阵列信号处理方面10个经典程序
- 格式:doc
- 大小:1.25 MB
- 文档页数:24
5g 相控阵信号处理流程
5G相控阵信号处理流程主要涉及以下步骤:
1. 接收信号:相控阵天线接收到来自不同方向的信号。
2. 信号分路:接收到的信号分路传输,每一路对应一个天线单元。
3. 相位调整:根据需要调整每个天线单元的相位,以形成所需的波束指向。
这可以通过改变每个天线单元通道的相位(或时延)来实现。
4. 信号合成:调整相位后的各个天线单元信号被合成,形成所需的波束。
5. 信号增强:可能需要进行信号增强处理,例如通过增加增益或使用可控衰减器,以改善信号质量。
6. 信号解调:解调处理将原始信息从调制信号中提取出来。
7. 信号处理:对解调后的信号进行进一步的处理,例如滤波、去噪、解码等。
8. 输出结果:处理后的信号被输出,可以用于后续的应用或进一步的处理。
以上是5G相控阵信号处理的基本流程,具体的实现方式可能会根据不同的系统和应用需求有所差异。
音频阵列信号处理技术的应用案例和声源定位方法音频阵列信号处理技术是一种利用多个麦克风进行信号采集和处理的技术。
通过对多个麦克风采集的音频信号进行合理的处理和分析,可以实现各种应用场景下的声源定位、环境识别、噪声抑制等功能。
本文将介绍几个音频阵列信号处理技术的典型应用案例和声源定位方法。
一、室内会议语音对话录音与识别在室内会议场景中,利用音频阵列信号处理技术可以实现对多个与会者的语音信号的准确采集和识别。
首先,需要使用多个麦克风布置成一定的阵列形式,以便于对不同方向的声源进行准确的采集。
然后,对采集到的多路麦克风信号进行阵列信号处理,通过波束形成算法对感兴趣的声源进行增强,抑制其它噪声干扰。
最后,将处理后的音频信号输入到语音识别系统进行语音识别。
通过音频阵列信号处理技术的应用,可以大大提高会议语音对话录音的质量和语音识别的准确率。
二、智能家居语音助手音频信号处理智能家居语音助手已经成为越来越多家庭的重要组成部分,而音频阵列信号处理技术可以提升智能家居语音助手的声源定位和语音交互能力。
通过在智能家居设备中部署音频阵列麦克风,并利用波束形成算法对用户发出的语音信号进行增强,可以有效降低噪声干扰,提升语音助手对用户指令的识别准确率。
此外,通过采集多个方向的声音信号,还可以实现智能语音助手的声源定位功能,使其能够定位用户的位置并将声音指向相应的方向,提供更便捷的语音交互体验。
三、远场语音识别技术的应用远场语音识别是指在远离麦克风的情况下,利用音频阵列信号处理技术实现对用户语音命令的准确识别。
音频阵列麦克风可以采集到用户远离麦克风的语音信号,并利用波束形成等技术对远声源进行增强,抑制其他噪声干扰。
此外,还可以使用混音技术将远场语音信号与近场语音信号相结合,提高识别准确率。
远场语音识别技术的广泛应用包括智能音箱、车载语音控制系统等。
四、音频会议噪声抑制技术音频会议中,各个与会者通常分处不同位置,由于远距离传输和环境噪声等因素的影响,会导致音频信号质量下降。
阵列信号处理原理、方法与新
阵列信号处理是一种利用多个传感器(如麦克风、天线等)获取信号,通过信号处理
算法将其合成为一个复合信号,并在此基础上分离、定位、去除、增强等操作的新型信号
处理技术。
在目前的通信、雷达、声学、医学等领域都有广泛应用。
阵列信号处理的基本原理是通过获取多个传感器采样的信号,根据它们的相对位置和
接收到信号的时间差异,构建一个信号阵列,然后通过信号合成的方法将这些信号合成为
一个复合信号。
根据复合信号的特征,进行后续的信号处理。
阵列信号处理的主要方法包括波束形成、空间滤波、方向估计等。
波束形成的主要目
的是聚焦探测器的接收能力,使其在目标方向上获得更高的灵敏度。
空间滤波的主要目的
是通过利用阵列传感器之间的相对位置和互相之间的传感器响应差异,对信号进行滤波,
达到抑制噪声、增强信号等效果。
方向估计则是通过对信号在阵列中传播的速度和波束方
向的监测,对信号的方向进行估计。
阵列信号处理技术的应用十分广泛,其中最为常见的应用领域是通信、雷达和声学等。
在通信中,利用阵列信号处理技术进行信号增强和去除干扰,并根据信号的传播速度和方
向进行信号定位和跟踪。
在雷达中,利用阵列信号处理技术对雷达信号进行波束形成和目
标方向估计,提高雷达的探测效率和目标定位精度。
在声学中,利用阵列信号处理技术进
行声波信号的定位、分离和降噪等操作,提高语音识别和音频娱乐的质量。
总之,阵列信号处理技术是一种高效、可靠的信号处理方法,可以广泛应用于各个领域,有着十分重要的实际应用价值。
多通道信号处理中的阵列信号处理技术在现代通信领域中,多通道信号处理已成为一项重要的技术,能够在众多应用中实现高效的信号提取和处理。
而其中,阵列信号处理技术则是多通道信号处理中的关键技术之一。
本文将以阵列信号处理技术为主题,探讨其在多通道信号处理中的应用和重要性。
一、阵列信号处理技术的基本概念阵列信号处理技术是指利用多个接收通道对信号进行采集和处理的一种信号处理方法。
这些接收通道可以部署在不同的位置上,通过对各通道接收到的信号进行分析和处理,可以获得目标信号的方向、距离和频率等信息。
阵列信号处理技术在无线通信、雷达、声纳等领域中都有着广泛的应用。
二、阵列信号处理技术的原理在阵列信号处理中,通过合理地设计和部署接收通道,并利用差分和合成等技术,可以实现对信号的增强和抑制。
其基本原理可以概括为以下几个方面:1. 时差测量:通过计算不同通道接收到信号的时间差,可以确定信号的到达方向。
这种方法被广泛应用于声纳和雷达领域,用于目标定位和跟踪。
2. 相关性分析:通过对不同通道接收到的信号进行相关性分析,可以提取出目标信号并抑制噪声。
这种方法在无线通信和雷达等领域中被广泛应用,可以提高信号的质量和可靠性。
3. 波束形成:通过对接收到的信号进行加权合成,可以实现对信号的增强和抑制。
这种方法在天线和无线通信系统中被广泛应用,可以提高通信质量和距离。
三、阵列信号处理技术在多通道信号处理中的应用阵列信号处理技术在多通道信号处理中有着重要的应用。
以下列举了几个常见的应用场景:1. 无线通信系统:在无线通信系统中,利用阵列技术可以实现多天线发射和接收。
通过对接收到的信号进行处理,可以提高无线信号的覆盖范围和传输速率。
2. 声纳系统:在声纳系统中,通过部署多个接收通道,可以实现对海洋中的声波信号进行定位和跟踪。
阵列信号处理技术可以提高声纳系统的性能和探测范围。
3. 雷达系统:在雷达系统中,利用阵列技术可以实现对目标信号的定位和跟踪。
阵列接收信号处理流程一、信号接收阵列接收信号处理的第一步是信号接收。
在阵列中,有多个接收器同时接收信号。
这些接收器可以是天线、传感器或其他接收设备。
每个接收器都可以独立地接收到信号,并将信号传输到后续的信号处理单元。
二、信号预处理接收到的信号可能会受到噪声、干扰或其他不完美因素的影响,因此需要进行信号预处理。
信号预处理的目的是提高信号的质量和准确性。
常见的信号预处理方法包括滤波、增益控制、噪声消除和时序校正等。
滤波是信号预处理的一种常用方法。
通过滤波可以去除信号中的噪声和干扰,提高信号的清晰度和可辨识度。
常见的滤波方法有低通滤波、高通滤波和带通滤波等。
增益控制是调整信号强度的方法。
通过增益控制可以使信号的强度达到最佳状态,避免信号过强或过弱的问题。
噪声消除是去除信号中噪声成分的方法。
噪声是信号中的不完美因素,可能会干扰信号的质量和准确性。
通过噪声消除可以提高信号的清晰度和准确性。
时序校正是调整信号的时序关系的方法。
在多个接收器同时接收信号时,由于信号传输路径的不同,信号到达各个接收器的时间可能存在微小的差异。
通过时序校正可以使信号的时序关系达到一致,提高信号的同步性和准确性。
三、信号合并经过信号预处理后,接收到的信号可以进行合并。
信号合并是将多个接收器接收到的信号进行综合和整合的过程。
通过信号合并可以提高信号的强度和准确性,增加信号的可靠性和鲁棒性。
常见的信号合并方法有加权平均法、最大比例合并法和最大比例合并法等。
加权平均法是将每个接收器接收到的信号按照一定的权重进行加权平均,得到综合的信号。
最大比例合并法是选择接收到信号强度最大的接收器的信号作为综合的信号。
最大比例合并法是根据接收到信号的强度比例进行综合,提高信号的强度和准确性。
四、信号解调和解码信号合并后,接下来需要进行信号的解调和解码。
信号解调是将调制信号转化为原始信号的过程。
常见的调制方式有频率调制、相位调制和振幅调制等。
通过信号解调可以恢复出原始信号的特征和信息。
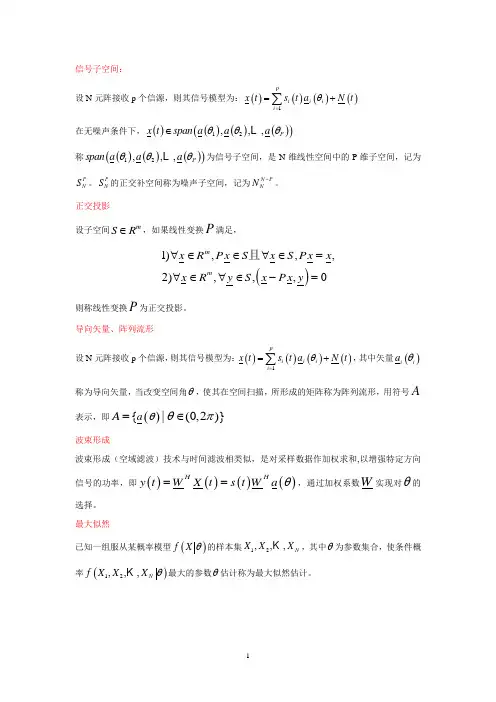
信号子空间:设N 元阵接收p 个信源,则其信号模型为:()()()()1piiii x t s t a N t θ==+∑在无噪声条件下,()()()()()12,,,P x t span a a a θθθ∈称()()()()12,,,P span a a a θθθ 为信号子空间,是N 维线性空间中的P 维子空间,记为P NS 。
PN S 的正交补空间称为噪声子空间,记为N P N N -。
正交投影设子空间m S R ∈,如果线性变换P 满足,()1),,,2),,,0m mx R Px S x S Px x x R y S x Px y ∀∈∈∀∈=∀∈∀∈-=且则称线性变换P 为正交投影。
导向矢量、阵列流形设N 元阵接收p 个信源,则其信号模型为:()()()()1piiii x t s t a N t θ==+∑,其中矢量()i ia θ称为导向矢量,当改变空间角θ,使其在空间扫描,所形成的矩阵称为阵列流形,用符号A 表示,即(){|(0,2)}a A θθπ=∈波束形成波束形成(空域滤波)技术与时间滤波相类似,是对采样数据作加权求和,以增强特定方向信号的功率,即()()()()HHy t W X t s t W a θ==,通过加权系数W实现对θ的选择。
最大似然已知一组服从某概率模型()f X θ的样本集12,,,N X X X ,其中θ为参数集合,使条件概率()12,,,N f X X X θ 最大的参数θ估计称为最大似然估计。
不同几何形态的阵列的阵列流形矢量计算问题假设有P 个信源,N 元阵列,则先建立阵列的几何模型求第i 个信源的导向矢量()i i a θ 选择阵元中的一个作为第一阵元,其导向矢量()1[1]i a θ=然后根据阵列的几何模型求得其他各阵元与第一阵元之间的波程差n ∆,则确定其导向矢量()2jn i a eπλθ∆=最后形成N 元阵的阵列流形矢量()11221N j j N Pe A e πλπλθ-∆∆⨯⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦ 例如各向同性的NxM 元矩形阵,阵元间隔为半个波长,当信源与阵列共面时:首先建立阵列几何模型:对于第m 行、第n 列的阵元,其与第1行、第1列阵元之间的波程差为(1)sin()(1)cos()mn i i n d m d θθ∆=---故:()1122(sin()cos())22((1)sin()(1)cos())11N j j d j j d N M NM P NM Pe e A e e ππθθλλππθθλλθ-∆-∆---⨯⨯⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦而当信源与阵列不共面时: 首先将信源投影到阵列平面然后建立阵列模型对于第m 行、第n 列的阵元,其与第1行、第1列阵元之间的波程差为[(1)sin()(1)cos()]sin()mn i i i n d m d θθϕ∆=-+-故:()1122(sin()cos())cos()22((1)sin()(1)cos())cos()11N j j d j j d N M NM P NM Pe e A e e ππθθϕλλππθθϕλλθ-∆-∆---⨯⨯⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦线性约束最小方差准则(LCMV )的自适应波束形成算法: 对于信号模型:()()()0X t s t a J N θ=++, 波束形成输出:()()()()0()H H H yt W X t s t W a W J N θ==++LCMV 准则实际上是使()0HW a θ为一个固定值的条件下,求取使得()HWJ N +方差最小的W 作为最有权值,即:()0min .H X WHW R Ws t W a Fθ⎧⎪⎨⎪=⎩,其中F 为常数利用拉格朗日乘子法可解得:()10X opt W R a μθ-=当取1F =时,则()()11H X a R a μθθ-=,μ的取值不影响SNR 和方向图。
阵列信号处理是信号处理的一个年青的分支,属于现代信号处理的重要研究内容之一,其应用范围很广,可用于雷达、声呐、通信、地震勘察、射电天文和医用成像等众多领域。
阵列信号处理是将一组传感器在空间的不同位置按一定规则布置形成的传感器阵列(尽管采用的传感器的类型可以不同,如天线、水听器、听地器、超声探头、X射线检测器,但是传感器的功能是相同的,它是连接信号处理器和感兴趣的空间纽带),用传感器阵列发射能量和(或)接收空间信号,获得信号源的观测数据并加以处理。
阵列信号处理的目的是从这些观测数据中提取信号的有用特征,获取信号源的属性等信息。
目前,阵列信号处理在雷达及移动通信等领域有着广泛而重要的应用。
在相控阵雷达体制中,自适应波束形成技术在抑制杂波干扰方面起着关键的作用。
在移动通信中,基于阵列信号处理的波达方向估计技术,使移动通信进入一个崭新的阶段。
本论文首先介绍阵列信号处理的基础知识。
在此基础上,着重讨论阵列波束形成技术,非理想线性阵列的雷达信号波达方向和多普勒频率估计,均匀圆形阵列的信号波达方向估计和复杂信号的波达方向及参数估计等四方面内容。
这些内容都是阵列信号处理领域的研究热点。
它们无论对阵列信号处理的理论发展还是实际应用,都有重要的意义。
目前,人们普遍关注在阵列响应矢量未知情况下,自适应波束形成问题,即盲自适应波束形成技术。
本文第一方面介绍了最基本的阵列波束形成方法,即最小均方误差波束形成器,线性约束最小方差波束形成器和基于特征空间的波束形成器(ESB)。
在此基础上,提出一个基于特征空间的盲自适应波束形成算法。
此算法首先根据高分辨波达方向估计方法,估计信号源的波达方向,然后以此方向形成约束导向矢量,进而计算出ESB波束形成算法的最优权矢量,最后,对期望目标形成笔状波束。
此算法能够有效地抑制信号的对消现象,并且能够应用于在波束中有多个期望信号的场合。
当阵列存在各种误差时,一般高分辨波达方向估计方法(如MUSIC)的估计性能严重下降。
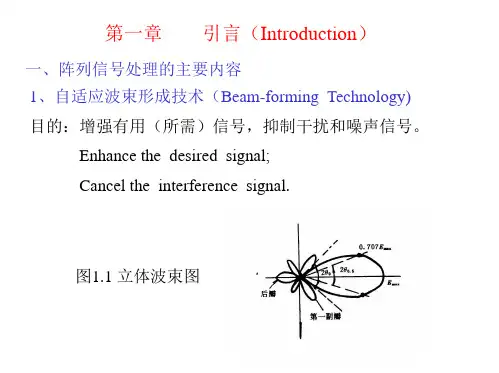
阵列信号处理中的DOA(窄带)空域滤波波束形成:主要研究信号发射/接收过程中的信号增强。
空间谱估计空域参数估计:从而对目标进行定位/给空域滤波提供空域参数。
测向波达方向估计(DOA)空间谱:输出功率P关于波达角θ的函数,P(θ).延迟——相加法/经典波束形成器注,延迟相加法和CBF法本质相同,仅仅是CBF法的最优权向量是归一化了的。
1、传统法常规波束形成CBF/Bartlett波束形成器常规波束形成(CBF:Conventional Beam Former)Capon最小方差法/Capon 波束形成器/MVDR波束形成器最小方差无畸变响应(MVDR:minimum variance distortionless response)Root-MUSIC算法多重信号分类法解相干的MUSIC算法(MUSIC)基于波束空间的MUSIC算法2、[object Object]TAM旋转不变子空间法 LS-ESPRIT (ESPRIT)TLS-ESPRIT确定性最大似然法(DML:deterministic ML)3、最大似然法随机性最大似然法(SML:stochastic ML)4、综合法:特性恢复与子空间法相结合的综合法,首先利用特征恢复方案区分多个信号,估计空间特征,进而采用子空间法确定波达方向最大似然估计法是最优的方法,即便是在信噪比很低的环境下仍然具有良好的性能,但是通常计算量很大。
同子空间方法不同的是,最大似然法在原信号为相关信号的情况下也能保持良好的性能。
阵列流形矩阵(导向矢量矩阵)只要确定了阵列各阵元之间的延迟τ,就可以很容易地得出一个特定阵列天线的阵列流形矩阵A。
传统的波达方向估计方法是基于波束形成和零波导引概念的,并没有利用接收信号向量的模型(或信号和噪声的统计特性)。
知道阵列流形 A 以后,可以对阵列进行电子导引,利用电子导引可以把波束调整到任意方向上,从而寻找输出功率的峰值。
①常规波束形成(CBF)法CBF法,也称延迟—相加法/经典波束形成器法/傅里叶法/Bartlett波束形成法,是最简单的DOA 估计方法之一。
使用Matlab进行阵列信号处理的技巧与方法引言:阵列信号处理是一种用于提取和增强阵列传感器接收到的信号的技术。
在现代通信、雷达、声音处理等领域中得到广泛应用。
Matlab作为一款功能强大的数学软件,提供了丰富的工具和函数,可用于实现阵列信号处理算法。
本文将介绍一些使用Matlab进行阵列信号处理的关键技巧和方法。
一、信号预处理在进行阵列信号处理之前,通常需要对接收到的信号进行预处理。
预处理的目的是降低噪声、增强信号和提取有用的信息。
Matlab提供了多种预处理函数和工具,如滤波、降噪和频谱分析等。
以下是一些常用的信号预处理方法:1.1 信号滤波滤波技术用于去除信号中的噪声和不需要的频率成分。
Matlab提供了丰富的滤波函数,如低通滤波、高通滤波和带通滤波等。
可以根据需求选择适当的滤波器,并使用滤波函数对信号进行滤波。
滤波后的信号可以更好地用于后续的信号处理。
1.2 降噪降噪是指去除信号中的噪声成分,使得信号更加清晰和有效。
Matlab提供了多种降噪方法,如小波降噪、信号平滑和中值滤波等。
可以根据噪声的特点选择适当的降噪方法,并使用相关函数实现降噪操作。
1.3 频谱分析频谱分析用于分析信号的频率成分和谱特性。
Matlab提供了多种频谱分析工具,如FFT、STFT和功率谱密度估计等。
可以使用这些工具对信号的频率特性进行分析,并可进一步提取感兴趣的频率成分。
二、阵列信号分离与波束形成阵列信号分离与波束形成是阵列信号处理的关键步骤。
在多传感器阵列中,通过对接收到的信号进行分析和处理,可以实现对不同源信号的分离和定位。
2.1 空间滤波空间滤波是阵列信号处理中的一种常用技术。
通过利用阵列传感器之间的空间差异,对接收到的信号进行滤波和分离。
Matlab提供了多种空间滤波函数和工具,如波束形成、最小方差无失真响应(MVDR)等。
可以根据阵列的布局和信号源的分布,选择适当的空间滤波方法,并使用相关函数实现。
2.2 目标定位目标定位是指在接收到的信号中确定源信号的方向和位置。
阵列信号处理基础教程阵列信号处理是一项重要的数字信号处理技术,用于从多个传感器接收到的信号中提取有用的信息。
阵列信号处理可以用于各种应用,例如无线通信、声学信号处理和雷达系统等。
本文将介绍阵列信号处理的基本概念、技术和应用。
阵列信号处理的主要目标是通过对多个传感器接收到的信号进行处理,从中提取有用的信息。
其中一个常见的任务是估计信号的到达方向。
通过测量信号在不同传感器间的相位差,可以估计信号的波前到达角度。
这种估计可以用于声源定位、雷达目标跟踪等应用中。
在阵列信号处理中,有几种常用的方法用于估计信号的到达方向。
其中一种方法是波束形成技术。
波束形成是一种利用传感器阵列的相干性增强信号的方法,从而提高信号的功率和信噪比。
波束形成通过对传感器接收到的信号进行加权和相干处理,使得来自特定方向的信号在输出中得到增强,而来自其他方向的信号被压制。
另一种常用的方法是空间谱估计技术。
空间谱估计是一种通过对传感器接收到的信号进行功率谱估计从而估计信号的到达方向的方法。
空间谱估计技术包括传统方法如基于协方差矩阵或自相关矩阵的方法,以及现代方法如基于模型的方法或压缩感知方法。
除了信号波前到达角度的估计,阵列信号处理还可以用于其他任务,例如信号分离、自适应滤波和声源增强等。
在信号分离中,阵列信号处理可以通过对传感器接收到的混合信号进行处理,将其分解为原始信号的组合。
自适应滤波是一种利用传感器阵列的几何结构和信号统计性质设计滤波器的方法。
声源增强是一种通过改善信号的信噪比来提高信号质量的方法,从而增强人们对声音的感知。
阵列信号处理在无线通信、声学信号处理和雷达系统等领域都有广泛的应用。
在无线通信中,阵列信号处理可以用于无线通信信道的估计和均衡,以提高通信性能。
在声学信号处理中,阵列信号处理可以用于语音信号的增强和麦克风阵列的防噪声设计。
在雷达系统中,阵列信号处理可以用于目标检测、目标跟踪和成像等任务。
综上所述,阵列信号处理是一项重要的数字信号处理技术,用于从多个传感器接收到的信号中提取有用的信息。
1.均匀线阵方向图%8阵元均匀线阵方向图,来波方向为0度clc;clear all;close all;imag=sqrt(-1);element_num=8;%阵元数为8d_lamda=1/2;%阵元间距d与波长lamda的关系theta=linspace(-pi/2,pi/2,200);theta0=0;%来波方向w=exp(imag*2*pi*d_lamda*sin(theta0)*[0:element_num-1]');for j=1:length(theta)a=exp(imag*2*pi*d_lamda*sin(theta(j))*[0:element_num-1]');p(j)=w'*a;endfigure;plot(theta,abs(p)),grid onxlabel('theta/radian')ylabel('amplitude')title('8阵元均匀线阵方向图')当来波方向为45度时,仿真图如下:8阵元均匀线阵方向图如下,来波方向为0度,20log(dB)随着阵元数的增加,波束宽度变窄,分辨力提高:仿真图如下:2.波束宽度与波达方向及阵元数的关系clcclear allclose allima=sqrt(-1);element_num1=16; %阵元数element_num2=128;element_num3=1024;lamda=0.03; %波长为0.03米d=1/2*lamda; %阵元间距与波长的关系theta=0:0.5:90;for j=1:length(theta);fai(j)=theta(j)*pi/180-asin(sin(theta(j)*pi/180)-lamda/(element_num1*d));psi(j)=theta(j)*pi/180-asin(sin(theta(j)*pi/180)-lamda/(element_num2*d));beta(j)=theta(j)*pi/180-asin(sin(theta(j)*pi/180)-lamda/(element_num3*d)); endfigure;plot(theta,fai,'r',theta,psi,'b',theta,beta,'g'),grid onxlabel('theta');ylabel('Width in radians')title('波束宽度与波达方向及阵元数的关系')仿真图如下:3. 当阵元间距时,会出现栅瓣,导致空间模糊。
仿真图如下:/2d λ>4.类似于时域滤波,天线方向图是最优权的傅立叶变换仿真程序和仿真图如下:clcclear allclose allima=sqrt(-1);element_num=32; %阵元数source_num=1; %信源数d_lamda=1/2; %阵元间距与波长的关系theta=linspace(-pi/2,pi/2,200);theta0=0; %来波方向w=exp(ima*2*pi*d_lamda*sin(theta0)*[0:element_num-1]');for j=1:length(theta);a=exp(ima*2*pi*d_lamda*sin(theta(j))*[0:element_num-1]');p(j)=w'*a;endfigure;subplot(1,2,1)plot(theta,abs(p)),grid onxlabel('theta/radian')ylabel('amplitude')title('按定义的方向图')pfft=fftshift(fft(w,128));subplot(1,2,2)plot(linspace(-pi/2,pi/2,128),abs(pfft)),grid onxlabel('theta/radian')ylabel('FFT_amplitude')title('最优权的傅里叶变换')5.%最大信噪比准则方向图和功率谱clc;clear all;close all;ima=sqrt(-1);element_num=8; %阵元数为8d_lamda=1/2; %间距为半波长theta=-90:0.5:90; %范围theta0=0; %来波方向theta1=20; %干扰方向L=512; %采样单元数for i=1:Lamp0=10*randn(1);amp1=200*randn(1);ampn=1;s(:,i)=amp0*exp(ima*2*pi*1/2*sin(theta0*pi/180)*[0:element_num-1]');j(:,i)=amp1*exp(ima*2*pi*1/2*sin(theta1*pi/180)*[0:element_num-1]');n(:,i)=ampn*(randn(element_num,1)+ima*randn(element_num,1));endRs=1/L*s*s'; %信号自相关矩阵Rnj=1/L*(j*j'+n*n'); %干扰+噪声的自相关矩阵[V,D]=eig(Rs,Rnj); %(Rs,Rnj)的广义特征值和特征向量[D,I]=sort(diag(D)); %排序Wopt=V(:,I(8)); %最优权矢量for j=1:length(theta)a=exp(ima*2*pi*d_lamda*sin(theta(j)*pi/180)*[0:element_num-1]');f(j)=Wopt'*a;p(j)=a'*Rs*a+a'*Rnj*a;endF=20*log10(abs(f)/max(max(abs(f))));P=20*log10(abs(p)/max(max(abs(p))));subplot(121)plot(theta,F);grid on;hold onplot(theta0,-50:0,'.');plot(theta1,-50:0,'.')xlabel('theta/0');ylabel('F in dB');title('max-SNR 方向图');axis([-90 90 -50 0]);hold onsubplot(122)plot(theta,P,'r');grid onxlabel('theta/0');ylabel('功率in dB');title('max-SNR功率谱')仿真图如下:6.%ASC旁瓣相消----MSE准则clc;close all;clear allima=sqrt(-1);M=32; %辅助天线的数目d_lamda=.5;theta0=-30; %来波方向theta1=60; %干扰方向L=512; %采样单元数s=zeros(1,512); %预划分一个区域for ii=1:L;amp0=1*randn(1); %信号的幅度随机产生,保证信号之间是不相关的amp1=200*randn(1);ampn=1;jam(:,ii)=amp1*exp(ima*2*pi*0.5*sin(theta1*pi/180)*[0:M-1]')+ampn*(randn(M,1) +ima*randn(M,1)); %干扰+噪声s(ii)=amp0*exp(ima*2*pi*0.5*sin(theta0*pi/180))+amp1*exp(ima*2*pi*0.5*sin(thet a1*pi/180))+ampn*(randn(1,1)+ima*randn(1,1));%接收信号(信号+干扰+噪声)s0(ii)=amp0*exp(ima*2*pi*0.5*sin(theta0*pi/180));endRx=1/L*jam*jam'; %噪声自相关矩阵,相当于X(t)r_xd=1/L*jam*s';Wopt=pinv(Rx)*r_xd;delta=s0-(s-Wopt'*jam);delta1=abs(mean(delta.^2)-(mean(delta)).^2) %方差theta=linspace(-pi/2,pi/2,200);for jj=1:length(theta)a=exp(ima*2*pi*.5*sin(theta(jj))*[0:M-1]');f(jj)=Wopt'*a;endF=20*log10(abs(f)/(max(max(abs(f)))));figure(1)plot(theta*180/pi,F),grid on,hold onplot(theta0,-50:0,'.')plot(theta1,-50:0,'.')xlabel('theta/o');ylabel('F/dB');title('MSE准则下的方向图')axis([-90 90 -50 0]);%可为x轴和y轴设置一个极限范围仿真图如下:7. %线性约束最小方差(LCMV)准则clc;clear all ;close all;ima=sqrt(-1);element_num=8; %阵元数d_lamda=1/2; %阵元间距与波长的关系theta=-90:0.5:90-0.3; %搜索范围theta0=0; %三个信号源的来波方向theta1=30;theta2=60;L=512; %采样单元数for i=1:L;amp0=10*randn(1);amp1=100*randn(1);amp2=10*randn(1);ampn=10;x(:,i)=amp0*exp(ima*2*pi*1/2*sin(theta0*pi/180)*[0:element_num-1]')+...amp1*exp(ima*2*pi*1/2*sin(theta1*pi/180)*[0:element_num-1]')+...amp2*exp(ima*2*pi*1/2*sin(theta2*pi/180)*[0:element_num-1]')+...ampn*(randn(element_num,1)+ima*randn(element_num,1));endRx=1/L*x* x';steer1=exp(ima*2*pi*1/2*sin(theta0*pi/180)*[0:element_num-1]')steer2=exp(ima*2*pi*1/2*sin(theta1*pi/180)*[0:element_num-1]')steer3=exp(ima*2*pi*1/2*sin(theta2*pi/180)*[0:element_num-1]')C=[steer1 steer2 steer3];F=[1 0 1]'; %把三个方向都作为来波方向w=inv(Rx)*C*(inv(C'*inv(Rx)*C))*F;for j=1:length(theta);a=exp(ima*2*pi*d_lamda*sin(theta(j)*pi/180)*[0:element_num-1]');f(j)=w'*a;p(j)=1/(a'*inv(Rx)*a);endf=10*log10(abs(f)/(max(max(abs(f)))));figure(1)subplot(121)plot(theta,f),grid on,hold onplot(theta0,-20:0,'.')plot(theta1,-20:0,'.')plot(theta2,-20:0,'.')xlabel('theta/o');ylabel('F/dB');title('Capon beamforming方向图')axis([-90 90 -20 0]);%可为x轴和y轴设置一个极限范围P=10*log10(abs(p)/(max(max(abs(p)))));subplot(122)plot(theta,P),grid on,hold onplot(theta0,-20:0,'.')plot(theta1,-20:0,'.')plot(theta2,-20:0,'.')xlabel('theta/o');ylabel('功率/dB');title('Capon beamforming功率谱')仿真图如下:8. %Capon beamformingClc;clear all ;close all;ima=sqrt(-1);element_num=8; %阵元数d_lamda=1/2; %阵元间距与波长的关系theta=-90:0.5:90; %范围theta0=0; %来波方向theta1=20; %干扰方向theta2=60; %干扰方向L=1000; %采样单元数for i=1:L;amp0=10*randn(1);%信号的幅度随机产生,保证信号之间是不相关的amp1=200*randn(1);amp2=200*randn(1);ampn=3;x(:,i)=amp0*exp(ima*2*pi*1/2*sin(theta0*pi/180)*[0:element_num-1]')+...amp1*exp(ima*2*pi*1/2*sin(theta1*pi/180)*[0:element_num-1]')+...amp2*exp(ima*2*pi*1/2*sin(theta2*pi/180)*[0:element_num-1]')+...ampn*(randn(element_num,1)+ima*randn(element_num,1));endRx=1/L*x* x';R=inv(Rx);steer=exp(ima*2*pi*1/2*sin(theta0*pi/180)*[0:element_num-1]');w=R*steer/(steer'*R*steer);%Capon最优权矢量for j=1:length(theta);a=exp(ima*2*pi*d_lamda*sin(theta(j)*pi/180)*[0:element_num-1]');f(j)=w'*a;p(j)=1/(a'*R*a);endF=20*log10(abs(f)/(max(max(abs(f)))));P=20*log10(abs(p)/(max(max(abs(p)))));%此处是功率的对数形式Figure;subplot(121)plot(theta,F),grid on,hold onplot(theta0,-50:0,'.')plot(theta1,-50:0,'.')plot(theta2,-50:0,'.')xlabel('theta/o');ylabel('F/dB');title('Capon beamforming方向图')axis([-90 90 -50 0]);subplot(122)plot(theta,P),grid onxlabel('theta/o');ylabel('功率/dB');title('Capon beamforming功率谱')仿真图如下:9.%不同方法估计协方差矩阵的Capon波束形成clc;clear all;close all;ima=sqrt(-1);element_num=8; %阵元数为8d_lamda=1/2; %间距为半波长theta=-90:0.5:90; %范围theta0=0; %来波方向theta1=50; %干扰方向L=512;%采样单元数for i=1:Lamp0=10*randn(1);amp1=50*randn(1);ampn=0.5;s(:,i)=amp0*exp(ima*2*pi*1/2*sin(theta0*pi/180)*[0:element_num-1]');j(:,i)=amp1*exp(ima*2*pi*1/2*sin(theta1*pi/180)*[0:element_num-1]');n(:,i)=ampn*exp(ima*2*pi*randn(1)*[0:element_num-1]');endRx=1/L*(s+j+n)*(s+j+n)';%接收信号自相关矩阵Rnj=1/L*(j+n)*(j+n)';%干拢+噪声的自相关矩阵e=exp(ima*2*pi*d_lamda*sin(theta0*pi/180)*[0:element_num-1]');%来波方向信号Wopt_Rx=inv(Rx)*e/(e'*inv(Rx)*e);%采用接收信号的权矢量Wopt_Rnj=inv(Rnj)*e/(e'*inv(Rnj)*e);%采用干拢+噪声信号的权矢量for j=1:length(theta)a=exp(ima*2*pi*d_lamda*sin(theta(j)*pi/180)*[0:element_num-1]');f1(j)=Wopt_Rx'*a;f2(j)=Wopt_Rnj'*a;endF1=20*log10(abs(f1)/max(max(abs(f1))));F2=20*log10(abs(f2)/max(max(abs(f2))));figure;plot(theta,F1,theta,F2,'r'),grid on;hold onplot(theta0,-50:0,'.');plot(theta1,-50:0,'.')xlabel('theta/0');ylabel('F(1,2)/dB');title('不同方法估计协方差矩阵的Capon波束形成');axis([-90 90 -50 0]);仿真图如下:10.%多点约束的Capon波束形成和方向图clc;clear all ;close all;ima=sqrt(-1);element_num=8; %阵元数d_lamda=1/2; %阵元间距与波长的关系theta=-90:0.3:90; %搜索范围theta0=0; %来波方向theta1=20; %干扰方向theta2=50; %干扰方向L=512; %采样单元数Rx=zeros(element_num,element_num);%产生协方差矩阵for i=1:L;amp0=10*randn(1);amp1=10*randn(1);amp2=50*randn(1);namp=0.5*randn(1);%噪声的幅度随机产生,保证噪声与信号之间是不相关的J(:,i)=amp1*exp(ima*2*pi*1/2*sin(theta1*pi/180)*[0:element_num-1]')+...amp2*exp(ima*2*pi*1/2*sin(theta2*pi/180)*[0:element_num-1]')+...namp*exp(ima*2*pi*randn(1)*[0:element_num-1]');x(:,i)=amp0*exp(ima*2*pi*1/2*sin(theta0*pi/180)*[0:element_num-1]')+...J(:,i);%表示接收信号endRx=Rx+1/L*x*x';R=inv(Rx);w=amp0*exp(ima*2*pi*1/2*sin(theta0*pi/180)*[0:element_num-1]')+...amp2*exp(ima*2*pi*1/2*sin(theta2*pi/180)*[0:element_num-1]')+...amp1*exp(ima*2*pi*1/2*sin(theta1*pi/180)*[0:element_num-1]');for j=1:length(theta);a=exp(ima*2*pi*d_lamda*sin(theta(j)*pi/180)*[0:element_num-1]');f(j)=w'*a;p(j)=1/(a'*R*a);endF=10*log10(abs(f)/max(max(f)));%取对数的方向图P=10*log10(abs(p)/max(max(p)));%取对数的功率谱估计figure;subplot(121)plot(theta,F),grid on,hold onplot(theta0,-50:0,'.');plot(theta1,-50:0,'.');plot(theta2,-50:0,'.'); xlabel('theta/o');ylabel('F/dB');title('capon beamforming方向图')subplot(122)plot(theta,P),grid on,hold onplot(theta0,-50:0,'.');plot(theta1,-50:0,'.');plot(theta2,-50:0,'.'); xlabel('theta/o');ylabel('P/dB');title('capon beamforming功率谱')仿真图如下:大作业%自适应波束形成方向图clc;clear all;close all;ima=sqrt(-1);element_num=8; %阵元数c=3e8;f=500e6;lamda=c/f;d=1/2*lamda; %阵元间距与波长的关系theta=-90:0.5:90; %范围theta0=0; %来波方向theta1=45; %干扰方向theta2=60; %干扰方向L=512; %采样单元数for i=1:L;amp0=10*randn(1);%信号的幅度随机产生,保证信号之间是不相关的amp1=100*randn(1);amp2=100*randn(1);ampn=10;x(:,i)=amp0*exp(ima*2*pi*1/2*sin(theta0*pi/180)*[0:element_num-1]')+...amp1*exp(ima*2*pi*1/2*sin(theta1*pi/180)*[0:element_num-1]')+...amp2*exp(ima*2*pi*1/2*sin(theta2*pi/180)*[0:element_num-1]')+...ampn*(randn(element_num,1)+ima*randn(element_num,1));%产生阵列信号endRx=1/L*x* x';steer1=exp(ima*2*pi*1/2*sin(theta0*pi/180)*[0:element_num-1]')steer2=exp(ima*2*pi*1/2*sin(theta1*pi/180)*[0:element_num-1]')steer3=exp(ima*2*pi*1/2*sin(theta2*pi/180)*[0:element_num-1]')C=[steer1 steer2 steer3];F=[1 0 0]';%把0度方向作为来波方向w=inv(Rx)*C*(inv(C'*inv(Rx)*C))*F;for j=1:length(theta);a=exp(ima*2*pi*1/2*sin(theta(j)*pi/180)*[0:element_num-1]');f(j)=w'*a;p(j)=1/(a'*inv(Rx)*a);endF=20*log10(abs(f)/(max(max(abs(f)))));P=20*log10(abs(p)/(max(max(abs(p)))));%此处是功率的对数形式figuresubplot(121)plot(theta,P),grid on,hold onxlabel('theta/o');ylabel('F/dB');title('阵列信号方向图')axis([-90 90 -50 0]);subplot(122)plot(theta,F),grid on,hold on;plot(theta0,-50:0,'.')plot(theta1,-50:0,'.')plot(theta2,-50:0,'.')xlabel('theta/o');ylabel('功率/dB');axis([-90 90 -50 0]);title('自适应波束形成方向图')仿真图如下:当采样数L=2048时仿真图如下:当采样数L=2048时仿真图如下:当L=512,幅度为amp0=10*randn(1);amp1=200*randn(1);amp2=200*randn(1);ampn=10;时仿真图如下:。