k c 其中: , ζ= , ωd = ω0 1−ζ 2 其中: ω0 = m 2ω0m
ω λ = , B= ω0
p0
2 2
(1−λ ) + (2ζλ)
k
2
2ζλ , φ = tg 1− λ2
−1
3 . 3 力激励、位移激励和加速度激励 力激励、
力激励 位移激励 加速度激励
1.力激励:(同前分析) 力激励:(同前分析) :(同前分析
3.1简谐振动下的强迫振动
此时品质因素: 此时品质因素:Q =
ω 1 = 0 2ζ ∆ω
机械阻抗:简谐振动时复数形式的输入与输出之比(位移,速度,加速度) { 机械阻抗:简谐振动时复数形式的输入与输出之比(位移,速度,加速度) 机械导钠:机械阻抗的复数。 机械导钠:机械阻抗的复数。 位移导钠和位移阻抗又称为动柔度和动刚度。 位移导钠和位移阻抗又称为动柔度和动刚度。 复频响应函数(频率响应函数) 复频响应函数(频率响应函数)
第三章 单自由系统的强迫振动
3.1 3.2 3.3 3.4 3.5 3.6 简谐振动下的强迫振动(稳定阶段 简谐振动下的强迫振动 稳定阶段) 稳定阶段 强迫振动的过渡过程 力激励,位移激励和加速度激励 力激励 位移激励和加速度激励 振动的隔离 周期激励的响应 任意激励的响应
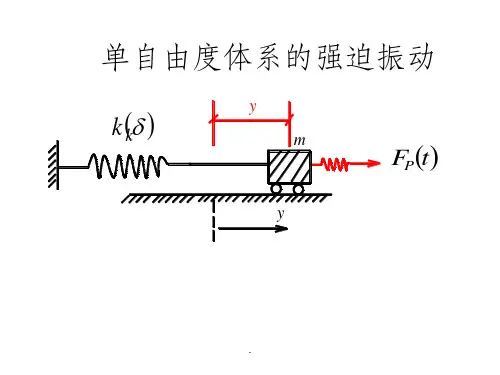
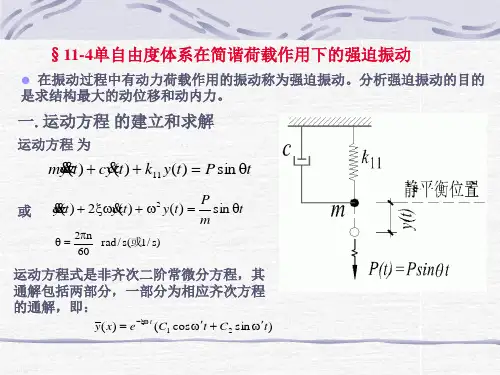
3.1简谐振动下的强迫振动
mɺɺ+ cx + kx = p sin ωt x ɺ p ɺɺ+ 2ζω0 x +ω x = e jωt ɺ x m 是复数,其特解为: x是复数,其特解为: x = Be jωt
2 0
{
jωt
c = 2ζω0 m k 2 = ω0 m
其中; 其中;B 为复振幅