chap05计算机控制系统模拟化设计
- 格式:ppt
- 大小:2.76 MB
- 文档页数:83

计算机控制技术综合课程设计方案清晨的阳光透过窗帘,洒在键盘上,伴随着一杯热咖啡的香气,我开始构思这个“计算机控制技术综合课程设计方案”。
这个方案不仅要体现计算机控制的精髓,还要让学生在实践中掌握核心技能,下面是我的思路。
一、课程目标我们要明确课程目标。
这不仅仅是教会学生一些编程语言和算法,更重要的是让他们理解计算机控制系统的设计理念、工作原理和应用场景。
简单来说,我们要培养的是未来的计算机控制系统设计师。
二、课程内容1.基础理论课程的前半部分,我们会重点讲解计算机控制的基础理论,包括控制系统的基本概念、数学模型、控制器设计等。
这部分内容虽然枯燥,但却是后续实践的基础。
我会用生动的例子和实际应用场景来引导学生,让他们对这些理论产生兴趣。
2.编程实践是编程实践环节。
我们会教授学生如何使用C/C++、Python等编程语言来设计计算机控制系统。
在这个过程中,学生将学会如何将理论应用到实际项目中,如何处理各种复杂问题。
3.硬件接口除了编程,我们还会教授学生如何使用各种硬件接口,如串口、网络接口等。
这部分内容会让学生了解到计算机控制系统与外部设备之间的通信方式,为后续的实践项目打下基础。
4.项目实践在课程的我们会安排一系列项目实践。
这些项目将涵盖不同的应用领域,如智能家居、工业自动化等。
学生将分组进行项目设计,从需求分析、系统设计到编程实现,全方位锻炼自己的能力。
三、教学方法1.案例教学我会采用案例教学的方法,通过分析经典的计算机控制系统案例,让学生理解理论知识在实际中的应用。
同时,案例教学也能激发学生的兴趣,让他们主动参与到课程中来。
2.实践教学实践教学是本课程的核心。
我会安排大量的实验和项目实践,让学生在实践中掌握计算机控制技术的应用。
还会鼓励学生参加各种比赛和项目,提升他们的实际操作能力。
3.互动教学在教学过程中,我会鼓励学生提问和发表自己的观点。
通过互动,我可以及时了解学生的掌握情况,调整教学进度和难度。
课程设计任务书课程设计题目控制系统仿真设计功能使得电动车控制系统的系统在校订后技术指标阶跃响应的超调量小于5%,调理时间小于 4s。
工作量二周第一周学习怎样使用 MATLAB 软件与控制系统的仿真等,第二周选择课题而后进行分组查工作计划询资料,最后借助软件对实验题目进行编程改正和剖析,使实验达到题目要求的最优化成效。
指导教师考语目录第 1 章设计题目及要求 (1)设计题目 (1)要求 (1)第 2章校订前系统性能 (2)时域性能 (2)频域性能 (5)第 3章校订环节设计 (6)校订方法选择 (6)控制参数整定 (6)第 4章校订后系统性能 (7)时域性能 (7)频域性能 (9)结论 (10)心得领会 (11)第 1 章设计题目及要求1.1 设计题目:若系统的数学模型及控制环节的传达函数为G(s)=40 /((ss+3)( s+6)),设计校订装置。
电动车控制系统:某电动车控制系统如图:1.2 要求:系统在阶跃响应的超调量小于5%,调理时间小于4s。
第 2 章校订前系统性能2.1 时域性能(1)、绘制未加入校订装置的系统开环阶跃响应曲线,依据系统的开环传达函数,程序以下:function [Tp,Mp,Tr,Ts]=stepa(G)[Y,t] = step(G);cs=length(t);yss=Y(cs);[ctp,tp]=max(Y);Tp=t(tp);Mp=100*(ctp-yss)/yssk=cs+1;n=0;while n==0k=k-1;if Y(k)<0.98*yssn=1;endendt1=t(k);k=cs+1;n=0;while n==0k=k-1;if Y(k)>1.02*yssn=1;endendt2=t(k);if t1>t2Ts=t1;elseTs=t2;Endclear all;clear all;num=2.2;den=conv([1,0],conv([0.3,1],[0.17,1])); sys1=tf(num,den);sys2=feedback(sys1,1);figure(1);margin(sys1)figure(2);step(sys2)[Tp,Mp,Tr,Ts]=stepa(sys2)Mp =Tp =Mp =Tr =Ts =Step Response1edtui lpmA0123456Time (sec)系统的阶跃响应曲线图 2-12.2 频域性能由 2.1 节的程序能够获取系统的频域曲线图(2-2)以下所示)B d (e dtu i n g a M) g e d ( e s a h PBode DiagramGm = 12.4 dB (at 4.43 rad/sec) , P m = 43.8 deg (at 1.84 rad/sec)50-50-100-150-90-135-180-225-270-10123 1010101010Frequency (rad/sec)控制系统的频域响应曲线图 2-2MATLAB运转结果开环传达函数为:G(s)=2.2 /( s(0.3s +1)( 0.17s+1))系统是稳固的,可是响应时间和超调量都较之题目要求大第 3 章校订环节设计3.1 校订方法选择因为题目要求系统阶跃响应的超调量小于 5%,超调时间小于4s ,系统固然稳固,可是响应时间较快和超调量较大,因为放大系数 K 对超调量有影响,为此需要改变放大系数 K 的值来知足题目要求的预期值,依据系统的时域性能和频域性能可知合适采用比率- 微分控制器( PD 控制器)从比率环节和微分环节进行校正,从物理的角度来剖析,他能够降低系统的最大超调量,改变动向性能,从频次特征的角度来说,它能够增添系统的相角裕量,是系统的震荡减弱。
摘要随着数字控制器用来调节模拟对象被越来越多的应用在工业生产中,并在现代工业生产中发挥着越来越重要的作用。
本课设提出了基于模拟对象的数字控制系统的设计。
通过对模拟对象进行数学建模,并根据要达到的控制性能指标设计控制策略,在MABLAB中进行仿真,并通过力控组态软件实现运行,取得了较好的控制效果。
通过本课程设计,可以加深对模拟对象的分析、建模、仿真已及利用组态软件来实现的理解,熟悉和掌握控制系统设计的方法,对提高学生观察、分析和解决问题能力有很大帮助。
关键词:模拟对象,MABLAB,串联校正,数字控制系统,控制策略,力控目录第一章概述 (1)1.1 题目背景及应用意义 (1)1.2 本文内容及工作安排 (1)第二章系统组成及被控对象分析 (2)2.1 系统组成 (2)2.2 被控对象分析 (3)第三章控制策略设计及仿真研究 (4)3.1 控制策略设计 (4)3.2 仿真研究 (8)第四章控制策略实现 (9)4.1 组态环境下控制策略编程实现 (10)4.2 运行结果分析................................... 错误!未定义书签。
第五章总结 . (13)参考文献 (14)第一章概述1.1 题目背景及应用意义我们组设计的题目是基于模拟对象数字控制系统的设计与实践。
数字控制器应用非常灵活,且能使系统变得稳定,并且易于集成优化,能够实现先进的控制技术,因此,选择数字控制器来调节模拟对象被越来越多的应用在工业生产中,并在现代工业生产中发挥着重要的作用。
根据模拟对象数字控制系统的组成、工作原理,通过对模拟对象建立数学模型。
根据所给的被控对象的动态性能指标分析控制算法,设计所需要的控制器,来实现性能指标的要求。
基于模拟对象数字控制系统的实验主要由计算机、多功能数据采集卡和模拟对象电路板组成。
在实物应用之前先通过计算机模拟的仿真,再在仿真过程中发现不足之处并予以改进,把设计方案完善,使仿真设计达到要求即可,然后我们就可以进行实物上的实验。
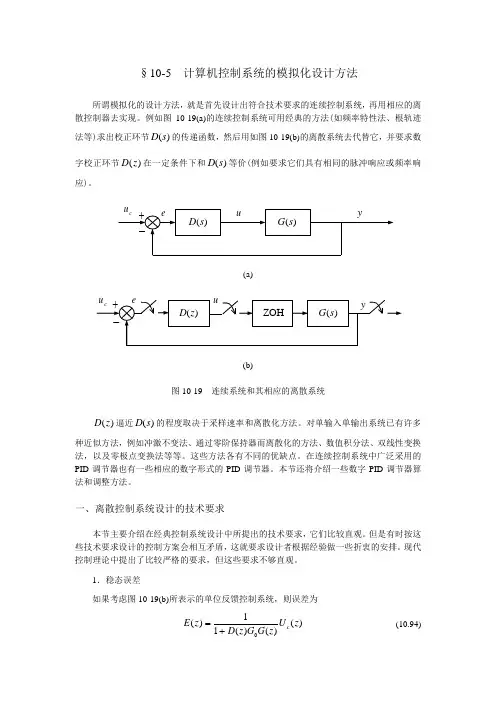
§10-5 计算机控制系统的模拟化设计方法所谓模拟化的设计方法,就是首先设计出符合技术要求的连续控制系统,再用相应的离散控制器去实现。
例如图10-19(a)的连续控制系统可用经典的方法(如频率特性法、根轨迹法等)求出校正环节)(s D 的传递函数,然后用如图10-19(b)的离散系统去代替它,并要求数字校正环节)(z D 在一定条件下和)(s D 等价(例如要求它们具有相同的脉冲响应或频率响应)。
(a)(b)图10-19 连续系统和其相应的离散系统)(z D 逼近)(s D 的程度取决于采样速率和离散化方法。
对单输入单输出系统已有许多种近似方法,例如冲激不变法、通过零阶保持器而离散化的方法、数值积分法、双线性变换法,以及零极点变换法等等。
这些方法各有不同的优缺点。
在连续控制系统中广泛采用的PID 调节器也有一些相应的数字形式的PID 调节器。
本节还将介绍一些数字PID 调节器算法和调整方法。
一、离散控制系统设计的技术要求本节主要介绍在经典控制系统设计中所提出的技术要求,它们比较直观。
但是有时按这些技术要求设计的控制方案会相互矛盾,这就要求设计者根据经验做一些折衷的安排。
现代控制理论中提出了比较严格的要求,但这些要求不够直观。
1.稳态误差如果考虑图10-19(b)所表示的单位反馈控制系统,则误差为)()()(11)(0z U z G G z D z E c +=(10.94)如果特征方程0)()(10=+z G G z D的根全部位于z 平面内以原点为圆心的单位圆内,则此闭环系统是稳定的。
这时,利用z 变换的终值定理就可以分析系统在各种输入条件下的稳态误差。
单位阶跃输入时,1)(-=z zz U c ,则 pz k K z zz G G z D z k e 1ˆ1)()(11)1(lim )(lim 01=-⋅+⋅-=→∞→ (10.95)式中)]()(1[lim 01z G G z D K z p +=→称为静态位置误差系数。

加固计算机温度控制系统的设计杨雪梅 王晓东(国营第785厂军品第一研究所,山西太原030024)摘 要:为低温工作环境中的加固计算机设计的加热控制系统,介绍了由宽温电源模块,单片机89C20501、数字温度测控芯片DS1620及固体继电器组成的电路来控制各加热板工作,通过加热,使加固计算机在低温环境中正常工作,最后给出了相应的软件设计流程。
关键词:加固;温度传感器;固体继电器;电加热板中图分类号:TP338 文献标识码:A0 引言随着国防、军队及工业控制等领域的信息化、数字化、现代化程度越来越高,高性能特殊研制的抗恶劣环境的加固计算机的需求也在不断增加。
普通的计算机在高温、低温、潮湿、霉菌、淋雨、沙尘以及强烈的振动冲击和电磁干扰这些恶劣环境中是根本无法工作的,就必须选择、应用和发展高性能特殊研制的抗恶劣环境计算机,即通常简称的“加固机”。
常规的计算机主板(包括工控主板)、底板、硬盘、电源,特别是液晶显示屏等均不能满足恶劣条件下的环境指标要求。
经试验验证一般在-10℃以下,普通的商用计算机就无法正常工作,需要采取后天加固措施,使计算机能够在极低的温度环境下工作。
为此,我们设计了温度控制系统,使计算机能够在-25℃、-40℃等低温条件下正常工作。
1 系统硬件设计1.1 温度控制系统的组成温度控制系统由温度控制板和电加热板组成。
系统电路原理图见图1。
将交流220V输入到宽温的AC/DC电源模块,通过转换为温控电路提供+5V直流电源,由温度传感器DS1620自动监测机箱内的温度,当温度低于3℃时,单片机通过交流固体继电器接通加热板,给机箱内小环境加热,同时加热指示灯亮,温度达到5℃后,自动断开加热板,加热指示灯灭。
计算机工作过程中,若温度又继续变低,低于3℃时,又开始接通加热板加热,一直循环。
1.2 温度控制板工作原理简介温度控制板的主控芯片选用A TMEL公司的89C2051,它体积小巧,端口数和ROM可满足本电路功能的要求,我们选用6M的主频。