文献综述-步进电动机的微机控制
- 格式:doc
- 大小:49.50 KB
- 文档页数:7
步进电机控制方法步进电机是一种将电信号转换为精确的机械运动的特殊电机。
由于其高精度、可控性和稳定性,步进电机广泛应用于许多领域,如工业自动化、医疗仪器、机器人技术等。
本文将讨论步进电机的控制方法,在这些方法中,人们可以实现对步进电机的精确控制和位置控制。
首先,我们来介绍步进电机的基本工作原理。
步进电机的转子由永磁体或由电磁铁组成,通常与定子上的绕组相互作用。
当绕组依次激励时,电机的转子会按照一定的角度顺序旋转。
每次激励的脉冲将使转子转动一个固定的角度,称为步长。
因此,通过正确控制脉冲信号的频率和顺序,我们可以精确地控制步进电机的运动。
步进电机的控制方法主要分为开环控制和闭环控制。
开环控制是最简单的一种方法,通过给步进电机提供一系列的脉冲信号来控制其转动。
这些信号的频率和脉冲宽度决定了电机的转速和位置。
开环控制方法适用于需要较低精度和较简单控制的应用,例如简单的运动控制和位置复位。
闭环控制方法则更加复杂,但也更加精确。
闭环控制通过使用编码器或其他位置传感器来监测步进电机的实际位置,并将其与期望位置进行比较。
根据比较结果,控制系统将调整脉冲信号的频率和脉冲数量,以使电机达到期望的位置和运动状态。
闭环控制方法适用于需要高精度和复杂运动控制的应用,例如精密仪器和机器人。
除了开环控制和闭环控制之外,还有其他一些常用的步进电机控制方法。
例如,微步控制方法可以进一步提高步进电机的分辨率。
微步控制通过将每个步进脉冲细分为更小的微步脉冲,从而将电机的角度控制能力提高到更高的级别。
这种方法通常需要更先进的控制电路和算法。
此外,还有一些高级的控制方法,如矢量控制和感应控制等。
矢量控制方法通过同时控制步进电机的多个绕组来实现更复杂的运动模式,提高电机的性能和动态响应能力。
感应控制方法则利用感应原理,通过识别转子位置和磁场变化来控制电机运动。
这些高级控制方法在某些特定的应用领域中具有重要意义,但通常需要更复杂的控制算法和硬件实现。
开题报告-步进电动机的微机控制开题报告电气工程及自动化步进电动机的微机控制一、综述本课题国内外研究动态,说明选题的依据和意义1、步进电动机概要步进电动机属于DC驱动的同步电动机,它是纯粹的数字控制电动机。
它是将电脉冲激励信号转换成相应的角位移或线位移的离散值控制电动机,这种电动机每当输入一个电脉冲就动一步,所以又称脉冲电动机。
近30年来,数字技术、计算机技术和永磁材料的迅速发展推动了步进电动机的发展,为步进电动机的应用开辟了广阔的前景。
步进电动机主要用于数字控制系统中,精度高,运行可靠。
如采用位置检测和速度反馈,亦可实现闭环控制。
步进电动机已广泛地应用于数字控制系统中,如数模转换装置、数控机床、计算机外围设备、自动记录仪、钟表、和磁盘等等之中,另外在工业自动化生产线、印刷设备如打印机、绘图机等中亦有应用。
步进电动机有如下的特点:步进电动机的的角位移与输入脉冲数严格成正比,因此,当它转一转后,没有累计误差,具有良好的跟随性。
由步进电动机与驱动电路组成的开环数控系统,既非常简单、廉价,又非常可靠。
同时,它也可以与角度反馈环节组成高性能闭环数控系统。
步进电动机的动态响应很快,易于启停、正反转及变速。
速度可在相当宽的范围内平滑调节,低速下仍能保证获得大转矩,因此一般可以不用减速器而直接驱动负载。
步进电动机只能通过脉冲电源供电才能运行它不能直接使用交流电源和直流电源。
步进电动机存在震荡和失真现象,必须对控制系统和机械负载采取相应措施。
步进电动机自身噪声和振动较大,带惯性负载的能力较差。
2、步进电动机的发展过程步进电动机的机理是基于最基本的电磁铁作用、其原始模型起源于1830年至1860年间。
1870午前后开始以控制为目的的尝试、应用于氮弧灯的电极输送机构中。
这被认为是最初的步进电动机。
此后,在电话自动交换机中广泛使用了步进电动机。
不久又在缺乏交流电源的船舶和飞机等独立系统中广泛使用。
20世纪60年代后期,在步进电动机本体方面随着水磁材料的发展,各种实用性步进电动机应运而生,而半导体技术的发展则推进了步进电动机在众多领域的应用。
邯郸学院本科毕业论文(设计)题目基于单片机的步进电机控制系统设计学生xxx指导教师xxxx讲师年级2012级专业电气工程及其自动化二级学院xx学院邯郸学院机电学院2016年5月郑重声明本人的毕业论文(设计)是在指导教师刘伟亮的指导下独立撰写完成的。
如有剽窃、抄袭、造假等违反学术道德、学术规范和侵权的行为,本人愿意承担由此产生的各种后果,直至法律责任,并愿意通过网络接受公众的监督。
特此郑重声明。
毕业论文(设计)作者(签名):年月日基于单片机的步进电机控制系统设计摘要步进电动机由于用其组成的开环系统既简单、廉价,又非常可行,因此在打印机等办公自动化设备以及各种控制装置等众多领域有着极其广泛的应用.随着微电子和计算机技术的发展,步进电机的需求量与日俱增,它广泛用于打印机、电动玩具等消费类产品以及数控机床、工业机器人、医疗器械等机电产品中,其在各个国民经济领域都有应用。
研究步进电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。
步进电机是一种能将电脉冲信号转换成角位移或线位移的机电元件,步进电机控制系统主要由步进控制器,功率放大器及步进电机等组成。
采用单片机控制,用软件代替上述步进控制器,使得线路简单,成本低,可靠性大大增加。
软件编程可灵活产生不同类型步进电机励磁序列来控制各种步进电机的运行方式。
本设计是采用STC89C51单片机对步进电机的控制,通过I/O口输出的时序方波作为步进电机的控制信号,信号经过芯片ULN2003驱动步进电机。
根据不同的需要我们可以有十个不同档位速度的选择,并可以实现正反转。
为了更显人性化,我们加上了一个数码管显示,显示步进电机的运行状态。
关键词:步进电机,单片机,正反转控制,电机驱动Stepping motor control system design based on MCUGuo Chen Directed by LIU Wei LiangABSTRACTStepper motor due to the use of the composition of the open—loop system is simple, cheap, and very practical, so it is used widely in many fields of printer and other office automation equipment and various control device。
步进电动机的控制作者:金晓明杨中华来源:《中国新技术新产品》2014年第18期摘要:本文阐述了步进电动机的工作原理;步进电动机的控制方式:数字电路、单片机及PLC的控制。
关键词:步进电动机;控制;方法中图分类号:TM383 文献标识码:A步进电动机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在没有超载的情况下,脉冲信号的频率和脉冲数决定了步进电机的转速、停止的位置,而与负载变化的没有关系,即在给步进电动机加一个脉冲信号时,电机则转过一个步距角。
因此,步进电动机的控制是取决于脉冲信号的两个参数:频率和数量。
步进控制一般采用的是开环控制,由于没有实现转速或者位置的反馈,因此,控制过程结构简单、维护方便,因而应用领域非常广泛,如:机械、冶金、电力、纺织、电信、电子、仪表、化工、轻工、办公自动化设备、医疗、印刷以及航空航天、船舶、兵器、核工业等国防工业等领域。
真可谓步进控制已经渗透到现代各个领域。
步进电动机的控制的基本方法有以下三种:数字电路控制、单片机控制及PLC的控制。
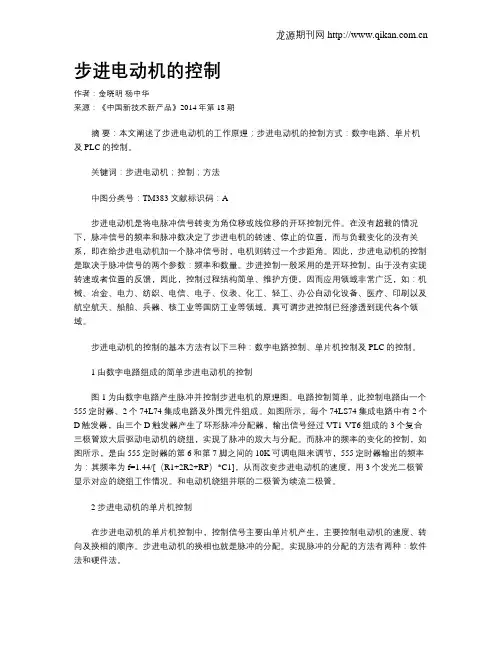
1 由数字电路组成的简单步进电动机的控制图1为由数字电路产生脉冲并控制步进电机的原理图。
电路控制简单,此控制电路由一个555定时器、2个74L74集成电路及外围元件组成。
如图所示,每个74LS74集成电路中有2个D触发器,由三个D触发器产生了环形脉冲分配器,输出信号经过VT1-VT6组成的3个复合三极管放大后驱动电动机的绕组,实现了脉冲的放大与分配。
而脉冲的频率的变化的控制,如图所示,是由555定时器的第6和第7脚之间的10K可调电阻来调节,555定时器输出的频率为:其频率为f=1.44/[(R1+2R2+RP)*C1],从而改变步进电动机的速度,用3个发光二极管显示对应的绕组工作情况。
和电动机绕组并联的二极管为续流二极管。
2 步进电动机的单片机控制在步进电动机的单片机控制中,控制信号主要由单片机产生,主要控制电动机的速度、转向及换相的顺序。
文献综述电气工程及自动化步进电机控制摘要:步进电机用于将电脉冲信号转换为角位移或线位移进行操作,已广泛应用于各个领域。
在简要介绍步进电机发展现状的基础上,详述步进电机的分类构造及其工作原理,进一步探讨采用单片机和可编程逻辑器件进行步进电机的控制。
关键词:分类;构造;发展;单片机;PLC1、步进电机的发展现状步进电机是国外发明的。
国外在大功率的工业设备驱动上,目前基本不使用大扭矩步进电动机,因为从驱动电路的成本,效率,噪音,加速度,绝对速度,系统惯量与最大扭矩比来比较,比较不划算,还是用直流电动机,加电动机编码器整体技术和经济指标高。
一些少数高级的应用,就用空心转杯电机,交流电机。
国外在小功率的场合,还使用步进电机,例如一些工业器材,工业生产装备,打印机,复印件,速印机,银行自动柜员机。
国外用许多现代的手段将步进电机排挤出驱动应用,除了前面提到的旋转编码器,打印机还使用光电编码带或感应编码带配合直流电动机,实现闭环直线位移控制[9]。
国内过去是用大力矩步进电动机实现机床数控,有实力的公司现在也采用交流电动机驱动数控机床,在驱动设备的主要差距,是国外对交流电动机的控制理论与工程分析和应用能力强,先进的控制理论作为软件,写在控制器内部。
总的来说,步进电机是一种简易的开环控制,对运用者的要求低,不适合在大功率的场合使用。
在卫星、雷达等应用场合,中国在文化大革命后期,就生产了力矩电机,就生产了环形力矩电机,在高品质的控制场合,有时还不能使用步进电机。
步进电机的细分控制,在改革开放初期,国内就已经基本掌握,这与交流电动机的矢量控制相比,难度要低得多。
2、步进电机的分类构造2.1 步进电机的分类目前,通常使用的步进电机主要包括永磁式步进电机(PM)、混合式步进电机(HB)、反应式步进电机(VR)和单相式步进电机。
永磁式步进电机,采用磁性转子铁芯,同时钉子产生脉冲电磁场,二者相互作用产生转动。
通常情况下为两相,体积比较小,转矩也比较小,步进角为7.5度或者15度。
![步进电机控制系统的设计[文献综述]](https://uimg.taocdn.com/e9a33cfd4b73f242326c5fb6.webp)
文献综述电子信息工程步进电机控制系统的设计摘要:步进电机是一种易于精确控制的执行元件,近几年来随着微电子技术的不断发展步进电机的控制方法也随之变得多种多样。
为了提高步进电机控制系统的动态性以及控制精度,本文献因此提出了一系列关于基于现场可编程门阵列(FPGA)和由数字信号处理器(DSP)构成的步进电机控制系统的设计方法。
关键字:现场可编程门阵列(FPGA);步进电机;数字信号处理器(DSP);引言20世纪后期随着晶体管的发明逐渐应用于步进电机上,使得对于数字化的控制变得更为容易。
如今的步进电机已广泛运用在高定位精度、高分解能、高响应性、信赖性等灵活控制性高的机械系统中[1]。
例如数控机床、计算机设备、自动记录仪等,另外在工业自动化生产线、印刷设备中均有应用。
随着步进电机的应用越来越广泛,步进电机在实时性和灵活性等性能上的要求也越来越高,虽然步进电机的发展迅速,但是在大功率步进电机驱动电源的设计和使用仍然存在问题,很大程度上地限制了大功率步进电机在数控机床、自动控制等技术方面的应用。
一、基本概况步进电机(Stepping Motor)是将电脉冲信号转化为角(线)位移的电元件,当步进驱动器接受脉冲信号后,就会驱动步进电机转动一个固定的角度,即步距角。
因此,通常以通过控制脉冲个数和控制脉冲频率来调节和控制角位移量及电机转动的速度和加速度,从而达到准确的定位和调速的目的。
在非超载的情况下,脉冲信号的频率和脉冲数来决定了电机的转速停止的位置,且不受负载变化的影响。
因此步进电机在速度、位置等控制领域的控制变的非常简单且容易操作。
最早步进电机的原理与今天的反应式步进电机的组成原理基本相同。
随着时代的发展,微型计算机具有多功能的特点,因而步进电动机的控制方式变得灵活和多样。
早期的步进电机的控制系统是分立元件来控制回路,它的缺点是调试安装复杂,要消耗大量元器件,而且定型之后,不容易改变其控制方案。
基于微型计算机的控制系统则是通过软件来控制步进电机,这样能够更好地发挥步进电机的潜力;因此,用微型计算机控制步进电机已经成为一种必然的趋势,并且也符合数字化的时代发展要求。
步进电机的精确控制方法研究摘要随着微电子和计算机技术的不断进步和高速的更新换代,作为机电一体化进程中制造出来的一种主要产品的步进电机的产量和数量也逐渐增多。
而且对于步进电机的应用也是是十分广泛的,比如很多的自动控制系统中大部分都会涉及到步进电机的使用。
众所周知,对于步进电机在应用方面的优势也是十分明显的,比如在对一些频带宽度较大的脉冲信号的控制,以此控制来实现对点击相关部件的速度调节上,实现速度控制以及相关部件的启动和停止,或者是控制相关部件的正向或者反向转动。
另外一个很大的优势就是步进电机可以实现整个构件开环系统不仅仅结构设计简便易行,而且造价低廉,工作性能相当稳定可靠。
当前对步进电机的研究焦点主要集中在对步进电机的驱动控制上,然而驱动控制也是步进电机的一个重要的关键技术。
步进电机的控制技术在很多的行业和领域里都有广泛的应用。
对于步进电机相关技术的研究国内很多的专家和学者都从不同角度不同侧面给出了详细的论断。
随着要求缩短步进电机的响应时间、提高运行速度等问题的提出,国内外的研究人员针对速度控制,提出了建立在线性速度模型和指数速度模型等数学模型上的控制方式,但都存在一定的问题;当解决要求步进电机有更小的步距角,更高的分辨率,或者为减小步进电机本身所固有的低频振动、噪声等问题时,出现了步进电机细分驱动技术,目前较为常见的有斩波恒流驱动、脉冲宽度调制驱动、电流矢量恒幅均匀旋转驱动等技术,这些驱动技术虽能满足特定场合的技术要求,但缺乏一定的灵活性。
本文的主要研究内容如下:对步进电机及其细分驱动系统进行了详细阐述,研究了步进电机的工作原理、运行性能,分析了步进电机细分驱动系统的作用和适用性,并对国内外步进电机细分驱动系统的研究作了简要介绍。
研究了步进电机在加减速控制过程中脉冲频率曲线的设计和他们的优缺点,并提出以步进电机控制系统模型和矩频特性为依据,推导出其加减速控制过程中的线性加正弦函数,在不发生失步和过冲的前提下,能够缩短步进电机的加减速时间,提高运行速度,充分发挥步进电机的工作性能。
步进电动机3000字论文篇一:步进电动机论文哈尔滨理工大学文献综述题目:步进电动机及其驱动器的工作原理简介学院:哈尔滨理工大学荣成学院专业:自动化学号:1030130221姓名:时延利指导教师:侯甲童完成日期: 2021年6月6日一:概述步进电动机是用脉冲信号进行控制,将点脉冲信号转换成相应的角位移和线位移的微电机,广泛地应用于打印机等办公知道设备以及各种控制设备。
步进电机和一般的电机不同,之接电源步进电机不能转动,而每加一个点脉冲转动却仅转动一定的角度,另外,改变脉冲的频率时,步进电机的速率也跟着改变。
步进电机按电磁转距产生机理的不同可以分为反应式步进电机,永磁式步进电机型式和混合式步进电机,而按绕组的相数又可以分为单相,两相,三相。
五相……… 二:步进电动机概念及其工作原理1、步进电动机的概念磁偶极矩步进电动机是一种将脉冲信号变换成相应的角位移(或线位移)的电磁装置,是一种下述的电动机。
一般电动机全都是连续转动的,而步进电动机则有定位和运转两种基本,当有脉冲输进肘步进电动机一步一步地转动,每给它一个脉冲信号,它就转过一定的角度。
步进电动机的角位移量和输进脉冲的个数严格成正比,在时间上与输进脉冲同步,因此只要控制输进脉冲的数目、频率及电动机变压器通电的相序,便可获得所需的转角、转速及转动方向。
在没有脉冲输进时,在绕组电源的激励下气隙能磁场使转子保持原有位置处于定位状态。
步进电动机按其输出转矩的大小来分,可以分为快速步进电动机和功率步进电动机电动机。
快速步进电动机连续工作频率高而输出转矩较小,一般在N·cm级,可以作为控制小型精密机床的工作台(例线切割机床)也可以和液压转矩放大器组成电液脉冲马达往驱动数控机床的工作台,而功率步进电动机的输出转矩就比较大是N·m级的,可以直接往驱动机床的移动终端部件。
步进电动机按其励磁相数,可以分为三相、四相、五相、六相甚至八相。
一般来说随着相数的增加,在相同频率的情况下,每相导通电流的时间增加,各相均匀电流会高些,从而并使电动机的转速—转矩特性会好些,步距角亦小。
本科生毕业设计(文献综述)题目:步进电机的设计与仿真姓名:学号:系别:电气工程专业:电气工程及其自动化年级:指导教师:步进电机控制器的设计与仿真——文献综述一选题的背景与意义步进电机作为一种将电脉冲信号转化为机械角位移或者线位移的机电元件,它能够在不涉及伺服系统复杂反馈环路的情况下实现良好的定位精度,并且具有性价比高、易于控制及无累计误差等优点,在民用、工用的经济型数控开环定位系统中获得了广泛的应用,且具有较高的实用价值。
步进电动机与一般电动机不同。
它的角位移量或者直线位移量正比于电脉冲数,而其线速度或者转速则正比于脉冲频率。
并且,在负载能力变化范围内,不会因电源电压、负载、环境条件的波动而变化[5]。
另外,步进电动机还可以在较宽的范围内,通过改变脉冲频率来调速;能够快速起动、制动和正反转;并且步进电动机还有一定的自锁功能。
由于步进电动机具有上述特点,因此由它和驱动控制器组成的开环数控系统,既具有较高的控制精度,良好的控制性能,又能稳定可靠的工作。
这些优点使得步进电动机在庞大的电机家族中占有不可替代的位置。
而混合式步进电动机的设计方法使得它就像是反应式和永磁式步进电动机的结合,可以像反应式一样的小步距,也具有永磁式控制功率小、绕组电感较小的特点。
目前广为使用的是两相混合式步进电动机,它的典型结构是定子8个极,转子齿数为50个,步距角为1.8度,它是上世纪60年代的美国专利,70年代初因应用于计算机外设,且专利保护的取消而迅速发展,但是它存在着两个明显的固有缺点,一个是步距角较大,使得低速转动时有较严重的振动和噪声,另一个是当频率突变过大时容易堵转、丢步或者过冲,这两个缺点对定位系统的精度会产生较大的影响。
步进电机作为一种机电一体化设备,电机本身固有的问题可通过驱动器或者控制器来弥补。
采用细分驱动技术可以大大减少低速转动时的振动和噪音,还可以起到减小步距角、提高分辨率、增大输出力矩的效果;采用升降频控制技术,则可以克服步进电机高速起停时存在的堵转、丢步或者过冲等问题,使步进电机转动得更加平稳、定位更加精确一个好的控制器可以使步进电动机控制更灵活,在很大程度上改善其运行性能。
基于单片机的步进电机控制系统的设计随着社会的发展、科技的进步以及人们生活水平的逐步提高,各种方便于生活的自动控制系统开始进入了人们的生活,以单片机为核心的自动控制系统就是其中之一。
同时也标志了自动控制领域成为了数字化时代的一员。
它实用性强,功能齐全,技术先进,使人们相信这是科技进步的成果。
它更让人类懂得,数字时代的发展将改变人类的生活,将加快科学技术的发展。
传统的步进电机控制方法是由触发器产生控制脉冲来进行控制的,当步进电机参数发生变化时,需要重新进行控制器的设计。
而且,传统的触发器构成的控制系统,控制电路复杂、控制精度低、生产成本高。
以微电子芯片为控制核心,以电力电子功率变换器为执行机构,在自动控制理论的指导下组成的控制系统,能通过控制电机转速或转矩进而控制生产机械或运动部件按照人们所希望的规律运动。
克服了传统控制器的缺点,满足工业生产新的控制要求,体现了更大的优越性,因此广泛应用于数字控制系统中。
如今各领域步进电机无处不在,高精度,实时监控的步进电机控制系统具有重要意义和实用价值。
单片机是单片微型计算机的简称,是微型计算机的一个重要分支。
单片机由单块集成电路芯片构成,内部含有计算机的基本功能部件:中央处理器CPU、存贮器和I/O接口电路等。
单片机只需要和适当的软件及外部设备相结合,便可成为一个单片机控制系统。
由于单片机的这种结构形式及它所采取的半导体工艺,使其具有很多显著的特点,因而在各个领域都得到了迅猛的发展。
单片机主要特点如下:(1)有优异的性能价格比。
(2)集成度高、体积小、有很高的可靠性。
(3)控制功能强。
(4)低功耗、低电压,便于生产便携式产品。
(5)单片机的系统扩展和系统配置较典型、规范,容易构成各种规模的应用系统。
由于单片机具有显著的优点,它已成为科技领域的有力工具,它的应用遍及各个领域,主要表现在以下几个方面:(1).单片机在智能仪表中的应用。
单片机广泛地用于各种仪器仪表,使仪器仪表智能化,并可以提高测量的自动化程度和精度,简化仪器仪表的硬件结构,提高其性能价格比。
步进电机技术文献步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。
每输入一个脉冲电机转轴步进一个步距角增量。
电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。
步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。
步进电机惯量低、定位精度高、无累积误差、控制简单等特点。
广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。
选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。
而在选用功率步进电机时,首先要计算机械系统的负载转矩,电机的矩频特性能满足机械负载并有一定的余量保证其运行可靠。
在实际工作过程中,各种频率下的负载力矩必须在矩频特性曲线的范围内。
一般地说最大静力矩Mjmax大的电机,负载力矩大。
选择步进电机时,应使步距角和机械系统匹配,这样可以得到机床所需的脉冲当量。
在机械传动过程中为了使得有更小的脉冲当量,一是可以改变丝杆的导程,二是可以通过步进电机的细分驱动来完成。
但细分只能改变其分辨率,不改变其精度。
精度是由电机的固有特性所决定。
选择功率步进电机时,应当估算机械负载的负载惯量和机床要求的启动频率,使之与步进电机的惯性频率特性相匹配还有一定的余量,使之最高速连续工作频率能满足机床快速移动的需要。
选择步进电机需要进行以下计算:(1)计算齿轮的减速比根据所要求脉冲当量,齿轮减速比i计算如下:i=(φ.S)/(360.Δ)(1-1)式中φ---步进电机的步距角(º/脉冲)S---丝杆螺距(mm)Δ---(mm/脉冲)(2)计算工作台,丝杆以及齿轮折算至电机轴上的惯量Jt。
Jt=J1+(1/i²)[(J2+Js)+W/g(S/2π)²](1-2)式中Jt---折算至电机轴上的惯量(Kg.cm.s²)J1、J2---齿轮惯量(Kg.cm.s²)Js----丝杆惯量(Kg.cm.s²)W---工作台重量(N)S---丝杆螺距(cm)中国论文下载中心步进电机小知识1.什么是步进电机?步进电机是一种将电脉冲转化为角位移的执行机构。
关于步进电机的控制摘要:为了简化步进电动机的控制,提高控制电路的适应性和可靠性,以步进电动机控制卡PCL一839作为步进电动机控制核心,用通用阵列逻辑(GAL)实现步进电动机环形脉冲分配器,通过在上位Pc机编制控制软件,实现了步进电动机起停、加减速和正反转的高速控制,详细描述了控制系统的硬件构成和软件实现流程.该控制方法直观、可靠,电路简单,适应性强。
关键词:步进电动机控制卡PcL一839;通用阵列逻辑;步进电动机;控制0引言步进电动机在数控机床、医疗器械、仪器仪表等自动或半自动设备中得到了广泛应用。
目前对步进电动机的控制大多采用DsP、单片机和PLc作为控制器,这些方法要求对DsP、单片机或PLc的编程语占熟悉,还需要扩充显示电路和键盘,硬件没计和软件编程也相对复杂,控制不够灵活。
为了简化硬件设计,实现灵活控制,本文选用研华步进电动机控制卡PcL一839取代单片机、DsP或PLc,采用高级语言设计控制界面,提高了控制精度和可靠性,同时方便操作和显示。
另一方面,步进电动机的控制系统必须具有脉冲产生、环形脉冲分配和功率放大三个环节。
早期的环形脉冲分配器大多由分散器什组成,存在器件延时,并且电路复杂,可靠性差。
目前主要有软件环形脉冲分配器和专用集成芯片环形脉冲分配器。
前者具有速度低的缺点;后者集成度高,可靠性好,但其适应性受到限制。
因此,本文在使用PcL一839产生控制脉冲的同时,采用通用阵列逻辑(cAL)构成环形脉冲分配器,具有结构简单、可靠性高和成本低1控制系统组成。
三轴高速步进电动机控制卡PcL 839通过TsA总线插在工控机TPc 的插槽内,并通过37针D型电缆与lPc相连接。
由于PCL一839是基于IAS总线的,在使用之前需通过控制卡上的DIP开关重新设置16个1/O的基地址,保证16路I/O地址连续,同时避免与Pc机系统中其他I/O设备地址冲突。
GAL环形脉冲分配器主要由可编程逻辑器件GAL组成,以LATcE公司的GALl6V8芯片为核心,接收来自控制卡的脉冲信号和方向信号,输出按一定时序排列的四路脉冲信号,这四路信号经驱动电路放大后控制四相步进电动机的运转。
文献综述电气工程及其自动化步进电动机的微机控制前言:进电动机属于DC驱动的同步电动机,它是纯粹的数字控制电动机。
它是将电脉冲激励信号转换成相应的角位移或线位移的离散值控制电动机,这种电动机每当输入一个电脉冲就动一步,所以又称脉冲电动机。
近30年来,数字技术、计算机技术和永磁材料的迅速发展推动了步进电动机的发展,为步进电动机的应用开辟了广阔的前景。
步进电动机系统是由步进电动机及其驱动控制电路构成的。
近二十年来,电力电子技术、微电子技术和微处理器技术的飞速发展,极大地推动了步进电动机驱动控制技术的进步,并使之在不断完善中趋于成熟。
步进电动机驱动控制技术的发展,在使得步进电动机系统获得更加广泛应用的同时,也使得步进电动机与其驱动电路装置日益成为不可分割的一个整体。
步进电动机驱动电路的合理设计与改进,需要对步进电动机运行机理和具体结构设计的透彻了解与深入分析。
同时,步进电动机系统的性能和运行品质在很大程度上取决于其驱动电路的结构与性能,同一台电动机配以不同类型的驱动电路,其性能会有较大差异。
抛开驱动电路来谈步进电动机的性能是不完全的。
步进电动机主要用于数字控制系统中,精度高,运行可靠。
如采用位置检测和速度反馈,亦可实现闭环控制。
步进电动机已广泛地应用于数字控制系统中,如数模转换装置、数控机床、计算机外围设备、自动记录仪、钟表、和磁盘等等之中,另外在工业自动化生产线、印刷设备如打印机、绘图机等中亦有应用。
正文:国内外关于步进电动机的研究主要在它本身的性能提高,应用领域的不断拓广,电动机外形的改变和不同的更先进的控制方式。
1、步进电动机的发展历史与概要。
步进电动机的发展过程步进电动机的机理是基于最基本的电磁铁作用、其原始模型起源于1830年至1860年间。
1870午前后开始以控制为目的的尝试、应用于氮弧灯的电极输送机构中。
这被认为是最初的步进电动机。
此后,在电话自动交换机中广泛使用了步进电动机。
不久又在缺乏交流电源的船舶和飞机等独立系统中广泛使用。
20世纪60年代后期,在步进电动机本体方面随着水磁材料的发展,各种实用性步进电动机应运而生,而半导体技术的发展则推进了步进电动机在众多领域的应用。
在近30年间.步进电动机迅速地发展并成熟起来。
从发展趋向来讲、步进电动机已经能与直流电动机、异步电动机,以及同步电动机并列,从而成为电动机的一种基本类型。
我国步进电动机的研究及制造起始于本世纪50年代后期。
从50年代后期到60年代后期,主要是高等院校和科研机构为研究一些装置而使用或开发少量产品。
这些产品以多段结构三相反应式步进电动机为主。
70年代初期,步进电动机的生产和研究有所突破。
除反映在驱动器设计方面的长足进步外,对反应式步进电动机本体的设计研究发展到一个较高水平。
70年代中期至80年代中期为成品发展阶段,新品种高性能电动机不断被开发。
自80年代中期以来,由于对步进电动机精确模型做了大量研究工作,各种混合式步进电动机及驱动器作为产品广泛利用。
2、步进电动机的运行特点和步进电动机的分类。
步进电动机有如下的特点:步进电动机的的角位移与输入脉冲数严格成正比,因此,当它转一转后,没有累计误差,具有良好的跟随性。
由步进电动机与驱动电路组成的开环数控系统,既非常简单、廉价,又非常可靠。
同时,它也可以与角度反馈环节组成高性能闭环数控系统。
步进电动机的动态响应很快,易于启停、正反转及变速。
速度可在相当宽的范围内平滑调节,低速下仍能保证获得大转矩,因此一般可以不用减速器而直接驱动负载。
步进电动机只能通过脉冲电源供电才能运行它不能直接使用交流电源和直流电源。
步进电动机存在震荡和失真现象,必须对控制系统和机械负载采取相应措施。
步进电动机自身噪声和振动较大,带惯性负载的能力较差。
步进电机的分类步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
反应式:定子上有绕组、转子由软磁材料组成。
结构简单、成本低、步距角小,可达1.5°、但动态性能差、效率低、发热大,噪声和振动都很大。
永磁式:永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。
其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。
混合式:混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。
其特点是输出力矩大、动态性能好,步矩角小,但结构复杂、成本相对较高。
这种步进电机的应用最为广泛,性能最好。
步进电动机经过几十年的发展,已经成为除直流电动机和交流电动机以外应用最广泛的第三类电动机,在开环高分辨率系统中,至今还没有发现更适合取代它的产品,特别是在一些功率相当小的系统中,步进电动机更具有无可替代的主流地位。
预计未来步进电动机的研究还会持续下去,研究方向还会之一是电机与驱动的一体化,使步进电动机的体积更小巧、性能更优越,性价比更高,在大量的民用设备中批量化使用,如家庭机器人、民用智能化设备等;研究方向之二是在功率或机座号相对较大的步进电动机中,与属于BIDCM(稀土永磁无刷直流电机)的交流伺服电动机系统会和,具体来说可能会借鉴交流伺服电动机的特点,形成一种新的“步进伺服电动机”或“伺服步进电动机”,在克服低频率等方面取得突破性进展,从而在现代军事、精密机械加工、航空航天等领域的应用越来越深入。
3、反应式步进电机的工作原理和工作方式反应式步进电机的工作原理反应式步进电动机是以电磁力来作为电机运动的动力的。
转子在电磁力的作用下被推到最小磁阻也就是最大磁导率的位置,即定子小齿与转子小齿的位置对齐的时候,且这时转子处于平衡状态(如图3-2 (1)所示)。
在三相步进电动机运行时,某一相的磁极达到最大的磁导率的位置时,其余的两相磁极一定没有达到最大磁导率的位置,也就是定子小齿和转子小齿位置不对其的时候(如图3-2 (2)所示)。
反应式步进电机的工作方式三相反应式步进电机有三种工作方式:单三拍工作方式、双三拍工作方式、六拍工作方式。
三种工作方式主要是由对绕组通电时的不同顺序而产生的。
它们的通电顺序分别为A→B→C→A、AB→BC→CA、A→AB→B→BC→C→CA。
这其中,六拍工作方式在“高频性能”、“转矩”、“振荡”、“功耗”等项目方面性能比较好,而单三拍工作方式则较差。
因此,在实际使用中,六拍工作方式对提高步进电动机的工作性能有着很大的帮助。
4、单片机控制步进电机的研究单片机控制步进电动机是一种结合了软件与硬件的一种控制方法,它使用软件来实现对步进电动机输入脉冲的分配,使步进电动机的控制效果得到不少的提升。
并且,在当今社会生产发展越来越先进,自动化控制的程度越来越高,而单片机以其强大的功能,价格相对低廉,性价比高等优点而深受人们的信赖。
单片机对步进电动机的控制时通过控制信号来完成的,它主要的做用是对步进电动机换相的顺序控制,对步进电动机正反转的控制,对步进电动机转动速度的控制。
单片机控制步进电机有以下几个方面:对控制步进电机的脉冲的分配;对步进电机的转速的控制;对步进电机运行时加减速的控制;对步进电机运行时准确的位置的控制。
5、以单片机控制步进电机调速系统的实例来论证单片机控制系统的优点在实际的生产过程中,由于步进电动机启停频繁,如果控制不恰当,就会造成步进电动机的过冲和失步等现象。
因此,对于步进电动机的调速控制一直是研究的重点之一。
由于单片机控制有着功能强大,使用性强,控制精确且稳定性和可靠性高,适应能力强等一系列优点,所以,单片机一直是作为步进电机控制系统的核心,对步进电机的高性能稳定工作起到非常重要的作用。
这是一个步进电机调速系统的硬件框图其中,这里对单片机采用的是AT89C51 ,驱动电路使用的是恒流斩波驱动电路,电机使用的是三相反应式步进电动机。
显示芯片使用的是CD4511芯片,键盘使用的是设计的电路。
在系统中,利用了单片机的运算能力十分强大,以及可以编程的特点,实现了对步进电动机的复杂的调速能力。
在遇到不同的情况时,仅仅需要改变软件而不需要改变硬件电路,使这种方法具有适应能力极强的特点。
在控制时,也可以通过显示装置来方便的了解步进电机的具体的运行状态,使操作者对步进电机具体的工作情况能清楚的了解,并且,这里将两者进行结合,使系统的交互性大大增强。
在这里,单片机控制的步进电机调速系统具有下面的优点:系统的结构相对简单,成本较低;功能完善,对于一般所需求的加减速,正反转等功能都可以实现;一般情况下,只要改变软件就能适应不同的情况;对于步进电机的工作状态可以显示出,操作也简单;由于单片机抗干扰能力较强,在运行过程中,步进电机也能保持较为稳定的运行状态,可靠性高。
总结:本课题是步进电动机的微机控制,主要的研究的对象是反应式步进电动机,包括它的结构,工作原理,运行特点和不同工作方式下的单片机控制,以及单片机控制的调速系统运行状态。
由于控制系统在向着更加复杂、可靠性以及精确性要求更高的方向发展。
这就要求必须有更加先进的控制系统与之相适应。
微机自从出现以来,便以其集成度高、功能强、体积小、功耗低、价格廉、灵活方便等一系列优点。
现在微机的发展也促进了控制理论的发展。
而步进电动机主要用于数字控制系统中,精度高,运行可靠。
步已广泛地应用于数字控制系统中,如数模转换装置、数控机床、计算机外围设备、自动记录仪、钟表、和磁盘等等之中。
步进电动机的用途之广泛,微机控制的种种优点,使研究该课题,顺应数字化时代控制系统发展的潮流,对优化步进电动机的实际应用,提高步进电动机运行的可靠性,操作的简便性以及促进步进电动机控制系统的发展具有重要的意义。
[1] 王晓明.电动机的DSP控制[M].北京航空航天大学出版社,2009.8[2] 哈尔滨工业大学成都电机厂.步进电动机[M].科学出版社,1979[3] [日].坂本正文.步进电动机应用技术[M].科学出版社,2010[4] 王俊峰.实用电路手册[M].机械工业出版社.2009.12[5] 王晓明.电动机的单片机控制[M].北京航空航天大学出版社,2002[6] 郁汉琪.电气控制与可编程序控制器应用技术[M].南京.东南大学出版社,2003.[7] 方爱平.基于步进电机控制系统的设计与实现,2008,11[8] 张伯鹏等,先进制造技术基础研究现状及发展趋势[J],中国机械工程,1997.2,[9] 李忠杰,全守信.步进电动机应用技术[M].机械工业出版社,1998[10] 李国厚.步进电机驱动与控制系统的设计[J].煤矿机械,2008,29(2)[11] 王鸿钮.步进电机控制技术入门[M].同济大学出版社.1990[12] 刘国永,陈杰平.单片机控制步进电机系统设计.安徽:安徽技术师范学院学报,2002,16(4):61-63.[13] 周艳秋.步进电机控制定位技术的研究,2009.6.12[14] 刘宝廷.程树康.步进电动机及其驱动控制系统[M].哈尔滨工业大学出版社,1994[15] 王鸿钰.步进电机控制技术入门[M].同济大学出版社,1990[16] 吴金戌,沈庆阳,郭庭吉.8051单片机实践与应用[M].清华大学出版社,2002[17] 余建国.基于单片机的步进电动机调速的控制方法[J].电气时代,2006(4):104-108[18] 丁伟雄等.步进电机的控制原理及其单片机控制实现[J].煤矿机械,2005[19] 刘兴辉,毕国玲.步进电机的单片机控制系统研制[J].辽宁大学学报,2007.34(4)[20] 徐益民.步进电机的单片机控制系统的设计[J].煤矿机械,2005[21] 李国厚.步进电机驱动与控制系统的设计[J].煤矿机械,2008.29(2)[22] Albert C.Leenhouts.Smooth Step Motor Motion With Half Driver.Allllual SmPosiumon IMCSD.1995,24(2)[23] S.J.Bailey.Lessening the Gap Between Incremental and Continuous motionControl.Control Engineering.1987,2:72-76。