摄影测量学 空间前方后方交会
- 格式:docx
- 大小:236.09 KB
- 文档页数:8
单像空间后方交会名词解释
单像空间后方交会是摄影测量学中的一个重要概念,它是指利用单个影像进行地物测量和定位的方法。
在单像空间后方交会中,通过对单张影像进行分析,可以确定地面上物体的位置和形状。
这个过程涉及到对影像中的特征点进行识别和匹配,然后利用相机内外参数以及影像上的像点坐标来计算地物的三维坐标。
单像空间后方交会的过程包括以下几个步骤,首先是对影像进行预处理,包括去畸变、影像配准等操作;然后是特征点的提取和匹配,这一步是通过计算机视觉算法来实现的,可以利用角点、边缘等特征来进行匹配;接下来是相机内外参数的标定,这一步是为了将像素坐标转换为实际世界坐标而进行的;最后是利用已知的相机参数和像点坐标来计算地物的三维坐标。
单像空间后方交会在航空摄影、遥感影像解译和地图制图等领域有着广泛的应用。
它可以通过对单张影像的处理,实现对地物的测量和定位,为地理信息系统和地图制图提供了重要的数据基础。
同时,随着计算机视觉和图像处理技术的不断发展,单像空间后方交会的精度和效率也在不断提高,为各种应用领域提供了更加可靠和精确的地物信息。
摄影测量空间后方交会以单张影像空间后方交会方法,求解该像的外方位元素一、实验数据与理论基础:1、实验数据:航摄仪内方位元素f=153.24mm,x0=y0=0,以及4对点的影像坐标和相应的地面坐标:影像坐标地面坐标x(mm)y(mm)X(m)Y(m)Z(m)1-86.15-68.9936589.4125273.322195.172-53.4082.2137631.0831324.51728.693-14.78-76.6339100.9724934.982386.50410.4664.4340426.5430319.81757.312、理论基础(1) 空间后方交会是以单幅影像为基础,从该影像所覆盖地面范围内若干控制点的已知地面坐标和相应点的像坐标量测值出发,根据共线条件方程,解求该影像在航空摄影时刻的外方位元素Xs,Ys,Zs,φ,ω,κ。
(2) 每一对像方和物方点可列出2个方程,若有3个已知地面坐标的控制点,可列出6个方程,求取外方位元素改正数△Xs,△Ys,△Zs,△φ,△ω,△κ。
二、数学模型和算法公式1、数学模型:后方交会利用的理论模型为共线方程。
共线方程的表达公式为:)()()()()()(333111S A S A S A S A S A S A Z Z c Y Y b X X a Z Z c Y Y b X X a fx -+-+--+-+--=)()()()()()(333222S A S A S A S A S A S A Z Z c Y Y b X X a Z Z c Y Y b X X a fy -+-+--+-+--=其中参数分别为:κωϕκϕsin sin sin cos cos 1-=aκωϕκϕsin sin sin sin cos 2--=a ωϕcos sin 3-=aκωsin cos 1=b κωcos cos 2=b ωsin 3-=bκωϕκϕsin sin cos cos sin 1+=c κωϕκϕcos sin cos sin sin 2+-=c ωϕcos cos 3=c旋转矩阵R 为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=321321321c c c b b b a a a R2、 由于外方位元素共有6个未知数,根据上述公式可知,至少需要3个不在一条直线上的已知地面点坐标就可以求出像片的外方位元素。
《摄影测量学》课程笔记第一章绪论一、摄影测量学的基本概念1. 定义摄影测量学是一种通过分析摄影图像来获取地球表面及其物体空间位置、形状和大小等信息的科学技术。
它结合了光学、数学、计算机科学和地理信息科学等多个领域的知识,为地图制作、资源管理、环境监测和工程建设等领域提供精确的数据。
2. 分类- 地面摄影测量:使用地面上的摄影设备进行的摄影测量,适用于小范围或精细的测量工作。
- 航空摄影测量:利用飞行器(如飞机、无人机)搭载摄影设备进行的摄影测量,适用于大范围的地形测绘。
- 卫星摄影测量:通过卫星搭载的传感器获取地球表面信息,适用于全球或大区域的环境监测和资源调查。
3. 应用领域- 地图制作:制作各种比例尺的地形图、城市规划图和专题地图。
- 土地调查:进行土地分类、土地权属界定和土地使用规划。
- 城市规划:辅助城市设计和基础设施规划。
- 环境监测:监测环境变化,如森林覆盖、水资源和污染状况。
- 灾害评估:评估自然灾害的影响范围和损失。
- 军事侦察:获取敌对地区的地理信息。
二、摄影测量学的发展历程1. 早期摄影测量(19世纪中叶-20世纪初)- 1839年,法国人达盖尔发明了银版照相法,这是摄影技术的起源。
- 1851年,瑞士工程师普雷斯特勒使用摄影方法绘制了第一张地形图。
- 1859年,法国人布洛克发明了立体测图仪,使得通过摄影图像进行三维测量成为可能。
2. 现代摄影测量(20世纪初-20世纪末)- 20世纪初,德国人奥佩尔提出了像片纠正和像片定向的理论,为摄影测量学的理论基础做出了贡献。
- 1930年代,随着航空技术的发展,航空摄影测量开始广泛应用。
- 1950年代,电子计算机的出现为摄影测量数据的处理提供了新的工具。
- 1960年代,数字摄影测量开始发展,利用计算机技术进行图像处理和分析。
3. 空间摄影测量(20世纪末-至今)- 1970年代,卫星遥感技术开始应用于摄影测量,提供了全球范围内的地理信息。
空间后交—前交程序设计(实验报告)姓名:班级:学号:时间:空间后交-前交程序设计一、实验目的用 C 、VB或MATLAB语言编写空间后方交会-空间前方交会程序⑴提交实习报告:程序框图、程序源代码、计算结果、体会⑵计算结果:像点坐标、地面坐标、单位权中误差、外方位元素及其精度二、实验数据f=150。
000mm,x0=0,y0=0三、实验思路1。
利用空间后方交会求左右像片的外方位元素(1).获取m(于像片中选取两点,于地面摄影测量坐标系中选取同点,分别计算距离,距离比值即为m),x,y,f,X,Y,Z(2).确定未知数初始值Xs,Ys,Zs,q,w,k(3).计算旋转矩阵R(4).逐点计算像点坐标的近似值(x),(y)(5)。
组成误差方程式(6)。
组成法方程式(7).解求外方位元素(8)。
检查是否收敛,即将求得的外方位元素的改正数与规定限差比较,小于限差即终止;否则用新的近似值重复步骤(3)-(7)2。
利用求出的外方位元素进行空间前交,求出待定点地面坐标(1).用各自像片的角元素计算出左、右像片的方向余弦值,组成旋转矩阵R1,R2(2)。
根据左、右像片的外方位元素,计算摄影基线分量Bx,By,Bz(3)。
计算像点的像空间辅助坐标(X1,Y1,Z1)和(X2,Y2,Z2)(4).计算点投影系数N1和N2(5)。
计算未知点的地面摄影测量坐标四、实验过程⑴程序框图函数AandL%求间接平差时需要的系数%%%已知%a=像点坐标x,b=像点坐标y,f内方位元素主距%φ=q,ψ=w,κ=k%像空间坐标系X,Y,Z%地面摄影测量坐标系Xs,Ys,Zsfunction [A1,L1,A2,L2]=AandL(a,b,f,q,w,k,X,Y,Z,Xs,Ys,Zs) %%%%%%%%%%%选择矩阵元素a1=cos(q)*cos(k)—sin(q)*sin(w)*sin(k);a2=-cos(q)*sin(k)—sin(q)*sin(w)*cos(k);a3=-sin(q)*cos(w);b1=cos(w)*sin(k);b2=cos(w)*cos(k);b3=—sin(w);c1=sin(q)*cos(k)+cos(q)*sin(w)*sin(k);c2=—sin(q)*sin(k)+cos(q)*sin(w)*cos(k);c3=cos(q)*cos(w);%%%%%%%共线方程的分子分母X_=a1*(X—Xs)+b1*(Y-Ys)+c1*(Z-Zs);Y_=a2*(X-Xs)+b2*(Y—Ys)+c2*(Z-Zs);Z_=a3*(X—Xs)+b3*(Y—Ys)+c3*(Z-Zs);%%%%%%%近似值x=-f*X_/Z_;y=-f*Y_/Z_;%%%%%%%A组成L组成a11=1/Z_*(a1*f+a3*x);a12=1/Z_*(b1*f+b3*x);a13=1/Z_*(c1*f+c3*x);a21=1/Z_*(a2*f+a3*y);a22=1/Z_*(b2*f+b3*y);a23=1/Z_*(c2*f+c3*y);a14=y*sin(w)-(x/f*(x*cos(k)—y*sin(k))+f*cos(k))*cos(w);a15=-f*sin(k)—x/f*(x*sin(k)+y*cos(k));a16=y;a24=—x*sin(w)-(y/f*(x*cos(k)-y*sin(k))—f*sin(k))*cos(w);a25=-f*cos(k)-y/f*(x*sin(k)+y*cos(k));a26=-x;lx=a—x;ly=b-y;%%%%%%%%%组成一个矩阵,并返回A1=[a11,a12,a13,a14,a15,a16];A2=[a21,a22,a23,a24,a25,a26];L1=lx;L2=ly;函数deg2dms%%%%%%%%角度转度分秒function y=deg2dms(x)a=floor(x);b=floor((x-a)*60);c=(x-a—b/60)*3600;y=a+(b/100)+(c/10000);函数dms2deg%%%%%度分秒转度function y=dms2deg(x)a=floor(x);b=floor((x-a)*100);c=(x-a—b/100)*10000;y=a+b/60+c/3600;函数ok%%%%%%%%%%%%%%目的是为了保证各取的值的有效值%%xy为n*1,a为1*nfunction result=ok(xy,a)format short gi=size(xy,1);for n=1:io=xy(n)—floor(xy(n,1));o=round(o*(10^a(n)))/(10^a(n));xy(n,1)=floor(xy(n,1))+o;endformat long gresult=xy;函数rad2dmsxy%%%%求度分秒表现形式的三个外方位元素,三个角度function xydms=rad2dmsxy(xy)[a,b,c,d,e,f]=testvar(xy);d=deg2dms(rad2deg(d));e=deg2dms(rad2deg(e));f=deg2dms(rad2deg(f));xydms=[a,b,c,d,e,f]';函数spacehoujiao%%%%%%%空间后交%%% f%%输入p(2*n,1)%%像点坐标x,y,X,Y,Z,均为(n,1)function [xy,m,R]=spacehoujiao(p,x,y,f,X,Y,Z)format long;%%%%%权的矢量化,这是等精度时的,如果非,将函数参数改为PP=diag(p);%%求nj=size(X,2);%%初始化Xs=0;Ys=0;Zs=0;for n=1:jXs=Xs+X(n);Ys=Ys+Y(n);Zs=Zs+Z(n);endSx=sqrt((x(2)-x(1))^2+(y(2)—y(1))^2);%%%%两像点之间距离Sd=sqrt((X(2)-X(1))^2+(Y(2)-Y(1))^2);%%%%两地面控制点之间距离m=Sd/Sx; %%%%图像比例系数Xs=Xs/j;Ys=Ys/j;Zs=m*f+Zs/j;m0=0;q=0;w=0;k=0;i=0;a=rand(2*j,6);l=rand(2*j,1);%%%%for n=1:j[a(2*n—1,:),l(2*n—1,1),a(2*n,:),l(2*n,1)]=AandL(x(n),y(n),f,q,w,k,X(n),Y(n),Z(n),Xs,Ys,Zs);enddet=inv(a’*P*a)*transpose(a)*P*l;%%%%%%%%%循环体while 1%%%%%%%%%%%%%%%%[dXs,dYs,dZs,dq,dw,dk]=testvar(det);detXs=abs(dXs);detYs=abs(dYs);detZs=abs(dZs);detq=abs(dq);detw=abs(dw);detk=abs(dk);%%%%%%%%%if ((detXs<0。
地球科学与环境工程学院实验报告书一实习任务在LPS中采集4个控制点及两个检查点的像平面坐标及其对应物方坐标;编写空间后方前方交会的程序,利用该程序计算出相片的外方位元素,并且利用内外方位元素解算出两个检查点的物方坐标,并与LPS工作站上的对应坐标相比较。
二实验原理前方交会数学模型及公式后方交会数学模型,公式计算时使用迭代计算附源代码三实验思路及步骤利用后方交会得出两张像片各自的外方位元素1)获取已知数据:从摄影资料中插曲像片比例尺、平均航高、内方位元素以及控制点的地面摄影测量坐标及对应的像点坐标。
2)确定未知数的初始值:在竖直摄影的情况下,胶原素的初始值为0,线元素其中Zs=m*f+∑Z 41,Xs=∑X 41,Ys=∑Z 41。
3) 计算旋转矩阵R 。
4) 逐点计算像点坐标的近似值:利用共线方程。
5) 组成误差方程并法化。
6) 解求外方位元素。
7) 检查计算是否收敛。
利用解求出的外方位元素进行前方交会1) 用各自像片的角元素计算出左右像片的旋转矩阵R1和R2。
2) 根据左右像片的外方位元素计算摄影基线分量Bx,By ,Bz 。
3) 逐点计算像点的空间辅助坐标。
4) 计算投影系数。
5) 计算未知点的地面摄影测量坐标。
6) 重复以上步骤完成所有点的地面坐标的计算。
四 程序框图后方交会程序框图五计算成果由四个地面控制点求出相片外方位元素的解航向倾角:-0.00398694旁向倾角:0.00211388相片旋角:-0.067578两检查点物方坐标分别为:2001 160.561 2127.272 2002 2031.232 2185.930Point ID rX rY rZ2001 -0.8600 -2.8281 1683.90242002 1.4830 -0.0987 2.31812001 670969.5900 114812.4019 1883.9024 22002 671410.2130 123166.4213 1986.0801 2误差:2001 +0.000231 -0.000729 +0.0010822002 -0.000196 -0.000238 +0.000374六心得体会通过本次实习,对于LPS有了更深的了解,操作上也更加熟练,同时在翻译操作手册的工程中,对本专业设计到的某些词汇有了初步的掌握在编写后方交会的程序过程中,对空间后方-前方交会的算法认识的更加深刻,对迭代计算的步骤也更加熟悉。
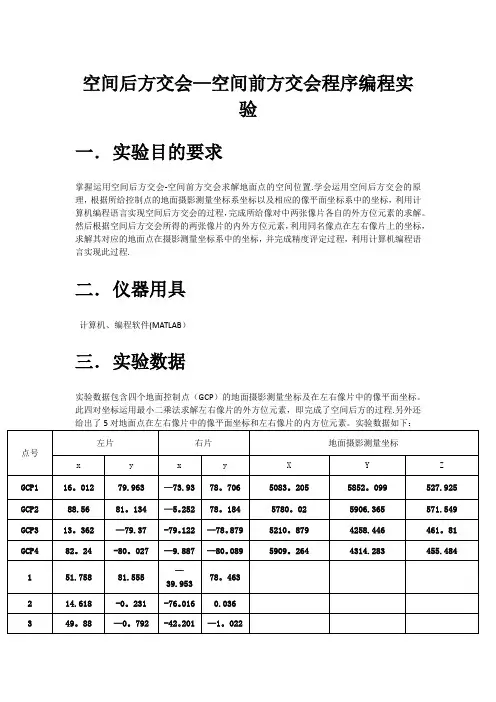
空间后方交会—空间前方交会程序编程实验一.实验目的要求掌握运用空间后方交会-空间前方交会求解地面点的空间位置.学会运用空间后方交会的原理,根据所给控制点的地面摄影测量坐标系坐标以及相应的像平面坐标系中的坐标,利用计算机编程语言实现空间后方交会的过程,完成所给像对中两张像片各自的外方位元素的求解。
然后根据空间后方交会所得的两张像片的内外方位元素,利用同名像点在左右像片上的坐标,求解其对应的地面点在摄影测量坐标系中的坐标,并完成精度评定过程,利用计算机编程语言实现此过程.二.仪器用具计算机、编程软件(MATLAB)三.实验数据实验数据包含四个地面控制点(GCP)的地面摄影测量坐标及在左右像片中的像平面坐标。
此四对坐标运用最小二乘法求解左右像片的外方位元素,即完成了空间后方的过程.另外还给出了5对地面点在左右像片中的像平面坐标和左右像片的内方位元素。
实验数据如下:内方位元素:f=152。
000mm,x0=0,y0=0 四.实验框图此过程完成空间后方交会求解像片的外方位元素,其中改正数小于限差(0。
00003,相当于0。
1'的角度值)为止。
在这个过程中采用迭代的方法,是外方位元素逐渐收敛于理论值,每次迭代所得的改正数都应加到上一次的初始值之中。
在空间后方交会中运用的数学模型为共线方程确定Xs,Ys,Zs的初始值时,对于左片可取地面左边两个GCP的坐标的平均值作为左片Xs 和Ys的初始值,取右边两个GCP的坐标平均值作为右片Xs 和Ys的初始值。
Zs可取地面所有GCP的Z坐标的平均值再加上航高.空间前方交会的数学模型为:五.实验源代码function Main_KJQHFJH()global R g1 g2 m G a c b1 b2;m=10000;a=5;c=4;feval(@shuru);%调用shuru()shurujcp()函数完成像点及feval(@shurujcp);%CCP有关数据的输入XYZ=feval(@MQZqianfangjh); %调用MQZqianfangjh()函数完成空间前方、%%%%%% 单位权中误差%%%%%后方交会计算解得外方位元素global V1 V2;%由于以上三个函数定义在外部文件中故需VV=[]; %用feval()完成调用过程for i=1:2*cVV(i)=V1(i);VV(2*i+1)=V2(i);endm0=sqrt(VV*(VV’)/(2*c-6));disp('单位权中误差m0为正负:’);disp(m0); %计算单位权中误差并将其输出显示输入GCP像点坐标及地面摄影测量坐标系坐标的函数和输入所求点像点坐标函数:function shurujcp()global c m;m=input(’摄影比例尺:');%输入GCP像点坐标数据函数并分别将其c=input('GCP的总数=');%存入到不同的矩阵之中disp('GCP左片像框标坐标:');global g1;g1=zeros(c,2);i=1;while i<=cm=input('x=');n=input('y=');g1(i,1)=m;g1(i,2)=n;i=i+1;enddisp('GCP右片像框标坐标:’);global g2;g2=zeros(c,2);i=1;while i〈=cm=input('x=’);n=input('y=’);g2(i,1)=m;g2(i,2)=n;i=i+1;end%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function shuru()global a;a=input('计算总像对点数='); %完成想计算所需的像平面坐标global b1;%坐标输入,存入不同的矩阵中b1=zeros(a,2);disp('左片像点坐标:')i=1;while i〈=am=input('x=’);n=input(’y=’);b1(i,1)=m;b1(i,2)=n;i=i+1;end%%global b2;b2=zeros(a,2);disp(’右片像点坐标:')i=1;while i〈=am=input('x=’);n=input('y=’);b2(i,1)=m;b2(i,2)=n;i=i+1;end%%global c;c=input(’GCP的总数=');disp('GCP摄影测量系坐标:’)global G;G=zeros(3,c);i=1;while i〈=cm=input(’X=');n=input(’Y=');v=input(’Z=');G(i,1)=m;G(i,2)=n;G(i,3)=v;i=i+1;end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%空间前方交会和后方交会函数:function XYZ=MQZqianfangjh()global R1 R2 a f b1 b2 Ra Rb;global X1 X2;R1=Ra;R2=Rb;R1=zeros(3,3);R2=zeros(3,3);global g1 g2 G V1 V2 V WF c QXX QXX1 QXX2;xs0=(G(1,1)+G(3,1))/2;ys0=(G(1,2)+G(3,2))/2;[Xs1,Ys1,Zs1,q1,w1,k1 R]=houfangjh(g1,xs0,ys0);%对左片调用后方交会函数R1=R;V1=V;WF1=WF;QXX1=QXX;save '左片外方位元素为。
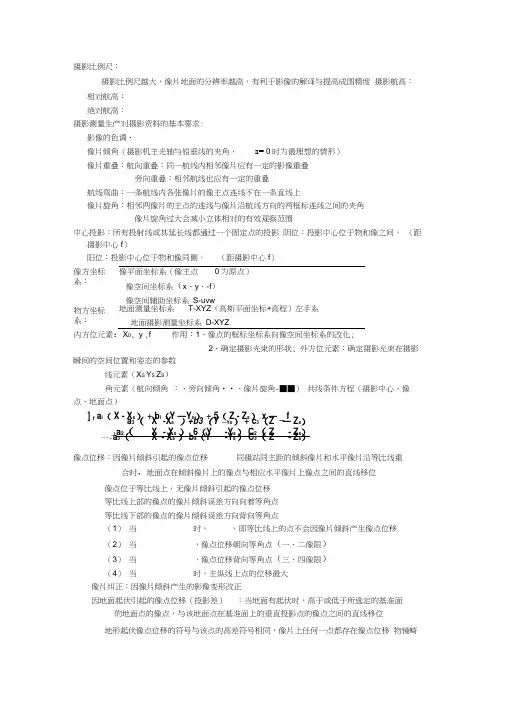
摄影比例尺:摄影比例尺越大,像片地面的分辨率越高,有利于影像的解译与提高成图精度 摄影航高: 相对航高:绝对航高:摄影测量生产对摄影资料的基本要求:影像的色调、像片倾角(摄影机主光轴与铅垂线的夹角, a= 0时为最理想的情形)像片重叠:航向重叠:同一航线内相邻像片应有一定的影像重叠旁向重叠:相邻航线也应有一定的重叠航线弯曲:一条航线内各张像片的像主点连线不在一条直线上像片旋角:相邻两像片的主点的连线与像片沿航线方向的两框标连线之间的夹角像片旋角过大会减小立体相对的有效观察范围中心投影:所有投射线或其延长线都通过一个固定点的投影 阴位:投影中心位于物和像之间。
(距摄影中心f )阳位:投影中心位于物和像同侧。
(距摄影中心f ) 像方坐标系: 像平面坐标系(像主点 0为原点) 像空间坐标系(x 、y 、-f )像空间辅助坐标系 S-uvw物方坐标系: 地面测量坐标系 T-XYZ (高斯平面坐标+高程)左手系地面摄影测量坐标系 D-XYZ内方位元素:X 0, y °,f作用:1、像点的框标坐标系向像空间坐标系的改化;2、确定摄影光束的形状; 外方位元素:确定摄影光束在摄影瞬间的空间位置和姿态的参数线元素(X S Y S Z S )角元素(航向倾角 :、旁向倾角••、像片旋角-■■) 共线条件方程(摄影中心、像点、地面点)] f a i ( X - X s ) + b i (Y —Y s ) + 5( Z - Z s ) x — _ f a 3( X -X s )+b 3(Y —Ys ) + c 3(Z — Z s )_fa 2( X - X s ) 6(Y -Y s ) C 2( Z - Z s ) 一-a 3( X - X s )b s (Y -Y s ) C 3( Z - Z s ) 像点位移:因像片倾斜引起的像点位移 同摄站同主距的倾斜像片和水平像片沿等比线重合时,地面点在倾斜像片上的像点与相应水平像片上像点之间的直线移位像点位于等比线上,无像片倾斜引起的像点位移等比线上部的像点的像片倾斜误差方向向着等角点等比线下部的像点的像片倾斜误差方向背向等角点(1) 当时, ,即等比线上的点不会因像片倾斜产生像点位移 (2) 当,像点位移朝向等角点(一、二像限) (3) 当,像点位移背向等角点(三、四像限) (4) 当 时,主纵线上点的位移最大像片纠正:因像片倾斜产生的影像变形改正因地面起伏引起的像点位移(投影差) :当地面有起伏时,高于或低于所选定的基准面的地面点的像点,与该地面点在基准面上的垂直投影点的像点之间的直线移位地形起伏像点位移的符号与该点的高差符号相同,像片上任何一点都存在像点位移 物镜畸变、大气折光、地球曲率及底片变形等一些因素均会导致像点位移航摄像片:中心投影,平均比例尺,影像有变形,方位发生变化地形图:正射投影,比例尺固定,图形形状与实地完全相似,方位保持不变在表示方法上:地形图是按成图比例尺,用各种规定的符号、注记和等高线表示地物地貌;航片则是通过影像的大小、形状和色调表示。
单像空间后方交会实习报告单像空间后方交会实习报告一、引言空间后方交会是摄影测量学中的一项重要内容,它能通过对已知控制点的旁边影像进行分析和计算,确定未知控制点的空间坐标,这在地图制作、城市规划、工程测量等领域有着广泛的应用。
本次实习旨在通过实际操作掌握空间后方交会的方法和技巧,进一步加深对摄影测量学的理解,并提升实际操作能力。
二、实习目的1. 学习空间后方交会的理论知识,了解其基本原理和计算方法。
2. 掌握使用数字相机采集控制点及待测控制点影像的技巧。
3. 熟练使用后方交会软件进行影像的处理和计算,得到待测控制点的空间坐标。
4. 分析实际数据的精度和误差,评估后方交会结果的可靠性。
三、实习过程1. 准备工作在实习开始前,我们需要准备好数字相机、相机标定板以及控制点和待测控制点的影像。
同时还需要安装并熟悉后方交会软件,以便后续处理和计算。
2. 影像采集首先,在实地选取控制点和待测控制点,并采用全站仪等测量仪器获取其地面坐标。
接着,通过相机标定板进行相机标定,获取相机内外参数。
然后,使用数字相机对控制点和待测控制点进行影像采集。
为了减小误差,我们要保证相机的光心与全站仪的标尺中心对准,并使用三脚架固定相机。
3. 影像的处理和计算将采集到的影像导入到后方交会软件中,根据相机内外参数和控制点的地面坐标,进行畸变校正和像点坐标的提取。
接下来,通过自动或手动方法选取控制点和待测控制点进行像点匹配。
通过匹配的像点坐标和已知控制点的地面坐标,利用后方交会公式进行计算,得到待测控制点的空间坐标。
4. 结果分析和评估对得到的结果进行精度分析,并评估其可靠性。
通过对比实测控制点的地面坐标与计算得到的空间坐标,计算精度检查,进一步评估后方交会结果的准确性。
同时,还要检查影像的质量和匹配的像点之间的差异,排除控制点标定、像点提取或匹配过程中出现的问题。
四、实习总结通过这次实习,我对空间后方交会的理论知识和实际操作有了更深入的了解。
1摄影测量学2航向重叠3单像空间后方交会4相对行高5像片纠正6解析空中三角测量7透视平面旋转定律8外方位元素9核面10绝对定向元素一、填空1摄影测量的基本问题,就是将 _________ 换为__________ 。
2物体的色是随着 _________ 光谱成分和物体对光谱成分固有不变的__________ 、________ 和_________ 的能力而定的03人眼产生天然立体视觉的原因是由于 _________ 的存在°4相对定向完成的标志是 _________5光束法区域网平差时,若像片按垂直于航带方向编号,则改化法方程系数阵带宽为______ 若按平行于航带方向编号,则带宽为_____________三、简答题1两种常用的相对定向元素系统的特点及相对定向元素。
2倾斜位移的特性。
3单行带法相对定向后,为何要进行比例尺归化?为何进行?4独立模型法区域网平差基本思想。
5何谓正形变换?有何特点?四、论述题1空间后方交会的结算步骤。
2有三条航线,每条航线六张像片组成一个区域,采用光束法区域网平差。
(1)写出整体平差的误差方程式的一般式。
(2)将像片进行合理编号,并计算带宽,内存容量(3)请画出改化法方程系数阵结构简图。
A卷答案:、1是对研究的对象进行摄影,根据所获得的构想信息,从几何方面和物理方面加以分析研究,从而对所摄影的对象本质提供各种资料的一门学科。
2供测图用的航测相片沿飞行方向上相邻像片的重叠。
3知道像片的内方位元素,以及三个地面点坐标和量测出的相应像点的坐标,就可以根据共线方程求出六个外方位元素的方法。
4摄影瞬间航摄飞机相对于某一索取基准面的高度。
5将中心投影转换成正射投影时,经过投影变换来消除相片倾斜所引起的像点位移,使它相当于水平相片的构象,并符合所规定的比例尺的变换过程。
6是将建立的投影光束,单元模型或航带模型以及区域模型的数字模型,根据少数地面控制点,按最小二乘法原理进行平差计算,并求加密点地面坐标的方法。
地球科学与环境工程学院实验报告书
一实习任务
在LPS中采集4个控制点及两个检查点的像平面坐标及其对应物方坐标;编写空间后方前方交会的程序,利用该程序计算出相片的外方位元素,并且利用内外方位元素解算出两个检查点的物方坐标,并与LPS工作站上的对应坐标相比较。
二实验原理
前方交会数学模型及公式
后方交会数学模型,公式
计算时使用迭代计算
附源代码
三实验思路及步骤
利用后方交会得出两张像片各自的外方位元素
1)获取已知数据:从摄影资料中插曲像片比例尺、平均航高、内方位元素以及控制点的地面摄影测量坐标及对应的像点坐标。
2)确定未知数的初始值:在竖直摄影的情况下,胶原素的初始值
为0,线元素其中Zs=m*f+∑Z 41,Xs=∑X 41,Ys=∑Z 4
1。
3) 计算旋转矩阵R 。
4) 逐点计算像点坐标的近似值:利用共线方程。
5) 组成误差方程并法化。
6) 解求外方位元素。
7) 检查计算是否收敛。
利用解求出的外方位元素进行前方交会
1) 用各自像片的角元素计算出左右像片的旋转矩阵R1和R2。
2) 根据左右像片的外方位元素计算摄影基线分量Bx,By ,Bz 。
3) 逐点计算像点的空间辅助坐标。
4) 计算投影系数。
5) 计算未知点的地面摄影测量坐标。
6) 重复以上步骤完成所有点的地面坐标的计算。
四 程序框图
后方交会程序框图
五计算成果
由四个地面控制点求出相片外方位元素的解航向倾角:-0.00398694
旁向倾角:0.00211388
相片旋角:-0.067578
两检查点物方坐标分别为:
2001 160.561 2127.272 2002 2031.232 2185.930
Point ID rX rY rZ
2001 -0.8600 -2.8281 1683.9024
2002 1.4830 -0.0987 2.3181
2001 670969.5900 114812.4019 1883.9024 2
2002 671410.2130 123166.4213 1986.0801 2
误差:2001 +0.000231 -0.000729 +0.001082
2002 -0.000196 -0.000238 +0.000374
六心得体会
通过本次实习,对于LPS有了更深的了解,操作上也更加熟练,同时在翻译操作手册的工程中,对本专业设计到的某些词汇有了初步的掌握
在编写后方交会的程序过程中,对空间后方-前方交会的算法认识的更加深刻,对迭代计算的步骤也更加熟悉。