单 纯 形 法
- 格式:ppt
- 大小:388.01 KB
- 文档页数:3
运筹学单纯形法
运筹学单纯形法,又称单纯性法,是一种用于求解线性规划问题的数学方法,它在运筹学中发挥着重要作用。
它主要应用于决策及资源分配问题,可以帮助决策者更好地把握资源的优化配置,并寻求最优解。
单纯性法是以线性规划问题作为理论基础,它是将该问题转化为一系列形如Ax=b的线性方程组的运筹学方法。
在这个方程组通过调整方程中的系数和右面常数而变换为形如Cx≤d的不等式形式,而这种不等式系统称为单纯性约束条件。
单纯性法从不等式中寻找一系列基向量,并通过改变基向量来实现改变不等式的求解方程之间的关系,从而求出最优解的问题。
传统的单纯性法分为有界单纯性和无界单纯性两种情形。
无界单纯性以简单费用曲线方法、扩展的简单费用曲线方法和增广次数法三大类。
有界单纯性主要是对对角单纯性和非对角单纯性这两类单纯性系统分别使用不同的方法进行求解。
单纯性求解方法在线性规划问题求解中具有重要应用,它能通过求解线性规划问题中的一系列互不相关的子问题来求出最优解。
使用该方法,可以以最少的成本达到最优的收益,它包括费用最低优化、网络流优化、全格研究和数学优化模型等。

单纯形法原理及例题
单纯形法原理:
单纯形法是求解线性规划问题的一种数学方法,它是由美国数学家卢克·单纯形于1947年发明的。
用单纯形法求解线性规划的过程,往往利用线性规划的对偶形式,将原问题变换为无约束极大化问题,逐步把极大化问题转换为标准型问题,最后利用单纯形法的搜索方法求解满足所有约束条件的最优解。
例题:
问题:求解最小化目标函数z=2x1+x2的线性规划问题,约束条件如下:
x1+2x2≥3
3x1+x2≥6
x1,x2≥0
解:将上述线性规划问题转换为无约束极大化问题,可得:
极大化问题:
Max z=-2x1-x2
s.t. x1+2x2≤3
3x1+x2≤6
x1,x2≥0
将极大化问题转换为标准型问题,可得:
Max z=-2x1-x2
s.t. x1+2x2+s1=3
3x1+x2+s2=6
x1,x2,s1,s2≥0
运用单纯形法的搜索方法求解:
令x1=0,x2=0,则可得s1=3,s2=6,即(0,0,3,6)是单纯形的初始解;
令z=-2x1-x2=0,代入约束条件,可得x1=3,x2=3,则可得s1=0,s2=0,即(3,3,0,0)是新的单纯形解。
由于s1=s2=0,说明x1=3,x2=3是线性规划问题的最优解,且最小值为z=2*3+3=9。
单纯形法解的四种情况单纯形法是运筹学中求解线性规划问题的一种常用方法。
它的基本思想是利用线性规划问题的几何性质,通过不断优化目标函数值,使得问题的最优解逐渐逼近。
在运用单纯形法求解线性规划问题时,存在四种不同的情况,下面一一进行详细介绍。
一、唯一最优解当线性规划问题满足严格的可行性条件和凸性条件时,求解出的最优解就是唯一的。
在这种情况下,单纯形法通过一系列计算步骤,得出的就是该问题的最优解。
此时,算法的收敛速度也是最快的,因为每次迭代都会使得目标函数值有所改善,确定下一次迭代的方向也较为明确。
二、无解当线性规划问题没有可行解时,单纯形法会失败。
这通常是因为约束条件之间存在冲突,导致问题无法求解。
例如,如果一个约束条件要求变量的值大于等于某个数,而另一个约束条件要求该变量的值小于该数,那么就会导致问题无法求解。
这种情况下,单纯形法会一直进行迭代,直到达到指定的迭代次数或者发现无法得到更好的解为止。
三、无界当线性规划问题的目标函数可以无限地取得更小的值时,就被称为无界问题。
这种情况通常是由于约束条件中某个变量的值可以无限大或者无限小,导致目标函数的值可以无限地下降。
在这种情况下,单纯形法会一直迭代下去,但却无法得到最优解。
此时,需要对约束条件进行适当的调整,添加额外的限制条件以消除无界情况。
四、多解当线性规划问题可以有多个最优解时,就称为多解问题。
例如,当目标函数有多个极小值点,每个极小值点都是最优解。
在这种情况下,单纯形法只能找到其中一个最优解,而无法确定其他最优解的位置。
在实际应用中,多解问题较为常见,在解决此类问题时,需要进一步确定目标函数的相关参数,以便正确地找到所有的最优解。
综上所述,单纯形法在求解线性规划问题时,会出现四种不同的情况,即唯一最优解、无解、无界和多解。
对于每种不同的情况,需要采取不同的策略来进行处理。
因此,在运用单纯形法求解线性规划问题时,需要对这些情况进行充分的考虑,以便正确地解决问题。
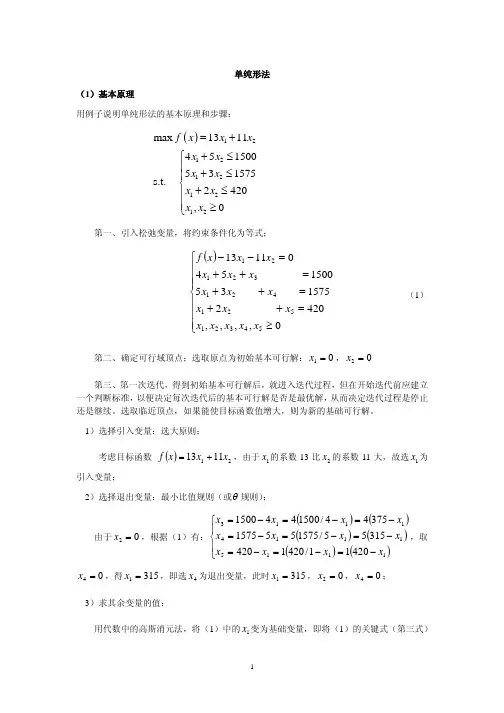
单纯形法求解原理过程第一篇:单纯形法求解原理过程单纯形法需要解决的问题:如何确定初始基本可行解;如何由一个基本可行解迭代出另一个基本可行解,同时使目标函数获得较大的下降;如何判断一个基本可行解是否为最优解。
min f(X)=-60x1-120x2 s.t.9x1+4x2+x3=360 3x1+10x2+x4=300 4x1+5x2+x5=200 xi≥0(i=1,2,3,4,5)(1)初始基本可行解的求法。
当用添加松弛变量的方法把不等式约束换成等式约束时,我们往往会发现这些松弛变量就可以作为初始基本可行解中的一部分基本变量。
例如:x1-x2+x3≤5 x1+2x2+x3≤10xi≥0 引入松弛变量x4,x5后,可将前两个不等式约束换成标准形式 x1-x2+x3+x4=5 x1+2x2+x3+x5=10xi≥0(i=1,2,3,4,5)令x1=x2=x3=0,则可立即得到一组基本可行解x1=x2=x3=0,x4=5,x5=10 同理在该实例中,从约束方程式的系数矩阵⎡94100⎤⎥A=[P1,P2,P3,P4,P5]=⎢310010⎢⎥⎢⎣45001⎥⎦中可以看出其中有个标准基,即⎡100⎤⎥B=⎢010⎢⎥⎢⎣001⎥⎦与B对应的变量x3,x4,x5为基本变量,所以可将约束方程写成X3=360-9x1-4x2 x4=300-3x1-10x2 x5=200-4x1-5x20 若令非基变量x1=x2=0,则可得到一个初始基本可行解X0 TX=[0,0,360,300,200]判别初始基本可行解是否是最优解。
此时可将上式代入到目标函数中,得: F(X)=-60x1-120x20对应的函数值为f(X)=0。
0由于上式中x1,x2系数为负,因而f(X)=0不是最小值。
因此所得的解不是最优解。
011(2)从初始基本可行解X迭代出另一个基本可行解X,并判断X 是否为最优解。
从一个基本可行解迭代出另一个基本可行解可分为两步进行:第一步,从原来的非基变量中选一个(称为进基变量)使其成为基本变量;第二步,从原来的基本变量中选一个(称为离基变量)使其成为新的非基变量。
第三章 单纯形法在线性规划的计算求解中,应用最多且最著名的就是单纯形法。
这种方法是美国运筹学家G .B.Dantzig 丹捷格在1947年提出的。
后来经过人们多次改进,形成了许多变种。
实践证明单纯形法是一种使用方便、行之有效的算法。
§3.1 单纯形法的原理基本可行解的存在定理已经表明,若线性规划有最优解,则一定存在最优基本可行解,因此求线性规划问题就归结为寻找最优基本可行解。
单纯形法的基本思想就是从一个基本可行解出发,检查该基本可行解是否为最优解;若不是,则再设法求另一个未检查过的基本可行解,如此继续,直到查询到最优解为止。
按照以上的思路,需要解决三个难题: 1、 如何求出第一个基本可行解?2、 如何判断这个基本可行解就是最优解?3、 若不是最优解,如何从一个基本可行解过渡到另一个未检查过的基本可行解? 第一个问题的彻底解决尚需留待今后,但是我们知道,求基本可行解就是解线性方程组=A x B ,由于且()r m =A ,故可以解出m 个变量,称之为基本变量,剩下的n-m 个变量称之为自由变量。
于是,最简单的方法就是令所有的自由变量的值为零相应得到的解就是基本解。
例3.1 考虑线性规划1234134123m in 324..246350,1,2,3,4j z x x x x s t x x x x x x x j =-++-+=-++=≥= (3.1)把约束方程写成表格的形式,如表3-1:20 -4 1 6 -1 1 3 0 5从上述表格的左端可以看出,由第二、四列构成一个单位子矩阵,或曰子块,即对角元为1,其余为0,因此把2x 和4x 解出,即把2x 和4x 作为基本变量,余下1x 和3x 作为自由变量。
41321362453x x x x x x =-+=+- (3.2)令所有的自由变量130x x ==,而426,5x x ==,从而得到一个基本解(0,5,0,6)T 。
若需要判断该基本解是否基本可行解?只需看左端有单位子矩阵时,右列的元素是否都是非负,若是,则为基本可行解。