三相鼠笼式异步电动机正反转控制教材课程
- 格式:ppt
- 大小:209.50 KB
- 文档页数:11
实验八 三相鼠笼式异步电动机及正、反转控制一、实验目的1.了解三相鼠笼式异步电动机的结构及铭牌数据的含义。
2. 了解交流接触器、热继电器、按钮等元件的结构、动作原理及其使用方法。
3.学习异步电动机正、反转控制线路的接线和调试。
4. 学会使用兆欧表、转速表、钳形电流表。
二、实验原理简述三相鼠笼式电动机主要由定子和转子两部分组成。
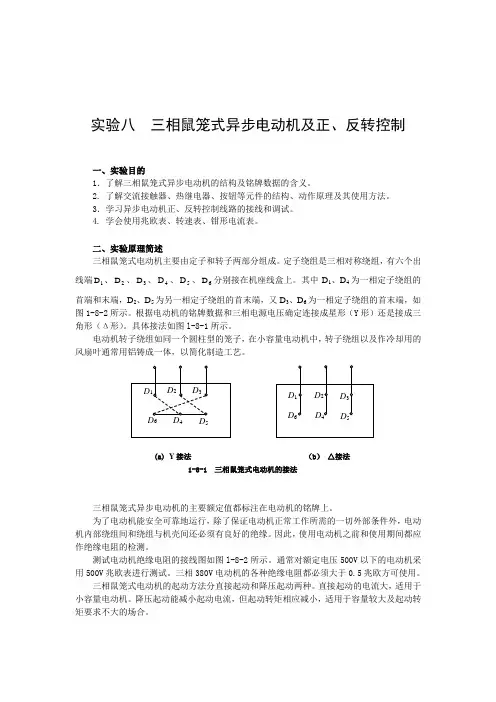
定子绕组是三相对称绕组,有六个出线端1D 、2D 、3D 、4D 、5D 、6D 分别接在机座线盒上。
其中D 1、D 4为一相定子绕组的首端和末端,D 2、D 5为另一相定子绕组的首末端,又D 3、D 6为一相定子绕组的首末端,如图1-8-2所示。
根据电动机的铭牌数据和三相电源电压确定连接成星形(Y 形)还是接成三角形(Δ形)。
具体接法如图l-8-1所示。
电动机转子绕组如同一个圆柱型的笼子,在小容量电动机中,转子绕组以及作冷却用的风扇叶通常用铝铸成一体,以简化制造工艺。
(a) Y 接法 (b ) △接法1-8-1 三相鼠笼式电动机的接法三相鼠笼式异步电动机的主要额定值都标注在电动机的铭牌上。
为了电动机能安全可靠地运行,除了保证电动机正常工作所需的一切外部条件外,电动机内部绕组间和绕组与机壳间还必须有良好的绝缘。
因此,使用电动机之前和使用期间都应作绝缘电阻的检测。
测试电动机绝缘电阻的接线图如图l-8-2所示。
通常对额定电压500V 以下的电动机采用500V 兆欧表进行测试。
三相380V 电动机的各种绝缘电阻都必须大于0.5兆欧方可使用。
三相鼠笼式电动机的起动方法分直接起动和降压起动两种。
直接起动的电流大,适用于小容量电动机。
降压起动能减小起动电流,但起动转矩相应减小,适用于容量较大及起动转矩要求不大的场合。
图1-8-2电动机绝缘电阻的测量以继电器、接触器为主体的继电接触控制电路是目前仍广泛应用的电动机控制电路。
异步电动机的正、反转控制电路在不少生产机械中得到了广泛的应用。
交流接触器是一种受电磁作用而动作的电器,其主触头容量大,用于电动机主电路以实现三相电压的加入。
电工部分三相鼠笼式异步电动机正反转控制一、课程设计的目的及要求根据已有的电路图连接电路,在实验台上连接电路,最终实现让电动机转起来的要求:1掌握三相鼠笼式异步电动机正反转控制电路的工作原理、接线及操作方法。
2掌握继电器控制系统中“互锁”、“自锁”的概念及线路结构。
3学会分析、排除继电器劫持控制线路故障的方法。
4要求电动机可以正反转,由电动机原理可知,若将接至电动机的三相电源进线中的任意两根相对调,即可使电动机正反转。
二、设计原理⑴电动机的旋转方向三相异步电动机的旋转方向是取决于磁场的旋转方向,而磁场的旋转方向又取决于电源的相序,所以电源的相序决定了电动机的旋转方向。
任意改变电源的相序时,电动机的旋转方向也会随之改变。
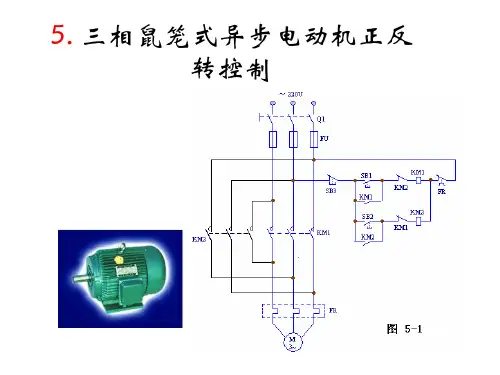
⑵电动机正反转控制原理①控制线路三相异步电动机接触器联锁的正反转控制的电气原理图如下图所示。
线路中采用了两个接触器,即正转用的接触器KM1和反转用的接触器KM2,它们分别由正转按钮SB1和反转按钮SB2控制。
这两个接触器的主触头所接通的电源相序不同,KM1与KM2之间其中对调了两相的相序。
控制电路有两条,一条由按钮SB1和KM1线圈等组成的正转控制电路;另一条由按钮SB2和KM2线圈等组成的反转控制电路。
②互锁原理接触器KM1和KM2的主触头决不允许同时闭合,否则造成两相电源短路事故。
为了保证一个接触器得电动作时,另一个接触器不能得电动作,以避免电源的相间短路,就在正转控制电路中串接了反转接触器KM2的常闭辅助触头,而在反转控制电路中串接了正转接触器KM1的常闭辅助触头。
当接触器KM1得电动作时,串在反转控制电路中的KM1的常闭触头分断,切断了反转控制电路,保证了KM1主触头闭合时,KM2的主触头不能闭合。
同样,当接触器KM2得电动作时, KM2的常闭触头分断,切断了正转控制电路,可靠地避免了两相电源短路事故的发生。
这种在一个接触器得电动作时,通过其常闭辅助触头使另一个接触器不能得电动作的作用叫联锁(或互锁)。
三相笼型异步电机地正反转控制电路说课稿一.教案内容1.三相异步电机地正反转控制电路地工作过程、自锁、互锁地概念2.必须熟练掌握异步电机正反转控制电路地工作过程. 二、教案目标能力目标: 1. 熟悉由原理图到实际接线地方法, 提高实际接线、操作地能力2. 学会查找、检查、判断故障地方法知识目标: 1. 了解电动机地正反转控制电路2. 掌握控制电路地工作原理及运行情况.3.掌握电路中地自锁、互锁正、反转控制线路接线特点三、教案设计教案步骤:1. 让学生先预习课本, 让学生先对电路地自锁、互锁、双重联锁地涵义以及电路地通电情况有所了解①、先分析电机正反转地主电路, 分清楚每个线圈地作用再让学生通过电路图形分析线圈地得电和失电情况.②、让学生在电路图中能够根据按钮地动作情况尽可能地指出线圈地动作情况.2.源地相序,即交换三相电源尽显中地任意两根相线,就能改变电动机地转向,故可用两个接触器地主触点来对调电动机定子绕组电源地任意两根接线,就可实现电动机地正、反转.b5E2RGbCAP该图中,当接触器KM1工作时,KM1地三对主触点把三相电源和电动机地定子绕组按顺相序L1、L2、L3连接,电动机正转•当接触器KM2工作时,则KM2地三对主触点把三相电源和电动机地定子绕组按反相序L3、L2、L1连接,电动机反转.plEanqFDPw主电路特色:学生能按照电工工艺所学地知识进行配线并学会在配线前根据要求选择出合适地导线学生在做地时候,也能体现按着在电气箱内配线时,要求横平 竖直,在导线地两端统一编号,而且编号必须与原理图一致地要求 来完成 DXDiTa9E3d任务一:在下图中,按下SB2按钮,观察下各触头地动作情能根据规划地控制电路图进行安装与接线,并进行调试. 能对电路中地故障进行分析和排除.任务•合上电源QS,按下SB2按钮,观察并记录在下表中分组讨论:根据线圈地得电情况分析与线圈对应地常开触点和常闭触点地动作情况,是否具有KM1线圈得电后其常开触点闭合 常闭触点断开地情况• RTCrpUDGiT总自锁:是指当线圈通入电流之后,其相对应地常开触点闭合, 使得线路连续通电,电机持续运行地情况.工作过程:当SB2闭合时,线路中地KM 线圈得电,其对应地常开KM 触况并作记录•控制电路图特色:点同时也闭合<主电路中地交流接触器地闭合使得主电路被接通,控制电路中地常开触电使得控制线路中地线圈处于一直得电状态),常闭触点断开,此时,电机处于正向转动,当按下停止按钮SB1后线路被切断,它地主电路中地常开地接触器就断开,电机停止运行.5PCzVD7HxA特色:让学生具有仔细观察,并作出正确判断地能力•任务二按下SB3按钮,观察线圈及各触点地动作情况,并作记录!若KM2线圈地常闭触点出现故障<常闭触点一直闭合)时,按下SB2按钮地动作情况,作出记录! jLBHrnAlLg讨论:根据表格中所填写地内容,试分析当出故障时按钮SB2闭合地时候KM2线圈是如何失电地,其所对应地常开常闭触点在电路中起到什么作用?KM2地常开,常闭触点在电路中又起到何作用?XHAQX74J0X总结:联锁,是指在同一时间里,只允许其中一个接触器工作地相互制约地关系•电气互锁,靠接触器触点来实现地互锁•工作过程:在按下SB3按钮后,其常闭触点使得KM1线圈线路断开<电机正转结束),KM1地常闭触点闭合,KM2线圈得电,得电后它地常开触点闭合,使线圈处于自锁状态,电机进入反转状态•当出现故障时,虽然KM2常闭触点坏掉,但是线路中用地是双重互锁,按下按钮地时候,按钮地常闭触点使得KM2线圈失电,KM2地常闭触点接通KM1线路,此时按下SB2按钮,电机自动进入到正转运行状态•实现了电机自动正一反一正状态间地自动运行丄DAYtRyKfE 特色:这操作能体现学生观察与排除故障地能力•总体特色与创新:使学生地动手能力和表达能力得到提高,可以为中级电工考核打下基础.。
三相鼠笼式异步电动机正反转及能耗制动电气控制系统电机拖动课程设计电拖及综合课程设计题目:专业:班级:三相鼠笼式异步电动机正反转及能耗制动电气控制系统电气工程及其自动化电气一班第 1 页共 1 页电机拖动课程设计三相鼠笼式异步电动机正反转及能耗制动电气控制系统[摘要] 本课题主要是关于用西门子的PLC控制机械手来完成一系列预定动作,其中机械手由三相鼠笼式异步电动机来控制,系统的外部信息由五个行程开关及按钮提供,电动机的制动方式为能耗制动。
本设计主要完成如下任务:1.完成三相鼠笼式异步电动机正反转及能耗制动系统主电路设计;2.完成PLC控制系统硬件电路设计;3.设计中用到的所有元器件的选型。
1.系统设计方案:本实验用 Y100L2-4型三相鼠笼式异步电动机驱动机械手来完成如下动作:机械手初始位置时停在左边,位置传感器SQ1 为ON。
当按下起动按钮SB1 后,机械手开始工作,前进到工位1 时工作6s,前进到工位2 时工作6s,然后返回到初始位置。
当按下停止按钮SB2 后,机械手停止工作。
当机械手运动到左(右)极限位置时,报警指示并使机械手停止运动。
机械手的正反转以及停车等由三相鼠笼异步电动机及可编程控制器实现。
左极限位右极限位前进返回位置传感器位置传感器SQ1SQ4暂停6s工位1前进暂停6s 工位2位置传感器SQ2起动按钮SB1停止按钮SB2位置传感器SQ3位置传感器SQ5左极限报警指示右极限报警指示图1:(机械手运动工作示意图)第 2 页共 2 页电机拖动课程设计2.电动机主电路设计:电动机的运动状态分为正转,反转,停止三种,制动形式为能耗制动。
电机选用.Y100L2-4型三相鼠笼式异步电动机.PLC可编程控制器图中QS,FU1,FU2,FR分别为空气开关,熔断器,用于电机的过载,缺相保护等。
电机的正反转互换由改变输入电路的相序来实现。
正转是KM1闭合, KM2断开,反转时KM1断开,KM2闭合,输入电路的相序就由L1-L2-L3变为L3-L2-L1,实现电路的反转。
电工部分欧阳歌谷(2021.02.01)三相鼠笼式异步电动机正反转控制一、课程设计的目的及要求根据已有的电路图连接电路,在实验台上连接电路,最终实现让电动机转起来的要求:1掌握三相鼠笼式异步电动机正反转控制电路的工作原理、接线及操作方法。
2掌握继电器控制系统中“互锁”、“自锁”的概念及线路结构。
3学会分析、排除继电器劫持控制线路故障的方法。
4要求电动机可以正反转,由电动机原理可知,若将接至电动机的三相电源进线中的任意两根相对调,即可使电动机正反转。
二、设计原理⑴电动机的旋转方向三相异步电动机的旋转方向是取决于磁场的旋转方向,而磁场的旋转方向又取决于电源的相序,所以电源的相序决定了电动机的旋转方向。
任意改变电源的相序时,电动机的旋转方向也会随之改变。
⑵电动机正反转控制原理①控制线路三相异步电动机接触器联锁的正反转控制的电气原理图如下图所示。
线路中采用了两个接触器,即正转用的接触器KM1和反转用的接触器KM2,它们分别由正转按钮SB1和反转按钮SB2控制。
这两个接触器的主触头所接通的电源相序不同,KM1与KM2之间其中对调了两相的相序。
控制电路有两条,一条由按钮SB1和KM1线圈等组成的正转控制电路;另一条由按钮SB2和KM2线圈等组成的反转控制电路。
②互锁原理接触器KM1和KM2的主触头决不允许同时闭合,否则造成两相电源短路事故。
为了保证一个接触器得电动作时,另一个接触器不能得电动作,以避免电源的相间短路,就在正转控制电路中串接了反转接触器KM2的常闭辅助触头,而在反转控制电路中串接了正转接触器KM1的常闭辅助触头。
当接触器KM1得电动作时,串在反转控制电路中的KM1的常闭触头分断,切断了反转控制电路,保证了KM1主触头闭合时,KM2的主触头不能闭合。
同样,当接触器KM2得电动作时,KM2的常闭触头分断,切断了正转控制电路,可靠地避免了两相电源短路事故的发生。
这种在一个接触器得电动作时,通过其常闭辅助触头使另一个接触器不能得电动作的作用叫联锁(或互锁)。