第三章_单自由度机械系统动力学案例
- 格式:ppt
- 大小:1.43 MB
- 文档页数:40

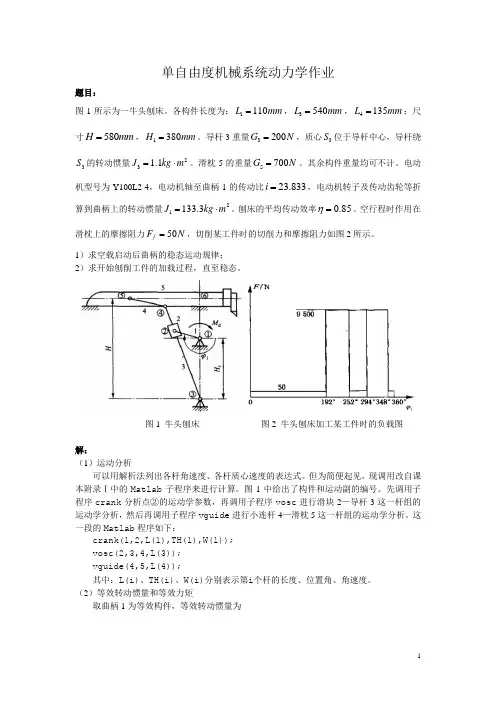
单自由度机械系统动力学作业题目:图1所示为一牛头刨床。
各构件长度为:1110L mm =,3540L mm =,4135L mm =;尺寸580H mm =,1380H mm =。
导杆3重量3200G N =,质心3S 位于导杆中心,导杆绕3S 的转动惯量23 1.1J kg m =⋅。
滑枕5的重量5700G N =。
其余构件重量均可不计。
电动机型号为Y100L2-4,电动机轴至曲柄1的传动比23.833i =,电动机转子及传动齿轮等折算到曲柄上的转动惯量21133.3J kg m =⋅。
刨床的平均传动效率0.85η=。
空行程时作用在滑枕上的摩擦阻力50f F N =,切削某工件时的切削力和摩擦阻力如图2所示。
1)求空载启动后曲柄的稳态运动规律; 2)求开始刨削工件的加载过程,直至稳态。
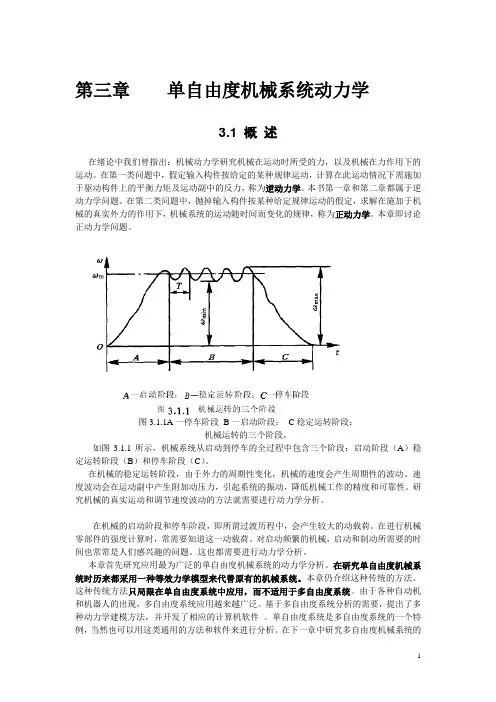
图1 牛头刨床 图2 牛头刨床加工某工件时的负载图 解:(1)运动分析可以用解析法列出各杆角速度、各杆质心速度的表达式。
但为简便起见,现调用改自课本附录Ⅰ中的Matlab 子程序来进行计算。
图1中给出了构件和运动副的编号。
先调用子程序crank 分析点②的运动学参数,再调用子程序vosc 进行滑块2—导杆3这一杆组的运动学分析,然后再调用子程序vguide 进行小连杆4—滑枕5这一杆组的运动学分析。
这一段的Matlab 程序如下:crank(1,2,L(1),TH(1),W(1)); vosc(2,3,4,L(3)); vguide(4,5,L(4)); 其中:L(i)、TH(i)、W(i)分别表示第i 个杆的长度、位置角、角速度。
(2)等效转动惯量和等效力矩取曲柄1为等效构件,等效转动惯量为2223335513111()()()S e J J J G v G v g g ωωωω=+++ (a) 式中:g 为重力加速度,3S v 为导杆3质心的速度,5v 为滑枕的速度。
等效驱动力矩可由电动机机械特性导出,设m M 、de M 分别为电动机输出力矩和等效驱动力矩,两者有如下关系:de m M iM = (b)式中i 为电动机轴和曲轴间的传动比。
第三章系统的时间响应分析机械⼯程控制基础教案Chp.3时间响应分析基本要求(1) 了解系统时间响应的组成;初步掌握系统特征根的实部和虚部对系统⾃由响应项的影响情况,掌握系统稳定性与特征根实部之间的关系。
(2 ) 了解控制系统时间响应分析中的常⽤的典型输⼊信号及其特点。
(3) 掌握⼀阶系统的定义和基本参数,能够求解⼀阶系统的单位脉冲响应、单位阶跃响应及单位斜坡响应;掌握⼀阶系统时间响应曲线的基本形状及意义。
掌握线性系统中,存在微分关系的输⼊,其输出也存在微分关系的基本结论。
(4) 掌握⼆阶系统的定义和基本参数;掌握⼆阶系统单位脉冲响应曲线、单位阶跃响应曲线的基本形状及其振荡情况与系统阻尼⽐之间的对应关系;掌握⼆阶系统性能指标的定义及其与系统特征参数之间的关系。
(5) 了解主导极点的定义及作⽤;(6) 掌握系统误差的定义,掌握系统误差与系统偏差的关系,掌握误差及稳态误差的求法;能够分析系统的输⼊、系统的结构和参数以及⼲扰对系统偏差的影响。
(7) 了解单位脉冲响应函数与系统传递函数之间的关系。
重点与难点重点(1) 系统稳定性与特征根实部的关系。
(2) ⼀阶系统的定义和基本参数,⼀阶系统的单位脉冲响应、单位阶跃响应及单位斜坡响应曲线的基本形状及意义。
(3) ⼆阶系统的定义和基本参数;⼆阶系统单位脉冲响应曲线、单位阶跃响应曲线的基本形状及其振荡情况与系统阻尼⽐之间的对应关系;⼆阶系统性能指标的定义及其与系统特征参数之间的关系。
(4) 系统误差的定义,系统误差与系统偏差的关系,误差及稳态误差的求法;系统的输⼊、系统的结构和参数以及⼲扰对系统偏差的影响。
难点(1) ⼆阶系统单位脉冲响应曲线、单位阶跃响应曲线的基本形状及其振荡情况与系统阻尼⽐之间的对应关系;⼆阶系统性能指标的定义及其与系统特征参数之间的关系。
(2) 系统的输⼊、系统的结构和参数以及⼲扰对系统偏差的影响。
建⽴数学模型后进⼀步分析、计算和研究控制系统所具有的各种性能。

§3 单自由度机械系统的动力学分析1e 21111111d d 21F qq J q J =+ 一、基于拉格朗日方程的动力学方程☐若 q 1 为位移,则 J 11 称为等效质量 ( m e ),F e1称为等效力 ( F e ) ;☐若 q 1 为角位移,则 J 11 称为等效转动惯量 ( J e ),F e1称为等效力矩 ( M e ) 。
∑∑==⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫⎝⎛+⎪⎪⎭⎫⎝⎛=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎪⎪⎭⎫⎝⎛+⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫⎝⎛=n j j S S j n j jS S S jq J q v m q J q y q x m J j j j j j 12121121212111d d d d d d ωϕ∑∑∑∑====±+=±+⎪⎪⎭⎫ ⎝⎛+=l j m k k kj j j lj m k kk j jy j jx q M q v F q M q y F q x F F 1111111111e cos ωθω单自由度机械系统的动力学分析“±” 取决于 M k 与的方向是否相同,相同为“+”, 相反则为“-” 。
k ω1. 等效动力学模型二、基于等效动力学模型的动力学方程单自由度机械系统的动力学分析☐单自由度机械系统仅有一个广义坐标,无论其组成如何复杂,均可将其简化为一个等效构件。
等效构件的角位移(位移)即为系统的广义坐标。
☐等效构件的等效质量(等效转动惯量)所具有的动能,应等于机械系统的总动能;等效构件上的等效力(等效力矩)所产生的功率,应等于机械系统的所有外力与外力矩所产生的总功率。
单自由度机械系统的动力学分析定轴转动构件 直线移动构件求出位移 S 或角位移的变化规律,即可获得系统中各构件的真实运动。
等效转动惯量等效质量等效力等效力矩☐等效量不仅与各运动构件的质量、转动惯量及作用于系统的外力、外力矩有关,而且与各运动构件与等效构件的速比有关,但与机械系统的真实运动无关;☐等效力(等效力矩)只是一个假想的力(力矩),并非作用于系统的所有外力的合力(外力矩的合力矩);等效质量(等效转动惯量)也只是一个假想的质量(或转动惯量),它并不是系统中各构件的质量(或转动惯量)的总和。