空间前方交会及其应用
- 格式:ppt
- 大小:683.00 KB
- 文档页数:18
空间后交—前交程序设计(实验报告)姓名:班级:学号:时间:空间后交-前交程序设计一、实验目的用 C 、VB或MATLAB语言编写空间后方交会-空间前方交会程序⑴提交实习报告:程序框图、程序源代码、计算结果、体会⑵计算结果:像点坐标、地面坐标、单位权中误差、外方位元素及其精度二、实验数据f=150。
000mm,x0=0,y0=0三、实验思路1。
利用空间后方交会求左右像片的外方位元素(1).获取m(于像片中选取两点,于地面摄影测量坐标系中选取同点,分别计算距离,距离比值即为m),x,y,f,X,Y,Z(2).确定未知数初始值Xs,Ys,Zs,q,w,k(3).计算旋转矩阵R(4).逐点计算像点坐标的近似值(x),(y)(5)。
组成误差方程式(6)。
组成法方程式(7).解求外方位元素(8)。
检查是否收敛,即将求得的外方位元素的改正数与规定限差比较,小于限差即终止;否则用新的近似值重复步骤(3)-(7)2。
利用求出的外方位元素进行空间前交,求出待定点地面坐标(1).用各自像片的角元素计算出左、右像片的方向余弦值,组成旋转矩阵R1,R2(2)。
根据左、右像片的外方位元素,计算摄影基线分量Bx,By,Bz(3)。
计算像点的像空间辅助坐标(X1,Y1,Z1)和(X2,Y2,Z2)(4).计算点投影系数N1和N2(5)。
计算未知点的地面摄影测量坐标四、实验过程⑴程序框图函数AandL%求间接平差时需要的系数%%%已知%a=像点坐标x,b=像点坐标y,f内方位元素主距%φ=q,ψ=w,κ=k%像空间坐标系X,Y,Z%地面摄影测量坐标系Xs,Ys,Zsfunction [A1,L1,A2,L2]=AandL(a,b,f,q,w,k,X,Y,Z,Xs,Ys,Zs) %%%%%%%%%%%选择矩阵元素a1=cos(q)*cos(k)—sin(q)*sin(w)*sin(k);a2=-cos(q)*sin(k)—sin(q)*sin(w)*cos(k);a3=-sin(q)*cos(w);b1=cos(w)*sin(k);b2=cos(w)*cos(k);b3=—sin(w);c1=sin(q)*cos(k)+cos(q)*sin(w)*sin(k);c2=—sin(q)*sin(k)+cos(q)*sin(w)*cos(k);c3=cos(q)*cos(w);%%%%%%%共线方程的分子分母X_=a1*(X—Xs)+b1*(Y-Ys)+c1*(Z-Zs);Y_=a2*(X-Xs)+b2*(Y—Ys)+c2*(Z-Zs);Z_=a3*(X—Xs)+b3*(Y—Ys)+c3*(Z-Zs);%%%%%%%近似值x=-f*X_/Z_;y=-f*Y_/Z_;%%%%%%%A组成L组成a11=1/Z_*(a1*f+a3*x);a12=1/Z_*(b1*f+b3*x);a13=1/Z_*(c1*f+c3*x);a21=1/Z_*(a2*f+a3*y);a22=1/Z_*(b2*f+b3*y);a23=1/Z_*(c2*f+c3*y);a14=y*sin(w)-(x/f*(x*cos(k)—y*sin(k))+f*cos(k))*cos(w);a15=-f*sin(k)—x/f*(x*sin(k)+y*cos(k));a16=y;a24=—x*sin(w)-(y/f*(x*cos(k)-y*sin(k))—f*sin(k))*cos(w);a25=-f*cos(k)-y/f*(x*sin(k)+y*cos(k));a26=-x;lx=a—x;ly=b-y;%%%%%%%%%组成一个矩阵,并返回A1=[a11,a12,a13,a14,a15,a16];A2=[a21,a22,a23,a24,a25,a26];L1=lx;L2=ly;函数deg2dms%%%%%%%%角度转度分秒function y=deg2dms(x)a=floor(x);b=floor((x-a)*60);c=(x-a—b/60)*3600;y=a+(b/100)+(c/10000);函数dms2deg%%%%%度分秒转度function y=dms2deg(x)a=floor(x);b=floor((x-a)*100);c=(x-a—b/100)*10000;y=a+b/60+c/3600;函数ok%%%%%%%%%%%%%%目的是为了保证各取的值的有效值%%xy为n*1,a为1*nfunction result=ok(xy,a)format short gi=size(xy,1);for n=1:io=xy(n)—floor(xy(n,1));o=round(o*(10^a(n)))/(10^a(n));xy(n,1)=floor(xy(n,1))+o;endformat long gresult=xy;函数rad2dmsxy%%%%求度分秒表现形式的三个外方位元素,三个角度function xydms=rad2dmsxy(xy)[a,b,c,d,e,f]=testvar(xy);d=deg2dms(rad2deg(d));e=deg2dms(rad2deg(e));f=deg2dms(rad2deg(f));xydms=[a,b,c,d,e,f]';函数spacehoujiao%%%%%%%空间后交%%% f%%输入p(2*n,1)%%像点坐标x,y,X,Y,Z,均为(n,1)function [xy,m,R]=spacehoujiao(p,x,y,f,X,Y,Z)format long;%%%%%权的矢量化,这是等精度时的,如果非,将函数参数改为PP=diag(p);%%求nj=size(X,2);%%初始化Xs=0;Ys=0;Zs=0;for n=1:jXs=Xs+X(n);Ys=Ys+Y(n);Zs=Zs+Z(n);endSx=sqrt((x(2)-x(1))^2+(y(2)—y(1))^2);%%%%两像点之间距离Sd=sqrt((X(2)-X(1))^2+(Y(2)-Y(1))^2);%%%%两地面控制点之间距离m=Sd/Sx; %%%%图像比例系数Xs=Xs/j;Ys=Ys/j;Zs=m*f+Zs/j;m0=0;q=0;w=0;k=0;i=0;a=rand(2*j,6);l=rand(2*j,1);%%%%for n=1:j[a(2*n—1,:),l(2*n—1,1),a(2*n,:),l(2*n,1)]=AandL(x(n),y(n),f,q,w,k,X(n),Y(n),Z(n),Xs,Ys,Zs);enddet=inv(a’*P*a)*transpose(a)*P*l;%%%%%%%%%循环体while 1%%%%%%%%%%%%%%%%[dXs,dYs,dZs,dq,dw,dk]=testvar(det);detXs=abs(dXs);detYs=abs(dYs);detZs=abs(dZs);detq=abs(dq);detw=abs(dw);detk=abs(dk);%%%%%%%%%if ((detXs<0。
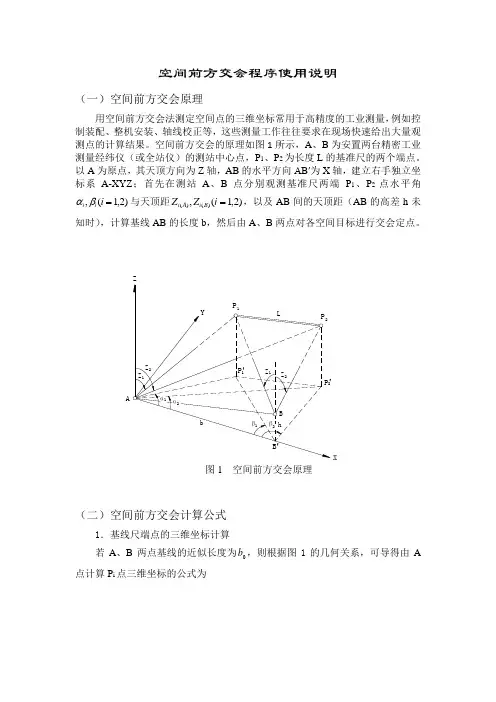
空间前方交会程序使用说明(一)空间前方交会原理用空间前方交会法测定空间点的三维坐标常用于高精度的工业测量,例如控制装配、整机安装、轴线校正等,这些测量工作往往要求在现场快速给出大量观测点的计算结果。
空间前方交会的原理如图1所示,A 、B 为安置两台精密工业测量经纬仪(或全站仪)的测站中心点,P 1、P 2为长度L 的基准尺的两个端点。
以A 为原点,其天顶方向为Z 轴,AB 的水平方向AB′为X 轴,建立右手独立坐标系A-XYZ ;首先在测站A 、B 点分别观测基准尺两端 P 1、P 2点水平角)2,1(,=i i i βα与天顶距)2,1(,)()(=i Z Z B i A i ,以及AB 间的天顶距(AB 的高差h 未知时),计算基线AB 的长度b ,然后由A 、B 两点对各空间目标进行交会定点。
AZX图1 空间前方交会原理(二)空间前方交会计算公式1.基线尺端点的三维坐标计算若A 、B 两点基线的近似长度为0b ,则根据图1的几何关系,可导得由A 点计算P i 点三维坐标的公式为)sin(cot sin )sin(sin sin )sin(sin cos )(0)(00i i A i i A i i i i i i i i i i i Z b z b y b x βαββαβαβαβα+=+=+= (1)从B 点计算P i 点的z 坐标的公式为h Z b z i i B i i B i ++=)sin(cot sin )(0)(βαα (2)从A 、B 点测定P i 点的z 坐标之差及其平均值为:)()(B i A i i z z z -=∆ (3))(21)()(B i A i i z z z +=(4) 2.两台全站仪间的高差计算两台全站仪横轴之间的高差h 可以用瞄准大致在水平方向的同一个目标,分别用三角高程测量的方法测定其高差,按两台仪器测得高差之差计算h 。
3.测站中心点间的基线长度计算由基准尺的两个端点P 1、P 2的坐标可求得计算基准尺的计算长度为:2212212210)()()(z z y y x x L -+-+-= (5)如果基准尺水平安置,则可用下式计算;2212210)()(y y x x L -+-= (6)因基准尺精确长度L 已知,可按下式计算基线精确长度,L Lb b = (7) 4.目标点三维坐标计算求得了基线的精确长度b ,可交会计算任何目标点的三维坐标,为了便于计算器的程序编制,计算公式(1)、(2)进行改写如下:)sin(sin )sin(sin i i iB i i iA bD b D βααβαβ+=+= (8)iA i i A i D y D x ααsin cos == (9)hZ D z Z D z B i B B i A i A A i +÷=÷=)()()()(tan tan (10)(三)空间前方交会计算LISP程序设计根据空间前方交会计算的特点:(1)从两个测站向目标点观测水平角和天顶距的前方交会计算需要多次进行;(2)每个角度的“度.分秒”记录数值都需要化为弧度单位才能在LISP程序中运算;(3)读取文件中的每一行角度观测值(水平角和天顶距)均以字符形式记录,需要分段区分并作数据的类型转换。

空间后方—前方交会的原理
以空间后方—前方交会的原理为题,我来为大家描述一下。
空间后方—前方交会是一种用于确定目标位置的方法,常用于航空、导航、测绘等领域。
它利用人眼的立体视觉和视差效应,通过观察目标在不同视角下的位置变化,来推断目标的实际位置。
这种方法可以较精确地确定目标的距离和方位,尤其适用于远距离观测。
在进行空间后方—前方交会时,我们首先需要选择两个观测点,它们之间的距离应足够远,以便产生明显的视差效应。
然后,我们分别在这两个观测点上观察目标,并记录下目标在两个观测点的位置。
接下来,我们需要测量观测点之间的距离,并确定观测点与目标之间的夹角。
这些数据将用于计算目标的实际位置。
通过对两个观测点的位置和距离进行几何分析,我们可以得到目标相对于观测点的位移向量。
然后,我们再将这个位移向量与观测点之间的夹角结合起来,就可以计算出目标相对于观测点的实际位置。
空间后方—前方交会的原理基于视差效应,即当我们观察远处的目标时,由于两只眼睛的视角不同,目标在两只眼睛中的位置也会有所不同。
通过比较这两个位置的差异,我们就可以推断出目标的实际位置。
总的来说,空间后方—前方交会是一种利用视差效应来确定目标位
置的方法。
它可以在远距离观测中提供较为准确的测量结果,具有广泛的应用前景。
前方交会投影系数法例题一、前方交会投影系数法的基本概念前方交会投影系数法是一种测量空间坐标的方法,主要用于测量地下或封闭空间中的目标点坐标。
该方法通过在观测点处设置测距仪和测角仪,测量目标点与观测点之间的水平距离和垂直距离,从而计算出目标点的空间坐标。
前方交会投影系数法具有测量精度高、操作简便等优点。
二、前方交会投影系数法的应用场景前方交会投影系数法广泛应用于地下矿山、隧道、基坑等地下工程测量,以及建筑、桥梁、水利等工程测量领域。
在这些场景中,由于观测点与目标点之间存在一定的距离和角度,采用前方交会投影系数法可以有效提高测量精度。
三、前方交会投影系数法的计算步骤1.设置观测点:在测量范围内选择合适的观测点,设置测距仪和测角仪。
2.测量水平距离和垂直距离:分别测量目标点与观测点之间的水平距离(D)和垂直距离(H)。
3.计算投影系数:根据测量得到的水平距离和垂直距离,计算前方交会投影系数(K)。
4.计算目标点坐标:利用投影系数和已知的观测点坐标,计算目标点的空间坐标。
四、常见问题及解答1.问:前方交会投影系数法适用于哪些场景?答:前方交会投影系数法适用于地下矿山、隧道、基坑等地下工程测量,以及建筑、桥梁、水利等工程测量领域。
2.问:如何提高前方交会投影系数法的测量精度?答:要提高前方交会投影系数法的测量精度,可以从以下几个方面入手:(1)选择合适的观测点和测距仪、测角仪;(2)确保测量过程中观测点、目标点之间的距离和角度准确无误;(3)采用高精度的测量仪器,如全站仪、激光测距仪等;(4)合理设置测量次数,以提高测量结果的可靠性。
3.问:前方交会投影系数法与平面坐标系的区别是什么?答:前方交会投影系数法得到的是目标点的空间坐标(三维坐标),而平面坐标系得到的是目标点的水平坐标(二维坐标)。
两者主要区别在于测量精度、应用场景和测量结果的维度。
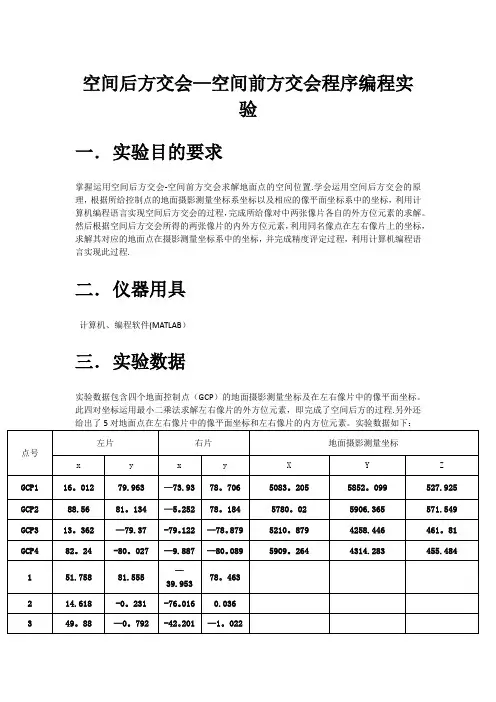
空间后方交会—空间前方交会程序编程实验一.实验目的要求掌握运用空间后方交会-空间前方交会求解地面点的空间位置.学会运用空间后方交会的原理,根据所给控制点的地面摄影测量坐标系坐标以及相应的像平面坐标系中的坐标,利用计算机编程语言实现空间后方交会的过程,完成所给像对中两张像片各自的外方位元素的求解。
然后根据空间后方交会所得的两张像片的内外方位元素,利用同名像点在左右像片上的坐标,求解其对应的地面点在摄影测量坐标系中的坐标,并完成精度评定过程,利用计算机编程语言实现此过程.二.仪器用具计算机、编程软件(MATLAB)三.实验数据实验数据包含四个地面控制点(GCP)的地面摄影测量坐标及在左右像片中的像平面坐标。
此四对坐标运用最小二乘法求解左右像片的外方位元素,即完成了空间后方的过程.另外还给出了5对地面点在左右像片中的像平面坐标和左右像片的内方位元素。
实验数据如下:内方位元素:f=152。
000mm,x0=0,y0=0 四.实验框图此过程完成空间后方交会求解像片的外方位元素,其中改正数小于限差(0。
00003,相当于0。
1'的角度值)为止。
在这个过程中采用迭代的方法,是外方位元素逐渐收敛于理论值,每次迭代所得的改正数都应加到上一次的初始值之中。
在空间后方交会中运用的数学模型为共线方程确定Xs,Ys,Zs的初始值时,对于左片可取地面左边两个GCP的坐标的平均值作为左片Xs 和Ys的初始值,取右边两个GCP的坐标平均值作为右片Xs 和Ys的初始值。
Zs可取地面所有GCP的Z坐标的平均值再加上航高.空间前方交会的数学模型为:五.实验源代码function Main_KJQHFJH()global R g1 g2 m G a c b1 b2;m=10000;a=5;c=4;feval(@shuru);%调用shuru()shurujcp()函数完成像点及feval(@shurujcp);%CCP有关数据的输入XYZ=feval(@MQZqianfangjh); %调用MQZqianfangjh()函数完成空间前方、%%%%%% 单位权中误差%%%%%后方交会计算解得外方位元素global V1 V2;%由于以上三个函数定义在外部文件中故需VV=[]; %用feval()完成调用过程for i=1:2*cVV(i)=V1(i);VV(2*i+1)=V2(i);endm0=sqrt(VV*(VV’)/(2*c-6));disp('单位权中误差m0为正负:’);disp(m0); %计算单位权中误差并将其输出显示输入GCP像点坐标及地面摄影测量坐标系坐标的函数和输入所求点像点坐标函数:function shurujcp()global c m;m=input(’摄影比例尺:');%输入GCP像点坐标数据函数并分别将其c=input('GCP的总数=');%存入到不同的矩阵之中disp('GCP左片像框标坐标:');global g1;g1=zeros(c,2);i=1;while i<=cm=input('x=');n=input('y=');g1(i,1)=m;g1(i,2)=n;i=i+1;enddisp('GCP右片像框标坐标:’);global g2;g2=zeros(c,2);i=1;while i〈=cm=input('x=’);n=input('y=’);g2(i,1)=m;g2(i,2)=n;i=i+1;end%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function shuru()global a;a=input('计算总像对点数='); %完成想计算所需的像平面坐标global b1;%坐标输入,存入不同的矩阵中b1=zeros(a,2);disp('左片像点坐标:')i=1;while i〈=am=input('x=’);n=input(’y=’);b1(i,1)=m;b1(i,2)=n;i=i+1;end%%global b2;b2=zeros(a,2);disp(’右片像点坐标:')i=1;while i〈=am=input('x=’);n=input('y=’);b2(i,1)=m;b2(i,2)=n;i=i+1;end%%global c;c=input(’GCP的总数=');disp('GCP摄影测量系坐标:’)global G;G=zeros(3,c);i=1;while i〈=cm=input(’X=');n=input(’Y=');v=input(’Z=');G(i,1)=m;G(i,2)=n;G(i,3)=v;i=i+1;end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%空间前方交会和后方交会函数:function XYZ=MQZqianfangjh()global R1 R2 a f b1 b2 Ra Rb;global X1 X2;R1=Ra;R2=Rb;R1=zeros(3,3);R2=zeros(3,3);global g1 g2 G V1 V2 V WF c QXX QXX1 QXX2;xs0=(G(1,1)+G(3,1))/2;ys0=(G(1,2)+G(3,2))/2;[Xs1,Ys1,Zs1,q1,w1,k1 R]=houfangjh(g1,xs0,ys0);%对左片调用后方交会函数R1=R;V1=V;WF1=WF;QXX1=QXX;save '左片外方位元素为。
空间后方—前方交会的原理空间后方—前方交会是一种导航技术,通过测量目标物体在不同观测点的角度,并利用三角测量原理计算目标物体的位置。
这种技术广泛应用于航空、航天、导航等领域,可以帮助人们准确地确定目标物体的位置和方向。
在空间后方—前方交会中,观测者需要站在不同的位置观测目标物体,并测量目标物体相对于观测点的角度。
观测者需要使用测角仪或其他测量工具来测量角度,并记录下相应的数据。
测量完所有观测点的角度后,观测者需要根据这些角度数据进行三角计算,以确定目标物体的位置。
三角计算是利用三角函数来计算角度和边长的关系,通过已知的角度和边长来计算未知的角度和边长。
观测者需要根据测量得到的角度数据和观测点之间的距离,使用三角函数计算目标物体的位置坐标。
空间后方—前方交会的原理简单明了,但在实际应用中需要考虑一些因素。
首先,观测者需要选择合适的观测点,观测点的位置应尽量避免遮挡物,以确保观测到目标物体的角度准确无误。
其次,观测者需要准确测量角度,并尽量避免误差的产生。
最后,观测者需要进行精确的三角计算,以确保计算出的目标物体位置准确无误。
空间后方—前方交会技术的应用非常广泛。
在航空领域,飞行员可以利用该技术确定飞机的位置和方向,以确保飞行安全。
在航天领域,航天员也可以利用该技术确定航天器的位置和方向,以实现精确的轨道控制。
此外,该技术还可以应用于导航系统中,帮助人们准确导航和定位。
空间后方—前方交会是一种通过测量目标物体在不同观测点的角度,并利用三角计算原理确定目标物体位置的导航技术。
该技术在航空、航天、导航等领域有着广泛的应用,可以帮助人们准确地确定目标物体的位置和方向。
通过合理的观测点选择、准确的角度测量和精确的三角计算,空间后方—前方交会技术可以为人们提供准确可靠的导航和定位服务。
像片比例尺:把摄影像片当作水平像片,地面取平均高程,航摄像片上的线段为l的影像与地面上相应线段的水平距离L的比值.摄影航高:当取摄区内的平均高程作为摄影基准面时,摄影瞬间摄影机物镜中心至该面的距离。
绝对航高:摄影瞬间摄影机物镜中心相对于平均海平面的航高。
相对航高:摄影瞬间摄影机物镜中心相对于某一基准面或某一点的高度.摄影基线:航线方向相邻两个摄影站点间的空间距离.常用B表示航向重叠:同一航线内相邻像片之间的影像重叠.航线重叠一般要求P%=60%~65%,最小不得小于53%旁向重叠:两相邻航带像片之间的影像重叠.旁向重叠要求q%=30%~40%,最小不得小于15%像片倾角:在摄影瞬间摄影机轴发生倾斜,摄影机轴与铅垂线方向的夹角.一般要求倾角不大于2度,最大不超过3度。
航线弯曲:把一条航线的航摄像片根据地物影像拼接起来,各张像片的主点连线不在一条直线上,而呈现为弯弯曲曲的折线。
像片旋角:相邻像片的主点连线与像幅沿航线方向两框标连线间的夹角,用k表示。
一般要求k不超过6度,最大不超过8度。
像片解析:利用数学分析的方法,研究被摄影物在航片上的成像规律(像片上得摄影与所摄影物之间的数学关系)从而建立起像点与物点得坐标关系像片的方位元素:确定摄影瞬间摄影物镜与像片在地面设定的空间坐标系中的位置与姿态的参数.像片的内方位元素:描述摄影中心与像片之间相互位置的参数.包括三个参数,即摄影中心S到像片的垂距f及像点在框标坐标系中的坐标x。
,y。
像片的外方位元素:在恢复内方位元素的基础上,确定摄影光束在摄影瞬间的空间位置和姿态参数像点位移:由于在实际航空摄影时,在中心投影的情况下,当航摄的飞机姿态出现较大倾斜或地面有起伏时,会导致地面点在航摄像片上的构象相对于理想情况下的构象所产生的位置差异.内定向:建立影像扫描坐标与像点坐标的转换关系,求取转换参数。
相对定向:通过量取模型的同名像点,解算两相邻影像的相对位置关系绝对定向:通过量取地面控制点对应的像点坐标解算模型的外方位元素,将模型纳入大地坐标。
slam 空间前方交会三维重建原理
SLAM(Simultaneous Localization and Mapping)是一种通过传感器来实时定位和地图构建的技术。
在SLAM中,空间前方交会和三维重建是两个核心原理。
空间前方交会是一种基于几何学原理的定位方法。
它通过观察目标物体在不同视角下的位置关系,来确定自身的位置。
在SLAM中,空间前方交会利用相机或激光雷达等传感器,通过测量目标物体在不同时间点或不同位置的视角,来推断自身的位置和姿态。
通过对多个观测点进行前方交会计算,可以得到更准确的定位结果。
三维重建是SLAM中的另一个重要原理。
它通过将多个观测点的二维图像或三维点云进行融合和配准,来构建一个准确的三维地图。
三维重建可以通过多种方法实现,如基于特征点匹配的方法、基于三角测量的方法等。
通过将不同时间或位置的观测数据进行融合,可以得到一个精确的三维地图,从而实现对环境的感知和理解。
SLAM的空间前方交会和三维重建原理的结合,可以实现机器人在未知环境中的自主定位和地图构建。
机器人通过不断地观测和计算,可以准确地确定自身的位置,并构建一个详细的三维地图。
这使得机器人可以在未知环境中进行导航和路径规划,实现自主探索和任务执行。
通过SLAM的空间前方交会和三维重建原理,我们可以实现更智能、
更灵活的机器人系统。
这不仅可以应用于自动驾驶、无人机等领域,还可以在工业自动化、智能家居等方面发挥重要作用。
SLAM技术的发展将为人类创造更多便利和可能性,让我们的生活变得更加智能和舒适。
空间后方—前方交会的原理以空间后方—前方交会的原理为题,我将为你创作一篇文章。
标题:穿越时空的奇妙旅程在广袤的宇宙中,隐藏着许多神秘的现象和令人着迷的规律。
其中一个令人着迷的现象就是空间后方—前方交会的原理。
它是一种神奇的现象,让我们能够穿越时空,以人类的视角来探索宇宙的奥秘。
空间后方—前方交会的原理是指当我们处于宇宙中的一个位置时,我们可以观察到在我们前方的一些星体,而当我们移动到另一个位置时,这些星体会出现在我们后方。
这一现象的解释是,宇宙中的光需要一定的时间才能传播到我们的眼睛,所以我们观察到的是过去的景象。
当我们移动到一个新的位置时,我们所看到的星体的光线需要更长的时间才能到达我们的眼睛,所以它们似乎是在我们的后方。
这一现象的实际应用非常广泛。
例如,天文学家利用这一原理来观测遥远的星系和行星。
他们通过观察不同位置的天体,可以了解宇宙的演化和发展。
空间后方—前方交会的原理也被用于导航系统中。
当我们使用GPS导航时,系统会根据我们所处的位置和目的地的坐标来计算最短路径,这就是因为导航系统利用了空间后方—前方交会的原理。
除了科学和技术应用,空间后方—前方交会的原理也给我们带来了思考。
当我们思考宇宙的边界和它的起源时,我们不禁想象着是否有一种方法让我们在时间上穿越,去看到宇宙的诞生。
虽然目前我们还无法实现这一愿望,但这种思考激发了我们对宇宙的好奇心和探索欲望。
通过空间后方—前方交会的原理,我们可以以人类的视角来探索宇宙的奥秘。
我们可以欣赏到遥远星系的美丽,感受到宇宙的壮丽景象。
这种体验让我们感到宇宙的无限广阔和无穷魅力。
它让我们意识到人类在宇宙中的渺小,但同时也让我们认识到人类的智慧和勇气。
正是因为空间后方—前方交会的原理,我们能够以人类的视角来探索宇宙的奥秘。
这一神奇的现象让我们感受到宇宙的无限魅力,并激发了我们对宇宙的好奇心和探索欲望。
让我们一起穿越时空的奇妙旅程,去探索更多未知的宇宙奥秘。
空间前⽅交会和空间后⽅交会的区别双像解析计算的空间后交-前交⽅法当我们通过航空摄影,获得地⾯的⼀个⽴体像对时,采⽤双像解析计算的空间后交-前交⽅法计算地⾯点的空间点位。
这种⽅法⾸先由单⽚后⽅交会求出左、右像⽚的外⽅位元素,再⽤空间前⽅交会公式求出待定点坐标,其具体的作业步骤如下:(1)像⽚野外控制测量⼀个⽴体像对采⽤空间后⽅交会-前⽅交会法计算点的地⾯坐标时,像对内必须具有⼀定数量的地⾯控制点坐标。
⼀般情况下,在⼀个像对的重叠范围四个⾓上,找出四个明显地物点,在野外判识出地⾯的实际位置,并准确地在像⽚上刺出各点的位置,要求在像⽚的背⾯绘出各点与周围地物关系的点位略图,加注记说明。
然后⽤普通测量计算⽅法,求出四个控制点的地⾯坐标X, Y,Z。
(2)⽤⽴体坐标量测仪测像点的坐标像⽚在仪器上归⼼定向后,测出四个控制点的像⽚坐标(x1',y1')与(x2',y2'),然后测出所需要解求的地⾯点坐标(x1,y1)和(x2,y2)。
(3)空间后⽅交会法计算像⽚外⽅位元素利⽤控制点分别计算每个像⽚的六个外⽅位元素,包括:X S1,Y S1,Z S1,φ1,ω1,κ1,和X S2,Y S2, Z S2, φ2, ω2, κ2。
内外⽅位元素都已知:内⽅位元素3个是相机的参数,外⽅位元素6个是位姿参数:x,y,z,a,b,c,分别是位置和朝向。
其他还知道的参数是:物体在像⽚上的位置p1,p2。
p1',p2'。
直接解⽅程即可。
已知物体实际坐标,反求九参数是后⽅交会。
已知九参数,求物体坐标是前⽅交会。
那么直接求解空间前⽅交会不就完事了空间前⽅交会计算所求点的地⾯坐标1. ⽤各⾃像⽚的⾓元素,计算出左、右像⽚的旋转矩阵R1与R2。
2. 根据左、右像⽚的外⽅位线元素计算摄影基线分量BX,BY,BZ:3. 逐点计算像点的像空间辅助坐标内⽅位元素是描述摄影中⼼与像⽚之间相关位置的参数,包括三个参数,即摄影中⼼S到像⽚的垂距(主距)f及像主点在像框标坐标系中的坐标x0,y0,即f,x0,y0>>后⽅交会与相机标定的区别:⼀个是求外⽅位元素(6)个,⼀个是求内⽅位元素(3)个>>单相⽚后⽅交会和双像后⽅交会的区别:单相⽚只⽤求⼀个像⽚的位置和姿态⾓,双相⽚需要求两个像⽚的位置和姿态⾓如果位置和姿态⾓都已知了,求物体的位置,这是前⽅交会通过单张照⽚⽆法确定物⽅的位置的原因。