第十三章 步进电动机传动控制系统
- 格式:doc
- 大小:37.00 KB
- 文档页数:2
《机电传动控制》课程学习指导书课程学习方法指导《机电传动控制》是机械类、机械电子工程(机电一体化)等专业的一门主干技术基础课。
本课程的先修课程主要有电路、模拟电子技术、数字电子技术等。
本课程学习的基本要求是:(1)了解机电传动控制系统的组成,掌握机电传动的基本规律;(2)掌握常用电机、电器、晶闸管及其基本电路的基本工作原理、主要特性,了解其应用与选用;(3)掌握继电器-接触器控制、可编程控制器的基本工作原理,学会用它们来实现生产过程的自动控制;(4)学会分析机电传动控制系统的基本方法。
本课程学习时,首先要了解问题是如何提出的,特别是注意对基本物理概念、基本工作原理、基本公式的理解和掌握,学会分析问题的方法和思路,注意各个部分内容之间的联系,了解其应用;而后做课程指导书中的相关自测题目,用以检验对所学内容的掌握程度;同时应合理安排学习时间,按照计划阅读教材,提高学习效率。
课程学习进度安排本课程学习时建议每周完成3~4个学时。
并认真阅读本课程指导书、完成相关自测题目。
具体进度可参照下列学时分配进行第一章概述(1学时)第二章机电传动系统的动力学基础(3学时)第三章直流电机的工作原理及特性(5学时)第四章交流电动机的工作原理及特性(6学时)第五章继电器—接触器控制系统(4学时)第六章可编程序控制器PLC(5学时)第七章电力电子学—晶闸管及其基本电路(5学时)第八章步进电动机传动控制系统(3学时)课程学习课时分配第一章概述(1学时)1) 机电传动的目的和任务2) 机电传动及其控制系统的发展概况3) 课程的性质、任务及其总体安排第二章机电传动系统的动力学基础(3学时)1) 机电传动系统的运动方程式2) 转矩、转动惯量和飞轮转矩的折算3) 生产机械的机械特性4) 机电传动系统稳定运行的条件第三章直流电机的工作原理及特性(5学时)1) 直流电机的基本结构和工作原理2) 直流发电机3) 直流电动机的机械特性4) 直流他励电动机的启动、调速、制动特性第五章交流电动机的工作原理及特性(6学时)1) 三相异步电动机的结构和工作原理2) 三相异步电动机的定子电路和转子电路3) 三相异步电动机的转距与机械特性4) 三相异步电动机的启动、调速、制动特性5) 单相异步电动机6) 同步电动机的工作原理、特点及应用第八章继电器—接触器控制系统(4学时)1) 常用控制电器与执行电器2) 继电器—接触器控制的常用基本线路3) 继电器—接触器控制线路举例及设计简介第九章可编程序控制器PLC(5学时)1) 可编程序控制器的基本结构、工作原理和主要特点2) 可编程序控制器的内部等效继电器电路3) 可编程序控制器的编程和指令系统4) 可编程序控制器的应用第十章电力电子学—晶闸管及其基本电路(5学时)1) 电力半导体器件2) 单相可控整流电路3) 三相可控整流电路4) 逆变器第十二章步进电动机传动控制系统(3学时)1) 步进电动机2) 步进电动机的计算机控制3) 步进电动机的驱动电路第一章绪论(略)第二章机电传动系统的动力学基础2.1 本章学习目标1.理解多轴拖动系统中转矩和转动惯量的折算,了解集中典型的生产机械的机械特性;2.熟练掌握机电传动系统的运行方程式,转矩和转动惯量的折算原则,机电传动系统稳定运行的条件;3.能运用机电传动系统稳定运行的条件,分析和判别系统的稳定平衡点。

第13章步进电动机传动控制系统教学内容13.1 步进电动机13.2 步进电动机的环形分配器13.3 步进电动机的驱动电路13.4 步进电动机的运行特性及选用中应注意的问题教学安排本章安排2个学时,采用多媒体授课。
知识点及其基本要求1.掌握步进电动机步矩角和步进电动机转速的数学表达式及其物理意义;2.掌握步进电动机的结构、运行特性及影响因素。
重点和难点重点掌握步进电动机的通电方式和主要性能指标。
难点步进电动机的矩角特性和矩频特性。
教学设计1.了解步进电动机的结构和工作原理,掌握步进电动机的通电方式和求解步距角与转速的公式。
步进电机是将电脉冲信号转变为角位移或线位移的机电执行元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
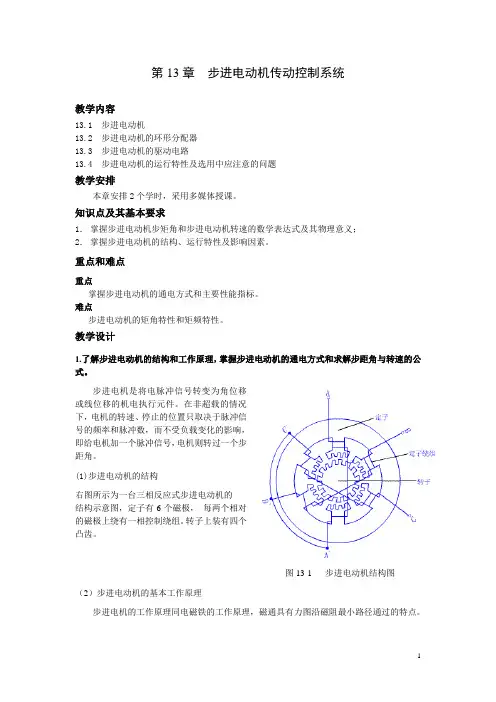
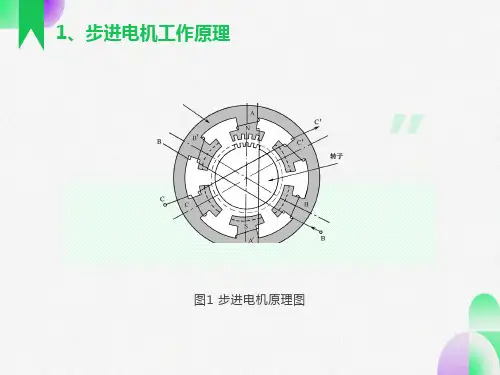
(1)步进电动机的结构右图所示为一台三相反应式步进电动机的结构示意图,定子有6个磁极,每两个相对的磁极上绕有一相控制绕组。
转子上装有四个凸齿。
图13-1 步进电动机结构图(2)步进电动机的基本工作原理步进电机的工作原理同电磁铁的工作原理,磁通具有力图沿磁阻最小路径通过的特点。
图13-2 三相反应式步进电动机的工作原理图通电顺序A-B-C-A,转子便按顺时针方向一步步转动。
每换接一次,转子前进一个步距角。
通电顺序改为A-C-B-A便可反向旋转。
(3)步进电机的通电方式三相单三拍通电顺序:A-B-C-A或A-C-B-A,步距角30度(齿距90度)特点:每次只有一相控制绕组通电吸引转子,易引起在平衡位置振荡,稳定性差,绕组通电换极时易失步。
双三拍通电顺序:AB-BC-CA-AB或反过来,步距角30度(齿距90度)特点:始终有两相通电,感应力矩大,静态误差小,定位精度高,工作稳定,不易失步。
三相六拍通电顺序:A-AB-B-BC-C-CA-A步,距角15度(齿距90度)或A-AB-B-BC-C-CA-A特点:单、双相轮流通电,通电状态增加一倍、步距角减少一半,但具有双三拍的特点。

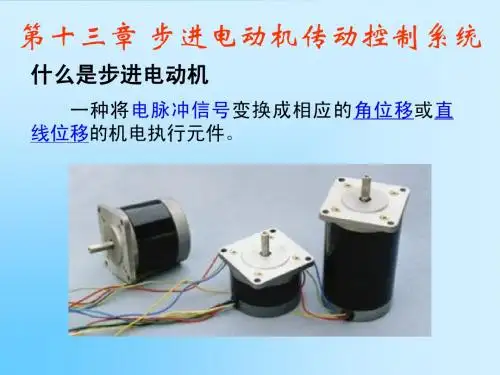
步进电机传动控制系统1.步进电机的定义步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
2.步进电机的优点(1)步距值不受各种干扰因素的影响。
(只要电压在工作范围内)如电压的大小,电流的数值、波形、温度的变化等。
(2)误差不长期积累。
步进电机每走一步所转过的角度与理论步距之间总有一定的误差,从某一步到任何一步,也总有一定的累积误差,但是,每转一圈的累积误差为零,所以步距的累积误差不是长期的累积下去。
(3)控制性能好,启动、停车、翻转都是在少数脉冲内完成,在一定的频率范围内运行时,任何运动方式都不会丢失一步。
所以,步进电机被广泛应用于数控机床上。
3.步进电机的缺点(1)力量小,承受的载荷比较小。
(2)失步会引起控制误差,转速有限。
4.步进电机的种类步进电动机分为反应式、永磁式及混合式三种基本类型。
(1)反应式定子上有绕组、转子由软磁材料组成。
结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。
(软磁材料加磁场既容易磁化,又容易退磁,即矫顽力很低的磁性材料。
)(2)永磁式永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。
其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。
(永磁材料磁性硬是指磁性材料经过外加磁场磁化以后能长期保留其强磁性,其特征是矫顽力高。
)(2)混合式混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。
第十三章步进电动机传动控制系统、通过分析步进电动机的工作原理和通电方式,可得出哪几点结论答:步进电动机的位移量与输入脉冲数严格成正比,这就不会引起误差的积累,其转速与脉冲频率和步矩角有关。
控制输入脉冲数量、频率及电动机各组的接通次序,可以得到各种需要的运行特征。
、步进电动机的运行特性与输入脉冲频率有什么关系答:当脉冲信号频率很低时,控制脉冲以矩形波输入,电流比较接近于理想的矩形波。
如果脉冲信号频率增高,由于电动机绕组中的电感有阻止电流变化的作用,因此电流波形发生畸变。
如果脉冲频率很高,则电流还来不及上升到稳定值就开始下降,于是,电流的幅值降低,因而产生的转矩减小,致使带负载的能力下降。
故频率过高会使步进电动机启动不了或运行时失步而停下。
因此,对脉冲信号频率是有限制的。
、列出三相六拍环形分配器的反向环形分配表。
、试修改环形分配器子程序,以实现步进电动机的反向运转。
答:反转子程序如下:HXFB: LD A,BCP A,03HJR Z,DYYINC AJR ROUTDYY: LD A,00HROUT: LD L,ALD L,00HADD HL,KLD A,(HL)OUT (PIODRA),ARET、步进电动机对驱动电路有何要求常用驱动电路有什么类型各有什么特点答:步进电动机的驱动电路实际上是一种脉冲放大电路,使脉冲具有一定的功率驱动能力。
由于功率放大输出直接驱动电动机绕组,因此,功率放大电路的性能对步进电动机的运行性能有很大的影响。
因此,对驱动电路要求的核心问题是如何提高步进电动机的快速性和平稳性。
常用的驱动电路类型有:1、单电压限流型驱动电路。
电阻R上有功率消耗。
为了提高快速性,需要加大R的阻值,随着阻值的加大,电源的电压也势必提高,功率消耗也进一步加大,正因为这样,此电路使用受到限制。
2、高低压切换型驱动电路。
优点是功耗小,启动力矩大,突跳频率和工作频率高。
缺点是大功率管的数量要多一倍,增加了驱动电源。
第十三章步进电动机传动控制系统
13.1、通过分析步进电动机的工作原理和通电方式,可得出哪几点结论?
答:步进电动机的位移量与输入脉冲数严格成正比,这就不会引起误差的积累,其转速与脉冲频率和步矩角有关。
控制输入脉冲数量、频率及电动机各组的接通次序,可以得到各种需要的运行特征。
13.2、步进电动机的运行特性与输入脉冲频率有什么关系?
答:当脉冲信号频率很低时,控制脉冲以矩形波输入,电流比较接近于理想的矩形波。
如果脉冲信号频率增高,由于电动机绕组中的电感有阻止电流变化的作用,因此电流波形发生畸变。
如果脉冲频率很高,则电流还来不及上升到稳定值就开始下降,于是,电流的幅值降低,因而产生的转矩减小,致使带负载的能力下降。
故频率过高会使步进电动机启动不了或运行时失步而停下。
因此,对脉冲信号频率是有限制的。
13.3、列出三相六拍环形分配器的反向环形分配表。
13.4、试修改环形分配器子程序,以实现步进电动机的反向运转。
答:反转子程序如下:
HXFB:LD A,B
CP A,03H
JR Z,DYY
INC A
JR ROUT
DYY: LD A,00H
ROUT: LD L,A
LD L,00H
ADD HL,K
LD A,(HL)
OUT (PIODRA),A
RET
13.5、步进电动机对驱动电路有何要求?常用驱动电路有什么类型?各有什么特点?
答:步进电动机的驱动电路实际上是一种脉冲放大电路,使脉冲具有一定的功率驱动能力。
由于功率放大输出直接驱动电动机绕组,因此,功率放大电路的性能对步进电动机的运行性能有很大的影响。
因此,对驱动电路要求的核心问题是如何提高步进电动机的快速性和平稳性。
常用的驱动电路类型有:1、单电压限流型驱动电路。
电阻R上有功率消耗。
为了提高快速性,需要加大R的阻值,随着阻值的加大,电源的电压也势必提高,功率消耗也
进一步加大,正因为这样,此电路使用受到限制。
2、高低压切换型驱动电路。
优点是功耗小,启动力矩大,突跳频率和工作频率高。
缺点是大功率管的数量要多一倍,增加了驱动电源。
13.6、使用步进电动机需注意哪些主要问题?
答:(1)驱动电源的优劣对步进电动机控制系统的运行影响极大,使用时要特别注意,需根据运行要求,尽量采用先进的驱动电源,以满足步进电动机的运行性能。
(2)若所带负载转动惯量较大,则应在低频下启动,然后再上升到工作频率,停车时也应从工作频率下降到适当频率再停车。
(3)在工作过程中,应尽量避免由于负载突变而引起误差。
(4)若在工作过程中发生失步现象,首先应检查负载是否过大,电源电压是否正常,再检查驱动电源输出波形是否正常,在处理问题时不应随便更换元件。
13.7、步进电动机的步距角之含义是什么?一台步进电动机可以有两个步距角,例如,
3°/1.5°,这是什么意思?什么是单三拍、单双六拍和双三拍?
答:每当输入一个电脉冲时,电动机转过的一个固定的角度称为步矩角。
一台步进电动机有两个步矩角,说明它有两种通电方式,3°的意思是相邻两次通电的相的数目相同时的步矩角,1.5°的意思是相邻两次通电的相的数目不同时的步矩角。
单三拍:每次只有一相绕组通电,而每个循环只有三次通电。
单双六拍:第一次通电有一相绕组通电,然后下一次有两相通电,这样交替循环运行,而每次循环只有六次通电。
双三拍:每次有两相绕组通电,每个循环有三次通电。
13.8、一台五相反应式步进电动机,采用五相十拍运行方式时,步距角为1.5°,若脉冲电
源的频率为3000Hz,试问转速是多少?
解:步进电动机的转速为:n=βf*60/360=1.5*3000*60/360=750r/min
13.9、一台五相反应式步进电动机,其步距角为1.5°/0.75°,试问该电机的转子齿数是多少?解:因为步矩角β=360/ZKm
所以Z=360/(Kmβ)=360/(1*5*0.5)=48
即电机的转子齿数是48。
13.10、步距角小、最大静转矩大的步进电动机,为什么启动频率和运行频率高?
答:根据转速公式n=βf*60/2π可知,f=nπ/β*30。
所以步矩角β越小运行频率f就越高,启动频率相应地也高。
在负载转矩一定的情况下,最大静转矩越大,电流的幅值越大,高频虽然会造成电动机的启动转矩减小,但仍可能大于负载转矩。
因此最大静转矩大的步进电动机,启动频率和运行频率越高。
13.11、负载转矩和转动惯量对步进电动机的启动频率和运行频率有什么影响?
答:负载转矩和转动惯量越大,步进电动机的启
T/N·m
动频率和运行频率越低。
矩频特性如右图所
示。
f/Hz。