90系列伺服电机参数表
- 格式:xls
- 大小:22.50 KB
- 文档页数:1
LB系列机座号(mm):80、110、130、150额定转矩(Nm):1.3~27额定功率(Kw):0.4~5.5额定转速(rpm):1500、2000、2500、3000最高转速(rpm):/转子惯量:中惯量标配反馈元件:增量式编码器(2500C/T)失电制动器:可配适配驱动器工作电压(VAC):220LBB系列机座号(mm):80、110、130、150额定转矩(Nm):1.3~19.1额定功率(Kw):0.4~3.0额定转速(rpm):1500、2000、3000最高转速(rpm):3000、5000转子惯量:中惯量标配反馈元件:总线式光电编码器失电制动器:可配适配驱动器工作电压(VAC):220HB系列机座号(mm):110、130、150额定转矩(Nm):2~27额定功率(Kw):0.6~5.5额定转速(rpm):1500、2000、2500、3000最高转速(rpm):/转子惯量:中惯量标配反馈元件:增量式编码器(2500C/T)失电制动器:可配适配驱动器工作电压(VAC):380HBB系列机座号(mm):110、130、150额定转矩(Nm):2.4~28.7额定功率(Kw):0.4~5.5额定转速(rpm):1500、2000最高转速(rpm):3000转子惯量:中惯量标配反馈元件:总线式光电编码器失电制动器:可配适配驱动器工作电压(VAC):380请您关注以下伺服电机为自冷式散热方式,安装时请选择足够大的安装板。
伺服电机长期工作,机体本身会有一定的温度,这是正常情况。
装配了失电制动器的伺服电机,其失电制动器的电源必须由驱动器控制开闭,否则会造成工作状态不佳。
伺服电机内装精密反馈元件,严禁重力敲击电机轴伸端及后部。
请注意电机轴伸端的最大径、轴向力的限值。
严禁随意更改、拆装及加工电机部件。
请您将需求告之我们,我们来为您服务。
电机电联接器转矩转速曲线示意图LB 、HB系列 LBB 、HBB 系列LB、LBB 、HB 、HBB 系列伺服电机的Mmax=3Mn ;Mmax 输出状态为短时工作。

铭牌参数综述电动机铭牌数据及额定值型号 :表示电动机的系列品种、性能、防护结构形式、转子类型等产品代号。
功率 :表示额定运行时电动机轴上输出的额定机械功率,单位KW或HP,1HP=0.736KW 。
电压 :直接到定子绕组上的线电压(V),电机有Y形和△形两种接法,其接法应与电机铭牌规定的接法相符,以保证与额定电压相适应。
电流 :电动机在额定电压和额定频率下,并输出额定功率时定子绕组的三相线电流。
频率 :指电动机所接交流电源的频率,我国规定为50HZ±1。
转速 :电动机在额定电压、额定频率、额定负载下,电动机每分钟的转速(r/min);2极电机的同步转速为3000r/min 。
工作定额 :指电动机运行的持续时间 。
绝缘等级 :电动机绝缘材料的等级,决定电机的允许温升 。
标准编号 :表示设计电机的技术文件依据。
励磁电压 :指同步电机在额定工作时的励磁电压(V) 。
励磁电流 :指同步电机在额定工作时的励磁电流(A)。
特别提示 :一般电机铭牌上标明的是磁极数,在转速计算公式中是磁极对数,所以要除以2再代入公式计算交流异步电动机铭牌上主要标记以下数据,并解释其意义如下:(1)额定功率( P ):是电动机轴上的输出功率。
(2)额定电压:指绕组上所加线电压。
(3)额定电流:定子绕组线电流。
(4)额定转数( r/min ):额定负载下的转数。
(5)温升:指绝缘等级所耐受超过环境温度 。
(6)工作定额:即电动机允许的工作运行方式。
(7)绕组的接法:Δ或 Y 联结,与额定电压相对应。
1、型号:例如Y112M-4中“Y”表示Y系列鼠笼式异步电动机(YR表示绕线式异步电动机),“112”表示电机的中心高为112mm,“M”表示中机座(L表示长机座,S表示短机座),“4”表示4极电机。
有些电动机型号在机座代号后面还有一位数字,代表铁心号,如Y132S2-2型号中S后面的“2”表示2号铁心长(1为1号铁心长)。
2、额定功率:电动机在额定状态下运行时,其轴上所能输出的机械功率称为额定功率。


AC伺服驱动器EPS-EB系列应用技术手册(V1.5)安全注意事项本节就产品到货时的确认、保管、搬运、安装、接线、运行、检查、废弃等用户必须遵守的重要事项进行说明。
目录安全注意事项 (2)第一章产品概要 (8)1.1产品检查 (8)1.2产品型号 (9)1.2.1 铭牌说明 (9)1.2.2 型号说明 (10)1.2.3配线型号说明 (10)1.2.4基本参数 (11)1.3伺服驱动器各部分名称 (14)1.4维护和检查 (14)第二章安装 (15)2.1安装方向与空间 (15)2.2断路器与保险丝建议规格表 (16)2.3噪音干扰与高次谐波对策 (16)2.3.1安装噪音滤波器 (16)2.3.2高次谐波抑制用 AC 电抗器的连接 (17)第三章配线 (18)3.1系统结构和配线 (18)3.1.1 伺服系统结构 (18)3.1.2 驱动器的连接器与端子 (19)3.1.3 主回路的接线 (19)3.2连接器CN2的配线 (21)3.2.1 连接器CN2的排列(插座) (21)3.2.2 连接器CN2的信号说明 (22)3.2.3 IO信号的分配 (23)3.2.4与上位装置的连接示例 (26)3.3动力线的配线 (29)3.4连接器CN3的配线 (30)3.4.1连接器CN3端子排列 (30)3.4.2连接器CN3连接示例 (32)3.5标准接线方式 (34)3.5.1 位置控制的连接示例 (34)3.5.2 速度控制的连接示例 (35)3.5.3 转矩控制的连接示例 (36)第四章面板操作 (37)4.1面板操作器 (37)4.2功能的切换 (37)4.3监视显示(D P□□) (38)4.3.1 显示内容 (38)4.3.2 监视模式下操作示例 (39)4.4.1 参数设定(P A□□□)的操作示例 (39)4.5参数管理功能(EEPOP)的操作示例 (40)4.5.1 参数存储操作示例 (40)4.5.2 参数恢复出厂操作示例 (41)4.6本手册的参数书写方法 (41)4.6.1 “数值设定型”的书写方法 (42)4.6.2 “功能选择型”的书写方法 (42)第五章监视显示 (43)5.1监视显示一览 (43)5.2监视显示的操作示例 (44)5.3输入信号监视 (44)5.3.1显示步骤 (44)5.3.2显示的判别方法 (45)5.3.3显示示例 (45)5.4输出信号监视 (46)5.4.1显示步骤 (46)5.4.2显示的判别方法 (46)5.4.3显示示例 (47)5.5接通电源时的监视显示 (47)第六章试运行 (48)6.1试运行前的检查和注意事项 (48)6.2通过面板操作器进行速度试运行 (48)6.3根据上位指令进行伺服电机单体的试运行 (49)6.3.1 输入信号回路的连接和状态确认 (49)6.3.2 位置控制时的试运行 (50)6.3.3 速度控制时的试运行 (50)6.4将伺服电机与机械连接后的试运行 (51)6.5带制动器伺服电机的试运行 (51)第七章运行 (52)7.1控制方式的选择 (52)7.2通用基本功能的设定 (53)7.2.1伺服ON设定 (53)7.2.2 电机超程禁止 (53)7.2.3 超程设定 (54)7.2.4 保持制动器的设定 (54)7.3速度控制(模拟量电压指令)运行 (58)7.3.1 用户参数的设定 (58)7.3.2 输入信号的设定 (59)7.3.3 指令偏移量的手动调整 (60)7.3.4 速度指令滤波器 (61)7.3.5 零速箝位功能的使用 (61)7.3.6 编码器信号输出 (62)7.4位置控制运行 (63)7.4.2 电子齿轮的设定 (64)7.4.3 位置指令 (66)7.4.4 定位完成信号(COIN) (69)7.4.5 零速检出信号(ZSP) (69)7.4.6指令脉冲禁止功能 (INH 功能) (70)7.5转矩控制运行 (70)7.5.1 用户参数的设定 (70)7.5.2 转矩指令输入 (71)7.5.3 偏移量调整 (72)7.5.4 转矩控制时的速度限制 (72)7.6速度控制(内部设定速度选择)运行 (73)7.6.1用户参数的设定 (74)第八章故障诊断 (75)8.1报警一览表 (75)8.2报警的原因及处理措施 (75)第九章规格 (77)9.1伺服驱动器规格 (77)9.1.1 基本规格 (77)9.1.2 速度、位置、转矩控制规格 (79)9.2伺服电机规格 (80)9.2.1 60/80/90系列伺服电机参数表 (80)9.2.2 110/130系列伺服电机参数表 (81)第十章附录 (82)10.1监视模式一览 (82)10.2用户参数一览 (83)10.3部分电机参数(PA9)设定一览 (90)10.4MODBUS通讯协议 (92)10.4.1 通讯模式说明 (92)10.4.2字节结构 (92)10.4.3通讯数据结构 (93)10.4.4 LRC与CRC校验码计算方法 (98)10.4.5通讯出错反馈处理 (99)10.4.6通讯参数 (100)10.4.7驱动器参数地址 (100)第一章产品概要1.1 产品检查一套完整的伺服组件应包括以下项目:1.2 产品型号 1.2.1 铭牌说明■ EPS-EB 系列伺服驱动器铭牌说明MODEL :伺服驱动器的型号 INPUT :输入 OUTPUT :输出 VOLTS :交流电压PHASE :输入电源相数(3PH :一般是三相电输入,单相电输入也可以) 输出是三相HZ :输入电源频率AMPS:输入输入的额定电流■伺服电机铭牌说明80DNMA2-0D75DKAM :电机型号 Pn :额定功率 Nn :额定转速 In :额定电流 Un :额定电压 Tn :额定转矩Ins :电机温升等级AC SERVO DRIVESMODEL EPS-EB-0D75AA-0000INPUT VOLTS 200~230VPHASE 3 PH HZ 50/60HzAMPS 4.8A OUTPUTVOLTS 0~230VPHASE 3 PHAMPS 4.0AS/N CEAC SERVO MOTOR80DNMA2-0D75DKAMPn :0.75kw Nn :3000rpm In :3.7A Un :220V Tn :2.39N.M Ins :B Made in China CE1.2.2 型号说明■ EPS-EB 系列伺服驱动型号说明电压等级:2:220VEB 系列EPS- EB 0D75 1 2 3 - □ □ □ □内部代码 0:ST (72M ) 1:GD (108M )电源相数:1:单相 3:单/三相驱动器功率【1】【2】【3】【6】【5】【4】0:整数分频 1:任意分频【7】0:标准【8】【9】0:标准1:白色上面盖2:内置24V■ 伺服电机型号说明电机法兰130 DN M A1- 01D2 B B A M电机功率电机额定转速:A:1000R/M B:1500R/M C:2000R/M D:3000R/M电机惯量:H:高惯量 M:中惯量【1】【2】【3】【6】【5】编码器类型:H:1024线磁编B:2500线非省线增量式E:2500线省线增量式P:2500线磁编K:5000线省线增量式Q:5000线磁编1:4对极2:5对极【4】电机制动器:A:无制动刹车B:有制动刹车K:有键槽,无油封Y:无键槽,有油封M:有键槽,有油封N:无键槽,无油封【7】【8】1.2.3配线型号说明1.2.4基本参数一、以下参数(PA2、PA34、PA9)的设置方式1、将PA0改成1234;2、根据以下说明依次修改相关参数,并确认;3、恢复出厂设置(EEPOP→EE-1)。
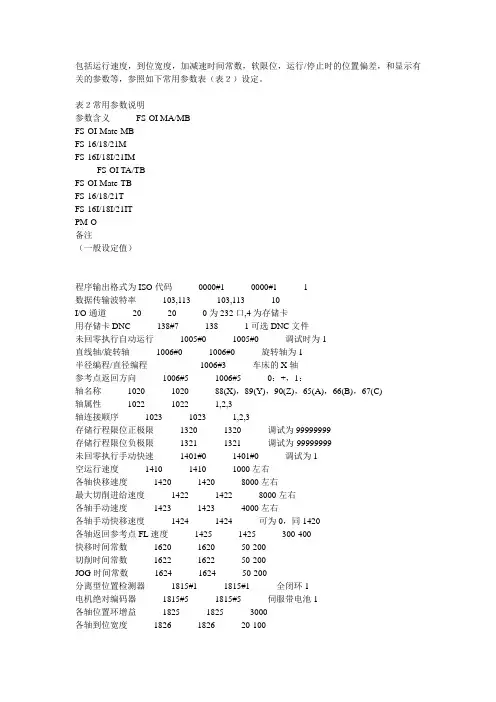
包括运行速度,到位宽度,加减速时间常数,软限位,运行/停止时的位置偏差,和显示有关的参数等,参照如下常用参数表(表2)设定。
表2常用参数说明参数含义 FS-OI MA/MBFS-OI-Mate-MBFS-16/18/21MFS-16I/18I/21IMFS-OI TA/TBFS-OI-Mate-TBFS-16/18/21TFS-16I/18I/21ITPM-O备注(一般设定值)程序输出格式为ISO代码 0000#1 0000#1 1数据传输波特率 103,113 103,113 10I/O通道 20 20 0为232口,4为存储卡用存储卡DNC 138#7 138 1可选DNC文件未回零执行自动运行 1005#0 1005#0 调试时为1直线轴/旋转轴 1006#0 1006#0 旋转轴为1半径编程/直径编程 1006#3 车床的X轴参考点返回方向 1006#5 1006#5 0:+,1:-轴名称 1020 1020 88(X),89(Y),90(Z),65(A),66(B),67(C)轴属性 1022 1022 1,2,3轴连接顺序 1023 1023 1,2,3存储行程限位正极限 1320 1320 调试为99999999存储行程限位负极限 1321 1321 调试为-99999999未回零执行手动快速 1401#0 1401#0 调试为1空运行速度 1410 1410 1000左右各轴快移速度 1420 1420 8000左右最大切削进给速度 1422 1422 8000左右各轴手动速度 1423 1423 4000左右各轴手动快移速度 1424 1424 可为0,同1420各轴返回参考点FL速度 1425 1425 300-400快移时间常数 1620 1620 50-200切削时间常数 1622 1622 50-200JOG时间常数 1624 1624 50-200分离型位置检测器 1815#1 1815#1 全闭环1电机绝对编码器 1815#5 1815#5 伺服带电池1各轴位置环增益 1825 1825 3000各轴到位宽度 1826 1826 20-100各轴移动位置偏差极限 1828 1828 调试10000各轴停止位置偏差极限 1829 1829 200各轴反向间隙 1851 1851 测量P-I控制方式 2003#3 2003#3 1单脉冲消除功能 2003#4 2003#4 停止时微小震动设1虚拟串行反馈功能 2009#0 2009#0 如果不带电机1电机代码 2020 2020 查表负载惯量比 2021 2021 200左右电机旋转方向 2022 2022 111或-111速度反馈脉冲数 2023 2023 8192参数含义 FS-OI MA/MBFS-OI-Mate-MBFS-16/18/21MFS-16I/18I/21IMFS-OI TA/TBFS-OI-Mate-TBFS-16/18/21TFS-16I/18I/21ITPM-O备注(设定值)位置反馈脉冲数 2024 2024 半12500,全(电机一转时走的微米数)柔性进给传动比(分子)N 2084,2085 2084 转动比,计算互锁信号无效 3003#0 3003#0 *IT(G8.0)各轴互锁信号无效 3003#2 3003#2 *ITX-*IT4(G130)各轴方向互锁信号无效 3003#3 3003#2 *ITX-*IT4(G132,G134)减速信号极性 3003#5 3003#5 行程(常闭)开关0接近(常开)开关1超程信号无效 3004#5 3004#5 出现506,507报警时设定1显示器类型 3100#7 3100#7 0单色,1彩色中文显示 3102#3 3102#3 1实际进给速度显示 3105#0 3105#0 1主轴速度和T代码显示 3105#2 3105#2 1主轴倍率显示 3106#5 3106#5 1实际手动速度显示指令 3108#7 3108#7 1伺服调整画面显示 3111#0 3111#0 1主轴监控画面显示 3111#1 3111#1 1操作监控画面显示 3111#5 3111#5 1伺服波形画面显示 3112#0 3112#0 需要时1,最后要为0指令数值单位 3401#0 3401#0 0:微米,1:毫米各轴参考点螺补号 3620 3620 实测各轴正极限螺补号 3621 3621各轴负极限螺补号 3622 3622螺补数据放大倍数 3623 3623螺补间隔 3624 3624是否使用串行主轴 3701#1 3701#1 0带,1不带检测主轴速度到达信号 3708#0 3708#0 1 检测主轴电机最高钳制速度 3736 限制值/最大值*4095主轴各档最高转速 3741/2/3 3741/2/3/4 电机最大值/减速比是否使用位置编码器 4002#1 4002#1 使用1主轴电机参数初始化位 4019#7 4019#7主轴电机代码 4133 4133CNC控制轴数 8130(OI) 8130(OI)CNC控制轴数 1010 1010 8130-PMC轴数手轮是否有效 8131#0(OI) 8131#0(OI) 设0为步进方式串行主轴有效 3701#1 3701#1直径编程 1006#3 同时CMR=1表3α/β伺服电机代码表(OLD)电机型号β1/3000 β2/3000 β3/3000 β6/2000 αc3/2000 αc6/200 0电机代码 35 36 33 34 7 8电机型号αc12/2000 αc22/1500 α3/3000 α6/2000 α6/3000 α12/ 2000电机代码 9 10 15 16 17 18电机型号α12/3000 α22/1500 α22/2000 α22/3000 α30/1200 α30 /2000电机代码 19 27 20 21 28 22电机型号α30/3000 α40/FAN α40/2000 α65 α100/2000 α150电机代码 23 29 30 39 40 41表4α主轴电机代码表(OLD)电机型号α3/8000 α6/8000 α8/6000 α12/6000 α15/6000 α18/60 00电机代码 105 106 107 108 109 110电机型号αp8/6000 αp12/6000 αp15 αp18 αp22 αp30电机代码 112 113 114 115 116 117表5i系列伺服电机代码表电机型号β4/4000is β8/3000is β12/3000is β22/2000is αc4/3000i电机代码 156(256) 158(258) 174(274) 176(276) 171(271)电机型号αc8/2000i αc12/2000i αc22/2000i αc30/1500i α2/5000i电机代码 176(276) 191(291) 196(296) 201(301) 155(255)电机型号α4/3000i α8/3000i α12/3000i α22/3000i α30/3000i电机代码 173(273) 177(277) 193(293) 197(297) 203(303)电机型号α40/3000i α4/5000is α8/4000is α12/4000is α22/4000is电机代码 207(307) 165(265) 185(285) 188(288) 215(315)电机型号α30/4000is α40/4000is α50/3000is α50/3000isFAN α100/2500is电机代码 218(318) 222(322) 224(324) 225(325) 235(325)表6i系列主轴电机代码表电机型号β3/10000i β6/10000i β8/8000i β12/7000i ac15/6000 i电机代码 332 333 334 335 246电机型号 ac1/6000i ac2/6000i ac3/6000i ac6/6000i ac8/6000i a c12/6000i电机代码 240 241 242 243 244 245电机型号α0.5/10000i α1/10000i α1.5/10000i α2/10000i α3/10000i α6/10000i电机代码 301 302 304 306 308 310电机型号α8/8000i α12/7000i α15/7000i α18/7000i α22/7000i α30/6000i电机代码 312 314 316 318 320 322电机型号α40/6000i α50/4500i α1.5/15000i α2/15000i α3/12000iα6/12000i电机代码 323 324 305 307 309 401电机型号α8/10000i α12/10000i α15/10000i α18/10000i α22/10000i电机代码 402 403 404 405 406电机型号α12/6000ip α12/8000ipα15/6000ip α15/8000ip α18/6000ip α18/8000ip电机代码 407 4020 (8000)4023 (94) 408 4020 (8000)4023 (94) 409 4020 (8000)4023 (94)电机型号α22/6000ip α22/8000ip α30/6000ip α40/6000ip α50/6000ip α60/4500ip电机代码 410 4020 (8000)4023 (94) 411 412 413 414。
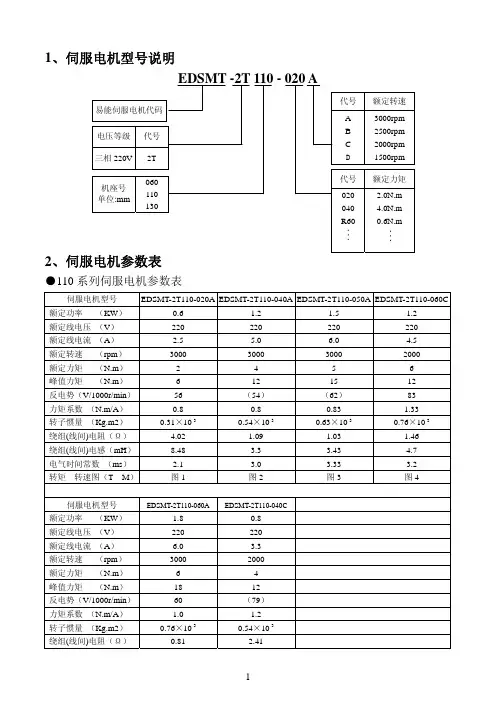
1、伺服电机型号说明2、伺服电机参数表●110系列伺服电机参数表EDSMT-2T110-060C 伺服电机型号 EDSMT-2T110-020A EDSMT-2T110-040A EDSMT-2T110-050A额定功率(KW)0.6 1.2 1.5 1.2 额定线电压(V)220 220 220 220 额定线电流(A) 2.5 5.0 6.0 4.5 额定转速(rpm)3000 3000 3000 2000 额定力矩(N.m) 2 4 5 6 峰值力矩(N.m) 6 12 15 12 反电势(V/1000r/min) 56 (54)(62) 83力矩系数(N.m/A) 0.8 0.8 0.83 1.33转子惯量(Kg.m2) 0.31×10-3 0.54×10-3 0.63×10-3 0.76×10-3绕组(线间)电阻(Ω) 4.02 1.09 1.03 1.46 绕组(线间)电感(mH)8.48 3.3 3.43 4.7 电气时间常数(ms) 2.1 3.0 3.33 3.2转矩—转速图(T—M)图1 图2 图3 图4伺服电机型号EDSMT-2T110-060A EDSMT-2T110-040C额定功率(KW) 1.8 0.8额定线电压(V) 220 220额定线电流(A) 6.0 3.3额定转速(rpm) 3000 2000额定力矩(N.m) 6 4峰值力矩(N.m) 18 12反电势(V/1000r/min) 60 (79)力矩系数(N.m/A) 1.0 1.2转子惯量(Kg.m2) 0.76×10-3 0.54×10-3绕组(线间)电阻(Ω) 0.81 2.41绕组(线间)电感(mH) 2.59 7.3电气时间常数(ms) 3.2 3转矩—转速图(T—M)图5 图编码器线数/(PPR) 2500F(155℃)电机绝缘等级 Class防护等级 IP65 使用环境环境温度: -20℃~ +50℃环境湿度:相对湿度<90%(不结霜条件)绕组引线 U V W PE电机绕组插座插座编号 2 3 4 1信号引线 5V 0V A+B+Z+A-B-Z-U+V+ W+ U- V-W-PE编码器插座插座编号234567891011121314151●130系列伺服电机参数表EDSMT-2T130-077B 伺服电机型号 EDSMT-2T130-040B EDSMT-2T130-050B EDSMT-2T130-060B额定功率(KW) 1.0 1.3 1.5 2.0额定线电压(V)220 220 220 220额定线电流(A) 4.0 5.0 6.0 7.5额定转速(rpm)2500 2500 2500 2500额定力矩(N.m) 4 5.0 6 7.7峰值力矩(N.m)12 15 18 22反电势(V/1000r/min)(69.3)68 65 68力矩系数(N.m/A) 1.0 1.0 1.0 1.03转子惯量(Kg.m2) 0.85×10-3 1.06×10-3 1.26×10-3 1.53×10-3绕组(线间)电阻(Ω) 2.76 1.84 1.21 1.01绕组(线间)电感(mH) 6.42 4.9 3.87 2.94电气时间常数(ms) 2.89 3.19 3.26 3.80转矩—转速图(T—M)图6 图7 图8 图9EDSMT-2T130-150B 伺服电机型号 EDSMT-2T130-100D EDSMT-2T130-100B EDSMT-2T130-150D额定功率(KW) 1.5 2.6 2.3 3.8额定线电压(V)220 220 220 220额定线电流(A) 6.0 10 9.5 17额定转速(rpm)1500 2500 1500 2500额定力矩(N.m)10 10 15 15峰值力矩(N.m)25 25 30 30反电势(V/1000r/min)103 70 114 67力矩系数(N.m/A) 1.67 1.0 1.58 0.88转子惯量(Kg.m2) 1.94×10-3 1.94×10-3 2.77×10-3 2.77×10-3绕组(线间)电阻(Ω) 1.29 0.73 1.1 0.49绕组(线间)电感(mH) 5.07 2.45 4.45 1.68电气时间常数(ms) 3.93 3.64 4.45 4.02转矩—转速图(T—M)图10 图11 图12 图13编码器线数/(PPR) 2500 电机绝缘等级 Class F (155℃) 防护等级 IP65使用环境 环境温度: -20 ℃~ +50℃ 环境湿度:相对湿度<90%(不结霜条件) 绕组引线 U V W PE 电机绕组插座 插座编号 2 34 1 信号引线 5V 0V A+B+Z+A-B-Z-U+V+ W+ U- V-W-PE 编码器插座插座编号234567891011121314151110/130系列伺服电机安装尺寸110系列 130系列 10 15额定转矩(N ·m)2 4 5 6 4 5 6 7.71500 2500 15002500LA 159 189 204 219 166 171 179 192 213 209 241 231 LB 55 55 55 55 57 57 57 57 57 57 LC 5 5 5 5 5 5 5 5 5 5 LD 12 12 12 12 14 14 14 14 14 14 LE 95 95 95 95 110 110 110 110 110 110 LF 110 110 110 110 130 130 130 130 130 130 LG 130 130 130 130 145 145 145 145 145 145 LZ 9 9 9 9 9 9 9 9 9 9 S 19 19 19 19 22 22 22 222222注:抱闸为8N.m;Dc99V。
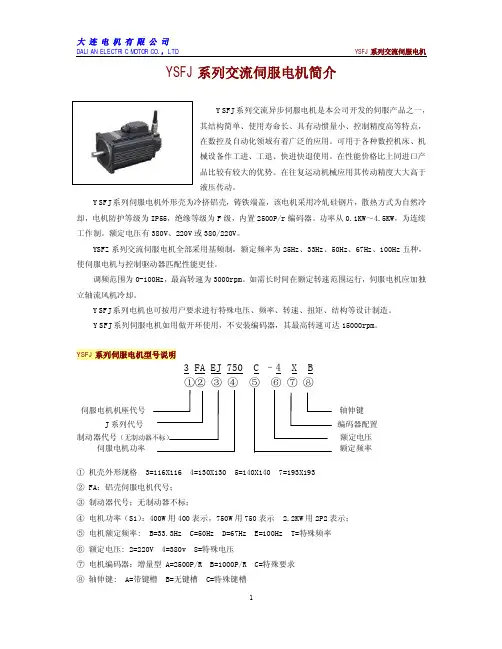
●型号命名
电动机的型号由机座号、产品名称代号、性能参数代号等部分组成□ ST-□□□
派生代号
性能参数代号
反馈元件代号(M代表代表光电编码器)
正弦波驱动电机
机座号
机座号为:110、130。
反馈元件代号:M—光电脉冲编码器。
性能参数代号:前三位表示额定转矩;
后两位表示额定转速;
如性能参数代号02030表示额定转矩2N·m,额定转速3000rpm。
派生代号:Z—失电制动器。
●110系列伺服电机参数表
●130系列伺服电机参数表
●110/130系列伺服电机安装尺寸:
注:抱闸为8N.m;Dc99V。
插座管脚为1,2脚。
LA尺寸:110系列加长74mm。
130系列加长57mm。
●60系列伺服电机参数表
●60系列伺服电机安装尺寸:
●90系列伺服电机参数表
90伺服电机安装尺寸图:
●80系列伺服电机参数表80伺服电机安装尺寸图:。
第六章报警与处理6.1 驱动器报警EPS系列驱动器有多种保护功能。
当其中一个保护被激活时,驱动器将按照一定的时序关断输出,同时产生报警。
报警产生后,发光二极管面板显示一个报警号码,5个LED小数点位闪烁,伺服ON关断。
报警出现后,请及时切断电源,根据报警代码进行排除故障工作,如果判定为驱动器内部故障,请联系我公司给予解决。
表6.1 报警一览表报警号码报警名称原因―― 正常1 过载电机定子电流长时间过大2 主电源欠压主电路电源低于电源电压门限值3 过压主电路电源高于电源电压门限值4 控制电源欠压控制回路电压低于电源电压门限值8 电机过速电机速度长时间超过额定速度9 位置偏差过大位置偏差计数器值超过设定值12 串行通讯错误伺服驱动器接收到的数据经过CRT校验发现与上位机发送数据不一致。
14 CAN通讯错误CAN通讯错误16 EEPROM参数错误EEPROM存储区中的数据被破坏20 IPM报警IPM的保护引脚上一直为高电平21 电流V相检测异常电流V相检测过大22 电流W相检测异常电流W相检测过大25 编码器AB脉冲丢失驱动器与编码器之间检不出A、B相脉冲,或编码器发送一个错误数据。
26 编码器Z脉冲丢失电机轴每转一圈产生的一个Z脉冲信号未检测到。
报警号码报警名称原因27 编码器UVW信号错误编码器U、V、W信号错误30 速度跟踪异常电机转速与实际给定转速差别较大6.2 报警处理下面列举了几种非报警故障,并且给出了排除故障的简单对策。
Ø电机不转1.参数:控制模式(PA 4)选择不当;电机型号选择参数(PA 9)设置不当;2. 接线:检查电机动力线(U、V、W、PE)配线相序;检查动力线或编码器线是否连接不良;检查控制信号是否连接正确,是否连接不良;注:伺服ON信号可通过输入端子状态(dP 18)监控;位置指令脉冲信号可通过接收脉冲数(dP 3)监控;3. 机械原因:电机轴被机械卡死(电机堵转);若电机为抱闸电机,则必须提供电源解抱闸;4.伺服电机或伺服驱动器本身故障;Ø旋转不平滑1.安装:检查电机与机械连接安装是否正常2.接线:检查电机动力线(U、V、W、PE)配线相序;检查动力线或编码器线是否连接不良;参数:提高速度环增益(PA 14)或提高电流环增益(PA 38);Ø电机产生异常响声或振动1.参数:增益太高,速度环增益(PA 14)太高导致振荡;2.安装:检查电机与机械连接安装是否正常对每种报警,表6.3给出了其一般的处理办法表6.3 报警处理办法报警代码报警名称运行状态发生原因处理方法1 过载保护伺服ON时电机型号参数不符合请与我司售后联系编码线﹑动力线异常检查电机动力线(U、V、W、PE)配线相序检查动力线或编码器线是否连接不良伺服驱动异常更换驱动输入命令后,电机不转电机被机械卡死或负载过大重新确定负载条件,或换大容量电机编码线﹑动力线异常检查编码线,动力线是否连接不良伺服驱动异常更换驱动运行过程中有效扭矩超过额定转矩重新确定负载条件,或换大容量电机编码线﹑动力线异常检查编码线,动力线是否松动或坏伺服驱动异常更换驱动2 主电压欠压接通主电源时电源电压低于指定电压检查R、T输入的AC电源监控驱动器的母线电压值(dP 16)是否异常驱动伺服异常更换驱动运行时电源电压低(不稳定)检查R、T输入的AC电源是否有过大的波动;监控驱动器的母线电压值(dP 16)是否异常驱动伺服异常更换驱动3 主电压过压接通主电路电源时电源电压过大将AC电源调节至正常范围监控驱动器的母线电压值(dP 16)是否异常伺服驱动异常更换驱动电机运行或停止时负载转动惯性大,制动电阻功率不足重新确定负载及运行条件或者外加大功率的制动电阻电源电压过大(不稳定)将AC电源调节至正常范围监控驱动器的母线电压值(dP 16)是否异常伺服驱动异常更换驱动报警代码报警名称运行状态发生原因处理方法4 控制电压欠压接通电路时驱动伺服异常更换驱动L1、L2输入电源不足。
高响应交流伺服电机――――3_1 ISMV&ISMH系列高响应交流伺服电机用户手册Ver0.0 深圳市汇川技术股份有限公司前言感谢您使用汇川公司ISMV&ISMH系列高响应交流伺服电机。
该系列交流伺服电机是一种快速响应、精确定位的交流伺服电机。
该产品需要配合伺服驱动器一起组成一套驱动系统,可用于各种需要精确定位、精密控制的场合。
在使用该系列电机之前,请您仔细阅读本使用说明书各项内容,以保证该电机的正确安装、连接、使用和维护。
注意事项♦本使用说明书中的图例仅为了说明,可能会与您订购的产品有所不同。
♦由于产品升级或规格变更,以及为了提高说明书的便利性和准确性,本说明书的内容会及时进行变更。
♦由于损坏或遗失而需要订购使用说明书时,请与本公司各区域代理商联系,或直接与本公司客户服务中心联系。
♦如果您使用中仍有一些使用问题不明,请与本公司客户服务中心联系。
♦客服电话:400-777-12601.1 安全及注意事项a、使用前用500V兆欧表检查电机U、V、W对电机外壳的绝缘电阻,应该不低于2MΩ。
b、使用时应有良好的接地。
c、电机转动时请不要用手触摸电机的轴伸。
d、不要撞击电机,以免造成光电编码器损坏。
e、装机前电机须空载与伺服驱动器联调正常。
1.2 产品使用环境海拔高度:1000米以下环境温度:0℃~40℃相对湿度:20%-80%(不得结露)IP等级:全封闭自冷却IP65、风冷IP54(轴贯通部分除外)电机需要安装在通风良好、且不能够太阳直晒的室内环境1.3 选配件本公司的电机默认都是带油封的,若不需要请在订货中注明,其余配件也请一并注明。
1.4 到货检查收到您订购的产品后,开箱检查以下内容,如有不符请您与订购的代理商或本公司联系。
a、请核对产品的铭牌,确认是否是您订购的产品。
b、检查电机外观有无在运输中损坏。
c、除产品本身以及使用说明书外,确认您所订购的附件是否完整。
1.5 搬运和储存该产品为精密制造产品,搬运以及使用中周转一定要轻拿轻放、防止碰撞,禁止敲击电机或用手提拉电机和光电编码器的引出线,以免造成产品损坏。
四轴参数说明N0000 00000010 (#2=0公制输入单位,=1为英制,这里只设公英制输入单位,机床公英制由1001#0决定;#1=1输出ISO代码,=0为EIA代码)N0001 P 00000000 #1=0纸带格式为标准格式N0002 P 00000000 (手动回零:#7 =0参考点未建立,利用减速挡块,已建立,快速定位到参考点(1005#3=1有效),#7=1都利用减速挡块回零)N0012 A1 P 00000000 A2 P 00000000 A3 P 00000000 A4 P 00000000 #0各轴镜像设定:=0关断,=1开通// 以下为串口参数N0020 P 0 (0/1:选择串口1,即JD5A;2:选择串口2,即JD5B)N0100 P 00101000 (#3=1 ISO代码对EOB仅输出LF;#5=1 DNC中连续读入直到缓冲区满,=0一段一段读入) N0101 P 00000001 (#0=1停止位两位,=0为1位;#3=0输入代码为EIA或ISO代码自动识别,=1为ASC||代码)N0102 P 0 (输入输出为RS232,使用DC1~DC4)N0103 P 11 (波特率为9600)N0110 P 00000000N0111 P 00000001 (以下为NO.0020=1时通道1,即JD5A的参数;同上含义)N0112 P 6N0113 P 10N0121 P 00000001 (以下为NO.0020=2时通道2,即JD5B的参数;同上含义)N0122 P 0N0123 P 10N0960 P 00000000// 以下为轴控制和设定单位参数N1001 P 00000000 (#0=0公制机床,=1英制机床)N1002 P 00001001 (#0=1手动同时控制轴数3轴;#2=0不使用参考点偏移功能;#3=1未回零运行G28:P/SNO.090报警;#1=1无挡块回零全轴有效,与1005#1无关)N1004 P 00000000 (#7,#1=0,最小设定和移动单位为1um或0.001deg,是-B)N1005 A1 P 00110000 A2 P 00110000 A3 P 00110000 A4 P 00110000 (#4,#5=1各轴正负方向外部减速信号对快进和工进都有效;未建立参考点自动运行#0=0,报警P/S224,#0=1,不报警,即是说不回零也可自动运行;#1=0无挡块回零无效,1002#1为0该参数设定有效)N1006 A1 P 00100000 A2 P 00000000 A3 P 00000000 A4 P 00000001 (A4,#0=1旋转轴A型,#5=0回零都为正方向)N1008 A1 P 00000000 A2 P 00000000 A3 P 00000000 A4 P 00000101 (#0=1启动旋转轴循环功能;#2=1相对坐标每转移动量取整)绝对指令旋转方向#1=0,按距目标较近的方向,#=1,按指令符号方向。