四相六线
- 格式:doc
- 大小:177.00 KB
- 文档页数:13
计算机控制技术课程实验之二步进电机控制实验内容1.掌握KeilC51软件与Protues软件联合仿真调试的方法;2.掌握步进电机的工作原理及控制方法;3.掌握步进电机控制的不同编程方法。
实验原理一、步进电机步进电机的工作就是步进转动,其功用是将脉冲电信号变换为相应的角位移或是直线位移,就是给一个脉冲信号,电动机转动一个角度或是前进一步。
步进电机的角位移量与脉冲数成正比,它的转速与脉冲频率(f)成正比,在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
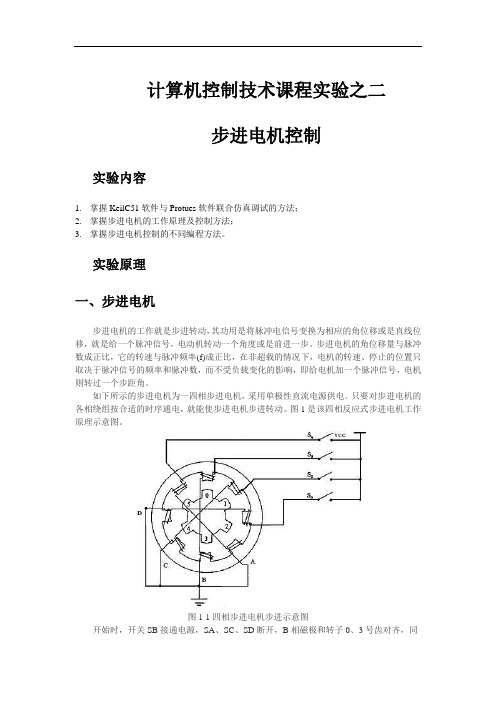
如下所示的步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1-1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D 四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图1-2所示:图1-2 步进电机工作时序波形图实验内容1.用Proteus设计一四相六线步进电视控制电路。
要求利用P1口作步进电机的控制端口,通过达林顿阵列ULN2003A驱动步进电机。
2.编写程序,实现步进电机的正反转控制。
正反转时间分别持续10S时间,如此循环。
3.设计一可调速步进电机控制电路。
P3.0~P3.2分别接案件K1~K3,其中K1为正反转控制按键,K2为加速按键,K3为减速按键,要求速度7档(1~7)可调,加减速各设3档,复位时位于4档,要求每档速度变化明显。
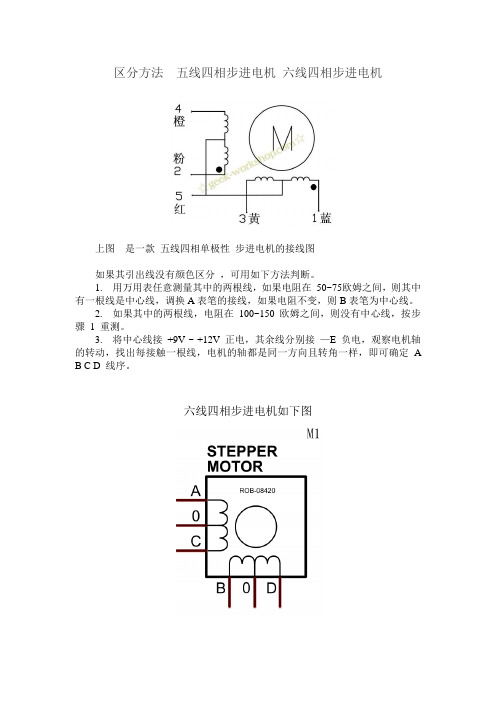
区分方法五线四相步进电机六线四相步进电机上图是一款五线四相单极性步进电机的接线图如果其引出线没有颜色区分,可用如下方法判断。
1. 用万用表任意测量其中的两根线,如果电阻在50~75欧姆之间,则其中有一根线是中心线,调换A表笔的接线,如果电阻不变,则B表笔为中心线。
2. 如果其中的两根线,电阻在100~150 欧姆之间,则没有中心线,按步骤1 重测。
3. 将中心线接+9V ~ +12V 正电,其余线分别接—E 负电,观察电机轴的转动,找出每接触一根线,电机的轴都是同一方向且转角一样,即可确定 A B C D 线序。
六线四相步进电机如下图判断方法一:1. 一般有6根线的软驱步进电机,它的绕组分为两组,每组三根线,三根线中有一条线至其它两线的电阻相等,这条为公用线。
线号为0 。
2. 将0 号线接+9V ~ +12V 电,将这一组的另外两根线分别接负电,顺时针转的这根线作记号为●,名为A. 另一组线圈照此判断,作记号为●,名B。
剩余的两根线便是对应绕组的C与D.3. 将两根0 号线接在一起,再按五线四相单极性步进电机的第二步测量方法,验证A B C D 线序。
判定方法二:1. A-0-C为一组,B-0-D为另一组,AC,BD的区分:公用线接+12V后,先随便假设其余四线之一为A,用A碰一下12V电源的负端,记住步进方向。
2. 用另一组的两条之一(B或D)碰一下12V电源的负端,如步进方向与上次步进方向相同。
则为B,相反则为D。
至此,ABCD就都确定了。
3. 把两组的公用线接在一起,接+12V。
其余四线为AC,和BD。
应用:按AB-BC-CD-AD-AB-的次序以通电即可旋转。
再推荐一个适用的集成电路:UCN5804B,附图,随后发出。
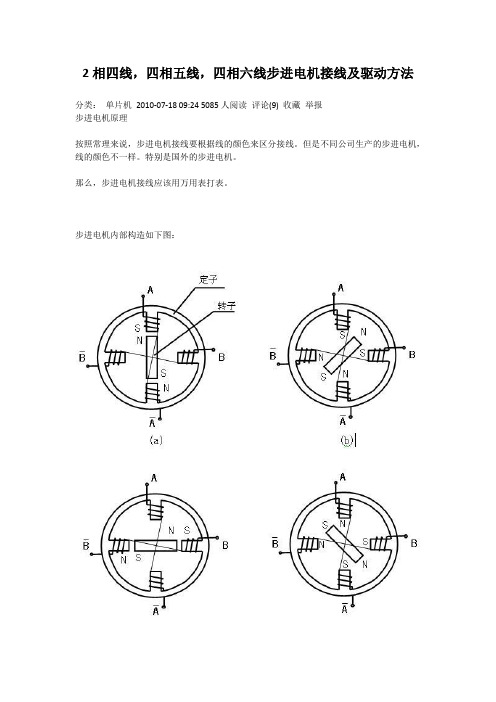
2相四线,四相五线,四相六线步进电机接线及驱动方法分类:单片机2010-07-18 09:24 5085人阅读评论(9) 收藏举报步进电机原理按照常理来说,步进电机接线要根据线的颜色来区分接线。
但是不同公司生产的步进电机,线的颜色不一样。
特别是国外的步进电机。
那么,步进电机接线应该用万用表打表。
步进电机内部构造如下图:通过上图可知,A,~A是联通的,B和~B是联通。
那么,A和~A是一组a,B和~B是一组b。
不管是两相四相,四相五线,四相六线步进电机。
内部构造都是如此。
至于究竟是四线,五线,还是六线。
就要看A和~A之间,B和B~之间有没有公共端com抽线。
如果a组和b组各自有一个com端,则该步进电机六线,如果a和b组的公共端连在一起,则是5线的。
所以,要弄清步进电机如何接线,只需把a组和b组分开。
用万用表打。
四线:由于四线没有com公共抽线,所以,a和b组是绝对绝缘的,不连通的。
所以,用万用表测,不连通的是一组。
五线:由于五线中,a和b组的公共端是连接在一起的。
用万用表测,当发现有一根线和其他几根线的电阻是相当的,那么,这根线就是公共com端。
对于驱动五线步进电机,公共com端不连接也是可以驱动步进电机的。
六线:a和b组的公共抽线com端是不连通的。
同样,用万用表测电阻,发现其中一根线和其他两根线阻止是一样的,那么这根线是com端,另2根线就属于一组。
对于驱动四相六线步进电机,两根公共com端不接先也可以驱动该步进电机的。
步进电机相关概念相数:产生不同对极N、S磁场的激磁线圈对数。
常用m表示。
拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A.步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。
θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。

东明电子电子版驱动板: 驱动板采用东芝步进电机驱动芯片TA8435,用户可通过拨码开关手工调节电机的驱动细分方式,以适应不同的工作需求。
PC 接口电路模块与高压步进电机驱动电路采用板载D C _D C 电路进行电源隔离,有效保证电脑接口的安全。
自动半流控制功能,减小电机在静止时的工作电流,防止步进电机因电流过大而影响寿命。
SK-09A 型数控钻孔机 货号:WZ242 ¥1450整机框架:8mm 标厚工业PVC 板材,经数控机床精加工组装而成。
Y 轴总成加装工业级风琴折叠防尘布,有效防止钻孔过程中金属屑溅入丝杠、光杠间隙造成的丝轴、光杠磨损。
导线:Z 轴用束线拖链固定,其余全部用束线固定,有效防止工作时导线缠绕。
丝杠:深圳前锋精密机械公司,调质、精磨T 型丝杠,直径10m m ,螺距2mm ;丝杠与步进电机用弹性联轴器连接;螺母采用双螺母无间隙工艺,保证双向移动精度。
光杠与直线轴承:丽水易达公司,调质、精磨、镀铬12m m 光杠,L M 12U U 型直线轴承。
步进电机:泰国产全新C331高精度四相六线步进电机,步进角:1.8度,工作电压/电流12V/0.42A ,力矩4.5Kg/cm 。
主轴电机:大功率高速直流电机,轴、径向无间隙。
X 、Y 调整:X Y 丝杠端头均加装45m m 铝合金旋钮,方便X 、Y 方向大范围调规格:X 轴长:321m m ,行程:200mm ,定位精度:±0.01m mY 轴长:305m m ,行程:170mm ,定位精度:±0.01m mZ 轴长:149mm ,行程:100mm,定位精度:±0.05mmX 、Y 行走速度:350mm /Min ,行走误差小于0.1mm工作电压:D C 24V /2A ,附送专用开关电源,整机尺寸:410 X 410 X 350mm成品板一制作的成品板效果图:成品板二成品板三东明电子 电路板快速制板系统 是我公司开发的极为成功的产品之一, 自问世以来,已累计销售千余套。

步进电机驱动器设计及技术改进摘要:本文分析了步进电机的应用及其驱动技术研究,给出了设计软件程序实例、硬件原理图及输出波形图,并提出了相应的改进措施。
关键词:步进电机环形分配细分步进电机结构简单而且控制方便,在机械及自动控制等领域应用较普遍,但是步进电机也存在步距角较大、低频振动等缺点,如需在精度要求较高的工程中应用,除要提高制造工艺,选取高精度高性能的步进电机外,对步进电机驱动技术的研究也是很有必要的。
1 步进电机工作原理步进电机是一种将电脉冲信号转化为角位移的执行机构,它有别于普通的旋转电机,步进电机的旋转运动和输入的脉冲个数有严格的对应关系,并以此来控制其角位移量,同时依靠步进电机特有的自锁能力使其保持在目标位置。
2 驱动器设计步进电机运动方式的特殊性决定了它需用一个专用的驱动器来供电,驱动器主要功能是对输入脉冲分配后再进行功率放大,放大后的功率信号按特定顺序轮流加到电机绕组的两端,控制步进电机运动。
驱动器主要由环形分配器、功率放大器及其他控制电路组成,其中环形分配器是步进电机驱动器设计的关键。
目前的DSP技术发展较快,特别是美国TI公司的2000系列DSP 是专为控制各种电机设计的,本文以TMS320LF2407控制两相四拍的步进电机为例,主要介绍最常用的两种设计环形分配器的方案:一是通过DSP的PWM口,在程序里对EV A或者EVB的4个PWM口进行精确的时序分配,利用纯软件的方法实现环形分配器;二是以专业的芯片电路为基础,如集成电路芯片L297+L298组成得驱动电路或者THB7128芯片等,利用DSP的I/O口即可实现对环形分配器的控制。
两种方案各有优缺点,下面详细介绍两种方案实现方法。
2.1 硬件实现环形分配器本文选取比较常用的集成电路芯片L297和L298的组合,该方案特点是控制简单,只需要对L297芯片的几个输入端进行控制即可,其中包括脉冲信号CLK、方向控制信号CW/CCW、半步和整步选择控制信号HALF/FULL 以及使能信号EN。
通过上图可知,A,~A是联通的,B和~B是联通。
那么,A和~A是一组a,B和~B是一组b。
不管是两相四相,四相五线,四相六线步进电机。
内部构造都是如此。
至于究竟是四线,五线,还是六线。
就要看A和~A之间,B和B~之间有没有公共端com抽线。
如果a组和b 组各自有一个com端,则该步进电机六线,如果a和b组的公共端连在一起,则是5线的。
所以,要弄清步进电机如何接线,只需把a组和b组分开。
用万用表打。
四线:由于四线没有com公共抽线,所以,a和b组是绝对绝缘的,不连通的。
所以,用万用表测,不连通的是一组。
五线:由于五线中,a和b组的公共端是连接在一起的。
用万用表测,当发现有一根线和其他几根线的电阻是相当的,那么,这根线就是公共com端。
对于驱动五线步进电机,公共com端不连接也是可以驱动步进电机的。
六线:a和b组的公共抽线com端是不连通的。
同样,用万用表测电阻,发现其中一根线和其他两根线阻止是一样的,那么这根线是com端,另2根线就属于一组。
对于驱动四相六线步进电机,两根公共com端不接先也可以驱动该步进电机的。
步进电机相关概念:相数:产生不同对极N、S磁场的激磁线圈对数。
常用m表示。
拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A.步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。
θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。
四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的)静转矩:电机在额定静态电作用下,电机不作旋转运动时,电机转轴的锁定力矩。
2相四线,四相五线,四相六线步进电机接线及驱动方法步进电机原理按照常理来说,步进电机接线要根据线的颜色来区分接线 的步进电机,线的颜色不一样。
特别是国外的步进电机那么,步进电机接线应该用万用表打表。
~B 是一组b o 不管是两相四相,四相五线,四相六线步进电机。
内部构造都是如此。
至于究竟是四线,五线,还是六线。
就要看 A 和~A 之间,B 和B~之间有没有公共端com 抽线。
如果a 组和b 组各自有一个com 端,则该步进电机六线,如果 a 和b 组的公 共端连在一起,则是 5 线的。
但是不同公司生产B 和~B 是联通。
那么, A 和~A 是一组a , B 和通过上图可知,A, ~A 是联通的,步进电机内部构造如下图所以,要弄清步进电机如何接线,只需把 a 组和 b 组分开。
用万用表打。
四线:由于四线没有com公共抽线,所以,a和b组是绝对绝缘的,不连通的。
所以,用万用表测,不连通的是一组。
五线:由于五线中,a和b组的公共端是连接在一起的。
用万用表测,当发现有一根线和其他几根线的电阻是相当的,那么,这根线就是公共com端。
对于驱动五线步进电机,公共com端不连接也是可以驱动步进电机的。
六线:a和b组的公共抽线com端是不连通的。
同样,用万用表测电阻,发现其中一根线和其他两根线阻止是一样的,那么这根线是com端,另2根线就属于一组。
对于驱动四相六线步进电机,两根公共com端不接先也可以驱动该步进电机的。
步进电机相关概念:相数:产生不同对极N S磁场的激磁线圈对数。
常用m表示。
拍数: 完成一个磁场周期性变化所需脉冲数或导电状态用n 表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD- DA-AB四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A.步距角:对应一个脉冲信号,电机转子转过的角位移用9表示。
B =360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。
在这里介绍一下用51单片机驱动步进电机的方法。
这款步进电机的驱动电压12V,步进角为7.5度 . 一圈360 度, 需要48 个脉冲完成该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、5:黄色、6:黑色。
采用51驱动ULN2003的方法进行驱动。
ULN2003的驱动直接用单片机系统的5V电压,可能力矩不是很大,大家可自行加大驱动电压到12V。
;******************************************************************************** *;****************************步进电机的驱动***************************************; DESIGN BY BENLADN911 FOSC = 12MHz 2005.05.19;---------------------------------------------------------------------------------; 步进电机的驱动信号必须为脉冲信号转动的速度和脉冲的频率成正比; 本步进电机步进角为7.5度 . 一圈360 度, 需要48 个脉冲完成;---------------------------------------------------------------------------------; A组线圈对应P2.4; B组线圈对应P2.5; C组线圈对应P2.6; D组线圈对应P2.7; 正转次序: AB组--BC组--CD组--DA组(即一个脉冲,正转7.5 度) ;---------------------------------------------------------------------------------- ;----------------------------正转--------------------------ORG 0000HLJMP MAINORG 0100HMAIN:MOV R3,#144 正转3 圈共144 脉冲START:MOV R0,#00HSTART1:MOV P2,#00HMOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START 对A 的判断,当A = 0 时则转到STARTMOV P2,ALCALL DELAYINC R0DJNZ R3,START1MOV P2,#00HLCALL DELAY1;-----------------------------反转------------------------MOV R3,#144 反转一圈共144 个脉冲START2:MOV P2,#00HMOV R0,#05START3:MOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START2MOV P2,ACALL DELAYINC R0DJNZ R3,START3MOV P2,#00HLCALL DELAY1LJMP MAINDELAY: MOV R7,#40 步进电机的转速M3: MOV R6,#248DJNZ R6,$DJNZ R7,M3RETDELAY1: MOV R4,#20 2S 延时子程序DEL2: MOV R3,#200DEL3: MOV R2,#250DJNZ R2,$DJNZ R3,DEL3DJNZ R4,DEL2RETTABLE:TABLE:DB 80H,0C0H,40H,50H,10H,30H,20H,0A0H;DB 80H,40H,10H ,20H ; 正转表DB 00 ;正转结束DB 0A0H,20H,30H,10H,50H,40H,0C0H,80H;反转表;DB 20H,10H,40H,80HDB 00 ;反转结束END。
毕业设计(论文)题目智能灌溉系统的研究与设计摘要本系统系统通过选择合适的传感器将对土壤中含水量以及空气湿度等重要物理量进行采集,通过信号及采集部分将其转化为数字信号,交给单片机系统进行处理,通过智能控制部分,在需要时驱动相关外设,进行自动精确定位地灌溉。
具体流程图如下:工作过程流程图关键字: 智能控制 精确定位 密封 湿度传感器 差动放大 顺序通电 液晶显示机械设计部分整体的机构形式如下所述:水由出水口接入,经过水泵增压后,经过导水软管,最后从管的另一端喷射出来。
机械臂主要由导水软管,套筒,舵机,步进电机和与电机配合的传动装置组成。
套筒下端固结有加工上锥齿的圆环,电机通过锥齿轮传动,带动套筒转动。
舵机固定在套筒上,当套筒旋转时,舵机也随套筒旋转。
导水软管穿过套筒与固定在套筒上端的舵机相固结,当舵机臂摆动时导水软管喷头处完成竖直方向的调整,以使喷出的水能够调整远近。
而套筒转动则实现了喷水方向的调整。
这样,通过水平旋转及竖直摆动,实现了喷灌的精确定位。
考虑到水对电机、齿轮传动部分的腐蚀影响,电机及其与套筒的传动部分通过密封箱密封,导线引出,连接到控制电路部分及电源部分,以实现对机械系统的电力输入及控制。
机械臂通过套筒下端深埋入土壤进行固定。
这种方案是我们经过多次调整最后确定出来的。
下图为我们用机械仿真软件pro/engineer 制作的图形(具体见附图)我们的创新体现在我们的设计过程当中。
在喷口的设计中,由于市场上所售的喷头多导水软管舵机与导水软管连接密封箱套筒利用水压将水达到某个固定位置,因此不能实现喷灌位置的可调性要求。
因此喷管管口需要重新设计。
在喷头处,我们曾试验过多个方案。
其中一个就是拟定用钢管作导水管,将水直接引到喷头,而喷头处设计成喷口可以转动的形式,通过增加一个电机并通过细杆与喷头处连实现竖直方向的转动,水平方向的转动还是靠另一个电动机带动套筒来实现(具体见附proe仿真图)。
但是这种设计有两个问题我们没能解决。
六线四相步进电机总结2009-05-10一、步进电机基本原理图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
a. 单四拍b. 双四拍 c八拍二、步进电机转动程序单四拍://顺时针AI=0;BI=1;CI=1;DI=1;delay(1000);AI=1;BI=0;CI=1;DI=1;delay(1000);AI=1;BI=1;CI=0;DI=1; delay(1000);AI=1;BI=1;CI=1;DI=0; delay(1000);//逆时针AI=1;BI=1;CI=1;DI=0; delay(1000);AI=1;BI=1;CI=0;DI=1; delay(1000);AI=1;BI=0;CI=1;DI=1; delay(1000);AI=0;BI=1;CI=1;DI=1; delay(1000);双四拍:AB-BC-CD-DA顺时针AI=0;BI=0;CI=1;DI=1; delay(1000);AI=1;BI=0;CI=0;DI=1; delay(1000);AI=1;BI=1;CI=0;DI=0; delay(1000);AI=0;BI=1;CI=1;DI=0; delay(1000);DC-CB-BA-AD逆时针AI=1;BI=1;CI=0;DI=0; delay(1000);AI=1;BI=0;CI=0;DI=1; delay(1000);AI=0;BI=0;CI=1;DI=1; delay(1000);AI=0;BI=1;CI=1;DI=0; delay(1000);八拍://顺时针AI=0;BI=1;CI=1;DI=1;delay(1000);AI=0;BI=0;CI=1;DI=1; delay(1000);AI=1;BI=0;CI=1;DI=1; delay(1000);AI=1;BI=0;CI=0;DI=1; delay(1000);AI=1;BI=1;CI=0;DI=1; delay(1000);AI=1;BI=1;CI=0;DI=0; delay(1000);AI=1;BI=1;CI=1;DI=0; delay(1000);AI=0;BI=1;CI=1;DI=0; delay(1000);//逆时针AI=1;BI=1;CI=1;DI=0; delay(1000);AI=1;BI=1;CI=0;DI=0; delay(1000);AI=1;BI=1;CI=0;DI=1; delay(1000);AI=1;BI=0;CI=0;DI=1; delay(1000);AI=1;BI=0;CI=1;DI=1; delay(1000);AI=0;BI=0;CI=1;DI=1; delay(1000);AI=0;BI=1;CI=1;DI=1; delay(1000);AI=0;BI=1;CI=1;DI=0; delay(1000);三、步进电机高精度细分四相八拍四、步进电机电路设计五、步进电机程序设计四相步进电机原理图本文先介绍该步进电机的工作原理,然后介绍了其驱动器的软、硬件设计。
1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:a. 单四拍b. 双四拍 c八拍图2.步进电机工作时序波形图2.基于AT89C2051的步进电机驱动器系统电路原理步进电机驱动器系统电路原理如图3:图3 步进电机驱动器系统电路原理图AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
使步进电机随着不同的脉冲信号分别作正转、反转、加速、减速和停止等动作。
图中L1为步进电机的一相绕组。
AT89C2051选用频率22MHz的晶振,选用较高晶振的目的是为了在方式2下尽量减小AT89C2051对上位机脉冲信号周期的影响。
图3中的RL1~RL4为绕组内阻,50Ω电阻是一外接电阻,起限流作用,也是一个改善回路时间常数的元件。
D1~D4为续流二极管,使电机绕组产生的反电动势通过续流二极管(D1~D4)而衰减掉,从而保护了功率管TIP122不受损坏。
在50Ω外接电阻上并联一个200μF电容,可以改善注入步进电机绕组的电流脉冲前沿,提高了步进电机的高频性能。
与续流二极管串联的200Ω电阻可减小回路的放电时间常数,使绕组中电流脉冲的后沿变陡,电流下降时间变小,也起到提高高频工作性能的作用。
3.软件设计该驱动器根据拨码开关KX、KY的不同组合有三种工作方式供选择:方式1为中断方式:P3.5(INT1)为步进脉冲输入端,P3.7为正反转脉冲输入端。
上位机(PC机或单片机)与驱动器仅以2条线相连。
方式2为串行通讯方式:上位机(PC机或单片机)将控制命令发送给驱动器,驱动器根据控制命令自行完成有关控制过程。
方式3为拨码开关控制方式:通过K1~K5的不同组合,直接控制步进电机。
当上电或按下复位键KR后,AT89C2051先检测拨码开关KX、KY的状态,根据KX、KY 的不同组合,进入不同的工作方式。
以下给出方式1的程序流程框图与源程序。
在程序的编制中,要特别注意步进电机在换向时的处理。
为使步进电机在换向时能平滑过渡,不至于产生错步,应在每一步中设置标志位。
其中20H单元的各位为步进电机正转标志位;21H单元各位为反转标志位。
在正转时,不仅给正转标志位赋值,也同时给反转标志位赋值;在反转时也如此。
这样,当步进电机换向时,就可以上一次的位置作为起点反向运动,避免了电机换向时产生错步。
图4 方式1程序框图方式1源程序:MOV 20H,#00H ;20H单元置初值,电机正转位置指针MOV 21H,#00H ;21H单元置初值,电机反转位置指针MOV P1,#0C0H ;P1口置初值,防止电机上电短路MOV TMOD,#60H ;T1计数器置初值,开中断MOV TL1,#0FFHMOV TH1,#0FFHSETB ET1SETB EASETB TR1SJMP $;***********计数器1中断程序************IT1P: JB P3.7,FAN ;电机正、反转指针;*************电机正转*****************JB 00H,LOOP0JB 01H,LOOP1JB 02H,LOOP2JB 03H,LOOP3JB 04H,LOOP4JB 05H,LOOP5JB 06H,LOOP6JB 07H,LOOP7LOOP0: MOV P1,#0D0H MOV 20H,#02HMOV 21H,#40HAJMP QUITLOOP1: MOV P1,#090H MOV 20H,#04HMOV 21H,#20HAJMP QUITLOOP2: MOV P1,#0B0H MOV 20H,#08HMOV 21H,#10HAJMP QUITLOOP3: MOV P1,#030H MOV 20H,#10HMOV 21H,#08HAJMP QUITLOOP4: MOV P1,#070H MOV 20H,#20HMOV 21H,#04HAJMP QUITLOOP5: MOV P1,#060H MOV 20H,#40HMOV 21H,#02HAJMP QUITLOOP6: MOV P1,#0E0HMOV 20H,#80HMOV 21H,#01HAJMP QUITLOOP7: MOV P1,#0C0HMOV ; 20H,#01HMOV 21H,#80HAJMP QUIT;***************电机反转***************** FAN: JB 08H,LOOQ0JB 09H,LOOQ1JB 0AH,LOOQ2JB 0BH,LOOQ3JB 0CH,LOOQ4JB 0DH,LOOQ5JB 0EH,LOOQ6JB 0FH,LOOQ7LOOQ0: MOV P1,#0A0HMOV 21H,#02HMOV 20H,#40HAJMP QUITLOOQ1: MOV P1,#0E0HMOV 21H,#04HMOV 20H,#20HAJMP QUITLOOQ2: MOV P1,#0C0H MOV 21H,#08HMOV 20H,#10HAJMP QUITLOOQ3: MOV P1,#0D0H MOV 21H,#10HMOV 20H,#08HAJMP QUITLOOQ4: MOV P1,#050H MOV 21H,#20HMOV 20H,#04HAJMP QUITLOOQ5: MOV P1,#070H MOV 21H,#40HMOV 20H,#02HAJMP QUITLOOQ6: MOV P1,#030H MOV 21H,#80HMOV 20H,#01HAJMP QUITLOOQ7: MOV P1,#0B0HMOV 21H,#01HMOV 20H,#80HQUIT: RETIEND4.结论该驱动器经实验验证能驱动0.5N.m的步进电机。