机械系统动力学PPT
- 格式:ppt
- 大小:1.09 MB
- 文档页数:28


第七章机械系统动力学本章学习任务:机械的机械效率,自锁现象及自锁条件,机械平衡的基本概念,刚性转子的静平衡设计与静平衡实验,刚性转子的动平衡设计与动平衡实验,平衡精度与不平衡量的计算;平面机构平衡的基本概念,质量代换方法,平面机构惯性力的部分平衡方法以及完全平衡方法。
机械系统运转过程、等效动力学模型与运动方程,机械系统波动调节。
驱动项目的任务安排:完成项目中机构动力学分析,给出平衡方法、速度波动调节方法。
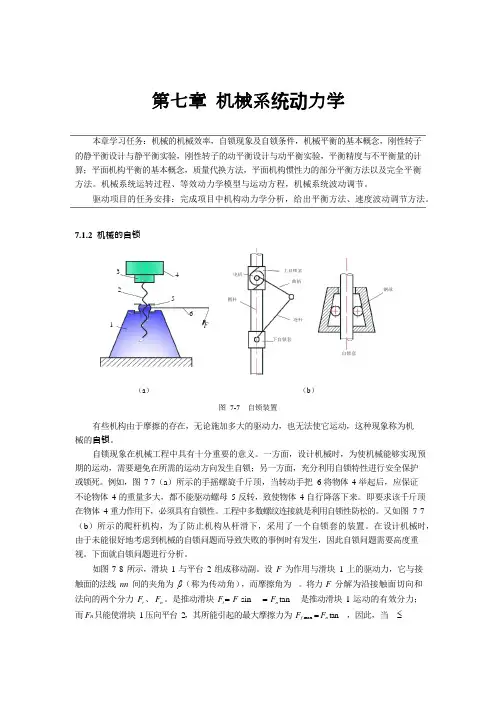
7.1.2机械的自锁钢球圆自锁套(a)(b)图7-7 自锁装置有些机构由于摩擦的存在,无论施加多大的驱动力,也无法使它运动,这种现象称为机械的自锁。
自锁现象在机械工程中具有十分重要的意义。
一方面,设计机械时,为使机械能够实现预期的运动,需要避免在所需的运动方向发生自锁;另一方面,充分利用自锁特性进行安全保护或锁死。
例如,图7-7(a)所示的手摇螺旋千斤顶,当转动手把6 将物体4 举起后,应保证不论物体4 的重量多大,都不能驱动螺母5 反转,致使物体4 自行降落下来。
即要求该千斤顶在物体4 重力作用下,必须具有自锁性。
工程中多数螺纹连接就是利用自锁性防松的。
又如图7-7(b)所示的爬杆机构,为了防止机构从杆滑下,采用了一个自锁套的装置。
在设计机械时,由于未能很好地考虑到机械的自锁问题而导致失败的事例时有发生,因此自锁问题需要高度重视。
下面就自锁问题进行分析。
如图7-8 所示,滑块1 与平台2 组成移动副。
设F 为作用与滑块1 上的驱动力,它与接触面的法线nn 间的夹角为β(称为传动角),而摩擦角为。
将力F 分解为沿接触面切向和法向的两个分力Ft 、Fn。
是推动滑块Ft=F sin =Fntan 是推动滑块1 运动的有效分力;而F n只能使滑块1 压向平台2,其所能引起的最大摩擦力为Ff max =Fntan ,因此,当≤342561F上自锁套电机曲柄杆连杆下自锁套时,有F t ≤ F f max(7-12)即在≤的情况下,不管驱动力 F 增大(方向维持不变),驱动力的有效分力 F t 总小 于驱动力 F 本身所可能引起的最大摩擦力,因而总不能推动滑块 1 运动,这就是自锁现象。