4.8 步进电动机
- 格式:ppt
- 大小:295.00 KB
- 文档页数:22

四项八拍电机工作原理一、电机的基本原理在了解四项八拍电机(Stepper Motor)的工作原理之前,我们需要先了解电机的基本原理。
电机是将电能转化为机械能的设备,它通过电磁力的作用产生转动或线性运动。
电机的基本构成包括定子和转子。
定子是电机中静止不动的部分,通常由线圈绕成。
转子则是电机中旋转的部分,通常由磁性材料制成。
电机的工作原理可以归纳为两个基本原理:电磁感应和洛伦兹力。
电磁感应原理指的是通过电流在磁场中运动时,会产生力和力矩的效应。
洛伦兹力则是指导电流通过磁场时,会受到力的作用。
二、四项八拍电机介绍四项八拍电机是一种步进电机,它是由多个电磁线圈组成的电机。
四项八拍电机的名称中的“四项”指的是电机中包含的线圈数目,而“八拍”则指的是电机旋转一圈所需要的步数。
四项八拍电机的结构中,有四个线圈分布在电机的定子上。
每个线圈可以分为两段,因此共有八个端子。
通过对这些线圈施加适当的电流,可以在电机中产生旋转或线性运动。
三、四项八拍电机的工作原理四项八拍电机的工作原理基于步进电机的特点,即通过逐步施加电流来引起电机转动。
下面将详细介绍四项八拍电机的工作原理。
1. 单相激励状态在四项八拍电机的工作过程中,只有一个线圈处于激励状态。
将所有的线圈进行编号,分别为A、B、C、D。
四个线圈按照顺时针顺序依次激励,即先激励A相,然后依次激励B相、C相和D相。
在单相激励状态下,电机只能按照A→B→C→D→A的顺序旋转。
每次只有一个线圈被激励,而其他线圈则处于断开状态。
2. 双相激励状态在双相激励状态下,四项八拍电机的两个线圈同时被激励。
这样可以提供更强的力矩,使电机能够承受更大的负载。
双相激励状态下,可以通过不同的线圈组合来控制电机的旋转方向和速度。
常见的组合包括AB、BC、CD和DA。
3. 步进角度四项八拍电机的步进角度取决于线圈数目和旋转方向。
在正常工作状态下,四项八拍电机的步进角度为360度除以线圈数目,即步进角度为90度。
四相八拍步进电机工作原理
步进电机(Steppermotor)是一种特殊的电机,它可以按照我们预先定义的计步模式控制旋转角度,属于非精密步进电机。
由于采用了驱动电路和细节控制参数,我们能够非常精确地控制四相八拍步进电机的旋转转角,这种对小角度变化的精确控制使得步进电机在微处理器和其它微电机控制系统中得到越来越广泛的应用。
二、四相八拍步进电机的工作原理
1、四相八拍直流步进电机的结构
四相八拍直流步进电机是指具有四相的直流步进电机,它的结构是由两个匝的外圈和内圈组成,其中外圈是由两相组成,内圈是由另外两相组成,每两相之间相隔90度,其中包含的相数达到四相八拍,就是每两圈中包含的相位数都是八拍,也就是每一拍的角度为45度。
2、控制四相八拍直流步进电机的方法
四相八拍直流步进电机的控制方法采用了双驱动的脉冲分配控制,即通过双步进电机驱动器,同时将一系列脉冲信号分配给两台步进电机,从而同时驱动两台步进电机,从而达到步进电机运动的控制效果。
其中,双步进电机驱动的脉冲信号控制时序为:外圈首先升高一拍,再延迟一拍,然后内圈升高一拍,延迟一拍,依次重复,实现步进电机的运动控制。
- 1 -。
四相八拍步进电机控制电路
步进电机在各种自动控制领域中有着广泛的应用,它通过精确的位置控制和简单的控制电路设计,实现了高效的运行。
在步进电机中,四相八拍步进电机是一种常见的类型,它具有结构简单、控制方便等特点,因此得到了广泛采用。
步进电机的控制原理基于控制电路对电机内部各个线圈的通断控制,从而实现单步运动。
四相八拍步进电机由四个线圈组成,按相间夹角为90度的顺序连接,每相均可单独控制。
常见的步进电机控制电路包括单片机控制、逻辑门控制等。
在设计四相八拍步进电机控制电路时,首先需要确定电机驱动方式。
常见的方式包括全步进驱动和半步进驱动。
全步进驱动中,电机每步转动一个完整的步进角度;而在半步进驱动中,电机每步转动半个步进角度。
选择不同的驱动方式可以实现不同的转动精度和速度要求。
控制电路中常用的元器件包括晶体管、电阻、电容等。
通过合理的连接和控制,可以使步进电机按照预先设定的步进序列运行。
在具体设计电路时,需要根据电机的参数和工作要求,选择合适的元器件和控制方式,并进行电路调试和优化。
为了确保步进电机的稳定运行,还需要注意电源稳定性和线圩的连接质量。
稳定的电源可以提供电机正常工作所需的能量,而良好的线圩连接可以减小电机运行时的噪音和振动,延长电机使用寿命。
总的来说,四相八拍步进电机控制电路是实现步进电机精准运动的关键,通过合理的设计和调试,可以有效地实现对电机位置的控制。
在实际应用中,可以根据具体要求进行电路的定制设计,以满足不同场景下步进电机的控制需求。
1。
步进电机型号参数选择步进电机是一种能将数字脉冲信号转换为角位移或直线位移的电机。
它通过控制电流的连续变化实现位置控制,具有精度高、稳定性好、启停速度快等优点。
步进电机在许多领域中广泛应用,包括机械、电子设备、医疗器械等。
本文将介绍几种常见的步进电机型号、参数和选择方法。
一、步进电机型号1.42型步进电机42型步进电机是一种直径为42mm的经典步进电机。
它由两相或四相线圈组成,每一相的线圈可以通过一个电流控制芯片驱动。
42型步进电机具有结构简单、驱动电流小、噪音低等特点,广泛应用于一些小型机械设备中。
2.57型步进电机57型步进电机是一种直径为57mm的步进电机。
它由四相线圈组成,每一相的线圈可以通过一个电流控制芯片驱动。
57型步进电机具有结构稳定、扭矩输出大、运行平稳等特点,广泛应用于一些需要较大扭矩输出的场合。
3.86型步进电机86型步进电机是一种直径为86mm的大功率步进电机。
它由四相线圈组成,每一相的线圈可以通过一个电流控制芯片驱动。
86型步进电机具有功率大、运行平稳等特点,广泛应用于一些需要大功率输出的机械设备。
二、步进电机参数1.步距角:步进电机通常以步距角来描述,它表示每次接收一个脉冲信号时电机转动的角度。
常见的步距角有1.8度型和0.9度型。
1.8度型步进电机每个步距可以转动1.8度,0.9度型步进电机则可以转动0.9度。
2.额定电流:步进电机的额定电流是指电机在正常工作时所需的电流大小。
一般来说,额定电流越大,电机的输出扭矩就越大,但也会产生更多的热量。
3.驱动电压:步进电机的驱动电压是指电机在正常工作时所需的电压大小。
一般来说,驱动电压越高,电机的运行速度就越快,但也会增加驱动电路的复杂度。
4.静态扭矩:步进电机的静态扭矩是指在停止时所能提供的最大转矩。
它通常与步进电机的物理结构和线圈参数有关。
5.转动惯量:步进电机的转动惯量是指电机转动一定角度所需的转动力矩大小。
它通常与电机的转子质量和转子结构有关。
4相8拍步进电机工作原理
4相8拍步进电机工作原理:
步进电机是一种通过依次激励不同的电磁线圈来使转子转动的电机。
它的工作原理可以分为以下几个步骤:
1. 电机通电:步进电机需要接通电源才能正常工作。
通过给电机施加电源电压,电流被输送到电机的不同线圈上。
2. 电流激励:步进电机中的线圈被分为四组,分别为A、B、
C和D相。
每个相由多个线圈组成,这些线圈被连在一起并
以特定的方式绕绕在动转子上。
3. 电流方向:通过改变每个相的电流方向来控制步进电机的转向。
电流可以从逆时针或顺时针方向流过线圈。
4. 步进模式:步进电机通常以8拍或4拍两种模式工作。
在8
拍模式下,每个相都按照特定的顺序依次激励。
在4拍模式下,相的激励顺序会不同。
5. 磁场旋转:当电流通过相线圈时,会在周围产生一个磁场。
这个磁场会与电机中的永磁转子进行相互作用,导致转子发生旋转。
6. 转子转动:通过循环激励电机的不同相,可以使得转子以步进的方式进行旋转。
每次激励一个相,转子就会转动一个固定的角度(通常为1.8度,对应于8拍模式)。
7. 控制方式:步进电机可以通过使用特定的控制器或驱动器来控制其旋转步长、转速和方向。
控制器会向驱动器发送信号,通过改变激励的相来控制电机的运行。
通过不断地循环激励不同相,步进电机可以实现相对准确的位置控制和连续的旋转运动,在自动化领域广泛应用于精密定位、自动化设备和机器人等方面。
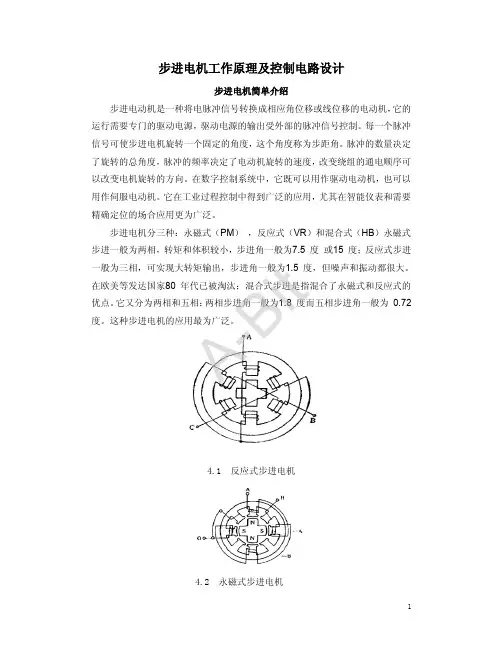
步进马达电机参数_步进电机减速规格(步进电机)按结构分类:步进电动机也叫脉冲电机,包括反应式步进电动机(VR)、永磁式步进电动机(PM)、混合式步进电动机(HB)等。
(1)反应式步进电动机:也叫感应式、磁滞式或磁阻式步进电动机。
其定子和转子均由软磁材料制成,定子上均匀分布的大磁极上装有多相励磁绕组,定、转子周边均匀分布小齿和槽,通电后利用磁导的变化产生转矩。
一般为三、四、五、六相;可实现大转矩输出(消耗功率较大,电流可达20A,驱动电压较高);步距角小(最小可做到10);断电时无定位转矩;电机内阻尼较小,单步运行(指脉冲频率很低时)震荡时间较长;启动和运行频率较高。
(2)永磁式步进电动机:通常电机转子由永磁材料制成,软磁材料制成的定子上有多相励磁绕组,定、转子周边没有小齿和槽,通电后利用永磁体与定子电流磁场相互作用产生转矩。
一般为两相或四相;输出转矩小(消耗功率较小,电流一般小于2A,驱动电压12V);步距角大(例如7.5度、15度、22.5度等);断电时具有肯定的保持转矩;启动和运行频率较低。
(3)混合式步进电动机:也叫永磁反应式、永磁感应式步进电动机,混合了永磁式和反应式的优点。
其定子和四相反应式步进电动机没有区分(但同一相的两个磁极相对,且两个磁极上绕组产生的N、S极性必需相同),转子结构较为多而杂(转子内部为圆柱形永磁铁,两端外套软磁材料,周边有小齿和槽)。
一般为两相或四相;须供应正负脉冲信号;输出转矩较永磁式大(消耗功率相对较小);步距角较永磁式小(一般为1.8度);断电时无定位转矩;启动和运行频率较高;进展较快的一种步进电动机。
1 / 1。
摘要步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
步进电机的调速一般是改变输入步进电机的脉冲的频率来实现步进电机的调速,因为步进电机每给一个脉冲就转动一个固定的角度,这样就可以通过控制步进电机的一个脉冲到下一个脉冲的时间间隔来改变脉冲的频率,延时的长短来具体控制步进角来改变电机的转速,从而实现步进电机的调速。
在本设计方案中采用单片机内部的定时器改变脉冲的频率从而实现对步进电机的转速进行控制,实现电机调速与正反转的功能。
关键词:步进电机,单片机,调速系统AbstractStep-by-step electric motor is the ring opening gating element changing electricity pulse signal into angular displacement or line displacement. Under the situation of must overload, the electric motor rotation rate , discontinuous location depend on pulse signal frequency and pulse number only , make free from being loaded with the effect changing ,but be that being added a pulse signal , the electric motor by electric motor is to have rotated a step spur angle. This gleam of location Step-by-step electric motor speed regulation general be change import step-by-step electric motor pulse frequency come true step-by-step electric motor speed regulation, because of step-by-step electric motor every be given to a pulse right away rotate one fixed angle, such right away not bad pass under the control of step-by-step electric motor a pulse arrive at next pulse period come to change pulse frequency Come to control the speed regulation ,Frequency adopt the internal timer of realizing an electric motor and the function that the positive and negative rotates being in progress to step-by-step electric motor rotation rate thereby.Key Words: Step-by-step electric motor , monolithic machine , speed regulation system目录摘要------------------------------------------------------------------------------------------------------------- I ABSTRACT --------------------------------------------------------------------------------------------------- II 第1章绪论 ---------------------------------------------------------------------------------------------- 1 1.1步进电机的概述-------------------------------------------------------------------------------------- 11.1.1 步进电机的特点----------------------------------------------------------------------------- 11.1.2 步进电机的工作原理简述-------------------------------------------------------------------- 11.1.3 步进电机的基本参数-------------------------------------------------------------------------- 11.1.4 步进电机调速原理简述----------------------------------------------------------------------- 2 1.2四相八拍步进电机---------------------------------------------------------------------------------- 21.2.1四相步进电机工作原理 ----------------------------------------------------------------------- 21.2.2 八拍得工作方式 -------------------------------------------------------------------------------- 4 1.3单片机概述 -------------------------------------------------------------------------------------------- 41.3.1 单片机原理简述 -------------------------------------------------------------------------------- 41.3.2 8031单片机 ------------------------------------------------------------------------------------- 5 1.4总体方案设计 ----------------------------------------------------------------------------------------- 61.4.1 系统的组成 -------------------------------------------------------------------------------------- 61.4.2 系统的工作原理 -------------------------------------------------------------------------------- 6 第2章硬件设计----------------------------------------------------------------------------------------- 72.1A/D转换器选择-------------------------------------------------------------------------------------- 72.1.1 MC14433A/D转换器简介 ---------------------------------------------------------------------- 72.1.2 MC14433各类引脚的功能--------------------------------------------------------------------- 7 2.2外部程序存储器的扩展 --------------------------------------------------------------------------- 8 2.3片外数据存储器的扩展----------------------------------------------------------------------------- 9 2.4脉冲分配器的选择 --------------------------------------------------------------------------------- 10 2.5键盘与显示选择------------------------------------------------------------------------------------ 12 2.6六反向器的设计------------------------------------------------------------------------------------ 13 2.7逻辑电路---------------------------------------------------------------------------------------------- 142.7.1地址锁存器的设计---------------------------------------------------------------------------- 142.7.2地址译码器的选择---------------------------------------------------------------------------- 142.8报警电路设计 --------------------------------------------------------------------------------------- 15 2.9掉电保护电路设计 --------------------------------------------------------------------------------- 16 2.10光电隔离 -------------------------------------------------------------------------------------------- 17 2.11光电传感器----------------------------------------------------------------------------------------- 17 2.12步进电机的加减速控制 ------------------------------------------------------------------------- 18 第3章系统软件设计 ------------------------------------------------------------------------------ 203.1显示子程序的设计-------------------------------------------------------------------------------- 20 3.2键盘子程序的设计--------------------------------------------------------------------------------- 22 3.3正反转程序流程图--------------------------------------------------------------------------------- 253.3.1 正反转程序流程图--------------------------------------------------------------------------- 253.3.2 转速快慢程序流程图 ---------------------------------------------------------------------- 28 3.4定时中断流程图------------------------------------------------------------------------------------ 30 3.5语音报警系统-------------------------------------------------------------------------------------- 33 3.6A/D转换器中断程序------------------------------------------------------------------------------- 35 3.7主程序设计 ------------------------------------------------------------------------------------------ 37 第4章结论 ---------------------------------------------------------------------------------------------- 40 参考文献 --------------------------------------------------------------------------------------------------- 41 致谢----------------------------------------------------------------------------------------------------------- 42第1章绪论1.1 步进电机的概述1.1.1 步进电机的特点1)一般步进电机的精度为步进角的3-5%,且不累积。
步进电机的选型与计算步进电机是一种常见的电动机类型,广泛应用于各种自动控制系统中。
步进电机以其结构简单、运动精确和控制方便的特点,被广泛应用于打印机、数控机床、机器人等领域。
在选择步进电机和进行计算时,需要考虑以下几个方面:步进角度、扭矩、电流、电压、转速和加速度。
本文将对步进电机的选型和计算进行详细介绍。
1.步进角度选择步进电机通常有两种步进角度可选:1.8度和0.9度。
其中1.8度步进角度的电机更为常见,但如果需要更高的运动精度,可以选择0.9度步进角度的电机。
步进角度越小,电机一圈的步数越多,运动精度也就越高。
2.扭矩选择扭矩是步进电机的输出能力,通常由电机的尺寸和电流决定。
选择合适的扭矩需要考虑应用场景下的负载情况。
如果负载较大或需要较大的运动力矩,需要选择具有较大扭矩的电机。
3.电流选择4.电压选择选择步进电机的电压需要考虑到驱动器的额定电压。
步进电机的电压应该与驱动器能够提供的电压匹配,以确保电机正常工作。
通常,选择合适的电压可以提高电机的响应速度和运动精度。
5.转速和加速度选择在进行步进电机的计算时,可以根据具体的参数和公式进行计算。
以下是步进电机常用的几个计算公式:1.步进电机的转速计算公式:转速 = 频率× 步进角度× 60(单位:rpm)2.步进电机的转矩计算公式:转矩=功率/转速(单位:Nm)3.步进电机的加速度计算公式:加速度 = (最终速度 - 初始速度)/ 时间(单位:rad/s²)这些公式可以根据具体的参数进行灵活计算,以满足不同应用场景的需求。
总结起来,步进电机的选型和计算需要考虑步进角度、扭矩、电流、电压、转速和加速度等因素。
根据具体的应用场景需求,选择合适的步进电机,并进行相关参数的计算,以满足项目的设计要求。
步进电动机的特性参数及挑选
1.步进电动机的首要特性参数(1)步距角a 每输入一个电脉冲信号,转子所转过的视点称为步距角。
步进电动机的步距角可按下式核算:a = 360°/mkz(2)静态步距角过失△a 步进电动机的实习步距角与理论步距角之差称为静态步距角过失。
(3)最大静转矩Tmax 使转子刚刚脱离平衡方位的极限转矩值称为最大静转矩。
(4)空载起动频率fq 电动机在空载状况下,不失步起动所能容许的最高频率称为空载起动频率。
(5)接连作业最高作业频率(矩频特性)步进电动机起动后,电动机速度能跟从操控脉冲频率接连上升而不失步作业的频率称为接连作业频率。
2.步进电动机的挑选(1)有必要确保步进电动机的输出转矩大于负载转矩,使电动机的矩频特性有必定裕量,以确保作业牢靠;(2)央求核算的机械体系负载翻滚惯量与步进电动机转子的翻滚惯量相匹配,并有必定裕量;(3)使最高接连作业频率能满意商品活络移动的央求;(4)使步进电动机的步距角a与机械体系相匹配,以得到机床所央求的脉冲当量。
1。
步进电机细分4,8,16 ,32,64,128,256什么意思?步进电机的细分技术实质上是一种电子阻尼技术,其主要目的是减弱或消除步进电机的低频振动,提高电机的运转精度只是细分技术的一个附带功能。
比如对于步进角为1.8°?的两相混合式步进电机,如果细分驱动器的细分数设置为4,那么电机的运转分辨率为每个脉冲0.45°,电机的精度能否达到或接近0.45°,还取决于细分驱动器的细分电流控制精度等其它因素。
不同厂家的细分驱动器精度可能差别很大;细分数越大精度越难控制。
步进电机驱动器的细分数。
常规有三种细分方法
1、2的N次方,如
2、4、8、16、32、64、128、256细分,
2、5的整数倍,如5、10、20、25、40、50、100、200细分,
3、3的整数倍,如3、6、9、12、2
4、48细分。
几细分就相当于“控制精度”增加了几倍(每个脉冲所使电机转动的角度就小了,执行过程中丢几个脉冲所产生的误差就小了,控制精度就高了),要是想保持速度不变,那频率就要增大相应的倍数。
例如原来电机转一圈用200个脉冲,你做了2细分,那么电机转一圈就要400 (200*2)个脉冲了
一般细分有 2 4 8 16 32
可能也有64 128的。
一般加细分是为了提高控制精度,但细分是电脉冲状态的增加来实现提高精度的,其实细分也存在误差,但是机械制造精度也有误差,这是不能完全避免的。
如果没有细分,那么步进电机每接受一个脉冲,就会转动一个步距角。
加入驱动器的细分后,则每发出一个脉冲,电机旋转的角度=步距角/细分数。