的角位移或直线位移。
步进电机具有开环控制无累计误差的优点,控制系统结构简单,因而得到了广泛的应用。
本文所介绍的是一种基于TMS320LF2407 实现的步进电机控制系统的设计。
1 系统硬件构成整个系统分为五个部分组成:DSP 中央控制器TMS320LF2407,步进电机及驱动,光电编码器,键盘及液晶显示部分,以及整个系统的外围电源电路及看门狗复位电路组成,如本设计采用的是55BF03 型三相反应式步进电机,其接收数字控制信号(电脉冲信号),并转换成与之相对应的角位移或直线位移。
此设计是用中央控制器TMS320LF2407 产生的PWM 环形脉冲信号经过信号分配以及功率放大传送给步进电机实现对步进电机的角位置或直线位移控制,所以此步进电机的驱动结构设计由以下几部分组成,脉冲信号,信号分配,功率放大,步进电机及负载,如下光电编码器的选择,可以选择增量式编码器或绝对值编码器,前者适用于速度检测,后者适用于位置检测。
编码器的A、B信号与正交解码脉冲单元QEP 相对应的引脚连接,可以检测出步进电机的速度。
基于DSP的自诊断步进电机控制系统摘要:本文介绍了一种的新型的步进电机控制系统, 采用DSP 作为控制器, 构建步进电机的驱动系统, 并在此基础上实现细分角度和电流的实时运算。
利用其片内集成的事件管理模块通过软件实现脉宽调制。
提高了系统控制性能, 实现步进电机步距角的高精度、连续细分驱动。
同时通过振动信号的分析对电机轴承进行故障诊断。
综合利用了包络检波和对FFT 频谱分析法, 有效提高系统的实时性和测量精度, 并实现了步进电机在运行中瞬时故障的实时监测和报警。
1 引言步进电机是一种将电脉冲信号转换成角位移或直线位移的控制电机, 在数字控制系统中作为执行电动机, 由专门的、可以产生一定频率、功率和时序的电脉冲的驱动器驱动。
DSP(Digital Signal Processor) — TMS320LF2407 芯片作为一款定点DSP 控制器尤为适合于控制系统, 其所包含的事件管理模块,可较为容易的产生PWM脉冲信号, 采用其作为控制核心, 构建步进电机的驱动系统, 极为方便的实现电机数字化控制。
本文提出了一种基于TMS320LF2407 的步进电机控制系统, 它与传统的单片机控制相比, 能大大提高数据处理能力, 更能满足实时性和控制精度的要求, 并在此基础对步进电机进行故障诊断, 实现在步进电机在运行中瞬时故障的监控和报警。
2 系统总体设计本系统总体是由电机控制模块和自诊断模块两部分组成,整个电机控制区模块分为四个部分组成: DSP 中央控制器, 步进电机及驱动, 光电编码器, 键盘及液晶显示部分等组成。
在电机控制模块的设计中, 由键盘设定给定转速(位置), 通过中央控制器TMS320LF2407 来产生PWM脉冲信号来控制步进电机的转速(位置),可以采用光电编码器对步进电机的转速( 位置) 进行采样检测实现闭环控制, 也.可以采用开环控制无需转速( 位置) 信号, 以上过程中的多个变量、参数可以在液晶显示屏上得到直观地反映。
《DSP基础与应用系统设计课程设计》课程设计报告题目:基于DSP的步进电机控制模块设计姓名:吴清清院系:电力学院专业:电子科学与技术学号: 201312309指导教师:谭联完成时间: 2016 年 12 月 31 日摘要电动机控制是工业自动化进程中一个相当重要的组成部分,随着工业自动控制对电动机控制产品需求的不断增加,现代电动机控制技术也变得越来越重要,微处理器已经广泛用于电动机控制领域。
由于处理数据量的增加和对实时性的要求不断提高,传统的基于单片机的控制策略越来越不能满足需要,随着数字信号处理器(DSP)的迅速发展及性价比的不断提高,数字信号处理器应用于电动机控制领域已经成为一种趋势。
因此研究DSP在控制系统中的应用也有重要的意义。
关键词:电动机控制;步进电动机;数字信号处理器;控制系统目录摘要1 课程设计题目、内容与要求 (1)1.1 设计内容 (1)2.步进电机的介绍 (1)2.1步进电机的概念 (1)2.2步进电机的原理 (1)2.3步进电机的分类 (1)3 系统设计 (2)3.1 DSP芯片的选择 (2)3.2系统框图 (2)3.3 步进电机的DSP控制 (2)3.3.1 芯片在电机控制中的应用 (2)4.硬件电路设计 (3)4.1驱动电路 (4)4.2时钟电路 (4)4.3复位电路设计 (5)4.4外部存储器设计 (5)4.5JTAG 仿真接口 (6)5程序设计 (7)5.1流程图 (7)5.2程序 (8)6实验现象 (8)7.总结 (9)8.参考文献 (9)附录: (10)1 课程设计题目、内容与要求1.1 设计内容利用DSP设计一个步进电机控制模块。
掌握使用DSP的扩展I/O端口控制外围设备信息的方法。
掌握使用 DSP 通用计时器的控制原理及中断服务程序的编程方法。
了解步进电机的控制方法。
1.2 具体要求(1)完成硬件各部分的设计(2)软件部分的设计。
2.步进电机的介绍2.1步进电机的概念步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。
设计内容与设计要求一、设计内容:设计实现步进电机控制系统,主要技术要求:设计实现两相四拍式步进电机正反向交替转动360度,转速为10转/分,并设计实现二极管显示相序变动。
二、设计要求:1、给出硬件设计原理图;2、给出实现流程图及编写实现程序;3、完成系统的实验装置调试;4、写出设计报告;主要设计条件提供计算机和仿真器、DSP实验设备说明书格式1.课程设计报告书封面;2.任务书;3.说明书目录;4.设计总体思路及方案比较;5.硬件电路设计;6.实现流程图及编写实现程序;7.设计调试体会与总结;8.附录(总电路原理图);9.参考文献。
进度安排第一周:星期一:安排任务、讲课;星期二~星期五:查资料、设计;第二周:星期一~星期二:设计仿真与调试;星期三~星期四:写总结报告星期五:答辩。
参考文献目录前言 (1)第1章步进电机原理 (2)1.1 步进电机 (2)1.2 步进电机种类及区别 (2)1.3控制系统的硬件组成 (3)1.4 步进电机的工作原理 (3)1.4.1换相顺序 (3)1.4.2步进电机的速度 (3)1.4.3 步进电机的转向 (4)第2章步进电机的驱动和控制电路 (5)2.1 步进电机的功率驱动电路 (5)2.2 步进电机控制电路 (5)第3章步进电机的DSP控制方法 (6)第4章程序设计及其流程图 (7)第5章调试现象 (8)总结 (9)参考文献 (10)附件程序源代码 (11)1.主程序 main.c (11)2. 头文件 IO.h (14)3. 中断向量表文件vectors.asm (14)4. 命令文件 mycmd.cmd (15)前言步进电机作为一种电脉冲—角位移的转换元件,由于具有价格低廉、易于控制、无积累误差和计算机接口方便等优点,在机械、仪表、工业控制等领域中获得了广泛的应用。
通过DSP对步进电机的控制可以实现系统实时、精确、高效、安全的设计要求,从而实现了自动化生产过程。
作为重要部件的DSP是否实现控制要求是应用系统能否可靠工作的关键。
许多研究机构和电机生产厂家对于用单片机和用功率器件来设计步进电机驱动系统作了大量的研究,如把MCS-51系列的8031单片机、美国Microchip公司的PIC系列的PIC16C5X、各类PLC和VMOS管等功率器件作为控制系统都是比较成熟的。
这些方面的资料和经验对于将更高速的DSP器件用在驱动系统上都是很有帮助的。
现在流行的方法是将一系列外围设备如数模转换器(A/D)、脉宽调制发生器(PWM)和数字信号处理器(DSP)内核集成在一起,就获得一个强大又非常经济的电机控制专用的的DSP。
许多厂家开发出了电机专用的DSP器件和支持各种通用算法的模拟软件。
不仅芯片的运算速度越来越快,且软件中集成和固化在硬件中的算法模块越来越多,使得实现各种功能和进行电机性能研究变得现实和容易,能够实现更加理想的控制要求,随着对步进电机的研究更加深入与芯片价格的降低和功能的增加以及随着半导体工艺,尤其是高密度CMOS工艺的发展和进步,芯片的价格日益下降,而性能却不断提高,软件和开发工具越来越多,越来越好,应用范围日益广泛。
DSP作为一种高速处理器件在驱动系统中的应用也会更加广泛和普及,研究DSP在控制领域中的应用也有着重大现实意义。
第1章步进电机原理1.1 步进电机步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
可用来控制机器人手臂以及车轮等部件,工作可靠,控制容易。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达调速的目的。
因此在需要准确定位或调速控制时均可考虑使用步进电机。
电机铁芯扭槽叠扣冲压控制系统是为实现模具加工智能化控制要求,为企业设计的实用性产品,其要求是对高速冲床附加一智能模具控制器,该控制器在不影响冲床原有的运行及控制的基础上,采集相关的输入信号,并实现对所冲模具的有效控制。
本文设计的控制器要求扭槽模具每冲一片后移动一个步距到达另一个特定位置,再冲另一片,连续冲出的铁芯片,经叠压后,形成所要求的扭槽形状。
控制系统强调铁芯加工过程中的角度位移控制,希望具有足够高精度的步距角,并且运行稳定性好。
控制系统选用了两相混合型步进电机作为位置控制机构,通过DSP的控制,将输入的脉冲信号线性地转换为位移量,从而控制电机铁芯的扭槽。
传统步进电机控制电路的实现多用单片机或专用接口芯片,此类方法存在单片机易受电机干扰,专用接口芯片使用灵活性差等缺点。
本文提出的利用FPGA 实现步进电机控制的方案,具有修改方便、使用灵活、可靠性高、可移植性强等优点。
1.2 步进电机种类及区别步进电机分三种:永磁式(PM),反应式(VR)和混合式(HB)永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度或15度;反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。
在欧美等发达国家80年代已被淘汰。
混合式步进是指混合了永磁式和反应式的优点。
它又分为两相四相和五相:两相步进09.12.20一般为1.8度而五相步进角一般为0.72度。
这种步进电机的应用最为广泛。
1.3控制系统的硬件组成步进电机控制的最大特点是开环控制,不需要反馈信号。
因为步进电机的运动不产生旋转量的误差累积。
由DSP实现的步进电机控制系统结构如图1所示。
控制系统中的核心芯片是DSP,如虚线所示。
它由两大功能模块组成:a.速度控制模块,核心是锁相环PLL宏模块电路,它在不同速度控制信号作用下,可将经时钟分频器分频后的系统时钟改变为不同的PWM信号,将此信号作为速度控制模块的变频时钟,可达到改变步进电机速度的目的;b.方向控制模块,核心是脉冲分配电路,在每一个变频时钟周期内,脉冲分配器可在不同的方向控制信号下产生不同方向的步进时序脉冲,从而控制步进电机顺2步进电机及其驱动器的选用步进电机可以用数字信号直接控制,随着数字控制系统的发展,步进电机的应用也越来越广泛。
步进电机需配置一个专用的电源供电,电源的作用是让电动机的控制绕组按照特定的顺序通电,即受输入的电脉冲控制而动作,这个专用电源称为驱动电源(或驱动电路)。
步进电机及其驱动电源是一个互相联系的整体,步进电机的运行性能是由电动机和驱动电源两者配合所形成的综合效果。
1.4 步进电机的工作原理1.4.1 换相顺序步进电机的通电换相顺序是严格按照步进电机的工作方式进行的。
通常把通电换相这一过程称为“脉冲分配”。
例如,四相步进电机的单四拍工作方式,其各相通电的顺序为A-B-C-D,通电控制脉冲必须严格地按照这一顺序分别控制A、B、C、D相的通电和断电。
1.4.2步进电机的速度如果给步进电机发一个控制脉冲,它就转一个步距角,再发一个脉冲,它会再转一个步距角。
两个脉冲的间隔时间越短,步进电机就转得越快。
因此,脉冲的频率ƒ决定了步进电机的转速,在可控制的速度范围内,步进电机的转速和脉冲的频率成正比。
步进电机的每分转速可由下式计算:zNf n 60 其中f 是脉冲频率,z 是转子齿数,N 是拍数。
当步进电机的工作方式确定之后,调整脉冲的频率,就可以对步进电机进行调整。
2.4.3步进电机的转向根据步进电机的工作原理,如果按给定的工作方式正序通电换相,则步进电机正转;如果按方序通电换相,则步进电机反转。
例如四相步进电机工作在单四拍方式,通电换相的正序是A -B -C -D ,电机就正转;如果按反序A -D -C -B ,电机就反转。
如果四相步进电机工作在双四拍方式,通电换相的正序是AB -BC -CD -DA ,电机就正转;如果按反序DA -CD -BC -BA ,电机就反转。
第2章步进电机的驱动和控制电路2.1 步进电机的功率驱动电路步进电机是一种数字元件, 易于与数字电路接口, 但一般数字电路的信号能量远远不足以驱动步进电机。
因此, 必须有一个与之匹配的驱动电路来驱动步进电机。
CI-53002步进电机模块包含四相步进电机与功率驱动电路。
功率驱动电路(FT5754)内含四组达林顿晶体管当作电子开关,分别来控制步进电机四组线圈A、B、/A、/B的通电与否,这样就构成了步进电机的功率驱动电路。
2.2 步进电机控制电路实现步进电机通电换相控制也就是脉冲分配的方法有两种:软件法和硬件法,这里只介绍设计中采用的软件法。
软件法是完全用软件的方式,按照给定的通电换相顺序,通过DSP的PWM输出口向驱动电路发出控制脉冲。
实验电路图2所示就是用软件法控制四相步进电机的硬件接口图。
分别用DSP的PWM1~PWM4,向四相步进电机各相传送控制信号。
图3 步进电机的控制电路第3章步进电机的DSP控制方法TDS2407EA是一块以TMS320LF2407ADSP为核心的DSP评估板,通过扩展口的PWM波,可以很方便的对步进电机进行控制。
步进电机的驱动电路是根据控制信号工作的。
在步进电机的DSP控制中,控制信号是由DSP产生的。
以最简单的四相单四拍为例,四相单四拍工作方式通电换相的正序为A-B-C-D,共有4个通电状态。
利用TMS320LF2407A DSP的EV A事件管理器,设计定时器T1的周期值为步进脉冲的周期,即T1PR=1/ƒ。
当周期中断时,在中断处理子程序中,通过修改比较方式控制寄存器ACTRA中的相应位为“强制高”或“强制低”的方法,来控制某相通断电,实现换相。
修改ACTRA的具体方法是:“强制高”代表通电;“强制低”代表断电,则可用4个控制字来对应这4个通电状态。
这4个控制字见表1。
表1 四相四拍工作方式的控制字通电状态ACTRA寄存器的值(各位相)控制字7,6(D) 5,4(C) 3,2(B) 1,0(A)A 00 00 00 11 0003HB 00 00 11 00 000CHC 00 11 00 00 0030HD 11 00 00 00 00C0H在T1周期中断处理子程序中,通过查表的方法根据当前状态和转向查得控制字,将这个控制字送入比较方式控制寄存器,就可以实现换相。
每送一个控制字,就完成一“拍”,步进电机就转过一个步距角。
依次完成4次换相,步进电机就会正向转动一个齿距角。
如果按照控制字的反序查表,就会实现步进电机的反转。
第4章程序设计及其流程图第5章调试现象图6 运转模式功能仿真图7 正反转控制功能仿真总结经过两个星期的努力我的课程设计终于完成了,但是现在回想起来做课程设计的整个过程,颇有心得,其中有苦也有甜,艰辛同时又充满乐趣,不过乐趣尽在其中!此次的课程设计,我学到了很多知识。
首先很感谢这次辛勤辅导我们的刘老师,在2周的时间中对我们进行了具体而深刻的教育。