三相鼠笼异步电机正反转及能耗制动课程设计终稿
- 格式:doc
- 大小:133.56 KB
- 文档页数:6

三相鼠笼式异步电动机正反转及能耗制动电气控制系统班级学号:2010084030001 姓名:陈国强2010084030002 郭兴2010084030003 谌鸿强一、系统设计方案异步电机主要用作电动机,拖动各种生产机械。
异步电动机的优点是结果简单、容易制造、价格低廉、运行可靠、坚固耐用、运行效率较高且适用性强,缺点是功率因数较差。
三相异步电动机启动过程中会出现较大的电流,对电动机本身会有一定的影响。
由于异步电动机不存在换向问题,对不频繁启动的异步电动机来说,短时大电流没什么关系;对频繁启动的异步电动机,频繁出现短时大电流会使电动机内部过热,但是,只要限制每小时最高启动次数,电动机还是能承受的。
因此,只考虑电动机本身,是可以直接启动的。
但下面两种情况下,三相异步电动机直接启动是不可行的:①变压器与电动机容量之比不足够大;②启动转矩不能满足要求。
对于第①种情况,需要减小启动电流,第②种情况需要加大启动转矩。
本设计中不属于以上两种情况且不存在频繁启动的问题,故采用直接启动。
对于鼠笼异步电动机的控制方式有多种,常见的有PLC控制盒传统继电器控制,这里采用PLC控制方式。
主要设计步骤如下:1、主电路设计2、电路参数估算3、根据参数选择元器件4、PLC控制电路设计5、PLC控制编程软件6、调试运行二、电动机主电路设计根据要求,主电路设计如图1。
初始时,机械手停靠在左边,SQ1为ON,当QF闭合时,按下启动开关SB1,则继电器KM1得电,电机正转,机械手向右运动至工位1,触发行程开关SQ2使之转为ON状态,则继电器KM3得电,电机停转,并在该位置停靠6秒,然后再继续前进至工位2,触发行程开关SQ3使之转为ON状态,同样继电器KM3得电,电机停转,并在该位置停靠6秒,然后电机反转,退回至初始位置。
主电路中H1,H2分别为左右极限报警灯,若机械手运动到极限左右位置时,触发极限位置开关,则KM3,KM4,KM5得电,电机停转,并且报警器得电报警。
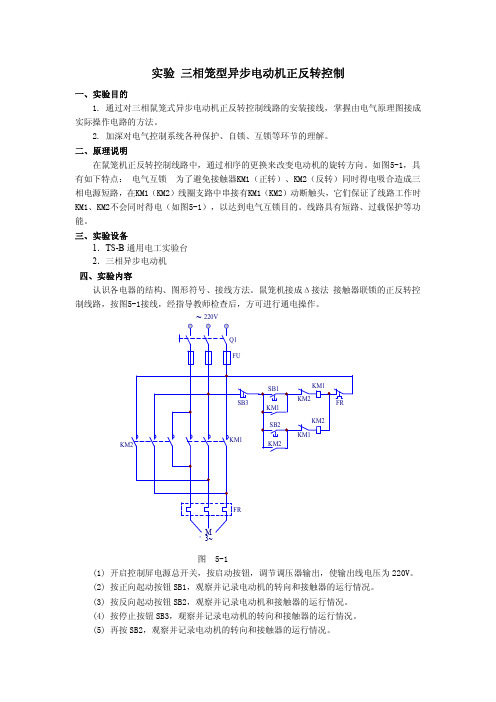
实验三相笼型异步电动机正反转控制
一、实验目的
1.通过对三相鼠笼式异步电动机正反转控制线路的安装接线,掌握由电气原理图接成实际操作电路的方法。
2.加深对电气控制系统各种保护、自锁、互锁等环节的理解。
二、原理说明
在鼠笼机正反转控制线路中,通过相序的更换来改变电动机的旋转方向。
如图5-1,具有如下特点:电气互锁为了避免接触器KM1(正转)、KM2(反转)同时得电吸合造成三相电源短路,在KM1(KM2)线圈支路中串接有KM1(KM2)动断触头,它们保证了线路工作时KM1、KM2不会同时得电(如图5-1),以达到电气互锁目的。
线路具有短路、过载保护等功能。
三、实验设备
1.TS-B通用电工实验台
2.三相异步电动机
四、实验内容
认识各电器的结构、图形符号、接线方法。
鼠笼机接成Δ接法接触器联锁的正反转控制线路,按图5-1接线,经指导教师检查后,方可进行通电操作。
220V
3~
图5-1
(1)开启控制屏电源总开关,按启动按钮,调节调压器输出,使输出线电压为220V。
(2)按正向起动按钮SB1,观察并记录电动机的转向和接触器的运行情况。
(3)按反向起动按钮SB2,观察并记录电动机和接触器的运行情况。
(4)按停止按钮SB3,观察并记录电动机的转向和接触器的运行情况。
(5)再按SB2,观察并记录电动机的转向和接触器的运行情况。
(6)实验完毕,按控制屏停止按钮,切断三相交流电源。
五、分析讨论
1、在电动机正、反转控制线路中,为什么必须保证两个接触器不能同时工作?采用哪些措施可解决此问题,这些方法有何利弊,最佳方案是什么?
成绩:。

实验一三相鼠笼式异步电动机点动、自锁控制和正反转控制1. 通过对三相鼠笼式异步电动机点动控制和自锁控制路线的实际安装接线,掌握由电气原理图变换成安装接线图的知识。
2. 通过对三相鼠笼式异步电动机正反转控制路线的安装接线,掌握由电气原理图接成实际操作电路的方法。
3. 加深对电气控制系统各种保护、点动控制、自锁、互锁等环节的理解。
4. 学会分析、排除继电--接触控制路线故障的方法。
1. 继电─接触控制在各类生产机械中获得广泛地应用,但凡需要进行先后、上下、摆布、进退等运动的生产机械,均采用传统的典型的正、反转继电─接触控制。
交流电动机继电─接触控制电路的主要设备是交流接触器,其主要构造为:(1) 电磁系统─铁心、吸引线圈和短路环。
(2) 触头系统─主触头和辅助触头,还可按吸引线圈得电先后触头的动作状态,分动合〔常开〕、动断〔常闭〕两类。
(3) 消弧系统─在切断大电流的触头上装有灭弧罩,以迅速切断电弧。
(4) 接线端子,反作用弹簧等。
2. 在控制回路中常采用接触器的辅助触头来实现自锁和互锁控制。
〔1〕自锁。
要求接触器线圈得电后能自动保持动作后的状态,这就是自锁,通常用接触器自身的动合触头与起动按钮相并联来实现,以到达电动机的长期运行,这一动合触头称为“自锁触头〞。
〔2〕互锁。
使两个电器不能同时得电动作的控制,称为互锁控制,如为了防止正、反转两个接触器同时得电而造成三相电源短路事故,必须增设互锁控制环节。
为操作的方便,也为防止因接触器主触头长期大电流的烧蚀而偶发触头粘连后造成的三相电源短路事故,通常在具有正、反转控制的路线中采用既有接触器的动断辅助触头的电气互锁,又有复合按钮机械互锁的双重互锁的控制环节。
电气互锁○1为了防止接触器KM1 〔正转〕、 KM2 〔反转〕同时得电吸合造成三相电源短路,在KM1〔KM2〕线圈支路中串接有KM1〔KM2〕动断触头,它们保证了路线工作时KM1、KM2不会同时得电〔如图30-1〕,以到达电气互锁目的。


实验八 三相鼠笼式异步电动机及正、反转控制一、实验目的1.了解三相鼠笼式异步电动机的结构及铭牌数据的含义。
2. 了解交流接触器、热继电器、按钮等元件的结构、动作原理及其使用方法。
3.学习异步电动机正、反转控制线路的接线和调试。
4. 学会使用兆欧表、转速表、钳形电流表。
二、实验原理简述三相鼠笼式电动机主要由定子和转子两部分组成。
定子绕组是三相对称绕组,有六个出线端1D 、2D 、3D 、4D 、5D 、6D 分别接在机座线盒上。
其中D 1、D 4为一相定子绕组的首端和末端,D 2、D 5为另一相定子绕组的首末端,又D 3、D 6为一相定子绕组的首末端,如图1-8-2所示。
根据电动机的铭牌数据和三相电源电压确定连接成星形(Y 形)还是接成三角形(Δ形)。
具体接法如图l-8-1所示。
电动机转子绕组如同一个圆柱型的笼子,在小容量电动机中,转子绕组以及作冷却用的风扇叶通常用铝铸成一体,以简化制造工艺。
(a) Y 接法 (b ) △接法1-8-1 三相鼠笼式电动机的接法三相鼠笼式异步电动机的主要额定值都标注在电动机的铭牌上。
为了电动机能安全可靠地运行,除了保证电动机正常工作所需的一切外部条件外,电动机内部绕组间和绕组与机壳间还必须有良好的绝缘。
因此,使用电动机之前和使用期间都应作绝缘电阻的检测。
测试电动机绝缘电阻的接线图如图l-8-2所示。
通常对额定电压500V 以下的电动机采用500V 兆欧表进行测试。
三相380V 电动机的各种绝缘电阻都必须大于0.5兆欧方可使用。
三相鼠笼式电动机的起动方法分直接起动和降压起动两种。
直接起动的电流大,适用于小容量电动机。
降压起动能减小起动电流,但起动转矩相应减小,适用于容量较大及起动转矩要求不大的场合。
图1-8-2电动机绝缘电阻的测量以继电器、接触器为主体的继电接触控制电路是目前仍广泛应用的电动机控制电路。
异步电动机的正、反转控制电路在不少生产机械中得到了广泛的应用。
交流接触器是一种受电磁作用而动作的电器,其主触头容量大,用于电动机主电路以实现三相电压的加入。

电工部分三相鼠笼式异步电动机正反转控制一、课程设计的目的及要求根据已有的电路图连接电路,在实验台上连接电路,最终实现让电动机转起来的要求:1掌握三相鼠笼式异步电动机正反转控制电路的工作原理、接线及操作方法。
2掌握继电器控制系统中“互锁”、“自锁”的概念及线路结构。
3学会分析、排除继电器劫持控制线路故障的方法。
4要求电动机可以正反转,由电动机原理可知,若将接至电动机的三相电源进线中的任意两根相对调,即可使电动机正反转。
二、设计原理⑴电动机的旋转方向三相异步电动机的旋转方向是取决于磁场的旋转方向,而磁场的旋转方向又取决于电源的相序,所以电源的相序决定了电动机的旋转方向。
任意改变电源的相序时,电动机的旋转方向也会随之改变。
⑵电动机正反转控制原理①控制线路三相异步电动机接触器联锁的正反转控制的电气原理图如下图所示。
线路中采用了两个接触器,即正转用的接触器KM1和反转用的接触器KM2,它们分别由正转按钮SB1和反转按钮SB2控制。
这两个接触器的主触头所接通的电源相序不同,KM1与KM2之间其中对调了两相的相序。
控制电路有两条,一条由按钮SB1和KM1线圈等组成的正转控制电路;另一条由按钮SB2和KM2线圈等组成的反转控制电路。
②互锁原理接触器KM1和KM2的主触头决不允许同时闭合,否则造成两相电源短路事故。
为了保证一个接触器得电动作时,另一个接触器不能得电动作,以避免电源的相间短路,就在正转控制电路中串接了反转接触器KM2的常闭辅助触头,而在反转控制电路中串接了正转接触器KM1的常闭辅助触头。
当接触器KM1得电动作时,串在反转控制电路中的KM1的常闭触头分断,切断了反转控制电路,保证了KM1主触头闭合时,KM2的主触头不能闭合。
同样,当接触器KM2得电动作时, KM2的常闭触头分断,切断了正转控制电路,可靠地避免了两相电源短路事故的发生。
这种在一个接触器得电动作时,通过其常闭辅助触头使另一个接触器不能得电动作的作用叫联锁(或互锁)。
三相笼型异步电机地正反转控制电路说课稿一.教案内容1.三相异步电机地正反转控制电路地工作过程、自锁、互锁地概念2.必须熟练掌握异步电机正反转控制电路地工作过程. 二、教案目标能力目标: 1. 熟悉由原理图到实际接线地方法, 提高实际接线、操作地能力2. 学会查找、检查、判断故障地方法知识目标: 1. 了解电动机地正反转控制电路2. 掌握控制电路地工作原理及运行情况.3.掌握电路中地自锁、互锁正、反转控制线路接线特点三、教案设计教案步骤:1. 让学生先预习课本, 让学生先对电路地自锁、互锁、双重联锁地涵义以及电路地通电情况有所了解①、先分析电机正反转地主电路, 分清楚每个线圈地作用再让学生通过电路图形分析线圈地得电和失电情况.②、让学生在电路图中能够根据按钮地动作情况尽可能地指出线圈地动作情况.2.源地相序,即交换三相电源尽显中地任意两根相线,就能改变电动机地转向,故可用两个接触器地主触点来对调电动机定子绕组电源地任意两根接线,就可实现电动机地正、反转.b5E2RGbCAP该图中,当接触器KM1工作时,KM1地三对主触点把三相电源和电动机地定子绕组按顺相序L1、L2、L3连接,电动机正转•当接触器KM2工作时,则KM2地三对主触点把三相电源和电动机地定子绕组按反相序L3、L2、L1连接,电动机反转.plEanqFDPw主电路特色:学生能按照电工工艺所学地知识进行配线并学会在配线前根据要求选择出合适地导线学生在做地时候,也能体现按着在电气箱内配线时,要求横平 竖直,在导线地两端统一编号,而且编号必须与原理图一致地要求 来完成 DXDiTa9E3d任务一:在下图中,按下SB2按钮,观察下各触头地动作情能根据规划地控制电路图进行安装与接线,并进行调试. 能对电路中地故障进行分析和排除.任务•合上电源QS,按下SB2按钮,观察并记录在下表中分组讨论:根据线圈地得电情况分析与线圈对应地常开触点和常闭触点地动作情况,是否具有KM1线圈得电后其常开触点闭合 常闭触点断开地情况• RTCrpUDGiT总自锁:是指当线圈通入电流之后,其相对应地常开触点闭合, 使得线路连续通电,电机持续运行地情况.工作过程:当SB2闭合时,线路中地KM 线圈得电,其对应地常开KM 触况并作记录•控制电路图特色:点同时也闭合<主电路中地交流接触器地闭合使得主电路被接通,控制电路中地常开触电使得控制线路中地线圈处于一直得电状态),常闭触点断开,此时,电机处于正向转动,当按下停止按钮SB1后线路被切断,它地主电路中地常开地接触器就断开,电机停止运行.5PCzVD7HxA特色:让学生具有仔细观察,并作出正确判断地能力•任务二按下SB3按钮,观察线圈及各触点地动作情况,并作记录!若KM2线圈地常闭触点出现故障<常闭触点一直闭合)时,按下SB2按钮地动作情况,作出记录! jLBHrnAlLg讨论:根据表格中所填写地内容,试分析当出故障时按钮SB2闭合地时候KM2线圈是如何失电地,其所对应地常开常闭触点在电路中起到什么作用?KM2地常开,常闭触点在电路中又起到何作用?XHAQX74J0X总结:联锁,是指在同一时间里,只允许其中一个接触器工作地相互制约地关系•电气互锁,靠接触器触点来实现地互锁•工作过程:在按下SB3按钮后,其常闭触点使得KM1线圈线路断开<电机正转结束),KM1地常闭触点闭合,KM2线圈得电,得电后它地常开触点闭合,使线圈处于自锁状态,电机进入反转状态•当出现故障时,虽然KM2常闭触点坏掉,但是线路中用地是双重互锁,按下按钮地时候,按钮地常闭触点使得KM2线圈失电,KM2地常闭触点接通KM1线路,此时按下SB2按钮,电机自动进入到正转运行状态•实现了电机自动正一反一正状态间地自动运行丄DAYtRyKfE 特色:这操作能体现学生观察与排除故障地能力•总体特色与创新:使学生地动手能力和表达能力得到提高,可以为中级电工考核打下基础.。
相鼠笼式异步电动机正反转控制IMB standardization office【IMB 5AB- IMBK 08- IMB 2C】电工部分三相鼠笼式异步电动机正反转控制一、课程设计的目的及要求根据已有的电路图连接电路,在实验台上连接电路,最终实现让电动机转起来的要求:1掌握三相鼠笼式异步电动机正反转控制电路的工作原理、接线及操作方法。
2掌握继电器控制系统中“互锁”、“自锁”的概念及线路结构。
3学会分析、排除继电器劫持控制线路故障的方法。
4要求电动机可以正反转,由电动机原理可知,若将接至电动机的三相电源进线中的任意两根相对调,即可使电动机正反转。
二、设计原理⑴电动机的旋转方向三相异步电动机的旋转方向是取决于磁场的旋转方向,而磁场的旋转方向又取决于电源的相序,所以电源的相序决定了电动机的旋转方向。
任意改变电源的相序时,电动机的旋转方向也会随之改变。
⑵电动机正反转控制原理①控制线路三相异步电动机接触器联锁的正反转控制的电气原理图如下图所示。
线路中采用了两个接触器,即正转用的接触器KM1和反转用的接触器KM2,它们分别由正转按钮SB1和反转按钮SB2控制。
这两个接触器的主触头所接通的电源相序不同,KM1与KM2之间其中对调了两相的相序。
控制电路有两条,一条由按钮SB1和KM1线圈等组成的正转控制电路;另一条由按钮SB2和KM2线圈等组成的反转控制电路。
②互锁原理接触器KM1和KM2的主触头决不允许同时闭合,否则造成两相电源短路事故。
为了保证一个接触器得电动作时,另一个接触器不能得电动作,以避免电源的相间短路,就在正转控制电路中串接了反转接触器KM2的常闭辅助触头,而在反转控制电路中串接了正转接触器KM1的常闭辅助触头。
当接触器KM1得电动作时,串在反转控制电路中的KM1的常闭触头分断,切断了反转控制电路,保证了KM1主触头闭合时,KM2的主触头不能闭合。
同样,当接触器KM2得电动作时, KM2的常闭触头分断,切断了正转控制电路,可靠地避免了两相电源短路事故的发生。
三相鼠笼式异步电动机正反转及能耗制动电气控制系统
班级学号:2010084030001 姓名:陈国强
2010084030002 郭兴
2010084030003 谌鸿强
一、系统设计方案
异步电机主要用作电动机,拖动各种生产机械。
异步电动机的优点是结果简单、容易制造、价格低廉、运行可靠、坚固耐用、运行效率较高且适用性强,缺点是功率因数较差。
三相异步电动机启动过程中会出现较大的电流,对电动机本身会有一定的影响。
由于异步电动机不存在换向问题,对不频繁启动的异步电动机来说,短时大电流没什么关系;对频繁启动的异步电动机,频繁出现短时大电流会使电动机内部过热,但是,只要限制每小时最高启动次数,电动机还是能承受的。
因此,只考虑电动机本身,是可以直接启动的。
但下面两种情况下,三相异步电动机直接启动是不可行的:①变压器与电动机容量之比不足够大;②启动转矩不能满足要求。
对于第①种情况,需要减小启动电流,第②种情况需要加大启动转矩。
本设计中不属于以上两种情况且不存在频繁启动的问题,故采用直接启动。
对于鼠笼异步电动机的控制方式有多种,常见的有PLC控制盒传统继电器控制,这里采用PLC控制方式。
主要设计步骤如下:
1、主电路设计
2、电路参数估算
3、根据参数选择元器件
4、PLC控制电路设计
5、PLC控制编程软件
6、调试运行
二、电动机主电路设计
根据要求,主电路设计如图1。
初始时,机械手停靠在左边,SQ1为ON,当QF闭合时,按下启动开关SB1,则继电器KM1得电,电机正转,机械手向右运动至工位1,触发行程开关SQ2使之转为ON状态,则继电器KM3得电,电机停转,并在该位置停靠6秒,然后再继续前进至工位2,触发行程开关SQ3使之转为ON状态,同样继电器KM3得电,电机停转,并在该位置停靠6秒,然后电机反转,退回至初始位置。
主电路中H1,H2分别为左右极限报警灯,若机械手运动到极限左右位置时,触发极限位置开关,则KM3,KM4,KM5得电,电机停转,并且报警器得电报警。
,
图1主电路设计图
三、相关元器件选择 参数计算: 1、能耗制动电路
通入的直流为I =,根据经验能耗制动对鼠笼式异步电动机通常制动电流取
I ==(1~2)N I ,则I =可取8A,制动时,直流电压d U =I =L R ,L R 为两相串联定
子绕组冷态电阻。
变压器二次侧电压为2U ,得出关系式0.92U =I =(L R +R),R 为串入的电阻值,变压器取380v-36v ,2U =36V ,有以上式子求出R=
2
L 0.9U R I =
-,L R 约为3.6欧,算出R=0.45欧,选择阻值为0.5的即可。
2、电动机电流:Y 形接法,线电流I=N I =6.8A 3、报警系统电流P 3.6W I 0.016A U 220V
=== 4、接触器的选用
(1) 接触器KM1、KM2的选择:电动机的负载属于一般任务,N I =6.8A ,所
以KM1,KM2选用电流大于6.8A 的一般继电器。
(2)接触器KM3的选择:根据通入的直流电流以及电压、通电时间常数等主要技术参数,流过KM3的电流约为8A,所以选用稍大于8A的即可。
(3)KM4、KM5的选择:KM4,KM5是由灯泡的选择决定选用,计算得流过的电流小于1A。
5、热继电器FR的选择:
根据电动机实际负载选取热继电器的整定电流值为电动机额定电流的
0.95~1.05倍。
这里选用LR2-D13系列
6、熔断器选择:
对于笼形异步电动机,其熔断器熔体电流是电动机额定电流的1.5~2.5倍。
熔断器的额定电流按大于或等于熔体额定电流来选择。
四、PLC硬件电路设计
PLC硬件电路图设计如下:
图2 PLC硬件电路图
可编程控制器选用西门子的S7-200 CPU224CN 6ES7 214-1BD23-0XB8,该控制器具有14个输入点和10个输出点。
输入回路接启动按钮SB1,停止按钮SB2,热继电器FR和行程开关
SQ1~SQ5,输出回路接继电器KM1~KM5。
PLC梯形图设计如下:
图3 梯形图程序设计
五、参考文献
[1]常晓玲. 电气控制系统与可编程控制器. 北京: 机械工业出版社, 2004
[2]李发海, 王岩. 电机与拖动基础北京: 清华大学出版社,2005(3)。