计算机控制系统 第2章(第2次课 离散化)
- 格式:pptx
- 大小:4.99 MB
- 文档页数:37
第一章课后参考答案1-1简述计算机控制系统的控制过程。
计算机控制系统的控制过程可以归纳为以下三个步骤:1)实时数据采集:对被控量进行采样测量,形成反馈信号;2)实时控制计算:根据反馈信号和给定信号,按一定的控制规律,计算出控制量;3)实时控制输出,向执行机构发出控制信号,实现控制作用。
1-2什么是实时性?有哪些因素影响系统的实时性?硬件:1)控制器计算速度2)传感器采集速度3)执行器反应时间4)A/D、D/A转换速度软件:1)操作系统调度2)中断响应处理方式(包括定时器)3)延时函数的设置实时性:即信号的输入、计算和输出都是在一定时间范围内即时完成的,超出这个时间就会失去控制时机,控制也就失去了意义。
1-3计算机控制系统的硬件由哪几部分组成?各部分作用是什么?计算机的硬件主要包括主机、输入输出通道和外部设备。
主机:主机是计算系统的核心,通过接口向系统的各个部分发出各种指令,对被控对象进行检测和控制。
输入输出通道:输入输出通道是计算机和生产对象之间进行信息交换的桥梁和纽带。
过程输入通道把生产对象的被控参数转换成计算机可以接收的数字信号,过程输出通道把计算机输出的控制命令和数据,转化成可以对生产对象进行控制的的信号。
过程输入输出通道包括模拟量输入输出通道和数字量输入输出通道。
外部设备:外部设备是实现计算机和外界进行信息交换的设备,简称外设,包括人机联系设备(操作台)、输入输出设备(磁盘驱动器、键盘、打印机、显示终端等)和外存贮器,其中操作台应具备显示功能,即根据操作人员的要求,能立即显示所要求的内容,还应有按键或开关,完成系统的启、停等功;操作台还要保证操作错误也不会造成恶劣后果,即应有保护功能。
1-4计算机控制系统的软件由哪几部分组成?各部分作用是什么?计算机控制系统软件分为系统软件、应用软件及数据库。
系统软件是有计算机生产厂家提供的专门用来使用和管理计算机的程序。
对用户来说,系统软件只是用来开发应用软件的工具,不需要自己设计。
《计算机控制系统》课程教学大纲课程名称:计算机控制系统课程代码:ELEA3042英文名称:Computer Control System课程性质:专业学位课程学分/学时:4学分/72学时(54+18)开课学期:第7学期适用专业:电气工程及其自动化先修课程:复变函数与积分变换、信号与系统、自动控制原理后续课程:无开课单位:机电工程学院课程负责人:杨歆豪大纲执笔人:杨歆豪大纲审核人:余雷一、课程性质和教学目标(在人才培养中的地位与性质及主要内容,指明学生需掌握知识与能力及其应达到的水平)课程性质:计算机控制系统是电气工程及其自动化专业的一门专业学位课程。
本课程针对电气工程及其自动化专业的特点,以离散控制理论等基础知识为主,同时结合自动控制理论、现代控制理论和复变函数等概念,并且以实际应用为导向,培养学生熟练的运算能力及进行科学分析、归纳和总结的能力,提高分析问题和解决问题的能力,从而为以后的从事实际工作和科学研究奠定一定的基础。
教学目标:计算机控制系统就是将计算机作为系统的控制器,从而实现对生产对象的有效控制,所以在本质上计算机控制讨论的就是系统的离散控制。
本课程的主要内容包括:信号的离散和恢复,Z变换与Z反变换,差分方程及其求解,离散系统的传递函数、状态方程,系统的稳定性、过渡过程和稳态误差,系统的离散化设计和模拟化设计,数字PID技术和改进,离散系统的能控性和可测性。
通过本课程的学习,要使学生了解和掌握计算机控制的基本概念、工作原理、初步分析、具有实用价值的设计方法,培养学生完成简单计算机控制系统构成、实时软件编制以及系统调试维护的基本能力,为毕业后参与计算机控制系统开发、调试和维护打下初步基础。
本课程的具体教学目标如下:1.了解计算机控制系统的定义、分类、结构和组成,较好的掌握香农采样定理和零阶保持器,理解计算机控制系统的本质是离散控制系统,从而掌握线性离散系统的数学描述(差分方程、Z传递函数)和分析方法(Z变换、Z反变换);2.领会S平面与Z平面的映射关系,掌握线性离散系统的稳定域,熟练灵活运用线性离散系统的稳定性判据,能够利用Z传递函数分析离散系统的过渡过程特性和离散系统的误差特性,能够利用系统的离散状态方程和输出方程分析系统的能控性和可测性;3.了解离散化设计方法的基本思路,重点掌握最少拍设计方法及其改进算法那,掌握数字控制器计算机程序实现的三种方法:直接程序设计法、串行程序设计法和并行程序设计法,会应用这三种方法得到数字控制器的差分方程表达式;4.了解计算机控制系统的模拟化设计思路及其成立的条件,掌握模拟控制器的各种离散化方法,并会用来求解数字控制器,重点掌握数字PID控制方法,了解数字PID控制的各种改进方法以及参数整定方法。
第1章习题B 习题B1-1 举例说明2-3个你熟悉的计算机控制系统,并说明与常规连续模拟控制系统相比的优点。
B1-2 利用计算机及接口技术的知识,提出一个用同一台计算机控制多个被控参量的分时巡回控制方案。
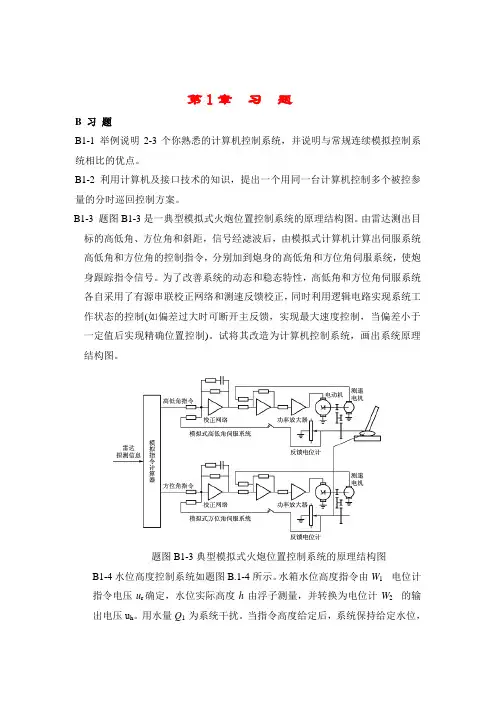
B1-3 题图B1-3是一典型模拟式火炮位置控制系统的原理结构图。
由雷达测出目标的高低角、方位角和斜距,信号经滤波后,由模拟式计算机计算出伺服系统高低角和方位角的控制指令,分别加到炮身的高低角和方位角伺服系统,使炮身跟踪指令信号。
为了改善系统的动态和稳态特性,高低角和方位角伺服系统各自采用了有源串联校正网络和测速反馈校正,同时利用逻辑电路实现系统工作状态的控制(如偏差过大时可断开主反馈,实现最大速度控制,当偏差小于一定值后实现精确位置控制)。
试将其改造为计算机控制系统,画出系统原理结构图。
题图B1-3典型模拟式火炮位置控制系统的原理结构图B1-4水位高度控制系统如题图B.1-4所示。
水箱水位高度指令由W1 电位计指令电压u r确定,水位实际高度h由浮子测量,并转换为电位计W2 的输出电压u h。
用水量Q1 为系统干扰。
当指令高度给定后,系统保持给定水位,如打开放水管路后,水位下降,系统将控制电机,打开进水阀门,向水箱供水,最终保持水箱水位为指令水位。
试把该系统改造为计算机控制系统。
画出原理示意图及系统结构图。
题图B1-4 水箱水位控制系统原理示意图B1-5 题图B1-5为一机械手控制系统示意图。
将其控制器改造为计算机实现,试画出系统示意图及控制系统结构图。
题图B1-5机械手控制系统示意图B1-6题图B1-6为仓库大门自动控制系统示意图。
试将其改造为计算机控制系统,画出系统示意图。
题图B1-6 仓库大门自动控制系统示意图B1-7车床进给伺服系统示意图如题图B1-7所示。
电动机通过齿轮减速机构带动丝杠转动,进而使工作台面实现直线运动。
该系统为了改善系统性能,利用测速电机实现测速反馈。
试将该系统改造为计算机控制系统,画出系统示意图。
东南大学自动化学院实验报告课程名称:计算机控制技术第 2 次实验实验名称:实验三离散化方法研究院(系):自动化学院专业:自动化姓名:学号:实验室:416 实验组别:同组人员:实验时间:2014年4月10日评定成绩:审阅教师:一、实验目的1.学习并掌握数字控制器的设计方法(按模拟系统设计方法与按离散设计方法);2.熟悉将模拟控制器D(S)离散为数字控制器的原理与方法(按模拟系统设计方法);3.通过数模混合实验,对D(S)的多种离散化方法作比较研究,并对D(S)离散化前后闭环系统的性能进行比较,以加深对计算机控制系统的理解。
二、实验设备1.THBDC-1型控制理论·计算机控制技术实验平台2.PCI-1711数据采集卡一块3.PC机1台(安装软件“VC++”及“THJK_Server”)三、实验原理由于计算机的发展,计算机及其相应的信号变换装置(A/D和D/A)取代了常规的模拟控制。
在对原有的连续控制系统进行改造时,最方便的办法是将原来的模拟控制器离散化。
在介绍设计方法之前,首先应该分析计算机控制系统的特点。
图3-1为计算机控制系统的原理框图。
图3-1 计算机控制系统原理框图由图3-1可见,从虚线I向左看,数字计算机的作用是一个数字控制器,其输入量和输出量都是离散的数字量,所以,这一系统具有离散系统的特性,分析的工具是z变换。
由虚线II向右看,被控对象的输入和输出都是模拟量,所以该系统是连续变化的模拟系统,可以用拉氏变换进行分析。
通过上面的分析可知,计算机控制系统实际上是一个混合系统,既可以在一定条件下近似地把它看成模拟系统,用连续变化的模拟系统的分析工具进行动态分析和设计,再将设计结果转变成数字计算机的控制算法。
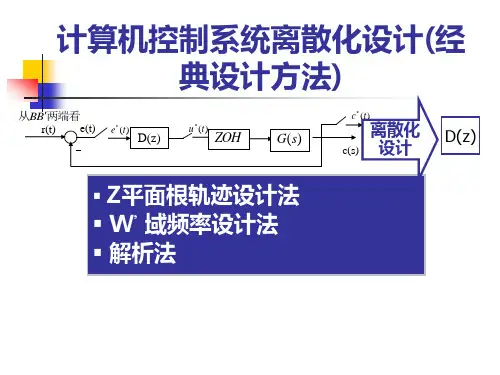
也可以把计算机控制系统经过适当变换,变成纯粹的离散系统,用z变化等工具进行分析设计,直接设计出控制算法。
按模拟系统设计方法进行设计的基本思想是,当采样系统的采样频率足够高时,采样系统的特性接近于连续变化的模拟系统,此时忽略采样开关和保持器,将整个系统看成是连续变化的模拟系统,用s域的方法设计校正装置D(s),再用s域到z域的离散化方法求得离散传递函数D(z)。