L298L297驱动板资料说明
- 格式:pdf
- 大小:629.02 KB
- 文档页数:2

L298N 电机驱动器使用说明书[温馨提示温馨提示]]在使用本产品前,请仔细阅读本使用说明书,这样您在使用中遇到问题时,也许可以通过本说明书就能解决;请妥善保管本说明书,以备日后参考;本册外观图片仅供参考,请以实物为准。
[注意事项注意事项]]本产品为直流电源供电,请确认电源正负极正确后上电; 请勿带电插拔连接线缆;此产品非密封,请勿在内部混入镙丝、金属屑等导电性异物; 储存和使用时请注意防潮防湿;第一次上电时观察绿色电源指示灯是否点亮,如果不亮,请立即断电和我们联系,或检查电源是否接反。
板上有个5V 备用输出插备用输出插针针J4J4,,只是输出给单片机等系统板使用,千万不能从这里引入外部电源千万不能从这里引入外部电源,,否则可能烧坏否则可能烧坏驱动板驱动板驱动板稳压稳压芯片78M05。
您需要的话可以自己焊接您需要的话可以自己焊接,,默认不焊接默认不焊接。
驱动器为功率设备,请保持工作环境的散热通风;在连上电机后使其连续工作一段时间后观察电机和驱动芯片的温升正常后方可进行后续使用,如果电机或驱动芯片(L298N)温度过高请和我们联系。
[主要主要功能特点功能特点功能特点]]关键芯片:L298N 双H 桥直流/步进电机驱动芯片L298N 芯片工作电压:DC 4.5~5.5V 。
电机驱动电源电压DC 6--35V 。
电源输入正常时有LED 灯指示。
最大输出电流2A (瞬间峰值电流3A ),最大输出功率25W 。
输入控制有光耦隔离,抗干扰能力强。
输出正常时电机运转有LED 灯指示。
具有二极管续流保护。
可单独控制2台直流电机或1台两相4线(或6线)步进电机。
可以采用并联接法控制一台高达3A 的直流电机。
可实现电机正反转。
直流电机转速可通过PWM 方式实现调速。
可以输出5V 电源。
[控制接口说明控制接口说明]]本驱动器控制接口采用光耦共阳极接法实现隔离功能,因此在驱动器上不需要连接控制端的地,控制时是通过控制端的地形成回路的,也避免了控制地和驱动地共地造成电机启动对控制的干扰;只要把控制端的电源正(一般有+3.3V 、+5V 、+12V 、+24V 等等)接在驱动器端口J2的VCC 上即可。

网易新闻微博邮箱闪电邮相册有道手机邮印像派梦幻人生更多博客博客首页博客话题热点专题博客油菜地找朋友博客圈子博客风格手机博客短信写博邮件写博博客复制摄影摄影展区每日专题窗体顶端年12月17日STC89C51单片机,L297和L298N驱动电路及步进电机的基本原理与功能默认分类2008-12-11 14:43:53 阅读8201 评论6 字号:大中小订阅摘要:本设计首先介绍了STC89C51单片机,L297和L298N驱动电路及步进电机的基本原理与功能;其次,设计步进电机实现起停、转向、速度、位置变化的控制方案;再次,在这些器件功能与特点的基础上,拟出设计思路,构建系统的总体框架;最后利用PROTEL软件绘出电路图,同时写出设计系统的运行流程和相关程序。
整个系统通过写入单片机中的程序分配好控制字的存储单元以及相应的内存地址赋值;启动系统后,从单片机的I/O口输出控制脉冲,经过L297、L298N驱动电路对脉冲进行处理,输出能直接控制步进电机的脉冲信号。
在此基础上,重新分配I/O资源,同时增加驱动芯片L297、L298N的个数,在负载能力范围允许内,就能实现多台步进电机独立起停、转向、速度、位置变化的控制。
关键字:STC89C51单片机;L297; L298N; 步进电机前言步进电机是一种将电脉冲信号转换成相应角位移的控制电机。
目前,数字技术、计算机技术和永磁材料的迅速发展,推动了步进电机的发展。
本设计针对目前各个领域对自动化的需要,采用STC89C51单片机与L297,L298N驱动芯片驱动多台步进电机同时独立工作,将它应用于各种复杂的控制领域,能使许多半自动控制的系统完全成为真正的全自动,特别是用在机器人等领域,能极大的提高生产力和降低劳动强度。
由于步进电机具有快速启动、精确步进和定位等特点,因而在数控机床,绘图仪,打印机以及光学仪器中得到广泛的应用。
STC89C51单片机的特点STC89C51系列单片机是宏晶科技推出的新一代超强抗干扰/高速/低功耗的单片机,是MCS-51系列单片机的派生产品;它们在指令系统中、硬件系统和片内资源与标准的8052单片机完全兼容,DIP-40封装系列与8051为pin-to-pin兼容,指令代码是与8051完全兼容的单片机。

L297的特性是只需要时钟、方向和模式输入信号。
相位是由内部产生的。
因此可以减轻单片机和程序设计的负担。
L298是一种高压、大电流双H桥式驱动器。
L297和L298组成的步进电机控制电路具有以下特点:使用元件少,可靠高体积小,软件开发简单,硬件的费用大大减少。
由L298和光电耦合器TLP521-4构成的直流电机驱动器具有以下特点:软件开发简单,硬件电路少,驱动能力强。
多功能直流/步进电机驱动器可以方便的用短路帽来切换是作为步进电机。
L297/L298直流/步进电机驱动器说明:
1.尺寸:长、宽、高:79*43*33mm.
2.主要芯片:L297、L298.
3.工作电压:控制信号电压直流
4.5V-
5.5V。
电机电压直流5V-30V.
4.最大工作电流:2A。
5.额定功率:25W.
6.具有电源指示.
7.具有信号和转向指示.
8.可单独控制一台双极性两相步进电机或四相单极性步进电机
9.可单独控制两台直流电机。
L297 L298 直流/步进两用电机驱动器:
作为直流电机时的接线图:
作为步进电机时接线说明:
电路原理图:直流电机驱动器
步进电机驱动器。

【简要说明】一、尺寸:长71mmX宽43mmX高28mm二、主要芯片:L297、L298N三、工作电压:控制信号直流4.5~5.5V;电机电压直流5V~30V四、最大工作电流:2A五、额定功率25W六、特点:1、具有电源指示。
2、转速可调3、抗干扰能力强4、具有续流保护和过电流保护5、可单独控制一台步进电机6、可控制两相和四相步进电机7、可控制直径在42mm内的任何,两相和四相步进电机适用场合:单片机学习、电子竞赛、产品开发、毕业设计。
【标注图片】【步进电机控制接线图】步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源)三、控制步进电机的速度如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。
两个脉冲的间隔越短,步进电机就转得越快。
调整单片机发出的脉冲频率,就可以对步进电机进行调速。
(注意:如果脉冲频率的速度大于了电机的反应速度,那么步进电机将会出现失步现象)。
四、此板驱动步进电机测试程序说明:以AT89S52单片机控制单元,C语言编程!【接线图】【测试程序】/********************************************************************汇诚科技实现功能:正转_反转_减速_加速程序使用芯片:AT89S52 或者STC89C52晶振:11.0592MHZ编译环境:Keil作者:zhangxinchun淘宝店:汇诚科技【声明】此程序仅用于学习与参考,引用请注明和作者信息!*********************************************************************/ #include<reg52.h>#define uchar unsigned char#define uint unsigned intuchar Y=1; //初始化速度/********************************************************控制位定义********************************************************/sbit shi_neng=P1^0; // 使能控制位sbit fang_shi=P1^1; // 工作方式控制位sbit fang_xiang=P1^2;// 旋转方向控制位sbit mai_chong=P1^3; // 脉冲控制位sbit zheng_zhuan=P2^0; // 正转sbit fan_zhuan=P2^1; // 反转sbit jia_su=P2^2; // 加速sbit jian_su=P2^3; // 减速/********************************************************延时函数********************************************************/ void delay(uchar i)//延时函数{uchar j,k;for(j=0;j<i;j++)for(k=0;k<180;k++);}/********************************************************加速函数********************************************************/ void jia(){Y=Y-1;if(Y<=1){Y=1;}//如果速度值小于等于1,值保持不变}/********************************************************减速函数********************************************************/ void jian(){Y=Y+1;if(Y>=100){Y=100;}}/********************************************************主函数********************************************************/main(){shi_neng=1; // 使能控制位fang_shi=1; // 工作方式控制位fang_xiang=1;// 旋转方向控制位mai_chong=1; // 脉冲控制位while(1){if(zheng_zhuan==0){fang_xiang=1;}if(fan_zhuan==0){fang_xiang=0;}if(jia_su==0){delay(10);while(!jia_su);jia();}if(jian_su==0){delay(10);while(!jian_su);jian();}mai_chong=~mai_chong; //输出时钟脉冲delay(Y); //延时(括号内数值越小,电机转动速度越快)}}/********************************************************结束********************************************************/【应用原理图】L297_L298芯片混合式步进电机驱动器元件清单序号名称标注名型号封装备注1 电阻R1、R3 1K 贴片0805封装2 电阻R2 3.9K 贴片0805封装3 电阻R4、R5 0.5欧姆直插2W4 电阻R6 22K 贴片0805封装5 电容C1 25V0.22uf 直插电容6 电阻C2 50V100UF 电解电容7 发个二极管DS1 红色二极管区分正负极8 整流二极管D1~D8 IN40079 芯片U1 L297 20P直插10 芯片U2 L29811 排针P1 6针12 端子6针【图片展示】/********************************************************实现功能:正转程序使用芯片:AT89S52晶振:11.0592MHZ编译环境:Keil********************************************************/#include<reg52.h> //库文件#define uchar unsigned char //字符型宏定义#define uint unsigned int //整型宏定义uchar tt; //定时器计数初值定义uint sec; //速度值定义uchar Y=30; //初始化速度/********************************************************控制位定义********************************************************/sbit shi_neng=P1^0; // 使能控制位sbit fang_shi=P1^1; // 工作方式控制位sbit fang_xiang=P1^2;// 旋转方向控制位sbit mai_chong=P1^3; // 脉冲控制位sbit zheng_zhuan=P2^0; // 正转sbit fan_zhuan=P2^1; // 反转sbit jia_su=P2^2; // 加速sbit jian_su=P2^3; // 减速/********************************************************************延时函数*********************************************************************/ void delay(uchar t){uchar i,j;for(i=0;i<t;i++){for(j=13;j>0;j--);{ ;}}}/********************************************************************定时中断服务函数*********************************************************************/ void t0(void) interrupt 1 using 0 //定时中断服务函数{tt++; //每过250ust tt 加一if(tt==1) //当tt满足条件时{tt=0; //计满重新再计sec++;if(sec==Y) //括号内数值越小,电机转动速度越快{sec=0; //计满重新再计mai_chong=~mai_chong; //脉冲输出}}}/********************************************************初始化********************************************************/ void init(){TMOD=0x02; //定时器工作在方式2ET0=1;EA=1;TH0=0xFF; //对TH0 TL0 赋值TL0=0xFE;TR0=1; //开始定时sec=0;mai_chong=1; // 脉冲控制位}/********************************************************加速函数********************************************************/ void jia(){Y=Y-2;if(Y<=1){Y=2;}//如果速度值小于等于1,值保持不变}/********************************************************减速函数********************************************************/ void jian(){Y=Y+2;if(Y>=100){Y=100;}}/********************************************************主函数********************************************************/main(){init(); //程序初始化shi_neng=0; // 使能控制位fang_shi=1; // 工作方式控制fang_xiang=1;// 控制方向为正转while(1){if(zheng_zhuan==0){delay(100);shi_neng=1;fang_xiang=0;}if(fan_zhuan==0){delay(100);shi_neng=1;fang_xiang=1;}if(jia_su==0){delay(10);while(!jia_su);jia();}if(jian_su==0){delay(10);while(!jian_su);jian();}}}/********************************************************结束********************************************************/keil参考程序正转_反转_加速_减速_高速#include<reg52.h>#define uchar unsigned char#define uint unsigned intuchar Y=1; //初始化速度/********************************************************控制位定义********************************************************/sbit shi_neng=P1^0; // 使能控制位sbit fang_shi=P1^1; // 工作方式控制位sbit fang_xiang=P1^2;// 旋转方向控制位sbit mai_chong=P1^3; // 脉冲控制位sbit zheng_zhuan=P2^0; // 正转sbit fan_zhuan=P2^1; // 反转sbit jia_su=P2^2; // 加速sbit jian_su=P2^3; // 减速/********************************************************延时函数********************************************************/void delay(uchar i)//延时函数{uchar j,k;for(j=0;j<i;j++)for(k=0;k<180;k++);}/********************************************************加速函数********************************************************/ void jia(){Y=Y-1;if(Y<=1){Y=1;}//如果速度值小于等于1,值保持不变}/********************************************************减速函数********************************************************/ void jian(){Y=Y+1;if(Y>=100){Y=100;}}/********************************************************主函数********************************************************/main(){shi_neng=1; // 使能控制位fang_shi=1; // 工作方式控制位fang_xiang=1;// 旋转方向控制位mai_chong=1; // 脉冲控制位while(1){if(zheng_zhuan==0){fang_xiang=1;}if(fan_zhuan==0){fang_xiang=0;}if(jia_su==0){delay(10);while(!jia_su);jia();}if(jian_su==0){delay(10);while(!jian_su);jian();}mai_chong=~mai_chong; //输出时钟脉冲delay(Y); //延时(括号内数值越小,电机转动速度越快)}}AVR系列单片机控制参考程序#include <iom16v.h>#include <macros.h>/**********************************************************************函数数据类型说明**********************************************************************/ #define uchar unsigned char#define uint unsigned int/**********************************************************************延时函数**********************************************************************/ void delay(uint MS){uint i,j;for( i=0;i<MS;i++)for(j=0;j<80;j++); //1141是在8MHz晶振下,通过软件仿真反复实验得到的数值}/**********************************************************************主函数**********************************************************************/ void main(){ uint i;i=10;//改变变量i 的大小可以改变速度,i越大速度越慢DDRB=0XFF;//PORTC=0XFF;PORTB|=BIT(0);//00000001 使能控制开PORTB|=BIT(1);//00000010 四拍工作方式PORTB|=BIT(2);//00000100 正方向旋转while(1){PORTB|=BIT(3);//00001000 脉冲输出delay(i);PORTB&=~BIT(3);delay(i);}}/**********************************************************************结束**********************************************************************/。
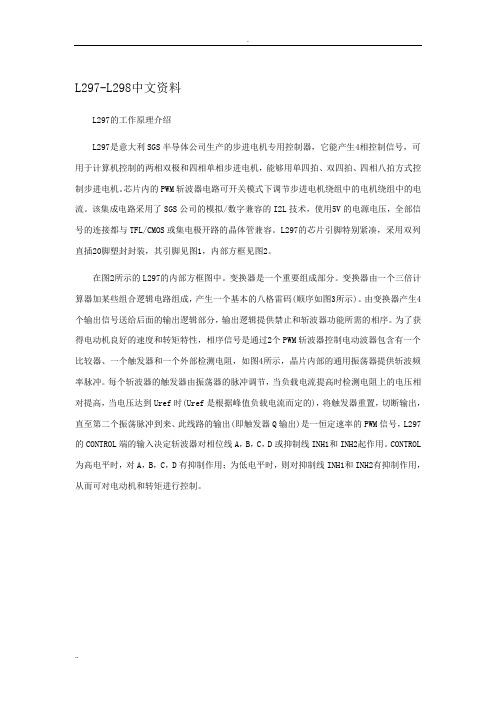
L297-L298中文资料L297的工作原理介绍L297是意大利SGS半导体公司生产的步进电机专用控制器,它能产生4相控制信号,可用于计算机控制的两相双极和四相单相步进电机,能够用单四拍、双四拍、四相八拍方式控制步进电机。
芯片内的PWM斩波器电路可开关模式下调节步进电机绕组中的电机绕组中的电流。
该集成电路采用了SGS公司的模拟/数字兼容的I2L技术,使用5V的电源电压,全部信号的连接都与TFL/CMOS或集电极开路的晶体管兼容。
L297的芯片引脚特别紧凑,采用双列直插20脚塑封封装,其引脚见图1,内部方框见图2。
在图2所示的L297的内部方框图中。
变换器是一个重要组成部分。
变换器由一个三倍计算器加某些组合逻辑电路组成,产生一个基本的八格雷码(顺序如图3所示)。
由变换器产生4个输出信号送给后面的输出逻辑部分,输出逻辑提供禁止和斩波器功能所需的相序。
为了获得电动机良好的速度和转矩特性,相序信号是通过2个PWM斩波器控制电动波器包含有一个比较器、一个触发器和一个外部检测电阻,如图4所示,晶片内部的通用振荡器提供斩波频率脉冲。
每个斩波器的触发器由振荡器的脉冲调节,当负载电流提高时检测电阻上的电压相对提高,当电压达到Uref时(Uref是根据峰值负载电流而定的),将触发器重置,切断输出,直至第二个振荡脉冲到来、此线路的输出(即触发器Q输出)是一恒定速率的PWM信号,L297的CONTROL端的输入决定斩波器对相位线A,B,C,D或抑制线INH1和INH2起作用。
CONTROL 为高电平时,对A,B,C,D有抑制作用;为低电平时,则对抑制线INH1和INH2有抑制作用,从而可对电动机和转矩进行控制。
图1 L297引脚图图2 L297内部方框电路图图3 L297变换器换出的八步雷格码(顺时针旋转)图4 斩波器线路图5 多个L297同步工作连接图L297 ABSOLUTE MAXIMUM RATINGS绝对最大额定值:SymbolParameter 参数Value 数值Unit 单位符号Vs Supply voltage 电源电压10 VVi Input signals 输入信号7 VPtot Total power dissipation 总功率耗散(Tamb = 70℃) 1 WTstg, Tj Storage and junction temperature 储存和结温-40 to + 150 ℃L297 ELECTRICAL CHARACTERISTICS (Refer to the block diagram Tamb = 25℃, Vs = 5V unless otherwisespecified) L297 电气特性:Symbol符号Parameter 参数Test conditions测试条件最小典型最大单位Vs Supply voltage (pin 12) 电源电压 4.75 7 VIsQuiescent supply current静态电源电流(引脚12) Outputs floating580 mAViInput voltage输入电压(引脚11,17,18,19,20) Low0.6V High 2 Vs VIiInput current输入电流(引脚11,17,18,19,20) Vi = L1μA Vi = H 10μAVenEnable input voltage 使能输入电压(引脚10)Low1.3V High 2 Vs VIenEnable input current使能输入电流(引脚10) Ven = L10μA Ven = H 10μAVoPhase output voltage 相输出电压(引脚4,6,7,9)Io = 10mA VOL0.4V Io =5mA VOH 3.9 VVinhInhibit output voltage (pins 5, 8)抑制输出电压(引脚5,8)Io = 10mA Vinh L0.4VIo =5mA Vinh H 3.9 V VSYNC Sync Output Voltage 同步输出电压Io = 5mA VSYNC H 3.3 VIo = 5mA VSYNC V0.8IleakLeakage current(pin3)泄漏电流(引脚3) VCE = 7 V 1μAVsat Saturation voltage饱和电压(引脚3) I = 5 mA0.4V VoffComparators offset voltage比较器的偏移电压(引脚13,14,15)Vref = 1 V 5 mV IoComparator bias current 比较器偏置电流(引脚13,14,15)-100 10 mA VrefInput reference voltage输入参考电压(引脚15)0 3 V tCLK Clock time 时钟时间0.5μs tS Set up time 建立时间 1μs tH Hold time保持时间 4μs tR Reset time复位时间 1μs tRCLK Reset to clock delay 重置时钟延迟 1μsL297各引脚功能说明1脚(SYNG)——斩波器输出端。

L297+L298步进电机驱动控制板说明书一、板子跳线器说明:所有跳线都在左边,则由单片机控制。
1、靠近光偶的短路冒打在CLK-555方向时有板上的555提供时钟给驱动器;打在CLK-CP U时右用户CPU提供时钟给驱动器。
2、JT5打在右边:297的HALF/FULL(全速/半速)脚接GND了默认为FULL模式了;JT5打在左边:297的HALF/FULL脚空了电机模式用户自己控制。
3、JT6打在右边:297的CW/CCW脚(方向)接GND了默认为顺时针转动模式了;JT6打在左边:297的CW/CCW脚空了电机正反转模式用户自己控制。
二、按键说明:板子使用全新的L297作为控制芯片 L298作为驱动芯片板载NE555时钟电路为L297提供CLK因此该版在不需要外部控制的情况下就可以工作板载3个控制按键EN - 使能CW - 反向旋转HF - 半速旋转通过按键就可以直接控制电机的正反转、全速/半速和使能。
三、基本功能描述:通过光藕隔离之后将CLK CW HF EN四个基本控制端引出单片机等可以非常方便的控制电路的工作这个板子改进的地方比较多也方便研究使用。
板子使用1N5822快速二极管作为续流器件其速度要远远快于整流桥的 L298和电机能够提供更完善的有效的保护。
模块供电+ 5V(L297和L298控制供电) +12V(根据电机最低4V最高16V)给电机供电。
电机输出接口包括: +12V 四相输出 GND(请根据您的电机连接)。
控制输入接口包括: GND CLK EN CW HF。
EN:高电平停止,低电平使能。
RET:高电平停止,低电平使能。
C/CW:高电平逆时针,低电平顺时针。
H/HD:高电平全速,低电平半速。
CLK:时钟脉冲。
需要特别说明的是:为了测试方便在板子上设置了NE555构成的一个低频时钟源(使用时跳线冒打在CLK-555处),当您使用外部的时钟信号控制电机的转速时必须跳线冒打在CLK -CPU处否则外部时钟是不会传到L297里面。
基于L297+L298步进电机驱动与控制采用L297+L298构成的步进电机驱动如图5.5.3所示。
PCB图如图5.5.14所示。
L298N可以驱动直流电机和两个二相电机,也可以驱动一个四相电机,可直接通过电源来调节输出电压。
最大输入电流DC 2A,最高输入电压为DC 50V。
最大输出功率25W。
L297译码器能将控制器的控制信号译成所需的相序,再将产生的四相A、B、C、D或抑制线INH1和INH2输入到L298N进行功率放大。
(1)隔离电路设计一般步进电机转速不超过1000r/s,查询资料可得TLP521响应10μs。
计算公式如下:f =v=则选用TL521系列即可达到设计要求,如需提高电机转速,则只需将CLK端的光耦更换为高速光耦。
图中R7~R11为限流电阻,阻值为1K。
光耦的引脚端2、4、6、8、10分别接微控制器的4个I/O 12。
光耦的引脚端20、18、16、14、12与L297连接;当控制I/O口输出低电平时,光耦内部发光二极管导通发光,使光敏三极管导通从而使光耦的引脚端19、17、15、13、11输出低电平,这样就通过光耦将控制器与驱动电路相隔离,起到了保护微控制器的作用。
(2)驱动电路设计步进电机驱动电路采用L297+L298N构成。
L297的基准电压端V REF输入电压的大小控制步进电机输入电流,为保证步进电机最大的额定电流1.5A,如果选择V REF为1V,则要求R12~R15选用10/2W 的电阻。
L297的引脚端功能如下:引脚端10(使能端EN)为芯片的片选信号,高电平有效;引脚端20(复位RST),低电平有效;引脚端19(HALF/FULL)和引脚端17(CW/CCW)都通过上拉电阻链接到高电平;引脚端18(时钟输入CLK)的最大输入时钟频率不能超过5KHz,控制时钟的频率,即可控制电机转动速率;引脚端19(HALF/FULL)决定电机的转动方式,HALF/FULL=0,电机按整步方式运转;HALF/FULL=1,电机按半步方式运转;引脚端17(CW/CCW)控制电机转动方向;CW/CCW=1,电机顺时针旋转;CW/CCW=0,电机逆时针旋转。
L298双H桥直流电机驱动板指导手册V0.1一、产品参数:1、驱动芯片:L298N双H桥直流电机驱动芯片2、驱动部分端子供电范围Vs:+5V~+35V ;如需要板内取电,则供电范围Vs:+7V~+35V3.驱动部分峰值电流Io:2A4.逻辑部分端子供电范围Vss:+5V~+7V(可板内取电+5V)5.逻辑部分工作电流范围:0~36mA6.控制信号输入电压范围:低电平:-0.3V≤Vin≤1.5V高电平:2.3V≤Vin≤Vss7.使能信号输入电压范围:低电平:-0.3≤Vin≤1.5V(控制信号无效)高电平:2.3V≤Vin≤Vss(控制信号有效)8.最大功耗:20W(温度T=75℃时)9.存储温度:-25℃~+130℃10.驱动板尺寸:55mm*49mm*33mm(带固定铜柱和散热片高度)11.驱动板重量:33g12.其他扩展:控制方向指示灯、逻辑部分板内取电接口。
二、电路原理图三、使用说明:1、直流电机的驱动:// 硬件连接:P1.0----IN1// P1.1----IN2// P1.2----ENA// 直流电机两端分别接OUT1和OUT2,// 电机驱动电压根据所接电机而定,驱动板芯片逻辑电压为+5V// 维护记录:2012.2.8 双龙电子科技//*****************************************************************// #include<reg52.h>sbit IN1=P1^0;sbit IN2=P1^1;sbit ENA=P1^2;void delay(unsigned int z);void delay_us(unsigned int aa);/*******************主函数**************************/void main(){while(1){unsigned int i,cycle=0,T=2048;IN1=1; //正转IN2=0;for(i=0;i<200;i++){delay(10);//PWM占空比为50%,修改延时调整PWM脉冲ENA=~ENA;}IN1=0; //反转IN2=1;for(i=0;i<100;i++){delay(20);//PWM占空比为50%,修改延时调整PWM脉冲ENA=~ENA;}IN1=1; //自动加速正转IN2=0;while(cycle!=T){ ENA=1;delay_us(cycle++);ENA=0;delay_us(T-cycle);}IN1=0; //自动减速反转IN2=1;while(cycle!=T)该步进电机为四相步进电机,采用单极性直流电源供电。
NS-CNC步进电机驱动器NS-CNC步进电机驱动器,其步进电机驱动电路是经典的L297+L298集成块组合电路,X/Y/Z 3路驱动与微处理器连机控制。
双极性驱动二相永磁步进电机及二相(四相)混合式步进电机电路板尺寸:10.8*7.3CM实物:11*8.1*6.3CMNS-CNC步进电机驱动器技术参数:使用环境及参数:电源电压:驱动部分:本驱动器可适应较宽电压范围用户可根据自己的情况在10V-36V之间选择。
一般来说较高的额定电压有利于提高步进电机在高转速扭矩,但却会加大驱动板的功率损耗和温升。
前置部分:可在9-12V之间选择(推荐9V)。
前置部分约消耗0.25A电流,在功率电源输入超过12V时不可将前置电源并接于功率电源,否则电路板上稳压IC发热严重)输出电流选择:本驱动器最大电流值为2A/相,为配合不同电机使用,调整精密可调电阻以达到最佳电流匹配。
输入信号:本驱动器并口输入信号使用共阴接线方式,+5VTTL电平驱动注:STEP时钟、DIRECTION正反转、ENABLE起动起动端:1脚对应Z路控制为负脉冲驱动。
14脚对应Y路控制为负脉冲驱动16脚对应X路控制,为正脉冲驱动。
方向端:3、5、7脚分别对应X、Y、Z控制时钟端:2、4、6脚分别对应X、Y、Z控制脉冲信号输入:该信号被驱动器解释为一个有效脉冲,并驱动电机运行一步,为确保脉冲信号可靠响应,脉冲电平持续时间不少于10uS,本驱动器最高信号响应频率为70KHz,过高的输入频率将可能得不到正确响应。
方向信号输入:该端信号的高低电平控制电机的两个转向,控制电机转向时应确保方向信号领先脉冲信号至少10uS建立,可避免驱动器对脉冲的错误响应。
精密可调电阻:分别设定Z、Y、X斩波线路参考电压决定步进电机峰值工作电流(顺时针为提高电流值)跳线说明:J1、J3、J5是CONTROL控制控制输入与规定斩波器动作,低电平斩波器控制INH1和INH2J2、J4、J6是HALF/FULL(半/全阶梯输入选择)高电平时选择半阶梯工作,低电平时选择全阶梯工作关于细分的说明:NS-CNC步进电机驱动板可以理解为2细分,即J2、J4、J6为高电平时的半阶梯状态L297与细分理论上不同之处是中间位置两相电流都与不细分相等(理想条件下应该是0.7倍左右),虽非实际意义上的细分,但是经验证L297在2细分(半阶梯)状态下运行效果还很不错。
直流&步进电机驱动说明书
模块简介:
本驱动采用L298+L297双芯片一体化设计,即可驱动两路直流电机又可驱动一路步进电机,并且加入了高速光耦芯片,有效保护单片机
接口说明:
直流电机控制输入输出关系图:
步进电机控制IO口说明:
EN:使能控制端
H/F:工作方式选择控制端
CW:方向选择控制端
CLK:时钟输入端
产品参数:
1.驱动芯片:L298N双H桥直流电机驱动芯片
2.带光耦驱动隔离功能,带正反转指示灯和电源指示灯
3.驱动部分端子供电范围Vs:+5V~+35V ;
4.驱动部分峰值电流Io:2A
5.逻辑部分端子供电范围Vss:+3.3V~+7V
6.逻辑部分工作电流范围:0~36mA
7.控制信号输入电压范围:
低电平:-0.3V≤Vin≤1.5V
高电平:2.3V≤Vin≤Vss
8.使能信号输入电压范围:
低电平:-0.3≤Vin≤1.5V(控制信号无效)
高电平:2.3V≤Vin≤Vss(控制信号有效)
9.最大功耗:20W(温度T=75℃时)
10.存储温度:-25℃~+130℃
11.驱动板尺寸:60mm*50mm*33mm(带固定铜柱和散热片高度)
12.驱动板重量:33g
13.关于调速:PWMA和PWMB输入不同的占空比就可以分别调制两个电机的速度,如果不需要调速,需要接到高电平;。