四相步进电机原理图
- 格式:doc
- 大小:129.50 KB
- 文档页数:2
2EDA03四相步进电机控制电路四相步进电机控制电路题目背景步进电机是一种将电脉冲转化为角位移的执行机构。
当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
设计要求基本要求:1(以四相八拍方式控制电机的正反转(步进电机工作原理见所附资料);双四拍:对ABCD四个绕组依次按以下顺序通电。
正转:AB--B--BC--C--CD--D--DA--A-AB;反转:AB--A--AD—D--DC--C--CB—B--AB2(规定步进电机运行规律为正转20s、停10s、反转20s、停10s、再正转20s,以后反复运行。
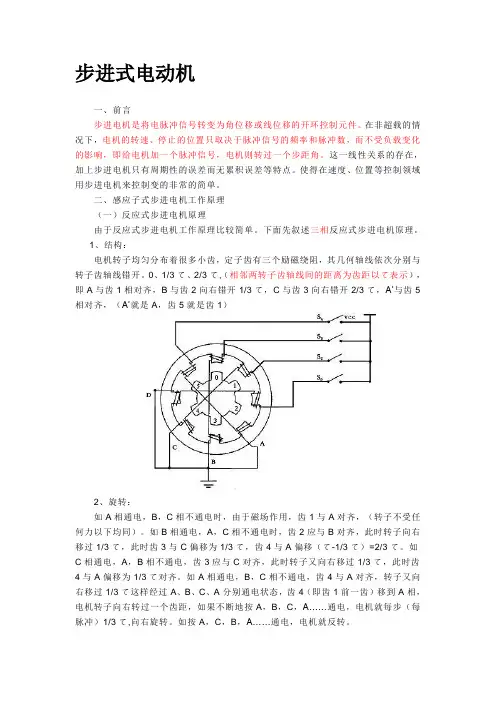
参考资料[1] 阎石.数字电子技术基础[M].北京:高等教育出版社[2] 郑存芳、李永泉、任玉艳、丁丽华、刘利晖.《EDA技术基础与实践》.自编教材[3] 潘松、黄继业.EDA技术实用教程[M].北京:科学出版社,2007.四相步进电机工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
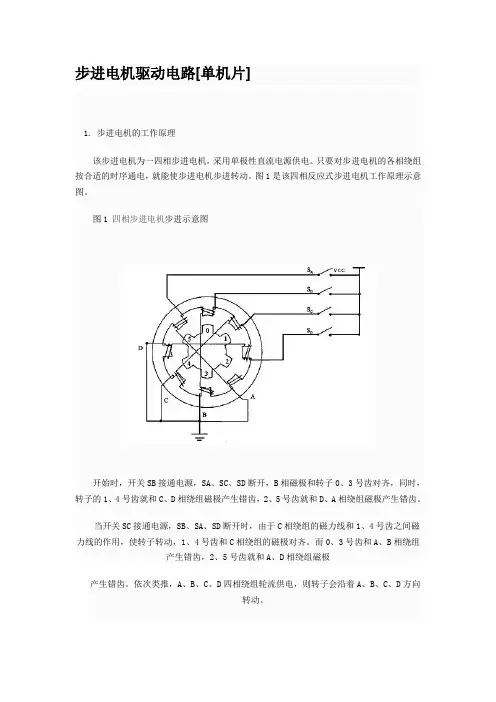
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
和C 当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
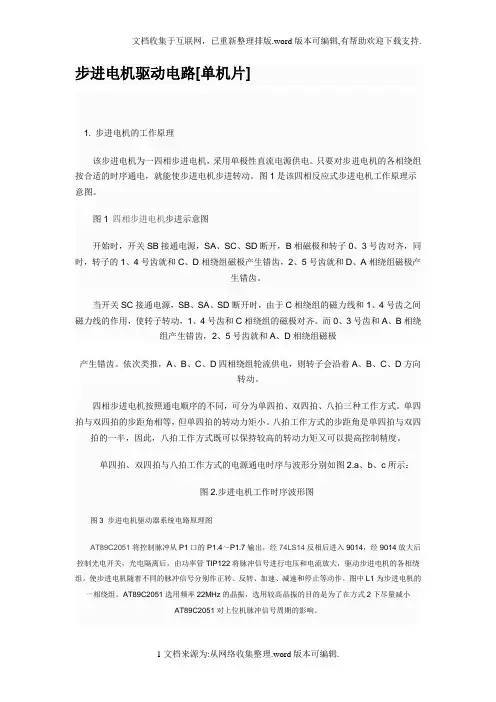
步进电机驱动电路[单机片]1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
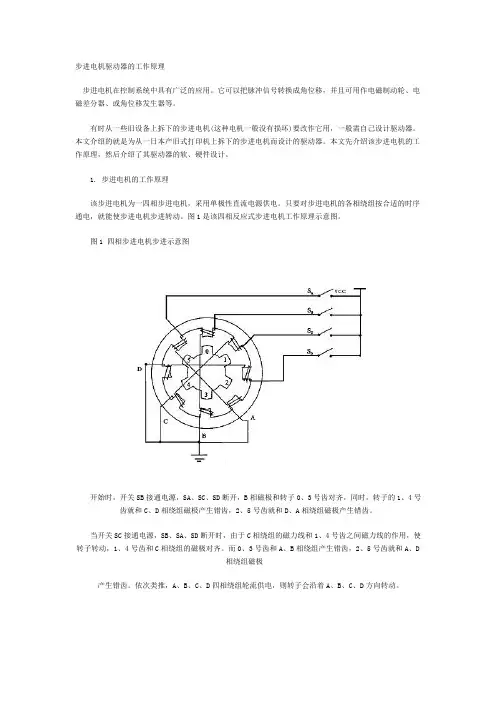
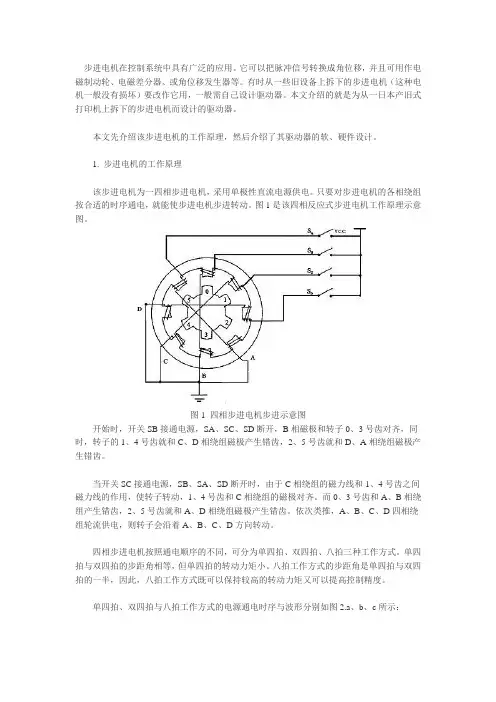
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:图2.步进电机工作时序波形图图3 步进电机驱动器系统电路原理图AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
使步进电机随着不同的脉冲信号分别作正转、反转、加速、减速和停止等动作。
图中L1为步进电机的一相绕组。
AT89C2051选用频率22MHz的晶振,选用较高晶振的目的是为了在方式2下尽量减小AT89C2051对上位机脉冲信号周期的影响。
图3中的RL1~RL4为绕组内阻,50Ω电阻是一外接电阻,起限流作用,也是一个改善回路时间常数的元件。
D1~D4为续流二极管,使电机绕组产生的反电动势通过续流二极管(D1~D4)而衰减掉,从而保护了功率管TIP122不受损坏。
步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
可以通过控制脉冲个来控制角位移量,从而达到准确定位的目的;同时也可以通过控制脉冲频率,来控制电机转动的速度和加速度,从而达到调速的目的。
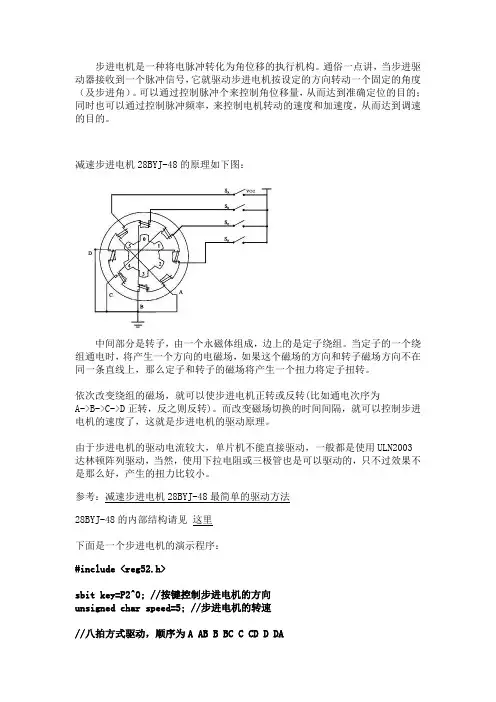
减速步进电机28BYJ-48的原理如下图:中间部分是转子,由一个永磁体组成,边上的是定子绕组。
当定子的一个绕组通电时,将产生一个方向的电磁场,如果这个磁场的方向和转子磁场方向不在同一条直线上,那么定子和转子的磁场将产生一个扭力将定子扭转。
依次改变绕组的磁场,就可以使步进电机正转或反转(比如通电次序为A->B->C->D正转,反之则反转)。
而改变磁场切换的时间间隔,就可以控制步进电机的速度了,这就是步进电机的驱动原理。
由于步进电机的驱动电流较大,单片机不能直接驱动,一般都是使用ULN2003达林顿阵列驱动,当然,使用下拉电阻或三极管也是可以驱动的,只不过效果不是那么好,产生的扭力比较小。
参考:减速步进电机28BYJ-48最简单的驱动方法28BYJ-48的内部结构请见这里下面是一个步进电机的演示程序:#include <reg52.h>sbit key=P2^0; //按键控制步进电机的方向unsigned char speed=5; //步进电机的转速//八拍方式驱动,顺序为A AB B BC C CD D DAunsigned char codeclockWise[]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x0d};void delay(unsigned char z){unsigned char x,y;for(x=0;x<z;x++)for(y=0;y<110;y++);}void main(){unsigned char i;while(1){for(i=0;i<8;i++){if(key) //按键未按下,正转{P0=clockWise[i];delay(speed);}else //按键按下,反转{P0=clockWise[8-i];delay(speed);}}}}。
步进电机驱动电路[单机片]1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:图2.步进电机工作时序波形图图3 步进电机驱动器系统电路原理图AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
使步进电机随着不同的脉冲信号分别作正转、反转、加速、减速和停止等动作。
图中L1为步进电机的一相绕组。
AT89C2051选用频率22MHz的晶振,选用较高晶振的目的是为了在方式2下尽量减小AT89C2051对上位机脉冲信号周期的影响。
图3中的RL1~RL4为绕组内阻,50Ω电阻是一外接电阻,起限流作用,也是一个改善回路时间常数的元件。
D1~D4为续流二极管,使电机绕组产生的反电动势通过续流二极管(D1~D4)而衰减掉,从而保护了功率管TIP122不受损坏。
步进电机驱动器的工作原理步进电机在控制系统中具有广泛的应用。
它可以把脉冲信号转换成角位移,并且可用作电磁制动轮、电磁差分器、或角位移发生器等。
有时从一些旧设备上拆下的步进电机(这种电机一般没有损坏)要改作它用,一般需自己设计驱动器。
本文介绍的就是为从一日本产旧式打印机上拆下的步进电机而设计的驱动器。
本文先介绍该步进电机的工作原理,然后介绍了其驱动器的软、硬件设计。
1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:图2.步进电机工作时序波形图2.基于AT89C2051的步进电机驱动器系统电路原理图3 步进电机驱动器系统电路原理图AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
步进电机在控制系统中具有广泛的应用。
它可以把脉冲信号转换成角位移,并且可用作电磁制动轮、电磁差分器、或角位移发生器等。
有时从一些旧设备上拆下的步进电机(这种电机一般没有损坏)要改作它用,一般需自己设计驱动器。
本文介绍的就是为从一日本产旧式打印机上拆下的步进电机而设计的驱动器。
本文先介绍该步进电机的工作原理,然后介绍了其驱动器的软、硬件设计。
1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:a. 单四拍b. 双四拍c八拍图2.步进电机工作时序波形图2.基于AT89C2051的步进电机驱动器系统电路原理步进电机驱动器系统电路原理如图3:图3 步进电机驱动器系统电路原理图AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
步进电机控制系统设计一、任务和目的利用PC机和实验箱设计并实现给定步进电机的控制进一步掌握微机硬件和软件综合设计方法。
二、内容和要求1.基本要求控制步进电机转动,要求转速1步/秒基于实验箱,设计并实现接口和驱动电路用汇编语言编制程序2.提高要求(1)改善步进电机的控制性能,控制步进电机转/停;正转/反转;改变转速(至少3档);单步。
(2)改善人机接口三、实验报告要求(1)实验目的和内容(2)总体设计(3)硬件设计:原理图(接线图)及简要说明(4)程序框图和清单(5)实验结果和体会附:步进电机控制波形及参考驱动电路AB BC CD DAABC 步进电机引脚: 1 2 3 4 5地 A C B DD一个周期(4拍)步进电机控制系统设计一、四相步进电机工作原理步进电机是机电一体化的关键部件之一,被广泛应用于需要精确定位、同步、行程控制等场合。
本设计所采用的是国产20BY-0型步进电机,它使用+5V直流电源,步距角为18度。
电机线圈由四相组成,即A、B、C、D四相,驱动方式为二相激磁方式,电机示意图和各线圈通电顺序如图1和表4.1所示:图 1 步进电机原理图表1相顺序 A B C D0 1 1 0 01 0 1 1 02 0 0 1 13 1 0 0 1相顺序从0到1称为一步,电机轴将转过18度,0→1→2→3→4则称为通电一周,转轴将转过72度,若循环进行这种通电一周的操作,电机便连续的转动起来,而进行相反的通电顺序如4→3→2→1将使电机同速反转。
通电一周的周期越短,即驱动频率越高,则电机转速越快,但步进电机的转速也不可能太快,因为它每走一步需要一定的时间,若信号频率过高,可能导致电机失步,甚至只在原步颤动。
二、总体设计(1)8253定时控制步进速度(2)8255输出控制脉冲,再经75452驱动电机。
(3)系统运行时,首先显示主菜单,选择子菜单(设置参数)或控制工作,或返回DOS。
三、硬件设计因采用了PC机和PC总线接口应用平台,硬件电路相对简单,除利用了PC机本身资源外(如中断资源),还利用了平台上的8253计数/定时器、8255并行接口单元,再加上外围驱动电路,便构成可步进电机控制电路,硬件原理图如图2:图2 硬件原理图图中75452元件是正与非驱动器,OC门输出,所以加上拉电阻;8253的作用是输出定时信号向CPU申请中断要求输出电机走步的控制信号。
摘要步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
步进电机的调速一般是改变输入步进电机的脉冲的频率来实现步进电机的调速,因为步进电机每给一个脉冲就转动一个固定的角度,这样就可以通过控制步进电机的一个脉冲到下一个脉冲的时间间隔来改变脉冲的频率,延时的长短来具体控制步进角来改变电机的转速,从而实现步进电机的调速。
在本设计方案中采用单片机内部的定时器改变脉冲的频率从而实现对步进电机的转速进行控制,实现电机调速与正反转的功能。
关键词:步进电机,单片机,调速系统AbstractStep-by-step electric motor is the ring opening gating element changing electricity pulse signal into angular displacement or line displacement. Under the situation of must overload, the electric motor rotation rate , discontinuous location depend on pulse signal frequency and pulse number only , make free from being loaded with the effect changing ,but be that being added a pulse signal , the electric motor by electric motor is to have rotated a step spur angle. This gleam of location Step-by-step electric motor speed regulation general be change import step-by-step electric motor pulse frequency come true step-by-step electric motor speed regulation, because of step-by-step electric motor every be given to a pulse right away rotate one fixed angle, such right away not bad pass under the control of step-by-step electric motor a pulse arrive at next pulse period come to change pulse frequency Come to control the speed regulation ,Frequency adopt the internal timer of realizing an electric motor and the function that the positive and negative rotates being in progress to step-by-step electric motor rotation rate thereby.Key Words: Step-by-step electric motor , monolithic machine , speed regulation system目录摘要------------------------------------------------------------------------------------------------------------- I ABSTRACT --------------------------------------------------------------------------------------------------- II 第1章绪论 ---------------------------------------------------------------------------------------------- 1 1.1步进电机的概述-------------------------------------------------------------------------------------- 11.1.1 步进电机的特点----------------------------------------------------------------------------- 11.1.2 步进电机的工作原理简述-------------------------------------------------------------------- 11.1.3 步进电机的基本参数-------------------------------------------------------------------------- 11.1.4 步进电机调速原理简述----------------------------------------------------------------------- 2 1.2四相八拍步进电机---------------------------------------------------------------------------------- 21.2.1四相步进电机工作原理 ----------------------------------------------------------------------- 21.2.2 八拍得工作方式 -------------------------------------------------------------------------------- 4 1.3单片机概述 -------------------------------------------------------------------------------------------- 41.3.1 单片机原理简述 -------------------------------------------------------------------------------- 41.3.2 8031单片机 ------------------------------------------------------------------------------------- 5 1.4总体方案设计 ----------------------------------------------------------------------------------------- 61.4.1 系统的组成 -------------------------------------------------------------------------------------- 61.4.2 系统的工作原理 -------------------------------------------------------------------------------- 6 第2章硬件设计----------------------------------------------------------------------------------------- 72.1A/D转换器选择-------------------------------------------------------------------------------------- 72.1.1 MC14433A/D转换器简介 ---------------------------------------------------------------------- 72.1.2 MC14433各类引脚的功能--------------------------------------------------------------------- 7 2.2外部程序存储器的扩展 --------------------------------------------------------------------------- 8 2.3片外数据存储器的扩展----------------------------------------------------------------------------- 9 2.4脉冲分配器的选择 --------------------------------------------------------------------------------- 10 2.5键盘与显示选择------------------------------------------------------------------------------------ 12 2.6六反向器的设计------------------------------------------------------------------------------------ 13 2.7逻辑电路---------------------------------------------------------------------------------------------- 142.7.1地址锁存器的设计---------------------------------------------------------------------------- 142.7.2地址译码器的选择---------------------------------------------------------------------------- 142.8报警电路设计 --------------------------------------------------------------------------------------- 15 2.9掉电保护电路设计 --------------------------------------------------------------------------------- 16 2.10光电隔离 -------------------------------------------------------------------------------------------- 17 2.11光电传感器----------------------------------------------------------------------------------------- 17 2.12步进电机的加减速控制 ------------------------------------------------------------------------- 18 第3章系统软件设计 ------------------------------------------------------------------------------ 203.1显示子程序的设计-------------------------------------------------------------------------------- 20 3.2键盘子程序的设计--------------------------------------------------------------------------------- 22 3.3正反转程序流程图--------------------------------------------------------------------------------- 253.3.1 正反转程序流程图--------------------------------------------------------------------------- 253.3.2 转速快慢程序流程图 ---------------------------------------------------------------------- 28 3.4定时中断流程图------------------------------------------------------------------------------------ 30 3.5语音报警系统-------------------------------------------------------------------------------------- 33 3.6A/D转换器中断程序------------------------------------------------------------------------------- 35 3.7主程序设计 ------------------------------------------------------------------------------------------ 37 第4章结论 ---------------------------------------------------------------------------------------------- 40 参考文献 --------------------------------------------------------------------------------------------------- 41 致谢----------------------------------------------------------------------------------------------------------- 42第1章绪论1.1 步进电机的概述1.1.1 步进电机的特点1)一般步进电机的精度为步进角的3-5%,且不累积。

四相步进电机驱动程序及工作原理1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:驱动电路:程序:大家对照一下程序就知道,本程序采用了八拍工作方式/***********************************************项目:步进电机正反转(EE01学习板演示程序)**作者:一线工人**网站:电子工程师之家*********************************************/#include <reg52.h>#define uchar unsigned char#define uint unsigned intuchar code FFW[8]={0xf1,0xf3,0xf2,0xf6,0xf4,0xfc,0xf8,0xf9}; uchar code REV[8]={0xf9,0xf8,0xfc,0xf4,0xf6,0xf2,0xf3,0xf1};/********************************************************/ /*/* 延时t毫秒/* 11.0592MHz时钟,延时约1ms/*/********************************************************/ void delay(uint t){uint k;while(t--){for(k=0; k<123; k++){ }}}/********************************************************/ /*/*步进电机正转/*/********************************************************/ void motor_ffw(uint n){uchar i;uint j;for (j=0; j<12*n; j++) //转1×n圈{for (i=0; i<8; i++) //一个周期转30度{P0 = FFW; //取数据delay(15); //调节转速}}}/********************************************************/ /*/*步进电机反转/*/********************************************************/ void motor_rev(uint n){uchar i;uint j;for (j=0; j<12*n; j++) //转1×n圈{for (i=0; i<8; i++) //一个周期转30度{P0 = REV; //取数据delay(15); //调节转速}}}/******************************************************** ** 主程序**********************************************************/main(){while(1){motor_ffw(5); //电机正转delay(1000); //换向延时motor_rev(5); //电机反转delay(1000); //换向延时}}。
1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c 所示:a. 单四拍b. 双四拍c八拍51单片机驱动步进电机的方法。
驱动电压12V,步进角为7.5度. 一圈360 度, 需要48 个脉冲完成该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、5:黄色、6:黑色。
采用51驱动ULN2003的方法进行驱动。
ULN2003的驱动直接用单片机系统的5V电压,可能力矩不是很大,大家可自行加大驱动电压到12V。
1.步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
四相步进电机原理图本文先介绍该步进电机的工作原理,然后介绍了其驱动器的软、硬件设计。
1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:a. 单四拍b. 双四拍c八拍图2.步进电机工作时序波形图2.基于AT89C2051的步进电机驱动器系统电路原理步进电机驱动器系统电路原理如图3:图3 步进电机驱动器系统电路原理图AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
使步进电机随着不同的脉冲信号分别作正转、反转、加速、减速和停止等动作。
图中L1为步进电机的一相绕组。
AT89C2051选用频率22MHz的晶振,选用较高晶振的目的是为了在方式2下尽量减小AT89C2051对上位机脉冲信号周期的影响。
四相步进电机原理图本文先介绍该步进电机的工作原理,然后介绍了其驱动器的软、硬件设计。
1. 步进电机的工作原理 该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图 开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:a. 单四拍b. 双四拍 c八拍图2.步进电机工作时序波形图 2.基于AT89C2051的步进电机驱动器系统电路原理 步进电机驱动器系统电路原理如图3:图3 步进电机驱动器系统电路原理图 AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
使步进电机随着不同的脉冲信号分别作正转、反转、加速、减速和停止等动作。
图中L1为步进电机的一相绕组。
AT89C2051选用频率22MHz的晶振,选用较高晶振的目的是为了在方式2下尽量减小AT89C2051对上位机脉冲信号周期的影响。
1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D 相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图、b、c所示:驱动电路:程序:大家对照一下程序就知道,本程序采用了八拍工作方式/***********************************************项目:步进电机正反转(EE01学习板演示程序)**作者:一线工人**网站:电子工程师之家 <>#define uchar unsigned char#define uint unsigned intuchar code FFW[8]={0xf1,0xf3,0xf2,0xf6,0xf4,0xfc,0xf8,0xf9};uchar code REV[8]={0xf9,0xf8,0xfc,0xf4,0xf6,0xf2,0xf3,0xf1};/********************************************************//*/* 延时t毫秒/* 时钟,延时约1ms/*/********************************************************/void delay(uint t){uint k;while(t--){for(k=0; k<123; k++){ }}}/********************************************************/ /*/*步进电机正转/*/********************************************************/ void motor_ffw(uint n){uchar i;uint j;for (j=0; j<12*n; j++) //转1×n圈{for (i=0; i<8; i++) //一个周期转30度{P0 = FFW; //取数据delay(15); //调节转速}}}/********************************************************/ /*/*步进电机反转/*/********************************************************/ void motor_rev(uint n){uchar i;uint j;for (j=0; j<12*n; j++) //转1×n圈{for (i=0; i<8; i++) //一个周期转30度{P0 = REV; //取数据delay(15); //调节转速}}}/******************************************************** ** 主程序**********************************************************/main(){while(1){motor_ffw(5); //电机正转delay(1000); //换向延时motor_rev(5); //电机反转delay(1000); //换向延时}}。
四相步进电机原理图及其驱动器的软硬件设计四相步进电机由两部分组成:电机本体和电机驱动器。
电机本体通常由两个固定部分组成:定子和转子。
定子由若干线圈组成,每个线圈与不同的相位电源相连接,分别称为A、B、C、D相。
转子由永磁体组成,并根据电机驱动器发出的脉冲信号进行定位。
原理图如下所示:电机驱动器软件设计:电机驱动器是通过控制电机的相序,将电流加到相应的线圈上,从而控制电机转动。
软件设计主要涉及到相序控制和脉冲信号的产生。
相序控制:根据电机的不同转速要求,通过改变相序可以控制电机的转速和转向。
相序控制可以通过编程实现,例如使用微控制器或可编程逻辑器件(FPGA)来控制电机的相序。
脉冲信号生成:脉冲信号是产生相序控制的关键,在驱动器中通常使用计数器来产生脉冲信号。
可以通过编程设置计数器的计数范围和计数速度,从而生成不同频率和占空比的脉冲信号。
电机驱动器硬件设计:电机驱动器的硬件设计包括电源供应、驱动器电路和保护电路。
电源供应:电机驱动器需要为电机提供稳定的电源电压和电流。
可以使用变压器和整流电路提供直流电源,也可以使用开关电源进行电源转换和稳压稳流。
驱动器电路:驱动器电路主要包括功率放大电路和控制逻辑电路。
功率放大电路负责驱动电机的线圈,通常使用功率晶体管、功率MOS管或功率集成电路来实现。
控制逻辑电路负责接收脉冲信号并产生相序控制信号,可以使用逻辑门电路和触发器电路来实现。
保护电路:保护电路用于保护电机和驱动器免受过压、过流等异常情况的损害。
常见的保护电路包括过压保护、过流保护和过热保护等。
综上所述,四相步进电机的驱动器软、硬件设计涉及到相序控制、脉冲信号生成、电源供应、驱动器电路和保护电路等内容,通过合理的设计和控制可以实现对电机的精确控制和驱动。
一.方案设计本设计采用电压为DC12V的四相八拍步进电机35BYJ46型电机,用ULN2803作为步进电动机驱动电路主芯片,以8255A作为8088并行输出接口,8088对步进电机的控制信号则通过8255A送到ULN2803.关于转向与转速,通过查表的方式实现,以逐次递增方向查表,依次输出表中数据,则步进电机正转;以逐次递减方向查表,则步进电机反转,即通过一个表实现步进电机的正转与反转。
转速则通过调用延时子程序,当调用延时较长的子程序时,则步进电机转速慢,当调用延时较短的子程序时,步进电机转速加快。
二、硬件系统的基本原理在工业控制系统里步进电动机是主要的控制元件之一。
步进电机具有快速启动停止,精确定位和能够使用数字信号进行控制,能够实现脉冲-角度转换的特点,因此得到广泛的应用。
在使用步进电机的控制系统里,脉冲分配器产生周期的控制脉冲序列,步进电机驱动器每接收一个脉冲就控制步进电机沿给定方向步进一步。
实验使用型号为35BYJ46的四相步进电机,采用四相八拍控制方式工作。
步进电机的转角和转动方向取决于各相中通电脉冲的个数和顺序。
8088控制机控制步进电机的电路见图1-1。
计算机将表1-1所示的各种通电方式转换成相应的状态控制字,通过计算机将各种状态字依次送到接口电路,并根据速度的要求作相应的延时处理。
由接口电路输出所需的控制脉冲通过驱动电路路使步进电机按要求动作。
驱动电路使用ULN2803A达林顿晶体管,反相驱动,驱动电流可以达到500mA。
驱动电路的作用是对控制脉冲进行放大,产生步进电机工作所需要的激励电流。
图1-1 步进电机控制实验原理图35BYJ46型步进电机使用DC12V 电压,采用四相八拍控制相序。
励磁线圈和励磁顺序如图1-2,控制相序如表1-1。
表中的PB10~PB13对应并行接口8055的B 口0~3位。
如果使用8255B 口的其它位则相应的状态字也要改变。
表1-1 步进电机四相八拍相序表步 序 相 序通电相 对应PB 口的输出值(状态字)PB13 PB12 PB11 PB10 1 0 0 0 1 A 01H 2 0 0 1 1 AB 03H 3 0 0 1 0 B 02H 4 0 1 1 0 BC 06H 5 0 1 0 0 C 04H 6 1 1 0 0 CD 0CH 7 1 0 00 D 08H 810 1 DA09H图1-2 励磁顺序和励磁线圈示意图1 2 3 4 5 6 7 85+ + + + + + + + 4 - - - 3- - - 2- - - 1- - -135425 (黑) 4 (黄) 3 (棕) 2 (蓝) 1 (红)+12VA ’B ’C ’D ’A B C DPB0 PB1 PB2PB38255驱动单元步进电动机(二)8255A可编程并行接口芯片1.8255简介Intel 8086/8088 系列的可编程外设接口电路(Programmable Peripheral Interface)简称 PPI,型号为8255(改进型为8255A及8255A-5),具有24条输入/输出引脚、可编程的通用并行输入/输出接口电路。
四相步进电机原理图
本文先介绍该步进电机的工作原理,然后介绍了其驱动器的软、硬件设计。
1. 步进电机的工作原理 该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,
就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图 开始时,开关SB 接通电源,SA 、SC 、SD 断开,B 相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C 、D 相
绕组磁极产生错齿,2、5号齿就和D 、A 相绕组磁极产生错齿。
当开关SC 接通电源,SB 、SA 、SD 断开时,由于C 相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C 相绕组的磁极对齐。
而0、3号齿和A 、B 相绕组产生错齿,2
、5号齿就和A 、D 相绕组磁极产生错齿。
依次类推,A 、B 、C 、D 四相绕组轮流供电,则转子会沿着A 、B 、C 、D 方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a 、b 、c 所示:
a. 单四拍
b. 双四
拍 c八拍
图2.步进电机工作时序波形图
2.基于AT89C2051的步进电机驱动器系统电路原理
步进电机驱动器系统电路原理如图3:
图3 步进电机驱动器系统电路原理图
AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
使步进电机随着不同的脉冲信号分别作正转、反转、加速、减速和停止等动作。
图中L1为步进电机的一相绕组。
AT89C2051选用频率22MHz的晶振,选用较高晶振的目的是为了在方式2下尽量减小AT89C2051对上位机脉冲信号周期的影响。
图3中的RL1~RL4为绕组内阻,50Ω电阻是一外接电阻,起限流作用,也是一个改善回路时间常数的元件。
D1~D4为续流二极管,使电机绕组产生的反电动势通过续流二极管(D1~D4)而衰减掉,从而保护了功率管TIP122不受损坏。
在50Ω外接电阻上并联一个200μF电容,可以改善注入步进电机绕组的电流脉冲前沿,提高了步进电机的高频性能。
与续流二极管串联的200Ω电阻可减小回路的放电时间常数,使绕组中电流脉冲的后沿变陡,电流下降时间变小,也起到提高高频工作性能的作用。