单纯形法求解原理过程
- 格式:pdf
- 大小:97.14 KB
- 文档页数:4
单纯形法求解过程单纯形法是一种经典的线性规划求解方法,它是由乔治·达竞士等人在1947年提出的。
该方法的基本思想是,通过在单纯形空间内不断移动顶点的位置来寻找最优解。
单纯形法是目前广泛应用的线性规划求解方法之一,它求解线性规划问题可大大地简化计算过程。
单纯形法的求解过程包括以下几个步骤:1. 将线性规划问题转化为标准形式线性规划问题的标准形式为:$ \max_{x} \ \ c^T x $$s.t. \ Ax=b$$x\geq 0$其中,$x$是要求解的向量;$b$是一个常数向量;$A$是一个$m\times n$的矩阵;$c$是一个常数向量。
2. 初始化单纯形表因为单纯形法是通过移动顶点来寻找最优解的方法,因此需要初始化单纯形表。
单纯形表是将原始的约束条件表示为不等式形式时形成的。
例如,对于一个带有3个变量的线性规划问题,其单纯形表的形式如下:CB | X1 | X2 | X3 | X4 | RHS----|-----|-----|-----|-----|----0 | a11| a12| a13| 0 | b10 | a21| a22| a23| 0 | b20 | a31| a32| a33| 0 | b31 | z1 | z2 | z3 | 0 | 0其中,CB代表成本系数,X1、X2、X3、X4分别代表变量。
a11、a12、a13等代表矩阵A中的元素,b1、b2、b3代表矩阵b中的元素。
3. 选择进入变量和离开变量在单纯形表中,规定最后一列为等式右边的常数(RHS),即b。
在单纯形法的求解过程中,首先需要选择一个“进入变量”,即在单纯形表的第一行中,寻找一个系数为正的变量,使得将其加入目标函数后,目标函数值可以上升。
这里以X1为例,X1为进入变量。
接着,需要选择一个“离开变量”,即在单纯形表中,寻找一个使得添加X1变量后,约束条件不改变且取得约束条件中系数最小的一个变量离开。

单纯形法原理单纯形表单纯形法原理与单纯形表的详实解析在数学领域中,特别是在线性规划问题的研究中,单纯形法是一种十分重要的求解方法。
它是由美国数学家乔治·丹齐格在1947年提出的一种迭代算法,用于解决具有多个变量和约束条件的优化问题。
本文将围绕单纯形法的原理和单纯形表这两个核心概念进行详细的解析。
一、单纯形法原理单纯形法的基本思想是通过一系列可行解逐步逼近目标函数的最大值或最小值。
这些可行解形成一个点集,称为单纯形。
每次迭代过程中,算法都会选择一个新的顶点作为下一个单纯形的顶点,这个新的顶点应该使目标函数有所改进。
重复这一过程,直到达到最优解或者满足停止准则为止。
单纯形法的步骤如下:1. 构造初始单纯形:首先,需要找到一个包含至少两个可行解的多边形,这就是初始单纯形。
2. 判断是否达到最优解:如果当前顶点的目标函数值已经是全局最优解,那么算法结束。
3. 选择换入变量:如果当前顶点不是最优解,那么需要选择一个非基变量来替换基变量。
这个被选中的非基变量应该是能够使目标函数最大化的变量。
4. 计算换出变量:确定了换入变量后,需要计算相应的换出变量。
这可以通过解一个线性方程组来实现。
5. 更新单纯形:用新选出的变量替换旧的变量,得到新的单纯形。
6. 回到第二步,继续判断是否达到最优解。
二、单纯形表单纯形表是单纯形法的重要工具,它记录了单纯形法每一步的详细信息。
每个列代表一个基变量,而每个行则代表一个约束条件。
表中还包括目标函数的系数、常数项以及松弛变量和剩余变量的系数。
在单纯形表中,每一行代表一个约束条件,包括它的系数、常数项以及松弛变量和剩余变量的系数。
每一列则代表一个基变量,包括它的系数和该变量对应的值。
在每一步迭代过程中,单纯形表都会被更新以反映当前的解状态。
通过观察单纯形表的变化,我们可以清楚地看到迭代过程是如何进行的,以及如何通过调整基变量来改进目标函数的值。
总结来说,单纯形法是一种有效的解决线性规划问题的方法,其核心在于构造并不断更新单纯形表,通过迭代寻找最优解。



单纯形法原理及例题
单纯形法原理:
单纯形法是求解线性规划问题的一种数学方法,它是由美国数学家卢克·单纯形于1947年发明的。
用单纯形法求解线性规划的过程,往往利用线性规划的对偶形式,将原问题变换为无约束极大化问题,逐步把极大化问题转换为标准型问题,最后利用单纯形法的搜索方法求解满足所有约束条件的最优解。
例题:
问题:求解最小化目标函数z=2x1+x2的线性规划问题,约束条件如下:
x1+2x2≥3
3x1+x2≥6
x1,x2≥0
解:将上述线性规划问题转换为无约束极大化问题,可得:
极大化问题:
Max z=-2x1-x2
s.t. x1+2x2≤3
3x1+x2≤6
x1,x2≥0
将极大化问题转换为标准型问题,可得:
Max z=-2x1-x2
s.t. x1+2x2+s1=3
3x1+x2+s2=6
x1,x2,s1,s2≥0
运用单纯形法的搜索方法求解:
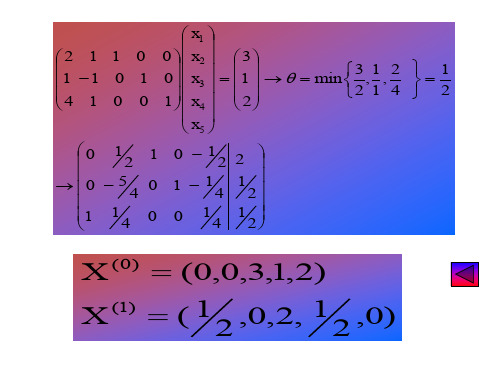
令x1=0,x2=0,则可得s1=3,s2=6,即(0,0,3,6)是单纯形的初始解;
令z=-2x1-x2=0,代入约束条件,可得x1=3,x2=3,则可得s1=0,s2=0,即(3,3,0,0)是新的单纯形解。
由于s1=s2=0,说明x1=3,x2=3是线性规划问题的最优解,且最小值为z=2*3+3=9。
单纯形法求解过程单纯形法是一种用于求解线性规划问题的迭代算法。
它是由美国数学家George Dantzig在1947年提出的。
单纯形法的目标是通过不断地沿着一些方向逼近最优解,最终找到使目标函数取得最大(或最小)值的最优解。
单纯形法的求解过程可以分为以下几个步骤:1.标准化问题:将线性规划问题转化为标准化形式。
标准化的目的是将原问题转化为一个等价问题,使得约束条件全部为等式,且目标函数的系数都为非负数。
2.设置初始解:选择一个初始可行解作为起始点。
起始点可以通过代入法求解出来,或者通过其他启发式算法得到。
初始可行解需要满足所有约束条件,即满足等式以及非负性约束。
3.检验最优性:计算当前解的目标函数值,并检验这个值是否是最优解。
如果当前解是最优解,算法终止;否则,进入下一步。
4.选择进入变量:从目标函数的系数中选择一个可以增大(最大化问题)或减小(最小化问题)目标函数值的变量作为进入变量。
选择进入变量的策略可以有多种,例如最大增益法或者随机选择法。
5.计算离基变量:选择一个出基变量并将其移出基变量集合。
离基变量的选择通常采用最小比率法,即选择使得约束条件最紧张的变量。
6.更新解:通过求解一个新的线性方程组来计算新的解,更新基变量集合和非基变量集合。
由于每次只有一个变量进基,一个变量出基,将保持可行解的性质。
7.转到步骤3:重复步骤3-6,直到找到最优解。
单纯形法的关键在于选择进入变量和离基变量,以及求解线性方程组。
进入变量的选择决定了算法在解空间中的方向,而离基变量的选择决定了算法沿着哪个方向逼近最优解。
在实际应用中,单纯形法往往需要进行大量的迭代计算,因此效率可能不是很高。
为了提高效率,可以采用一些改进的单纯形法,例如双线性法、内点法等。
总结起来,单纯形法是一种基于迭代的算法,通过每次选择一个进入变量和一个离基变量来逐步逼近最优解。
虽然它的计算复杂度较高,但是在实践中仍然是一种很受欢迎的求解线性规划问题的方法。
单纯形法原理
单纯形法是线性规划中常用的一种方法,用于求解极值问题。
它的基本思想是通过不断迭代的方式,逐渐接近最优解。
单纯形法的基本步骤如下:
1. 将线性规划问题转化为标准型。
标准型的约束条件为≤,目标函数为最大化,且所有变量的取值范围为非负数。
2. 利用人为变量引入的方法,将标准型问题转化为初始单纯形表。
3. 选择合适的初始基变量,并计算出对应的基变量解。
4. 计算单纯形表中的评价函数。
如果所有评价函数中的系数都为非负数,则当前基变量解为最优解,过程结束。
否则,继续进行下一步。
5. 选择进入变量和离开变量。
进入变量是指取值为负的评价函数系数对应的变量,离开变量是指进入变量在当前基变量解中最先达到0的变量。
6. 迭代计算,通过变换基变量,逐渐接近最优解。
具体的计算方式为将进入变量对应列调整为单位向量,同时更新初始单纯形表中其它列的数值。
7. 重复步骤4至步骤6,直至得到最优解为止。
值得注意的是,单纯形法的执行依赖于初始基变量的选择,不同的初始基变量可能会得到不同的最优解。
因此,在实际应用中,需要通过灵活选择初始基变量来提高求解效果。
运筹学单纯形法例题求解过程摘要:一、运筹学单纯形法概述二、单纯形法求解步骤1.确定基变量和初始基本可行解2.编制初始单纯形表3.判断基本可行解是否为最优解4.迭代求解最优解三、例题求解过程1.题目描述2.化为标准型3.建立初始单纯形表4.迭代计算四、总结正文:一、运筹学单纯形法概述运筹学单纯形法是一种求解线性规划问题的方法,它的主要思想是通过不断迭代,逐步优化基变量的值,从而求得问题的最优解。
单纯形法可以有效地解决具有如下特点的问题:目标函数线性,约束条件线性,变量非负。
二、单纯形法求解步骤1.确定基变量和初始基本可行解在求解线性规划问题时,首先需要确定基变量,即在约束条件方程组中,选择一部分变量作为基变量,用于表示其他变量。
通过寻找或构造单位矩阵的方法,可以确定基变量,从而求出初始基本可行解。
2.编制初始单纯形表基于初始基本可行解和线性规划模型提供的信息,可以编制初始单纯形表。
单纯形表包含了基变量、非基变量、目标函数系数、约束条件系数和检验数等信息,用于描述问题的基本情况。
3.判断基本可行解是否为最优解通过检验数cj-zj 来判断基本可行解是否为最优解。
如果所有非基变量的检验数cj-zj<0,说明已经达到最优解,计算停止。
如果存在cj-zj>0,但所有cj-zj>0 所在列对应的所有aij<0,说明无最优解,计算停止。
如果至少存在一个cj-zj>0,并且所对应的所有j 列中至少有一个aij>0,说明没有达到最优解,需要继续迭代求解。
4.迭代求解最优解在迭代过程中,首先需要确定换入变量,即选择最大检验数对应的非基变量。
然后,利用特定公式计算出换出变量,即在基变量中选择一个与换入变量对应的变量进行替换。
接着,生成新的单纯形表,将换入变量和换出变量进行置换后,调整新基变量对应的矩阵为单位矩阵。
最后,重新计算检验数和目标函数值,返回第二步,直至找到最优解。
三、例题求解过程假设有一个线性规划问题,目标函数为MINfx1x2Mx4Mx6,约束条件为:3x1 + 4x2 ≤ 122x1 + 3x2 ≤ 10x1, x2 ≥ 0首先,将约束条件化为标准型:3x1 + 4x2 + s1 = 122x1 + 3x2 + s2 = 10x1, x2 ≥ 0然后,建立初始单纯形表:| 基变量| 非基变量| 目标函数系数| 约束条件系数| 检验数| ---------------------------------------------------------------------行1 | x1 | s1 | -3 | -4 | -12 |行2 | x2 | s2 | -4 | -3 | -10 |行3 | x1 | x2 | 0 | 0 | 0 | 行4 | s1 | x2 | 0 | 3 | 0 | 行5 | s2 | x1 | 0 | 2 | 0 | 根据初始单纯形表,可以得到初始基本可行解为:x1 = 0, x2 = 0接下来,判断基本可行解是否为最优解:c1 = -12, c2 = -10, c3 = 0, c4 = 0, c5 = 0由于c3、c4 和c5 都小于等于0,所以基本可行解不是最优解,需要继续迭代求解。
单纯形法
需要解决的问题:
如何确定初始基本可行解;
如何由一个基本可行解迭代出另一个基本可行解,同时使目标函数获得较大的下降;
如何判断一个基本可行解是否为最优解。
min f(X)=-60x1-120x2
s.t. 9x1+4x2+x3=360
3x1+10x2+x4=300
4x1+5x2+x5=200
x i≥0 (i=1,2,3,4,5)
(1) 初始基本可行解的求法。
当用添加松弛变量的方法把不等式约
束换成等式约束时,我们往往会发现这些松弛变量就可以作为
初始基本可行解中的一部分基本变量。
例如:x1-x2+x3≤5
x1+2x2+x3≤10
x i≥0
引入松弛变量x4,x5后,可将前两个不等式约束换成标准形式
x1-x2+x3+x4=5
x1+2x2+x3+x5=10
x i≥0 (i=1,2,3,4,5)
令x1=x2=x3=0,则可立即得到一组基本可行解
x1=x2=x3=0,x4=5,x5=10
同理在该实例中,从约束方程式的系数矩阵
中可以看出其中有个标准基,即
与B对应的变量x3,x4,x5为基本变量,所以可将约束方程写成
X3=360-9x1-4x2
x4=300-3x1-10x2
x5=200-4x1-5x2
若令非基变量x1=x2=0,则可得到一个初始基本可行解X0
X0=[0,0,360,300,200] T
判别初始基本可行解是否是最优解。
此时可将上式代入到目标函数中,得:
F(X)=-60x1-120x2
对应的函数值为f(X0)=0。
由于上式中x1,x2系数为负,因而f(X0)=0不是最小值。
因此所得的解不是最优解。
(2) 从初始基本可行解X0迭代出另一个基本可行解X1,并判断X1是否
为最优解。
从一个基本可行解迭代出另一个基本可行解可分为
两步进行:
第一步,从原来的非基变量中选一个(称为进基变量)使其成为基本变量;
第二步,从原来的基本变量中选一个(称为离基变量)使其成为新的非基变量。
选择进基和离基变量的原则是使目标函数值得到最快的下降和使所有的基本变量值必须是非负。
在目标函数表达式中,非基变量x1,x2的系数是负值可知,若x1,x2不取零而取正值时,则目标函数还可以下降。
因此,只要目标函数式中还存在负系数的非基变量,就表明目标函数还有下降的可能。
也就还需要将非基本变量和基本变量进行对换。
一般选择目标函数式中系数最小的(即绝对值最大的负系数)非基变量x2换入基本变量,然后从x3,x4,x5中换出一个基本变量,并保证经变换后得到的基本变量均为非负。
当x1=0,约束表达式为:
X3=360-4x2≥0
x4=300-10x2≥0
x5=200-5x2≥0
从上式中可以看出,只有选择
x2=min{}=30
才能使上式成立。
由于当x2=30时,原基本变量x4=0,其余x3和x5都满足非负要求。
因此,可以将x2,x4互换。
于是原约束方程式可得到:4x2+x3=360-9x1
10x2 =300-3x1-x4
5x2+x5=200-4x1
用消元法将上式中x2的系数列向量变[4,10,5]T换成标准基向量[0,1,0]T。
其具体运算过程如下:
-*4/10 : x3=240-78x1/10+4 x4/10
/10 : x2 =30-3x1/10-x4/10
-*5/10 : x5=50-25x1/10+5x4/10
再将上式代入到目标函数式中,得到:
F(X)=-60x1-120x2=-3600-24 x1+12 x4
令非基本变量x1=x4=0,即可得到另一个基本可行解。
X1=[0,30,240,0,50] T
目标函数F(X1)=-3600,比前一值f(X0)=0小了3600。
由得到的目标表达式中x1的系数是负的,因而基本可行解还不是最优解。
(3)继续求出第3个基本可行解,并判断是否为最优解。
同理可求出下一个基本可行解X2。
而在第2个基本可行解的目标函数表达式中只有x1的系数是负值。
所以,应选取x1为进基变量。
然后分析上面得到的约束函数表达式。
从x2,x3和x5中选取一个离基变量,并保证变化后得到的基本变量均为非负。
当x4=0时,约束表达式有:
X3=240-39x1/5≥0
x2=30-3x1/10≥0
x5=50-5x1/2≥0
从上式中可以看出:
x1=min{}=20
才能使约束方程成立。
由于当x1=20时,原基本变量x5=0,其余x2,X3均为非负。
因此,可以将x1和x5互换。
并由第2基本可行解的约束方程得到:
x3-39x1/5=240+2x4/5
x2 +3x1/10=30-x4/10
5x1/2=50+x4/2 -x5
用消元法将上式中x1的系数[39/5,3/10,5/2]T变换成标准基向量
[0,1,0]T。
即
x1=20+x4/5 -2x5/5
x2=24-4x4/25+3x5/25
x3=84-29x4/25+78x5/25
再将上式代入到目标函数表式中,
F(X)=-60x1-120x2=-3600-24 x1+12 x4=-4080+36x4/5+48x5/5
令非基本变量x4=x5=0,由此可得到第3个基本可行解X2
X2=[x12, x22, x32, x42, x52] T=[20,24,84,0,0] T
代入目标函数中,得F(X2)=-4080是最小值。
因为该式中的所有非基本变量x4,x5的系数都为正数。
再做任何迭代运算都不可能使目标函数值下降了。
所有此基本可行解X2就是最优解。