阵列信号处理作业
- 格式:doc
- 大小:141.50 KB
- 文档页数:9
阵列信号处理(Array Signal Processing)1. 简介阵列信号处理是一种利用多个传感器或微phones接收到的信号进行处理的技术。
这些传感器通常以阵列的形式排列在一起,可以在空间上对信号进行采样。
阵列信号处理技术可以用于各种应用,包括无线通信、雷达、声音定位和语音增强等领域。
在阵列信号处理中,经常会使用到点扩散函数(Point Spread Function,PSF)和反卷积(Deconvolution)等概念。
本文将详细介绍这些特定函数的定义、用途和工作方式。
2. 点扩散函数(Point Spread Function,PSF)2.1 定义点扩散函数(PSF)是指在观察到一个点源时,系统输出的响应。
点源可以是一个理想的点光源、点声源或点热源等。
PSF描述了系统对于一个点源的感知能力,可以用于评估系统的分辨率和信号传输特性。
2.2 用途PSF在阵列信号处理中具有广泛的应用,主要用于以下几个方面:2.2.1 分辨率评估PSF可以用于评估系统的分辨率,即系统能够分辨并显示的最小特征尺寸。
通过分析PSF的形状和尺寸,可以确定系统的分辨率限制,进而优化系统设计和参数设置。
2.2.2 反卷积PSF还可以用于图像或信号的反卷积处理。
在实际应用中,由于传感器和系统的限制,观测到的信号往往受到模糊和失真的影响。
通过将观测到的信号与PSF进行卷积运算的逆过程,可以恢复出原始信号的更清晰的图像或声音。
2.2.3 信号重构PSF在阵列信号处理中也可以用于信号重构。
通过对多个传感器接收到的信号进行处理和分析,可以利用PSF将信号的不同成分分离出来,从而实现信号的重构和定位。
2.3 工作方式PSF的工作方式可以通过以下几个步骤来理解:2.3.1 系统建模首先,需要对阵列系统进行建模。
这包括确定阵列的几何结构、传感器的位置和响应特性等。
通过建模,可以得到系统的传递函数,即系统对于输入信号的响应。
2.3.2 点源输入接下来,将一个点源输入到系统中,观察系统的输出。
宽带信号中的三种二维平面阵DOA估计宽带信号中的三种二维平面阵DOA 估计一. 背景目前关于阵列窄带信号的高分辨算法已比较成熟,但是随着信号处理技术的发展,信号环境日趋复杂,信号形式多样,信号密度日渐增大,窄带阵列探测系统的确定逐渐显示出来。
由于宽带信号具有目标回波携带的信息量大,有利于目标探测、参量估计和目标特征提取等特点,在有源探测系统中越来越多地得到应用。
而在无源探测系统中,利用目标辐射的宽带连续谱进行目标检测是有效发现目标的一种重要手段。
ISM 方法把宽带信号在频域分解为J 个窄带分量,然后在每一个子带上直接进行窄带处理。
因为信号为调频信号,所以信号在时域的分段实际上就是频域的分段。
将信号分解为窄带信号后,我们就可以利用窄带算法进行处理,最后将各个结果进行加权综合,即可得到最终的结果。
二维DOA 估计是阵列信号处理中的重要内容,通过二维DOA 估计可以得到信号源在平面中的角度信息。
一般采用L 型、面阵和平行阵或矢量传感器实现二维参数的估计,多数有效的二维DOA 估计算法是在一维DOA 估计的基础上,直接针对空间二维谱提出的,如二维MUSIC 算法以及二维CAPON 算法等。
这两种算法可以产生渐进无偏估计,但要在二维参数空间搜索谱峰,计算量相当大。
而采用二维ROOT MUSIC 算法可以减小计算量,但是需要付出精度下降的代价。
本次报告将结合宽带信号和二维DOA 估计算法,进行相关的算法介绍和仿真。
二. 算法介绍1. 接收信号模型:图 1 平面阵列示意图如图1所示,设平面阵元数为M ×N ,信源数为K 。
信源的波达方向为11(,),,(,)k k θφθφ ,第i 个阵元与参考阵元之间的波程差为:2(cos sin sin sin cos )/i i i x y z βπφθφθθλ=++设子阵1沿x 轴的方向矩阵为x A ,而子阵2的每个阵元相对于参考阵元的波程差就等于子阵1的阵元的波程差加上2sin sin /d πφθλ,所以接收信号为121()()()y x y x y M x A D A A D A X S N A D A -⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎣⎦协方差矩阵为H H H s s s n n n R XX E D E E D E ==+其中,s D 代表由最大的K 个特征值构成的一个K ×K 对角阵,n D 代表由MN-k 个较小的特征值构成的对角矩阵, s E 和n E 分别代表由s D 和n D 对应的特征值构成的特征矢量。
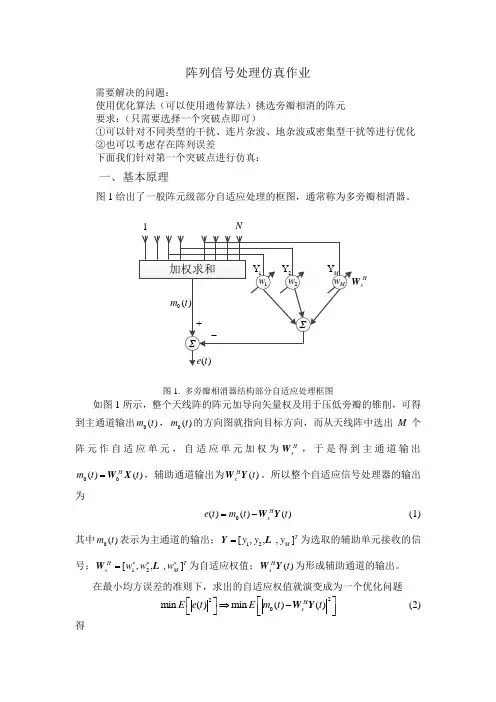
阵列信号处理仿真作业需要解决的问题:使用优化算法(可以使用遗传算法)挑选旁瓣相消的阵元 要求:(只需要选择一个突破点即可)①可以针对不同类型的干扰、连片杂波、地杂波或密集型干扰等进行优化 ②也可以考虑存在阵列误差下面我们针对第一个突破点进行仿真:一、基本原理图1给出了一般阵元级部分自适应处理的框图,通常称为多旁瓣相消器。
1NHx图1. 多旁瓣相消器结构部分自适应处理框图如图1所示,整个天线阵的阵元加导向矢量权及用于压低旁瓣的锥削,可得到主通道输出0()m t ,0()m t 的方向图就指向目标方向,而从天线阵中选出M 个阵元作自适应单元,自适应单元加权为H x W ,于是得到主通道输出00()()H m t t =W X ,辅助通道输出为()H x t W Y 。
所以整个自适应信号处理器的输出为0()()()H x e t m t t =-W Y(1)其中0()m t 表示为主通道的输出;12[,,,]T M y y y =Y L 为选取的辅助单元接收的信号;12[,,,]H Tx M w w w ***=W L 为自适应权值;()H x t W Y 为形成辅助通道的输出。
在最小均方误差的准则下,求出的自适应权值就演变成为一个优化问题220min ()min ()()H x E e t E m t t ⎡⎤⎡⎤⇒-⎢⎥⎣⎦⎣⎦W Y (2)得10()()()()H H xE t t E t m t -*⎡⎤⎡⎤=⎣⎦⎣⎦WY Y Y(3)为了保证目标信号不损失,应对自适应权作约束,约束条件是在目标信号的方向上,阵列自适应处理的增益为一常数。
即在权值调整过程中,无论权x W 怎样变化,对有用信号的增益不变。
这样在使自适应阵输出()e t 的均方值2()E e t ⎡⎤⎣⎦最小时,能最大限度地抑制干扰且不损失有用信号能量。
图1中应用式( 2) 的无约束优化方程显然不合理,它不能保证有用信号增益不变。
阵列接收信号处理流程一、信号接收阵列接收信号处理的第一步是信号接收。
在阵列中,有多个接收器同时接收信号。
这些接收器可以是天线、传感器或其他接收设备。
每个接收器都可以独立地接收到信号,并将信号传输到后续的信号处理单元。
二、信号预处理接收到的信号可能会受到噪声、干扰或其他不完美因素的影响,因此需要进行信号预处理。
信号预处理的目的是提高信号的质量和准确性。
常见的信号预处理方法包括滤波、增益控制、噪声消除和时序校正等。
滤波是信号预处理的一种常用方法。
通过滤波可以去除信号中的噪声和干扰,提高信号的清晰度和可辨识度。
常见的滤波方法有低通滤波、高通滤波和带通滤波等。
增益控制是调整信号强度的方法。
通过增益控制可以使信号的强度达到最佳状态,避免信号过强或过弱的问题。
噪声消除是去除信号中噪声成分的方法。
噪声是信号中的不完美因素,可能会干扰信号的质量和准确性。
通过噪声消除可以提高信号的清晰度和准确性。
时序校正是调整信号的时序关系的方法。
在多个接收器同时接收信号时,由于信号传输路径的不同,信号到达各个接收器的时间可能存在微小的差异。
通过时序校正可以使信号的时序关系达到一致,提高信号的同步性和准确性。
三、信号合并经过信号预处理后,接收到的信号可以进行合并。
信号合并是将多个接收器接收到的信号进行综合和整合的过程。
通过信号合并可以提高信号的强度和准确性,增加信号的可靠性和鲁棒性。
常见的信号合并方法有加权平均法、最大比例合并法和最大比例合并法等。
加权平均法是将每个接收器接收到的信号按照一定的权重进行加权平均,得到综合的信号。
最大比例合并法是选择接收到信号强度最大的接收器的信号作为综合的信号。
最大比例合并法是根据接收到信号的强度比例进行综合,提高信号的强度和准确性。
四、信号解调和解码信号合并后,接下来需要进行信号的解调和解码。
信号解调是将调制信号转化为原始信号的过程。
常见的调制方式有频率调制、相位调制和振幅调制等。
通过信号解调可以恢复出原始信号的特征和信息。
![[论文]阵列信号处理实验报告](https://uimg.taocdn.com/f846eb3caf45b307e8719749.webp)
作业一 在球坐标系下推导平面波表达式球面波波动方程:22222222()E E x y z tεμ∂∂∂∂++=∂∂∂∂ 将直角坐标与球坐标的关系带入得到:22222222221111()(sin )sin sin s s sr r r r r r c tθθθθθϕ∂∂∂∂∂∂++=∂∂∂∂∂∂ 应用球面波方程一般都是球对称的,简化为:2222211()s sr r r r c t∂∂∂=∂∂∂ 经过变化,可得:222221rs rsr c t ∂∂=∂∂ 该方程的一个解为:exp[()As j t kr rω=- 同样有如下关系:/k c ω=根据平面波的定义,在球坐标系下,单频平面波的表达式为:(,)exp[()]As r t j t k r rω=-⋅作业二对于有限孔径的感应器,某一感应器接收的信号可以表示为:(,)()(,)z x t w x f x t =其中()w x 为窗函数。
通过空间傅立叶变换可得:()()exp()W k w x jk x dx ∞-∞=⋅⎰(,)(,)exp[()F k f x t j t k x dxdt ωω∞∞-∞-∞=--⋅⎰⎰对接收信号(,)z x t 进行傅立叶变换:()()()()[]()()()(){}()(),,exp[(),exp exp ,exp ,exp exp ,exp exp o Z k z x t j t k x dxdtw x f x t j t jk x dxdtw x F x jk x dxw x F l jl x dl jk x dx w x F l jl x jk ωωωωωω∞∞-∞-∞∞∞-∞-∞∞-∞∞∞-∞-∞∞∞-∞-∞=--⋅⎡⎤=-⋅⎣⎦⎡⎤=⋅⎣⎦⎡⎤⎡⎤=-⋅⋅⎣⎦⎣⎦⎡⎤=-⋅⋅⎣⎦⎰⎰⎰⎰⎰⎰⎰⎰⎰()()(){}()(),exp ,x dldxF l w x j k l x dx dlW k l F l dlωω∞∞-∞-∞∞-∞⎡⎤⎣⎦⎡⎤=-⋅⎣⎦=-⎰⎰⎰ 其中,()()[],,exp o F x f x t j t dt ωω∞-∞=-⎰。
某阵列雷达信号处理题目要求某阵列雷达位包括20个天线单元的等距线阵(水平位置),天线间隔0.65m ,波长为1.25m 。
采用LFM 信号,调频带宽B=800kHz ,脉冲宽度Te=400us );雷达为三变T ,脉冲重复周期分别为[4100,4300,4500]us 。
对基带复信号的采样时钟为1us 。
在一个波位发射的脉冲数为12。
假设两个目标的距离分别为80km 和200km ,速度分别为300m/s 和200m/s ,方位分别为0°和1°(相对于阵列的法线方向),信噪比均为-10dB 。
在100km 内均存在地杂波,杂波的速度谱宽为0.42m/s ,杂噪比为60dB 。
该雷达的信号处理流程如下图所示,对回波信号一次进行DBF 、脉压、MTI 、非相干积累CFAR 等处理。
处理步骤程序中使用到数据文件:radar_data.mat ,为三维数组3000 × 20 × 12,3000为距离单元,20为天线单元数,12为一个波位的脉冲数。
接下来要对数据依次进行DBF 、脉压、MTI 、CFAR 等处理。
1. 首先给出第一个PRT 内的时域回波信号,可以看出到前面1000点左右的距离门都有明显的杂波。
然后给出波束指向为0°时的DBF 处理结果,采用泰勒窗进行加权,程序中控制加权的旁瓣电平为-30dB 满足题目要求。
120140160180p l i t u d e /d BDBF result on 0 degree DBF 通道1通道2通道20...脉压MTI 非相干积累检测0100020003000406080100120140160Range GateA m p l i t u d e /d BEcho in time zone2. 下图给出脉压后的原始视频,要求副瓣<-35dB 。
(LFM 信号: B=800KHz ,Te=420us )程序中控制所加的泰勒窗旁瓣电平为-36dB ,脉压过后取出了前暂态点,得到右下方的脉压结果。
信号子空间:设N 元阵接收p 个信源,则其信号模型为:()()()()1piiii x t s t a N t θ==+∑在无噪声条件下,()()()()()12,,,P x t span a a a θθθ∈L称()()()()12,,,P span a a a θθθL 为信号子空间,是N 维线性空间中的P 维子空间,记为P N S 。
PN S 的正交补空间称为噪声子空间,记为N P N N -。
正交投影设子空间m S R ∈,如果线性变换P 满足,()1),,,2),,,0m mx R Px S x S Px x x R y S x Px y ∀∈∈∀∈=∀∈∀∈-=且则称线性变换P 为正交投影。
导向矢量、阵列流形设N 元阵接收p 个信源,则其信号模型为:()()()()1piiii x t s t a N t θ==+∑,其中矢量()i ia θ称为导向矢量,当改变空间角θ,使其在空间扫描,所形成的矩阵称为阵列流形,用符号A 表示,即(){|(0,2)}a A θθπ=∈波束形成波束形成(空域滤波)技术与时间滤波相类似,是对采样数据作加权求和,以增强特定方向信号的功率,即()()()()HHy t W X t s t W a θ==,通过加权系数W 实现对θ的选择。
最大似然已知一组服从某概率模型()f X θ的样本集12,,,N X X X K ,其中θ为参数集合,使条件概率()12,,,N f X X X θK 最大的参数θ估计称为最大似然估计。
不同几何形态的阵列的阵列流形矢量计算问题假设有P 个信源,N 元阵列,则先建立阵列的几何模型求第i 个信源的导向矢量()i i a θ 选择阵元中的一个作为第一阵元,其导向矢量()1[1]i a θ=然后根据阵列的几何模型求得其他各阵元与第一阵元之间的波程差n ∆,则确定其导向矢量()2jn i a eπλθ∆=最后形成N 元阵的阵列流形矢量()11221N j j N Pe A e πλπλθ-∆∆⨯⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦M 例如各向同性的NxM 元矩形阵,阵元间隔为半个波长,当信源与阵列共面时:首先建立阵列几何模型:对于第m 行、第n 列的阵元,其与第1行、第1列阵元之间的波程差为(1)sin()(1)cos()mn i i n d m d θθ∆=---故:()1122(sin()cos())22((1)sin()(1)cos())11N j j d j j d N M NM P NM Pe e A e e ππθθλλππθθλλθ-∆-∆---⨯⨯⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦M M而当信源与阵列不共面时: 首先将信源投影到阵列平面然后建立阵列模型对于第m 行、第n 列的阵元,其与第1行、第1列阵元之间的波程差为[(1)sin()(1)cos()]sin()mn i i i n d m d θθϕ∆=-+-故:()1122(sin()cos())cos()22((1)sin()(1)cos())cos()11N j j d j j d N M NM P NM Pe e A e e ππθθϕλλππθθϕλλθ-∆-∆---⨯⨯⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦M M线性约束最小方差准则(LCMV )的自适应波束形成算法: 对于信号模型:()()()0X t s t a J N θ=++, 波束形成输出:()()()()0()H H H yt W X t s t W a W J N θ==++LCMV 准则实际上是使()0HW a θ为一个固定值的条件下,求取使得()HWJ N +方差最小的W 作为最有权值,即:()0min .H X W HW R Ws t W a Fθ⎧⎪⎨⎪=⎩,其中F 为常数利用拉格朗日乘子法可解得:()10X opt W R a μθ-=当取1F =时,则()()11H X a R a μθθ-=,μ的取值不影响SNR 和方向图。
阵列信号处理作业(下周五6月8号的阵列信号处理课上交,纸质的,可以手写也可以打印)1 设空间有M 个感应器,每个感应器所接收到的信号和噪声表示为:)()()(t n t s t y m m +=,其中m=0,1,……,M-1,s(t)为信号,是确定量,n m (t)为噪声,是随机量,且均值为零。
对所接收的信号进行空间平均,请确定阵列输出的信噪比与单感应器输出的信噪比相比,增加多少?分两种情况考虑 (1)噪声是互不相关的,即{}210)()(21m m t n t n E m m ≠=; (2)噪声是相关的,即 {}210)()(21m m t n t n E m m ≠≠。
解:(1)设L 为子阵长度 ,N=M-L+1为子阵数,S(t)=A 0jw te,则()0010011()(),,()()x j w t k M d jw t M M y t Ae n t y t Aen t --⎡⎤⎣⎦--=+=+天线加权为[]011,,,L W w w w -=,子天线阵接收到的信号为12,,,N Y Y Y 。
第1个子阵相关矩阵111HR YY =,其中信号相关矩阵1s R 和噪声相关矩阵1n R 为(1)1(1)111x x x x jk djk L d jk ds jk L d L L e e e R e----⨯⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦ **00011**1011L n L L L L Ln n n n R n n n n ----⨯⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦第2个子阵相关矩阵222H R Y Y =,其中信号相关矩阵2s R 和噪声相关矩阵2n R 为(1)2(1)111x x x x jk d jk L d jk ds jk L d L L e e e R e----⨯⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦ **1112**1L n L L L L Ln n n n R n n n n ⨯⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦第N 个子阵相关矩阵H N N N R Y Y =,其中信号相关矩阵Ns R 和噪声相关矩阵Nn R 为(1)(1)111x x x x jk d jk L d jk dNs jk L d L L e e e R e----⨯⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦ **111**1N N N M Nn M N M ML Ln n n n R n n n n ----⨯⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ 对相关矩阵进行空间平均有111111N N Nk ks kn k k k R R R R N N N =====+∑∑∑,令1111,N Ns ks n kn k k R R R R N N ====∑∑,则(1)(1)111x x x x jk d jk L d jk d s jk L d L L e e e R e ----⨯⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦ 又因为{}122012()()12m m m m E n t n t m m σ≠⎧=⎨=⎩,所以222000000n L L R σσσ⨯⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦ 阵列输出信号功率为2102)(⎥⎦⎤⎢⎣⎡==∑-=L i H s s m w A W WR P阵列输出噪声功率为∑-==122)(L m n m w P σ感应器输出的信号功率为222')()()(m w A t w t s P s ==感应器输出的噪声功率为22')(t w P n σ=所以,阵列增益为∑∑-=-=⎪⎭⎫ ⎝⎛==12210'')()(L m L m nsn s m w m w P P P P G(2)当噪声相关时,设{}212212()()12m m m m E n t n t m m ρσσ⎧≠=⎨=⎩,其中ρ为相关系数,且01ρ<≤。
阵列信号处理课程2011年作业第1题假定半波长间隔均匀分布线列阵的阵元数N =16,若入射平面波为62.5Hz 的正弦信号,信号持续时间为0.4s ,系统采样频率为1kHz ,阵列加权方式为均匀加权。
分别给出1. 当平面波信号分别从0,10, 20, 30, 40, 50, 60, 70, 80, 90, 100度方向入射时,指向90度的波束形成器的输出序列。
2. 当平面波信号分别从0:1:180度方向入射时,指向90度的波束形成器的输出序列经过平方求和后的分贝数输出。
(把所有181个输出绘制在同一幅图中) 1)仿真图图一:所求角度入射信号输出序列三维表示注:1. θ为信号入射角度,取值从0度到100度,每10°为一个间隔;2. T 为整个阵元采样时间,对于不同的入射角度,t 的取值范围不同;3.输出信号幅度表示所有阵元的求和输出幅度,为有噪声情况。
结论:204060800.20.40.60.8t输出信号幅度从图一可以看出:①从90°入射的信号输出序列没有得到衰减,而其它角度入射的都得到了衰减;②从100°入射的信号和从80°入射的信号输出序列关于90°方向是对称的;③整个阵列对噪声有很好的抑制作用。
图二:入射信号0°到50°的输出序列图三:入射信号60°到100°的输出序列结论:从图二和图三可以看出:①图一的所有结论;②90°方向入射信号没-0.1-0.0500.050.1tA m p l i t u d e0。
-0.1-0.0500.050.1 tA m p l i t u d e10。
0.10.20.30.40.5-0.2-0.100.10.2 tA m p l i t u d e20。
0.10.20.30.40.5-0.1-0.0500.050.1 tA m p l i t u d e30。
0.10.20.30.40.5-0.1-0.0500.050.1 tA m p l i t u d e40。
0.10.20.30.40.5-0.1-0.0500.050.1 tA m p l i t u d e50。
0.10.20.30.40.5tA m p l i t u d e60。
0.10.20.30.4t A m p l i t u d e70。
0.10.20.30.4t A m p l i t u d e80。
0.10.20.30.4tA m p l i t u d e90。
tA m p l i t u d e100。
有时延,0°方向入射信号时延最长;③在不同角度,信号衰减倍数不同。
图四:所求角度输出序列分贝数结论:从图四可以看出:①从90°方向入射的信号输出序列分贝数最大,高出旁瓣近13dB ;②整个图形关于90°方向对称。
2)仿真程序clear all; close all; clc%%以最先有信号的阵元为参考,信号采用正弦,考虑有加性白噪声的情况N = 16; fc = 62.5; fs = 1000; T = 0.4; %阵元数目、信号频率、采样频率和信号 %持续时间 %% 第1题 (a )for theta = 0:10:100; %入射信号角度t_delta = abs(cos(theta/180*pi))/(2*fc); %相邻阵元的时延 t_noise = 0:1/fs:T+(N-1)*t_delta; %整个信号+噪声采样时间 X = zeros(N+1,length(t_noise)); for n = 1:Nnn = (N+1)*(theta>90) + (-1)^(theta>90)*n; %判断角度是否大于90 temp = floor((n-1)*t_delta*fs);if (n-1)*t_delta*fs-temp <= 10^(-12) %判断信号起点是否处于采样点 t_signal = 0:1/fs:T; %信号采样点X(nn,temp+1:temp+length(t_signal)) = sin(2*pi*fc*t_signal);02040608090100120140160180输出信号求和:d B%存储信号elset_signal = (temp+1-(n-1)*t_delta*fs)/fs:1/fs:T; %信号采样点X(nn,temp+2:temp+1+length(t_signal)) =sin(2*pi*fc*t_signal); %存储信号endnoise = 0.01*randn(size(t_noise)); %生成噪声,如果不需要,将方差设为0 X(nn,:) = X(nn,:) + noise; %存储信号+噪声X(N+1,:) = X(N+1,:) + X(nn,:); %所有阵元采样求和endX_out = X(N+1,:)/16; %采用均匀加权plot3(theta*ones(size(t_noise)),t_noise,X_out); hold on; %三维表示%输出序列endhold off; grid on;xlabel('\it \theta'); ylabel('\it t'); zlabel('输出信号幅度');%% 第1题(b)for theta = 0:180; %入射信号角度t_delta = abs(cos(theta/180*pi))/(2*fc); %相邻阵元时延t_noise = 0:1/fs:T+(N-1)*t_delta; %整个信号+噪声的采样时间X = zeros(N+1,length(t_noise));for n = 1:Nnn = (N+1)*(theta>90) + (-1)^(theta>90)*n; %判断角度是否大于90temp = floor((n-1)*t_delta*fs);if (n-1)*t_delta*fs-temp <= 10^(-12) %判断信号起点是否位于采样点t_signal = 0:1/fs:T; %信号采样点X(nn,temp+1:temp+length(t_signal)) =sin(2*pi*fc*t_signal); %存储信号elset_signal = (temp+1-(n-1)*t_delta*fs)/fs:1/fs:T; %信号采样点X(nn,temp+2:temp+1+length(t_signal)) =sin(2*pi*fc*t_signal); %存储信号endnoise = 0.01*randn(size(t_noise)); %生成噪声,如果不需要,将方差设为0 X(nn,:) = X(nn,:) + noise; %信号+噪声X(N+1,:) = X(N+1,:) + X(nn,:); %所有阵元采样求和endX_out = X(N+1,:)/16; X_sum = 0; %采用均匀加权X_dB(theta+1) = 10*log10(sum(X_out.^2)); %求分贝(没有进行归一)endfigure; plot(0:180,X_dB); grid on;xlabel('\it \theta'); ylabel('输出信号求和:dB');注:1.所给程序为有噪声的情况。
限于篇幅,画图部分程序稍有改变,但不影响最终结果。
2.程序包含第一问的三维输出序列(图一)和第二问的经过平方求和取分贝的图形(图四),在程序中有说明。
3.对于图二和图三的程序,可以很容易的根据图一的程序得出。
但由于篇幅所限,没有给出具体程序;第2题考虑一个10元标准线列阵(阵元间隔为1000Hz对应波长的一半),该阵列接收从远场入射的两个平面波连续信号,它们的入射角和频率如下表所示。
设这两个信号的信噪比均为5dB,请针对表中所示的入射角和信号频率,分别给出常规波束形成法和MUSIC方法的空间方位谱。
计算时假定观测时间为0.1秒,采样频率为8192Hz,阵元噪声为空间白噪声,且各阵元上噪声功率相等。
说明1:对于每一种入射角和信号频率情况,把两种方法给出的空间方位谱放在同一图中。
说明2:信噪比统一定义为信号功率和噪声功率之比。
频率(Hz)960 999 960 999 信号1入射角(度)85 85 90 90频率(Hz)1040 1001 1040 1001 信号2入射角(度)95 95 95 951)仿真图图五:入射角度分别为85°和95°频率分别为960Hz 和1040Hz 信号的常规波束搜索和MUSIC 算法仿真结果图六:入射角度分别为85°和95°频率分别为999Hz 和1001Hz 信号的常规波束搜索和MUSIC 算法仿真结果-10-5051015202530 θS N R 0(d B )波束搜索MUSIC2040608595120140160180θS N R 0(d B )波束搜索MUSIC图七:入射角度分别为90°和95°频率分别为960Hz 和1040Hz 信号的常规波束搜索和MUSIC 算法仿真结果图八:入射角度分别为90°和95°频率分别为999Hz 和1001Hz 信号的常规波束搜索和MUSIC 算法仿真结果结论:从上图五、图六、图七和图八可以看出:对于所给频率和入射角度的两个信号,MUSIC 算法在图五、图六和图七信号源位置准确的显示了两个204060809095120140160180-10-505101520253035 θS N R 0(d B )波束搜索MUSIC204060809095120140160180-10-505101520253035 θS N R 0(d B )波束搜索MUSIC分离的谱峰。
在图八中也出现了两个谱峰,但谱峰之间的凹陷非常小,以至于信号可能无法被分辨;常规波束搜索算法在图五和图六也出现了两个谱峰,但在图五谱峰之间的凹陷也非常小,以至于信号可能无法被分辨。
从图五、图六、图七和图八对比中我们可以得出:①在相同的信噪比情况下,对于常规波束算法,如果两个信号频率间距不变,但入射角度间距缩小,或入射角度间距不变,频率间距扩大,或入射角度间距缩小,频率间距扩大,可能导致信号从可被分辨变为无法分辨;对于MUSIC算法,如果信号入射角度间距不变,但频率间距缩小,可能导致信号从可被分辨变为无法分辨。
②在信号可被分辨的情况下,MUSIC算法表现出了比常规波束更好的性能。