单纯形法基本原理及实例演示
- 格式:ppt
- 大小:2.81 MB
- 文档页数:35

单纯形法一、单纯形法的原理线性方程组的解:⎩⎨⎧=----=+-+-4322425432154321x x x x x x x x x x (1) 5个未知数,两个方程组。
方程的解多于1个。
两种初等变换:51)方程组的任一方程乘上一个不为零的数。
2)方程组的任一方程两边同乘上一个常数,分别加到另一个方程的两边。
式(1)做变换得到:(①×-1)⎩⎨⎧=-+-=+-+-2322242543254321x x x x x x x x x (2) 式(2)做变换得到:(②×2)⎩⎨⎧=-+-=---232642354325431x x x x x x x x (3)方程组(1)、(2)、(3)同解,可令0543===x x x 。
得到:61=x ,22=x 。
选择3x ,4x ,5x 不同的值,相应地有不同的1x 和2x 的值,因此方程组有多组解。
基本变量:如果变量i x 的系数在某一个方程为1,而在其它所有方程为0,则称i x 为该方程组中的基本变量。
非基本变量:凡不是基本变量的变量都叫做非基本变量。
1x ,2x 为基本变量;3x ,4x ,5x 为非基本变量。
旋转运算:运用初等变换,可使一给定变量化为基本变量,这一运算,成为旋转运算。
基本变量的个数,与方程的个数相同。
基本解:设非基本变量为0,求得相应的基本变量的值,得到一组解,这组解称为基本解。
基本可行解:基变量的值为非负时的基本解称为基本可行解。
单纯形法的思路;1)先不考虑目标函数,从满足约束条件开始,寻求一个初始基本可行解; 2)求具有较佳目标函数值的另一个基本可行解,以改进初始解;3)对目标函数做有限次的改善。
当某一个基本可行解不能再得到改善时,即求得最优解,单纯形法结束。
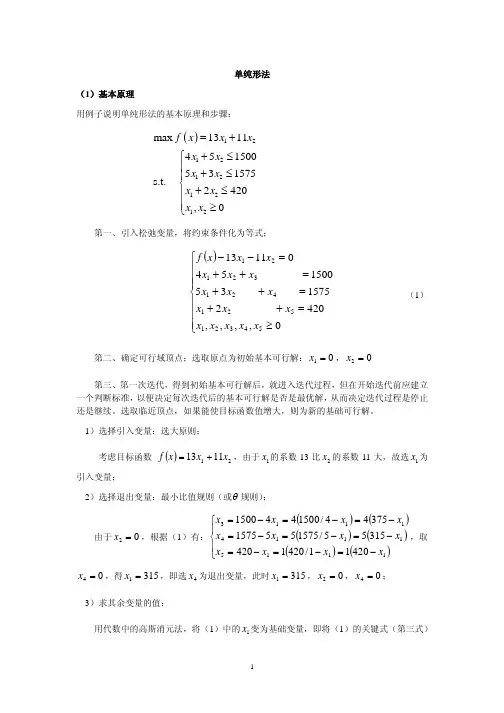
二、单纯形算法例:54321325max x x x x x Z +-++= 约束条件为:⎪⎩⎪⎨⎧≥≥≥≥≥=+++=+++0,0,0,0,0743********53214321x x x x x x x x x x x x x (5) 以上线性规划问题中,具有: 1)全部变量非负;2)全部约束条件都是等式;5 3)右端常数都是正的。

第三章 单纯形法在线性规划的计算求解中,应用最多且最著名的就是单纯形法。
这种方法是美国运筹学家G .B.Dantzig 丹捷格在1947年提出的。
后来经过人们多次改进,形成了许多变种。
实践证明单纯形法是一种使用方便、行之有效的算法。
§3.1 单纯形法的原理基本可行解的存在定理已经表明,若线性规划有最优解,则一定存在最优基本可行解,因此求线性规划问题就归结为寻找最优基本可行解。
单纯形法的基本思想就是从一个基本可行解出发,检查该基本可行解是否为最优解;若不是,则再设法求另一个未检查过的基本可行解,如此继续,直到查询到最优解为止。
按照以上的思路,需要解决三个难题: 1、 如何求出第一个基本可行解?2、 如何判断这个基本可行解就是最优解?3、 若不是最优解,如何从一个基本可行解过渡到另一个未检查过的基本可行解? 第一个问题的彻底解决尚需留待今后,但是我们知道,求基本可行解就是解线性方程组=A x B ,由于且()r m =A ,故可以解出m 个变量,称之为基本变量,剩下的n-m 个变量称之为自由变量。
于是,最简单的方法就是令所有的自由变量的值为零相应得到的解就是基本解。
例3.1 考虑线性规划1234134123m in 324..246350,1,2,3,4j z x x x x s t x x x x x x x j =-++-+=-++=≥= (3.1)把约束方程写成表格的形式,如表3-1:20 -4 1 6 -1 1 3 0 5从上述表格的左端可以看出,由第二、四列构成一个单位子矩阵,或曰子块,即对角元为1,其余为0,因此把2x 和4x 解出,即把2x 和4x 作为基本变量,余下1x 和3x 作为自由变量。
41321362453x x x x x x =-+=+- (3.2)令所有的自由变量130x x ==,而426,5x x ==,从而得到一个基本解(0,5,0,6)T 。
若需要判断该基本解是否基本可行解?只需看左端有单位子矩阵时,右列的元素是否都是非负,若是,则为基本可行解。